1. Motivation and Introduction
In recent years, much attention has been directed to smart materials such as shape memory alloys (SMAs) and shape memory polymers (SMPs) (cf., e.g., [
1,
2]). It is of great interest to simulate thermo-coupled deformation behaviors of such materials under both loading and heating. Unlike deformation behavior of SMAs with very small elastic deformations, however, SMPs exhibit complicated thermo-mechanical deformation effects coupled with both temperature and large recoverable deformations. Typical representatives of such effects are the stress softening effect at unloading in the isothermal case and the strain recovery effect at pure heating. The former is characteristic of all kinds of polymers and associated with a number of unloading stress-strain curves of complex shapes that differ from one another and result in different permanent sets, while the latter is unique to SMPs and related to the recovery of a large pre-strain at heating. Usually, recoverable strains of SMPs both at unloading and at heating may be several hundred percents. As such, large thermo-coupled inelastic deformations incorporating large recoverable deformations should be treated toward modeling thermo-mechanical behavior of SMPs, in particular, in simulating both the stress-softening effect at unloading and the large strain recovery effect at heating (i.e., the shape memory effect).
Many efforts have been made to establish constitutive models for the purpose of incorporating the above two effects. As a typical isothermal deformation feature for various kinds of polymers, the stress softening effect at unloading was observed earlier and has been simulated for some time. Results in this respect have been given based either on phenomenological models with damage-like variables or micro-mechanical models with macromolecular mechanisms. Representatives in these respects may be found, e.g., earlier in [
3] and later in [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14] for phenomenological models, and in [
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25] for micro-mechanical models. On the other side, the modeling of the shape memory effect for SMPs is relatively recent. Results in this respect and, generally, in the thermo-mechanical behavior of SMPs may be found, e.g., in [
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39] and many others.
In the existing models, usually a large number of parameters should be introduced from various standpoints. For a given material sample, in order to find out suitable values of these parameters, complicated numerical procedures should be iteratively carried out to obtain model predictions for stress, strain and temperature from a constitutive model consisting of several nonlinear differential equations, until such parameter values are found that the model predictions with these values fit test data given for this sample as closely as possible. Undue complexities would be expected in identifying a large number of parameters coupled with one another. In particular, that may be the case in fitting a number of unloading curves of different shapes. Even if the model applicability is validated for a material sample, it may not be clear that that will be the case for another material sample. Moreover, both the stress softening effect and the shape memory effect are usually treated separately and could not be simultaneously simulated in a unified and accurate sense.
In this contribution, we are going to propose an explicit, direct approach toward modeling thermo-mechanical behavior of SMPs. It is shown that finite thermo-coupled inelastic deformation behavior of SMPs may be simulated by establishing new finite elastoplastic
-flow models with thermo-coupled effects. In particular, both the stress softening effect at unloading and the shape memory effect at heating may be derived from the proposed model. The main idea is incorporation of an elastic potential evolving with development of plastic flow and introduction of thermo-induced plastic flow, as suggested in a previous study for polymeric solids [
40]. New results will be presented in four respects, namely, (i) any ad hoc variables associated with micro-structural mechanisms are not involved; (ii) any given number of unloading curves of any given shapes in the softening effect may be accurately simulated; (iii) any given shape of temperature-strain curve in the strain recovery at heating may also be accurately simulated by means of explicit, direct procedures; and (iv) the parameter values may be identified in decoupled manner.
The main context of this article is organized as follows. In
Section 2, a thermo-coupled elastoplastic
-flow model will be proposed, with incompressible elastic behavior evolving with development of plastic flow. In
Section 3, the evolving elastic potential and the yield limit incorporated in the proposed model will be determined from any given sets of data for the stress softening in the uniaxial unloading case, in a sense that such data may be automatically, accurately fitted. In
Section 4, simple forms of the shape functions representing the loading and unloading curves in the uniaxial case are presented. In
Section 5, large strain recovery effect at heating is treated by means of explicit procedures. In
Section 6, numerical examples will be presented to fit test data for both the stress-softening effect at unloading and the strain recovery effect at heating. Finally, remarks for further studies will be given in
Section 7.
2. Thermo-Coupled -Flow Model with Evolving Elastic Potential
In this section, a new elastoplastic
-flow model with evolving elastic behavior is proposed with particular reference to thermo-mechanical behavior of SMPs, which is a reduced form of the previous model [
40] for polymeric solids in a broad case.
We direct attention to the consistent Eulerian rate formulation of finite elastoplasticity based on the corotational logarithmic rate. Detail in this respect may be found in, e.g., [
41,
42,
43]. Let
and
be the deformation gradient and its transposition and let
and
be Hencky’s logarithmic strain and the stretching. Moreover, let
and
be the Kirchhoff stress and its deviatoric part, namely,
and
, where the
and
are the Cauchy stress (true stress) and its deviatoric part, respectively.
2.1. Additive Decomposition of Stretching
The starting point is the additive decomposition of the stretching
into an elastic part,
, and a plastic part,
, as given below:
An objective rate equation should be given for the elastic part , which governs finite hyperelastic behavior of SMPs. Moreover, a flow rule should be given for the plastic part , which governs dissipated inelastic behavior of SMPs. These two equations will be given below, separately.
2.2. Thermo-Elastic Rate Equation with Evolving Potential
The thermo-elastic behavior is characterized by a strain energy function, also known as elastic potential. Usually, this potential keeps unchanged under the assumption that any process of inelastic deformations has no effects on the elastic behavior. As a departure from usual treatment, here an evolving elastic potential is introduced. This idea will prove essential in simulating the stress softening behavior at unloading, as has been shown in a previous study [
40].
For our purpose, a complementary elastic potential characterizing thermo-elastic behavior of SMPs is introduced as follows:
where the
T is the absolute temperature and the
is the effective plastic work and will be given slightly later by Equation (
11). In the above, the second term represents the volumetric expansion effect arising from temperature change, while the first term implies the incompressibility effect in the isothermal case. Note here that the thermal expansion parameter
is usually very small, but becomes appreciable in a thermal process through the glass transition.
Then, the elastic part
is determined by an objective Eulerian rate equation below [
40]:
where
is the 2nd-order identity tensor and
is the logarithmic rate of the deviatoric Kirchhoff stress
. Here and henceforth, the notation
designates the material time rate of the time-varying quantity
A.
Following the procedures in [
43], it may be demonstrated that, prior to the initial yielding with
, the elastic rate Equation (
3) is exactly integrable to deliver a finite hyperelastic relation, namely,
This explains the meaning of the complementary elastic potential
. Since the latter evolves with the effective plastic work
κ (cf., Equation (
11) below), it may be clear that the elastic behavior will be different for different cases of unloading.
2.3. Normality Rule with Thermo-Induced Plastic Flow
The plastic part
in the decomposition Equation (
1) is prescribed by the following normality rule [
43,
44,
45]:
where the yield function
f is of von Mises type:
In the above, the back stress
is traceless and introduced to characterize the anisotropic or kinematic hardening induced by plastic flow and the stress limit
r represents the isotropic hardening behavior and, generally, relies on both the effective plastic work
and the temperature
T, viz.,
In addition, the plastic indicator
takes values 1 and 0 for the loading and unloading cases [
43,
44,
45], namely,
The plastic modulus will be given later on.
The back stress
is governed by the evolution equation below:
In the above,
is the magnitude of the deviatoric stress, i.e.,
Throughout, the effective plastic work
is given by
The flow rule Equation (
5) with the loading-unloading conditions Equation (
8) introduces plastic flow induced by changing temperature and, in particular, this is the case in the absence of stress. This fact will play an essential role in modeling the strain recovery effect at heating, as will be explained in
Section 5.
2.4. On the Thermodynamic Consistency
In a sense of thermodynamic consistency, a constitutive model should fulfill the second law formulated by the Clausius-Duhem inequality. It may be straightforward to demonstrate the thermodynamic consistency of the proposed model following the procedures in previous works [
40,
43,
46,
47,
48] in an explicit sense of presenting both the specific free energy function and the specific entropy function. Detail is not pursued here and may be referred to the foregoing references.
2.5. The Meanings of Constitutive Quantities
The finite elastoplastic
-flow model established in the above are represented by three constitutive quantities, namely, the evolving elastic potential
(cf., Equation (
2)) and the yield limit
r (cf., Equation (
7)) as well as the Prager modulus
c (cf., Equation (
10)). Of them, the former characterizes nonlinear elastic behavior evolving with plastic flow and hence the stress-softening behavior at unloading, while the latter two characterize features of plastic flow. As has been known in theory of elastoplasticty, the strain-induced anisotropy may be represented by the von Mises function Equation (
6) with the evolution of the back stress
(cf., Equation (
9)). Perhaps more essentially, both the back stress
and the temperature-dependent yield limit
r will give rise to thermo-induced plastic flow leading to the shape memory effect, as will be seen in
Section 5. The form of the potential
should be well chosen, so that unloading stress-strain curves may be simulated. Furthermore, the yield limit
r and the Prager modulus
c should be such that they joins the potential
to characterize the development of plastic flow.
In the succeeding sections, both the stress softening effect at unloading and the shape memory effect at heating will be derived from the proposed model. Toward this objective, we are going to show that the constitutive quantities in the foregoing may be determined from suitable uniaxial data for the stress-softening effect at unloading and for the strain recovery effect at heating, in such a sense that the predictions from the proposed model can exactly reproduce these data.
3. Stress-Softening Effect at Unloading
In this section, we first take the isothermal case into account. In this case, the temperature
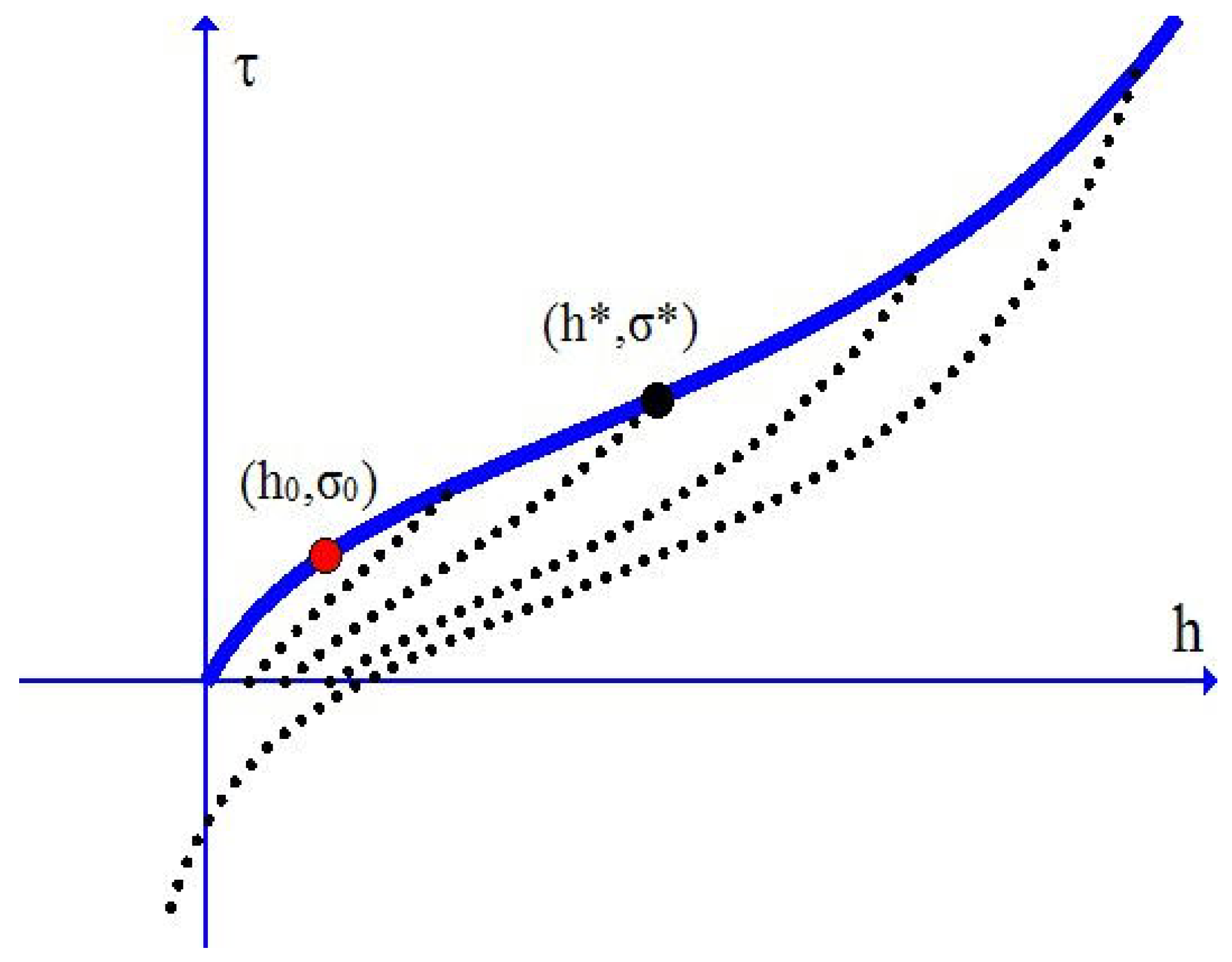
T is not involved. For a SMP sample, test data for uniaxial responses are given both for the monotone loading case and for various cases of unloading, as shown in
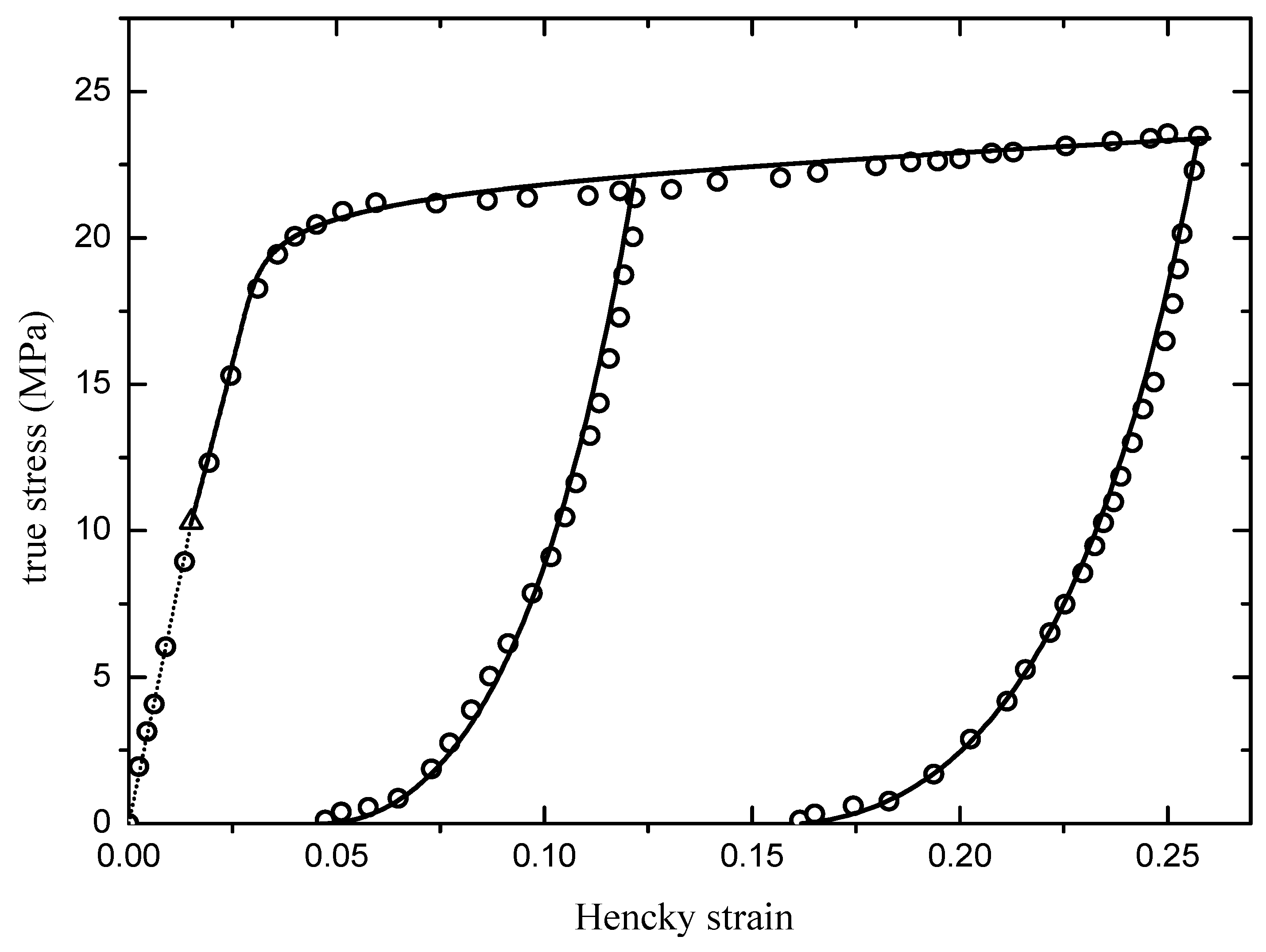
Figure 1. For usual models with certain parameters to be identified, model predictions for given trial values of parameters should be compared with test data for the purpose of model validation. For a reasonable model, by means of trial-and-error procedures of searching for suitable forms of the constitutive functions and parameters, agreement with test data should be eventually achieved after iterative numerical procedures. Since both the loading curve and each unloading curve display complicated nonlinearities coupled with large strain and, in particular, a number of unloading curves should be taken into consideration and any two of them may be of different shapes, as shown in
Figure 1, usual implicit procedures for both searching for reasonable forms of constitutive functions and identifying a set of unknown parameters would be unduly complicated.
We are going to demonstrate that, toward representing the stress-softening behavior of SMPs, explicit procedures may be introduced to obtain the three constitutive quantities in the proposed model, in such a sense that the model predictions can automatically, accurately fit any given sets of data both for the uniaxial monotone loading case and for various unloading cases.
3.1. Uniaxial Loading and Unloading Curves
Figure 1 shows the stress-softening effect at unloading, i.e., the well known Mullins effect. When a sample is loaded to a certain point
and then unloaded, there emerges the stress-softening effect as described below:
- (i)
After the unloading is completed, a residual strain (permanent set) may be induced. The stress-strain curve in an unloading process may appreciably deviate from the monotone loading curve up to the unloading point at the onset of unloading;
- (ii)
for each strain , the stress on the unloading curve is always lower than the stress on the monotone loading curve, referred to as stress softening at unloading;
- (iii)
when reloading is introduced, the part of the reloading curve till the point is nearly coincident with the unloading curve in the foregoing, but the part of the reloading curve after the point follows the monotone loading curve after a transition at the point .
For a SMP sample of interest, test data are given for the loading curve and for a certain number of unloading curves. Consider
M data sets for the unloading curves associated with
M unloading stresses
which correspond to
M values of the effective plastic work below:
Specifically, for the unloading curve associated with the unloading stress
or the effective plastic work
for each
, a set of strain-stress data is given below:
In the above, the first point is just given by the strain and the stress at the onset of unloading, and, moreover, the residual strain (permanent set) at vanishing stress, i.e., the point , should be incorporated in the above set of data.
For any given data for the loading curve and any given sets of data for a certain number of unloading curves, as described in the above, it needs to find out such three quantities
(cf., Equation (
3)) and
r (cf., Equation (
7)) and
c (cf., Equation (
9)) that the predictions from the model established in
Section 2 fit these data as closely as possible. In what follows, we are going to show that explicit procedures may be introduced to obtain these constitutive quantities in a sense of accurately matching test data for any given shapes of loading and unloading curves.
3.2. The Evolving Elastic Potential
We first present the evolving elastic potential
. The main procedures will follow those suggested in a previous study [
40]. Details will be omitted below and may be referred to this reference.
A single-variable function for the unloading curve starting at the unloading point
may be obtained in a sense of accurately fitting any given date set as shown in Equation (
12). Indeed, it may be given by an interpolating function, such as a Lagrange interpolant and an other form of function. Let such a function be designated by
with
In the uniaxial case, it may readily be shown that the evolving potential Equation (
2) reduces to a function of the axial Kirchhoff stress
and the effective plastic work
, denoted
For the unloading curve starting at the unloading point
, the elastic rate Equation (
3) with
yields
For the unloading curve at issue, the effective plastic work is held fixed and given by
. Then, the integration of this equation from the point
to the point
in an unloading process gives rise to
where
. In deriving Equation (
15), the following initial condition is used:
From Equation (
15) and
we deduce
From the above procedures we obtain
M uniaxial potentials
for the
M unloading curves at issue. However, each of them is restricted to the uniaxial case. The potential for general multiaxial deformations is obtainable from these uniaxial potentials by means of direct procedures. In fact, replacement of the axial Cauchy stress
in each potential
with the invariant
(cf., Equation (
10)) multiplied by the mode invariant
γ (cf., [
49]) yields a multi-axial potential below:
It may be verified that, in the uniaxial case, each function
for general multi-axial deformations, given by Equation (
19), exactly supplies its uniaxial counterpart
. We seek for a multi-axial potential
which exactly gives the
M multi-axial potentials
for
. Such a potential may be given by an interpolating function with the
M interpolating nodes
for
. For instance, it may be given by a Lagrange interpolant below:
with the Lagrangian base functions
It may be a straightforward matter to show that, in the uniaxial case, the multi-axial potential Equation (
20) exactly supplies the
M uniaxial potentials
given by Equation (
18) and, therefore, exactly fit any given
M sets of data for
M unloading curves (cf., Equation (
13)).
With sufficient test data for a certain number of unloading curves, a single-variable function representing each unloading curve may be directly given either by an interpolating function or by choosing an other suitable form of function (see
Section 4) .
3.3. Stress Limit and Prager Modulus
We next determine the stress limit
r and the Prager modulus
c. Let a set of data be given for a monotone stress-strain curve starting at the initial yield point
(cf.,
Figure 1). Then, a single-variable function representing this curve may also be directly given either by an interpolating function or an other form of function, as shown below:
For the monotone loading in the uniaxial case, from the
-flow model in
Section 2 the four reduced equations below may be derived:
In the above,
is the reduced form of the elastic potential Equation (
20) in the uniaxial case and given by
where
and
are given by Equations (18), (22) and (23).
In the monotone loading case, the axial stress
may be reformulated as a function of the effective plastic work
, namely,
As such, from the last three of the foregoing four equations the following two equations may be derived:
The stress limit
r may be given as follows [
40,
46,
47,
48]:
where
is a constant and
is a large dimensionless parameter. For a large
, the exponential function in Equation (
26) rapidly goes to vanish for
and the stress limit above is almost constant, i.e.,
for
. Here
is very small. The localized property just mentioned means that, after the initial yielding, the stress limit
r may be taken to be constant and given just by
, as will be done below.
By setting
, the integration of Equation (
25)
2 from the initial yield point
to a point
along the monotone curve in
Figure 1 yields
At each unloading point
, the derivative
is just given by Equation (
15) with
. From this and Equation (
17) and
we obtain the effective plastic works at the
M unloading points as follows:
where
and
are the plastic strain and the effective plastic work associated with the
s-th unloading curve.
Next, Equation (
25)
2 with
may be converted to
From this and Equation (
25)
1, an expression for the Prager modulus
c in the uniaxial case may be obtained in terms of the axial stress
and the
. Replacing
by the invariant
in Equation (
19) we eventually obtain Prager’s modulus for general multi-axial cases as follows:
where
where
is given by Equations (22) and (23).
4. Shape Functions for Uniaxial Loading and Unloading Curves
With the evolving elastic potential
, the stress limit
r and the Prager modulus
c given in the last section, the elastoplastic
-flow model established in
Section 2 exactly reproduces the monotone loading curve
and any given number of unloading curves,
. It may be straightforward to find out suitable forms of such single-variable functions fitting any given data for the monotone loading case and for various unloading cases, without involving usual complicated procedures of treating several nonlinear differential equations incorporating a number of parameters to be identified. The foregoing two kinds of single-variable functions, referred to as the shape functions for loading und unloading curves, may be given directly by usual interpolating functions fitting any given data without error. Alternatively, these shape functions may also be given by other forms of functions. In particular, it is of interest to have simple forms of shape functions with parameters of direct physical meanings. Such forms of shape functions are given below.
Firstly, below a simple form of the shape function is given to represent each unloading curve:
and its inverted form is as follows:
In the above,
is the plastic strain after unloading,
E is the Young’s modulus at infinitesimal strain,
u is the strain limit and
is dimensionless parameter characterizing the growth degree of stress as the strain is approaching the strain limit
u. In general, each of these parameters may rely on the effective plastic work
, namely,
For each unloading curve associated with a value of the effective plastic work, values of the above parameters may be determined by fitting the above shape function to given data. As such, a set of parameter values may be obtained for a family of unloading curves. Then, each of the foregoing -dependent parameter may also be given directly by an interpolating function. It may be noted that the parameters introduced directly represent the very features of each elastic unloading curve at issue and, accordingly, are determinable from each unloading curve in a decoupled manner.
In particular, the unloading curve starting at the initial yield points
is associated with
and coincident exactly with the initial elastic curve from the origin to the initial yield point (cf.,
Figure 1). This curve may be given simply by a linear relation between the axial stress
and the axial Hencky strain
h, namely,
where
is the initial Young’s modulus.
On the other hand, the shape function for the monotone loading curve starting at the initial yield points
may be given by (c.f., [
46,
47,
48])
The meanings of the parameters incorporated may be found in previous works [
46,
47,
48].
The above shape functions for the monotone loading curve and the unloading curves of SMPs are new and much simpler, as compared with the counterparts in a most recent study [
40]. With these new shape functions, accurate accord with test data may be achieved, as will be shown in
Section 6.1.
5. Large Strain Recovery Effect at Heating
In this section, large strain recovery effect in a thermo-mechanical process consisting of an isothermal loading-unloading process and then a heating process will be derived from the proposed model. It will be shown that the proposed model predicts a pre-strain induced in the isothermal loading -unloading process and then a plastic flow induced in the heating process. It will further be shown that such thermo-induced plastic flow may be responsible for the recovery of the pre-strain induced in the isothermal loading-unloading process. This represents the very feature of the shape memory effect of SMPs. It will also be shown that, from the proposed model, simple and exact results may be derived for a general multiaxial case.
5.1. Pre-Strain Induced at Isothermal Loading-Unloading
We first consider an isothermal loading-unloading process. Let the temperature be held fixed and given by
. In this case, a polymer sample is monotonically loaded to a certain stress level and then unloaded to zero stress. The stress and strain responses at both loading and unloading may be determined from the proposed model with the isothermal constitutive quantities obtained in
Section 3. For the uniaxial case, in particular, the response at loading is given by Equation (
23) and the response at unloading by one of those in Equation (
13).
After unloading at temperature
, a pre-strain or permanent set, denoted
, is induced, namely,
and, besides, the effective plastic work and the back stress are designated by
and
, viz.,
Note here that a general multi-axial case is taken into account.
5.2. Thermo-Induced Plastic Flow at Heating
We next treat a process of pure heating with the temperature
T changing from
to
. In this case, the stress limit
r relies merely on the temperature
T. Usually,
r should decrease with increasing temperature. Namely,
With an initial temperature
held fixed, a pre-strain or plastic strain is induced in a SMP sample via a loading-unloading process at constant temperature
, as indicated in
Section 5.1. Let
The unloading at
leads to
Consider a heating process with
. On account of Equation (
39), the
increases with increasing temperature and hence it may increase from the initial value
at
to zero at a certain temperature
, namely,
Moreover, with
and
as well as Equation (
40) we deduce that
Hence, from Equation (
8)
1 it follows that the loading condition is met. Thus, plastic flow may be induced at pure heating and emerges for
.
By setting
in the rate equations given in
Section 2, the governing equations for the thermo-induced plastic flow as indicated above may be derived as follows:
with the initial conditions at
given below:
In deriving Equation (
49), the following fact has been used: only thermo-elastic volumetric deformation is induced from
to
.
A closed-form solution may be derived from the above equations. Results are as follows:
for the back stress, and
for the deformation gradient and Hencky’s logarithmic strain, and, finally,
for the effective plastic work.
5.3. Strain Recovery Effect
Equation (
51) supplies a closed-form solution for the Hencky strain in a thermo-mechanical process consisting of an isothermal loading-unloading process at constant temperature
and then a pure heating process from
to a higher temperature
T, in which a thermo-induced plastic flow is induced from
to
T. This result has been derived for a general multi-axial case. The Hencky strain given is composed of three parts, namely, the pre-strain
at
, the thermo-elastic volumetric strain
, as well as the part from the thermo-induced plastic flow. The thermo-elastic expansion part is usually very small, but it may become appreciable in a process through the glass transition in some cases. Generally, the thermo-elastic expansion effect over a temperature range may be simulated by choosing a suitable form of the temperature-dependent quantity
.
With negligible thermo-elastic expansion, it may be demonstrated [
40] that the minimum of the magnitude of the strain
as given in Equation (
51) is always smaller than the initial value
at
. This suggests that generally the thermo-induced plastic flow in a process of pure heating always leads to a partial recovery of any given pre-strain. As such, the thermal recovery at pure heating is derived as a direct, natural consequence of the thermo-coupled elastoplasticity model established in
Section 2. In particular, it may be deduced that the complete recovery of any given pre-strain emerges whenever
with the
a constant. In particular, the above co-axiality condition is identically fulfilled in the uniaxial strain case.
Now, the Prager modulus
c is taken to be of the following form [
40]:
In the above,
and
is a large dimensionless parameter. Then, the Hencky strain for
is given by (c.f., [
40])
This result applies to a general multiaxial case. Given any form of the uniaxial temperature-strain relation,
, the temperature-dependent stress limit
r is thus determined, as shown below:
With the above stress limit, the proposed model exactly reproduces the strain-temperature relation and, accordingly, any given uniaxial data for strain recovery may be automatically, accurately fitted.
An example for the stress limit
r with strain recovery is given as follows:
where both the temperature
at the initial yielding (cf. Equation (
42)) and the temperature
may be of any given values. The corresponding strain-temperature function is given by
For a fairly large , any given large pre-strain, , is almost completely recovered at a temperature slightly higher than , as will be seen in the numerical example in the next section.
6. Numerical Examples
According to the results derived in the preceding sections, the predictions from the proposed model may automatically, accurately fit any given data for both the stress-softening effect and the strain recovery effect simply by choosing three shape functions
,
,
that accurately fit these data. As indicated before, it may be straightforward to present these three shape functions by choosing usual interpolating functions. However, they may be given by other forms of functions. As illustrative examples, in this section the simple forms of shape functions given in
Section 4 and
Section 5.2 will be used to fit test data in literature.
In what follows, test data will be fitted by using the shape function Equation (
36) for the initial elastic curve, the shape function (37) for the monotone loading curve and the shape function (34) for the unloading curve, as well as the strain-temperature function Equation (
57) for the strain recovery curve.
Below, the model predictions will be compared with two sets of data in literature, separately.
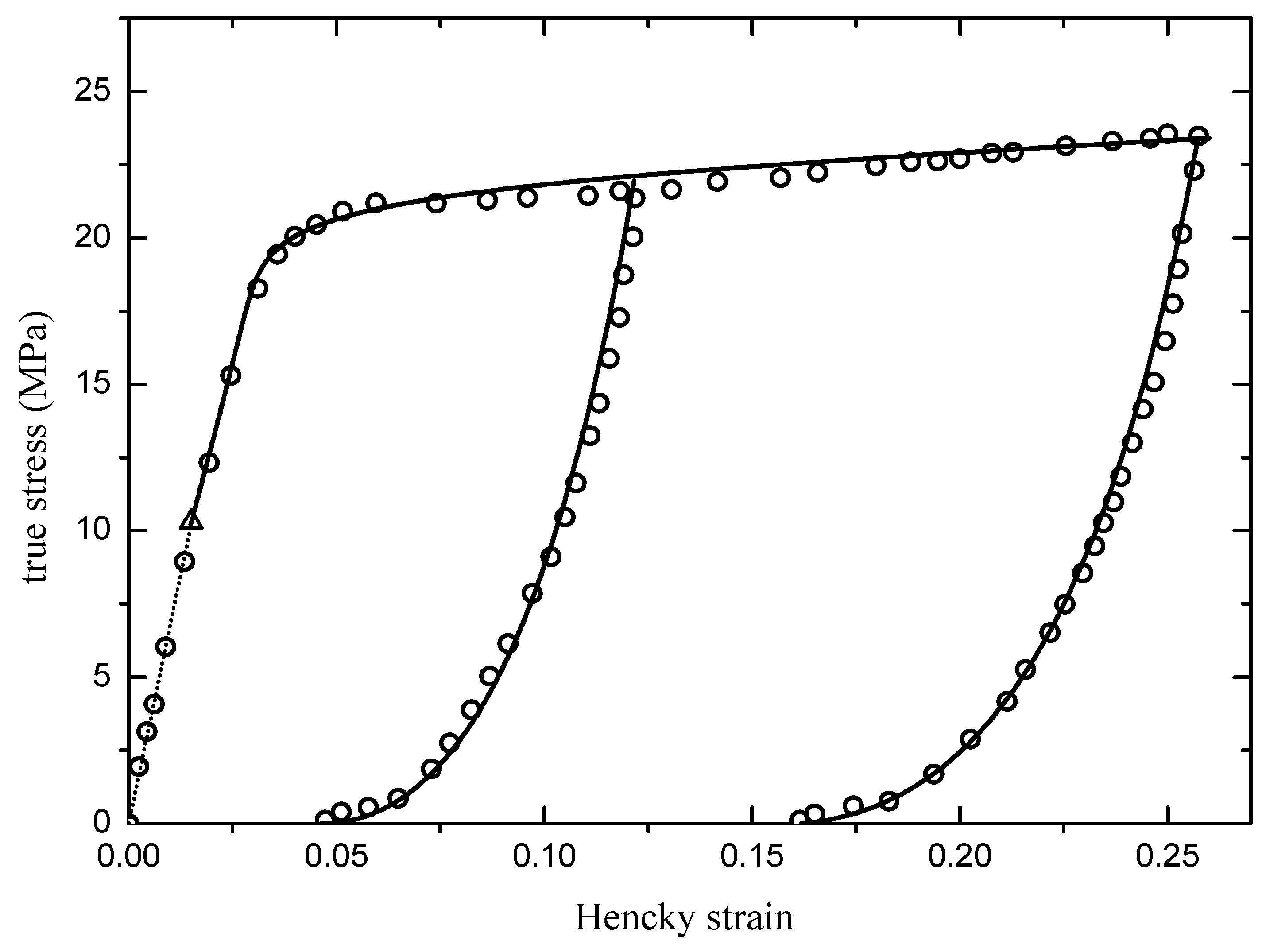
6.1. Data for Stress-Softening Effect at Unloading
We first consider the data from [
27]. These data (Figure 8) are concerned with a SMP resin sample for the monotone loading case till the strain 23% and then for two unloading cases starting at two strains of 11% and 23%, separately.
The initial elastic curve is given by Equation (
36) with
The shape function for the monotone loading curve is given by Equation (
37) with the parameter values below:
The two unloading curves are fitted by the shape function Equation (
34) with
for the first unloading curve, and
for the second unloading curve. Results are shown in
Figure 2 by plotting the curves of the axial true stress against the axial Hencky strain. Good agreement with the given data is achieved.
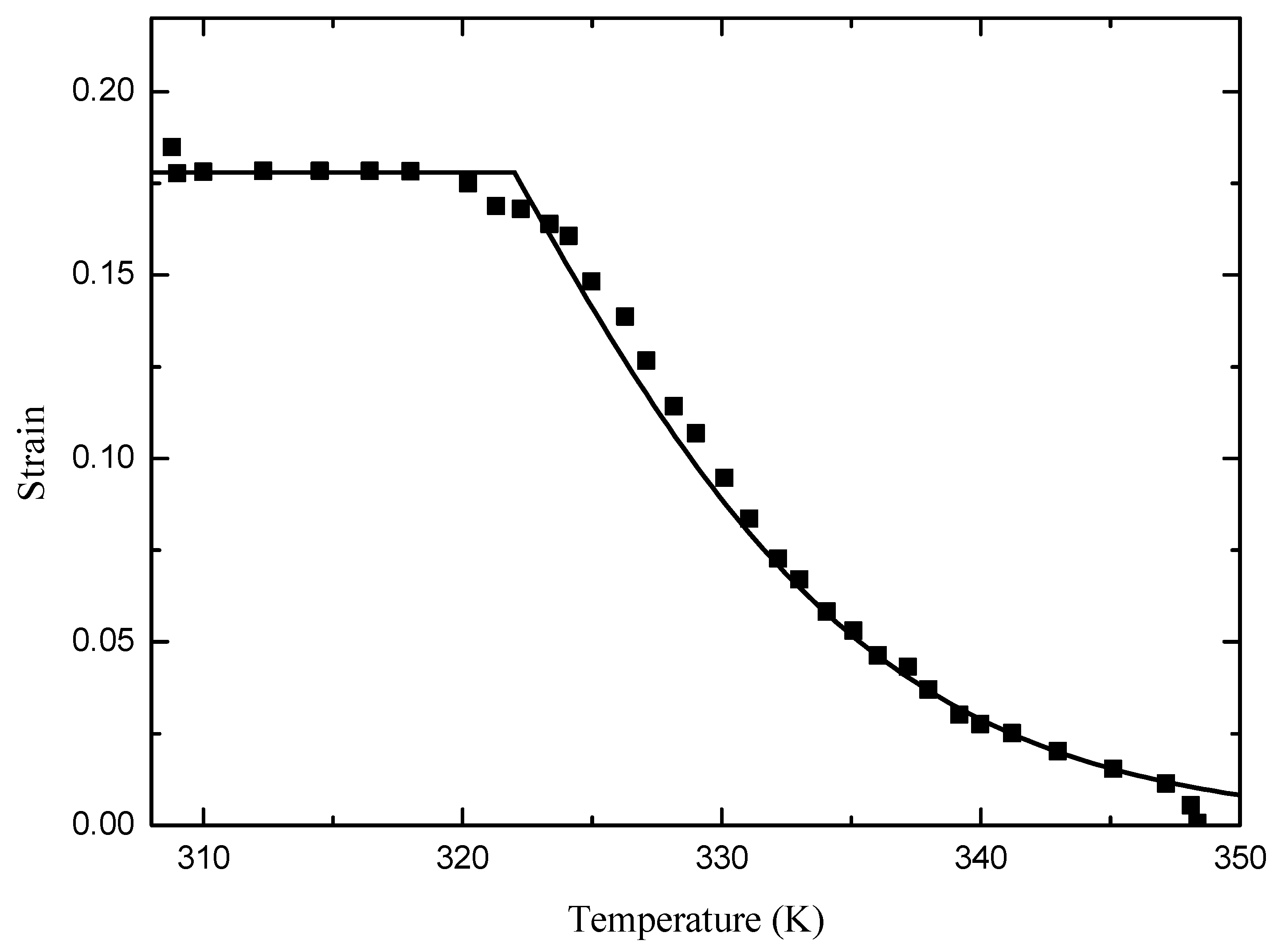
6.2. Data for Strain Recovery Effect at Heating
We next consider the data from [
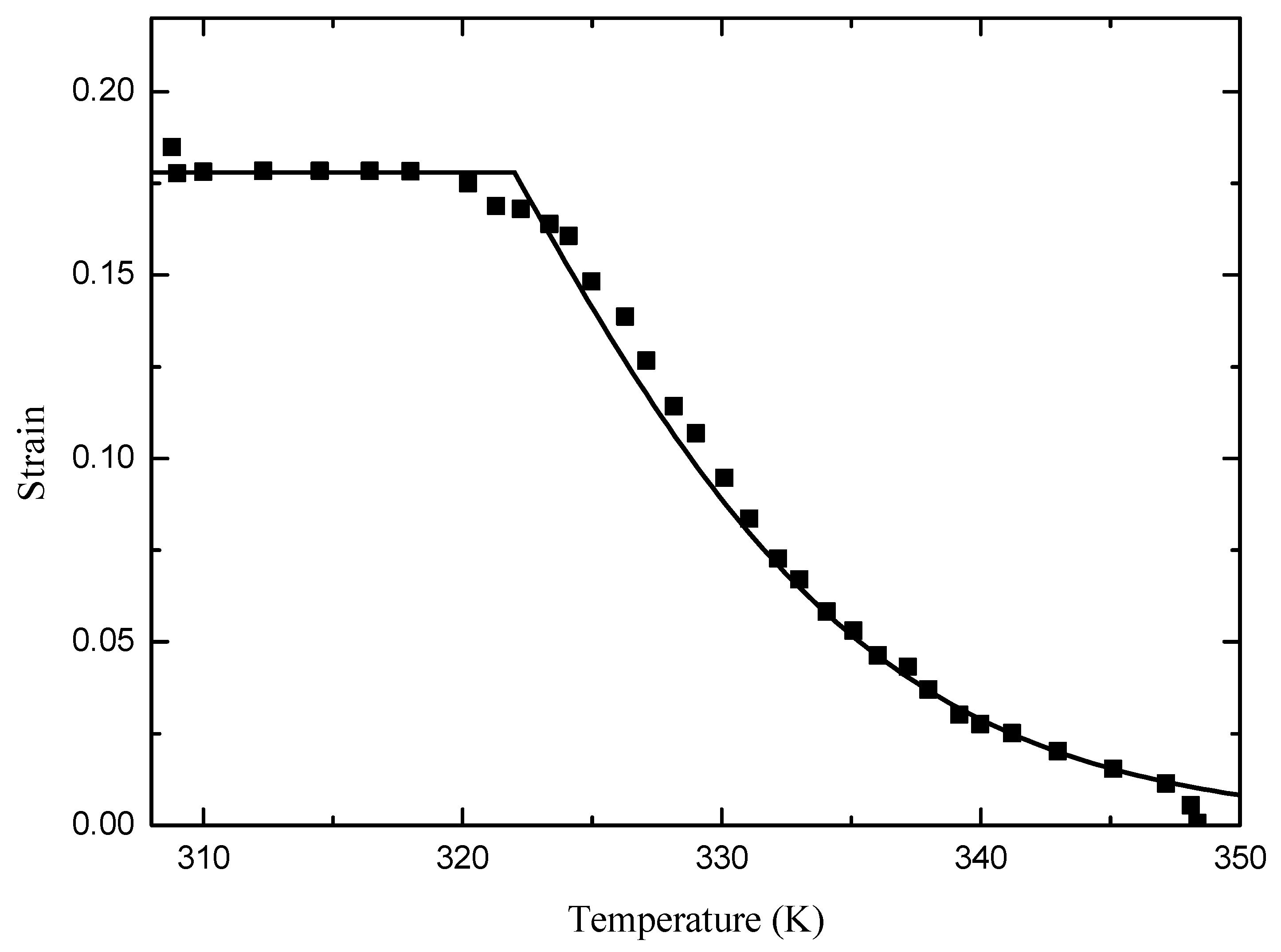
26] (Figure 5c), which are concerned with the strain recovery effect of a SMP sample in a heating process from 320 K to 350 K with the pre-strain 0.164.
The strain-temperature function Equation (
57) is used to fit the data at issue, with the parameter values below:
Results are shown in
Figure 3 by plotting the curve of the temperature against the axial Hencky strain. Again, good agreement with the given data is achieved.
7. Concluding Remarks
In the preceding sections, a new thermo-coupled elastoplastic -flow models with evolving elastic behavior has been proposed to achieve an explicit, direct simulation of complicated inelastic behavior of SMPs displaying both the stress softening effect at unloading and the strain recovery effect at heating. The constitutive quantities incorporated in the proposed model are explicitly determined from suitable uniaxial data. Extensive test data for any given shapes of loading and unloading curves as well as the strain-temperature curve may be accurately, automatically fitted by means of single-variable shape functions. It has been demonstrated that all may be done in the scope of classical elastoplasticity and, therefore, that no additional variables need be introduced and treated. Usual implicit, complicated procedures both in searching for suitable forms of constitutive functions and in identifying values of unknown parameters may be bypassed.
This study represents a development of the model suggested in a most recent study [
40]. Results in this reference are derived for certain usual deformation features of polymeric materials. However, new treatments need further be introduced for the purpose of simulating thermo-mechanical deformation features unique to SMPs. In fact, SMPs exhibit thermal effects and loading-unloading response features that differ in nature from those for usual polymers. As a consequence, the shape functions representing the loading curve and each unloading curve (cf.,
Figure 1) need be given in other suitable forms and, moreover, both thermal expansion and strain recovery need be considered in a unified manner. Here, new forms of shape functions that apply to deformation features of SMPs are presented in
Section 4 and closed-form results with both thermal expansion and strain recovery effects are derived in
Section 5. Good agreement with test data is achieved.
It should be pointed out that thermo-mechanical deformation features of SMPs may be simulated from various standpoints, as mentioned in the introduction section. Various constitutive models may be established based on additional variables associated with micro-structural mechanisms. Representatives are those based on either transition between micro-structural phases or evolution of macromolecular networks. For instance, transition between an active and a frozen phase is considered in [
32] with a volume-fraction variable for the frozen phase, while evolution of a reversible and a permanent network is treated in [
36,
37,
38]. It may be noted that the volume-fraction variable has been fruitfully used in modeling thermo-mechanical behavior of SMAs with the martensite-to-austenite phase transition mechanism. On the other side, various types of networks are directly related to certain aspects of cross-links and entanglements of chain-like macromolecules in polymeric materials.
Irrespective of the fact that the proposed model is straightforward in a sense without assuming any ad hoc variables of micro-structural origins, it may be of significance to explain how it accommodates itself to relevant underlying micro-mechanisms. For instance, the back stress
, which plays an essential role in deriving the thermo-induced plastic flow responsible for the strain recovery effect in
Section 5, may be explained based on the notion of a permanent network as introduced in [
36,
37,
38]. In general, each macroscopic constitutive quantity introduced in the proposed model may be related to relevant micro-mechanisms via suitable averaged procedures. This respect need be studied in future.
It is known that thermo-mechanical responses of SMPs depend on both strain rate and thermo-mechanical history. For example, the loading curve and each unloading curve as shown in
Figure 1 will be changed by strain rate and cyclic loading. In particular, cyclic thermo-mechanical loadings may lead to fatigue failure. Rate effects may be incorporated by introducing a rate-dependent stress limit in extending the proposed model. Furthermore, fatigue failure behavior may be simulated by extending the plastic flow Equation (
5) to a new, free plastic flow equation without involving the usual loading-unloading conditions as stipulated in Equation (
8). These may be done by a development of the most recent study [
50,
51]. Results will be reported elsewhere.
It should be noted that the anisotropy effect induced by plastic strain may be simulated by the proposed model with evolution of the back stress. For a SMP with initial anisotropy, such as a SMP composite with preferred directions, the thermo-elastic potential
in Equation (
2) should be restricted by the form-invariance requirements relative to a symmetry group representing the initial material symmetry. Detail may be found in [
43].


{kind=link}
{kind=link}
{kind=link}