1. Introduction
With the massive consumption of fossil fuels, energy and environmental pollution are becoming increasingly prominent problems. Developing clean renewable energy to replace the traditional fossil energy is a global urgent requirement. Under such a background, wind energy in deep-water area has attracted worldwide attention in recent years. Based on decades of experience from offshore oil and gas industry, several conceptual floating platforms have been proposed to support large wind turbines in deep-water regions, including spar, tension leg, barge, and semi-submersible.
Different from fixed-bottom wind turbines, the associated rotation and translation of the floating platform induced by the wave and wind loadings can significantly augment the oscillation and loads of wind turbine. Therefore, vibration and load reduction of the floating offshore wind turbine (FOWT) is crucial to the life cycle safety. One approach for vibration alleviation is to utilize structural control devices, which has been successfully applied in civil engineering structures, such as buildings and bridges [
1]. Moreover, because the passive vibration control is more robust and less expensive than the active vibration control, it has been extensively adopted in high-rise structures [
2,
3] and offshore platforms [
4,
5]. Thus, it is also expected to be a promising solution for inhibiting the vibration of FOWT. Lackner et al. [
6,
7] established 3 degree-of-freedom (DOF) simplified structural models for barge, spar and tension lag platform types of floating wind turbines, respectively, and optimized the tuned mass damper (TMD) configurations for each type of foundation using a genetic algorithm. They also concluded that the active control device achieved more load reductions than passive TMD. Compared with the other floating foundation, the barge-type floating wind turbines exhibit larger response [
8]. Taking the ITI energy barge 5 MW FOWT as an example, He et al. [
9] pointed out that the maximum suppression rates of vibration responses vary from 20% to 50% as the mass ratio changes from 0.5% to 2%. Furthermore, Li et al. [
10] investigated the active control strategies of TMD device and found that the wind turbine fatigue loads and generator error could be reduced effectively. With regard to the spar-type wind turbine, Si et al. [
11,
12] established a 5-DOF dynamic model for the Offshore Code Comparison Collaboration (OC3) Hywind spar-type wind turbine, and studied the effectiveness of TMD devices installed in nacelle and platform respectively. Van-Nguyen Dinh et al. [
13] also investigated the effectiveness and feasibility of single and multiple TMD devices on a spar-type FOWT, and claimed that the spar TMD is more effective than the nacelle TMD.
Apparently, TMD devices are effective in vibration and load mitigation for both barge-type and spar-type FOWTs. However, to the authors’ knowledge, no studies have been reported to concern this issue of the semi-submersible foundation FOWTs. Nevertheless, currently, the semi-submersible foundation occupies the largest number of the few installed full-scale FOWT prototypes for its conspicuous capability in supporting the operational conditions of FOWT, such as the 2 MW WindFloat in the offshore of Portugal, and the 2 MW Mirai and 7 MW Shimpuu in the open sea of Japan. Although the structure system of the semi-submersible foundation is more complex than the other two types, it has the lowest pitch and roll motions, which is critical in the normal operation of wind turbines [
14].
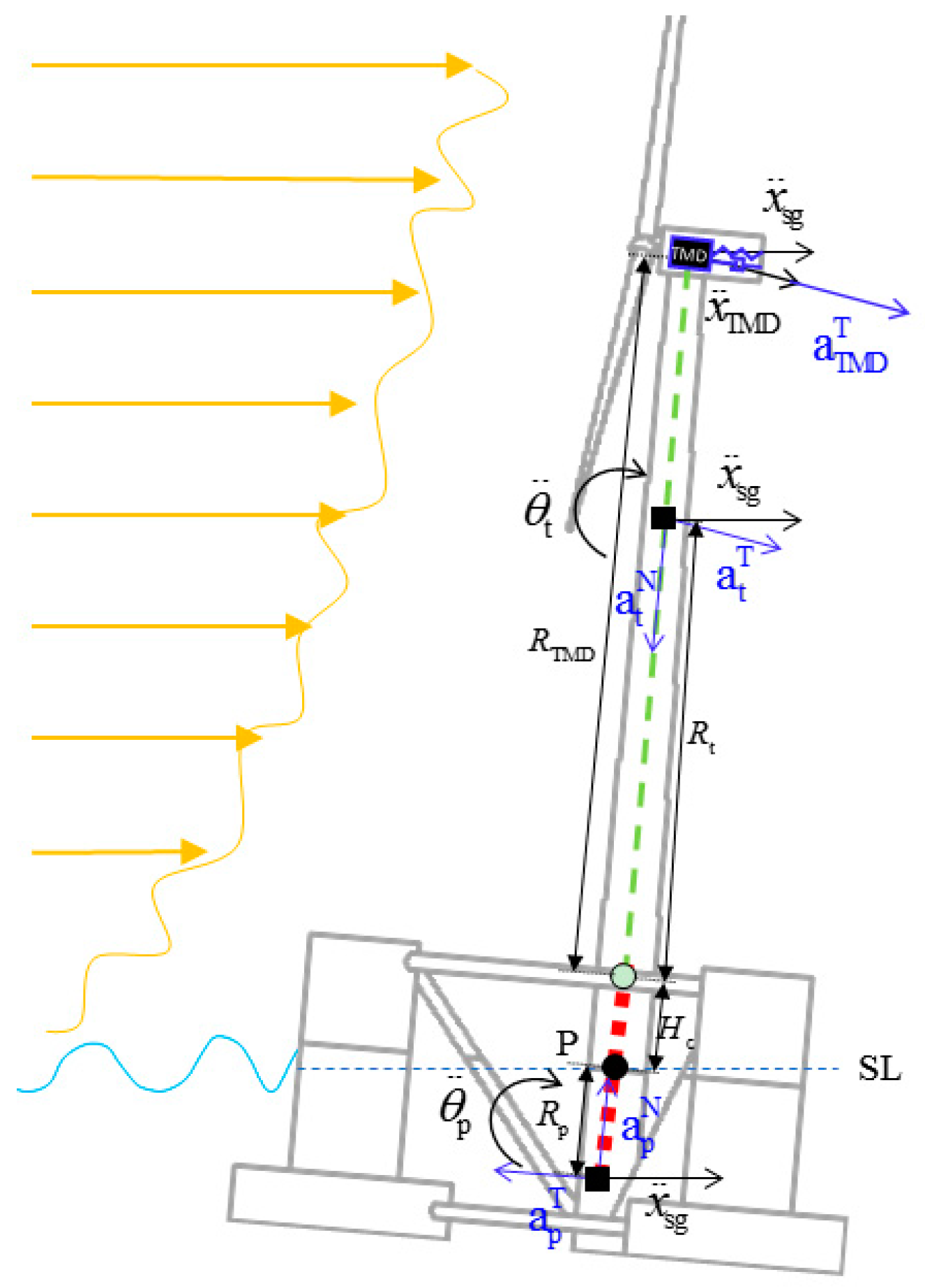
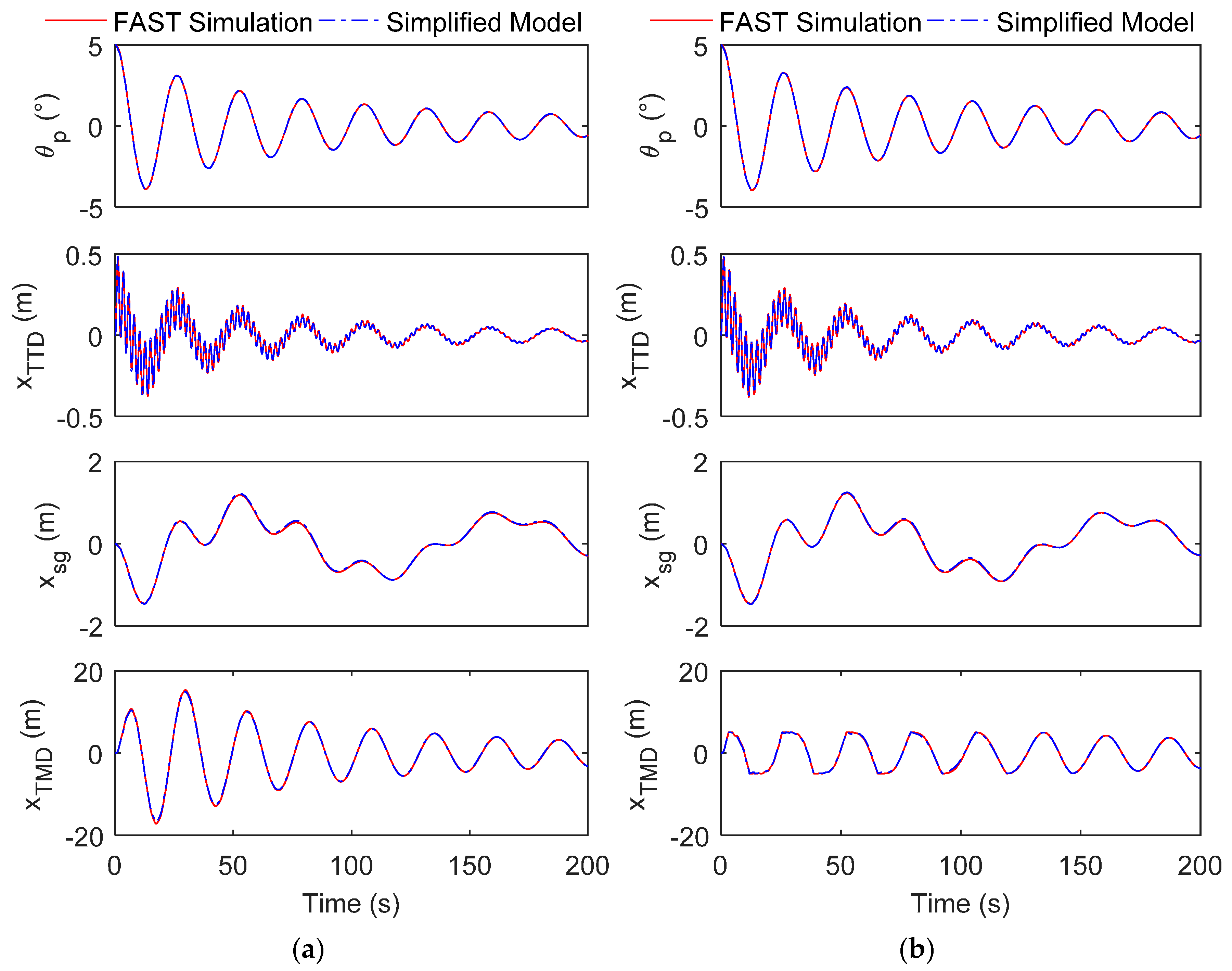
This study aims to investigate the potential application of optimized TMD in the semi-submersible FOWT. According to its particular characteristics, a customized 4-DOF dynamic model was derived based on the D’Alembert’s principle. After identifying the unknown parameters, the simplified model was validated by the recognized FOWT analysis tool FAST [
15]. To find the optimized configurations of TMD, both method of exhaustion and genetic algorithm were employed to avoid local minimum. Finally, the performances of six sets of optimized TMD devices were evaluated via the fully coupled aero-hydro-servo-elastic dynamic model.
4. Performance Verification and Analysis of the Optimized TMDs
Combined results of the above two optimization algorithms, three TMD masses (8000 kg, 10,000 kg and 20,000 kg) with two sets of corresponding parameters (lower and higher stiffness) are chosen for validating the control effects in a realistic offshore environment. The validation is performed in the FAST program, a fully nonlinear simulator of FOWT dynamics and with all system DOFs enabled.
To make a convenient comparison with previous study [
7,
11], the same environmental load conditions are adopted in this study and listed in
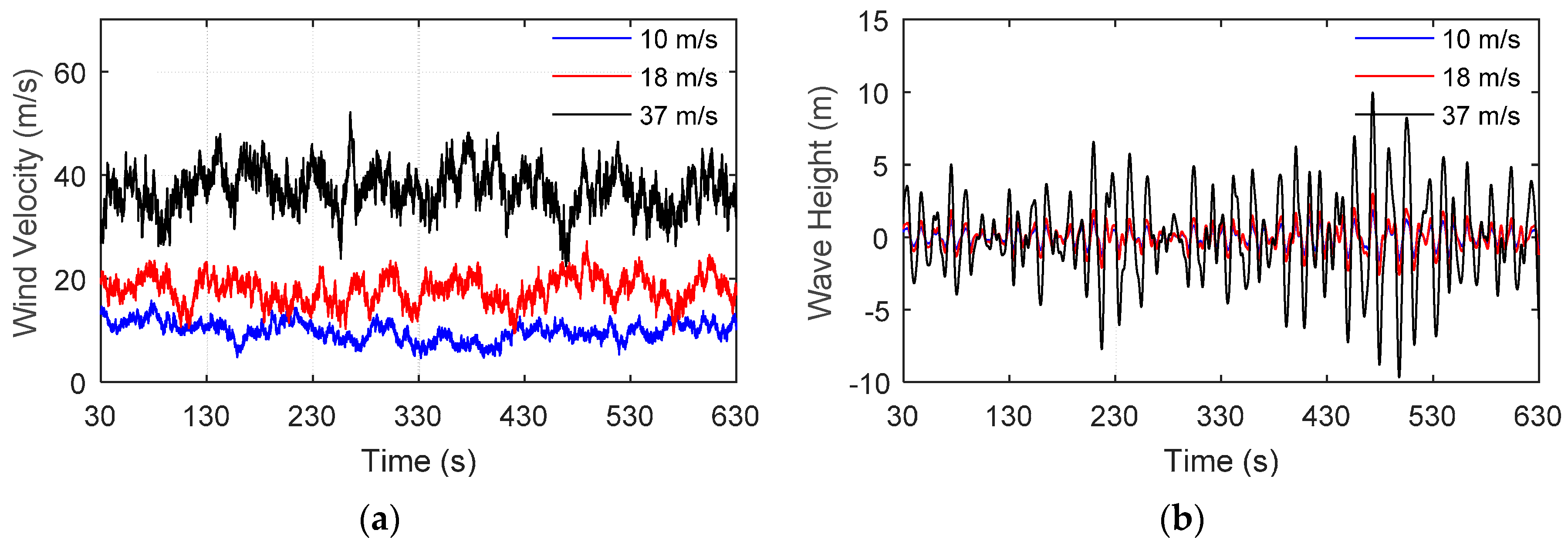
Table 6. The three selected conditions approximately correspond to the rated operation, maximum-wind operation and self-survival. The Kaimal and JONSWAP spectrum are used in the generation of stochastic wind and wave field respectively. Under each load condition, the total simulation time is 630 s and only the last 600 s are recorded for analysis. The time step for all the cases is 0.05 s, which is small enough to obtain an independent solution. To eliminate the influence of random seed, the final statistical results are averaged based on three sets of stochastic environment field for each case.
The wind and wave time-history samples for the three selected cases are plotted in
Figure 7. Obviously, the generated environmental loads essentially captured the predefined characteristics in
Table 6.
Similar to [
12,
27], to evaluate the performance of TMD controllers, the 95th percentile of response is employed to represent the extreme value, and the short-term damage equivalent load (DEL) [
28] is used to measure the fatigue loads. Response reduction ratios
with different TMD parameters are shown in
Table 7. As defined in Equation (19), a positive reduction ratio indicates that the TMD device has a mitigation effect on the response of turbine system, and vice versa.
Since the TMD parameters are obtained by minimizing the standard deviation of tower top displacements in the pitch free decay motion, the low stiffness TMD devices mitigate
by dissipating the energy in the platform pitch motion, whereas the high stiffness TMD devices dissipate the energy in the tower oscillation. However, in the real environment, the frequencies of platform pitch motion are mainly controlled by the incoming wave spectrum. The peak-spectral period of incident waves listed in
Table 6 is 14 s for operating conditions, which is greatly less than the pitch natural period of OC4-DeepCwind 26.8 s [
29]. On the other side, the natural frequency of turbine tower is much higher and its oscillations are mostly excited by the wide-band wind spectrum. As can be seen in
Table 7, almost all the reduction ratios of high stiffness TMD is larger than the low stiffness TMD, regardless of whether considering the extreme or fatigue index or not. Furthermore, lower stiffness of TMD will frequently collide on the stop walls, which may increase the cost of maintenance. Therefore, the low stiffness TMD is not recommended for FOWTs.
With regard to the platform pitch and roll motion, the controlling performance of TMD is negative for most cases. The absolute values of reduction ratio are relatively small and increasing with the increment of TMD mass. This phenomenon can be explained by the mass ratio and location of TMD. Firstly, the mass ratio of TMD (20,000 kg) to the whole system is 0.14% which is significantly small than the empirical value in building structure control. However, the mass ratio of TMD (20,000 kg) to the 5 MW turbine is 3.33%. Thus, it is not surprising that the TMD devices in this work have negligible effects on the platform motion. Secondly, as the turbine inclines, the gravity of TMD device installed in the nacelle will deteriorate the system tilt.
The DEL of tower base moment in the fore–aft and side–side directions represents the fatigue loads. Under the two operating conditions (10 m/s and 180 m/s), TMD is capable of mitigating the DELs substantially. With the increase of TMD mass, the control effects also improved gradually. Compared with side–side, the reduction ratio of fore–aft direction is lower. Nevertheless, the absolute moments in the fore–aft direction are several times larger than the side–side. Similar as standard deviation, the short-term DEL of a time-series can reflect, in some extent, the level of fluctuations departing from the mean value. Therefore, because is the objective function in optimizing the TMD parameters, it is well reasoned that the DELs can be reduced. As a whole, the main embodiment of TMD device in OC4-DeepCwind is to absorb the energy and mitigate the fatigue loads induced by moderate wind and wave conditions.
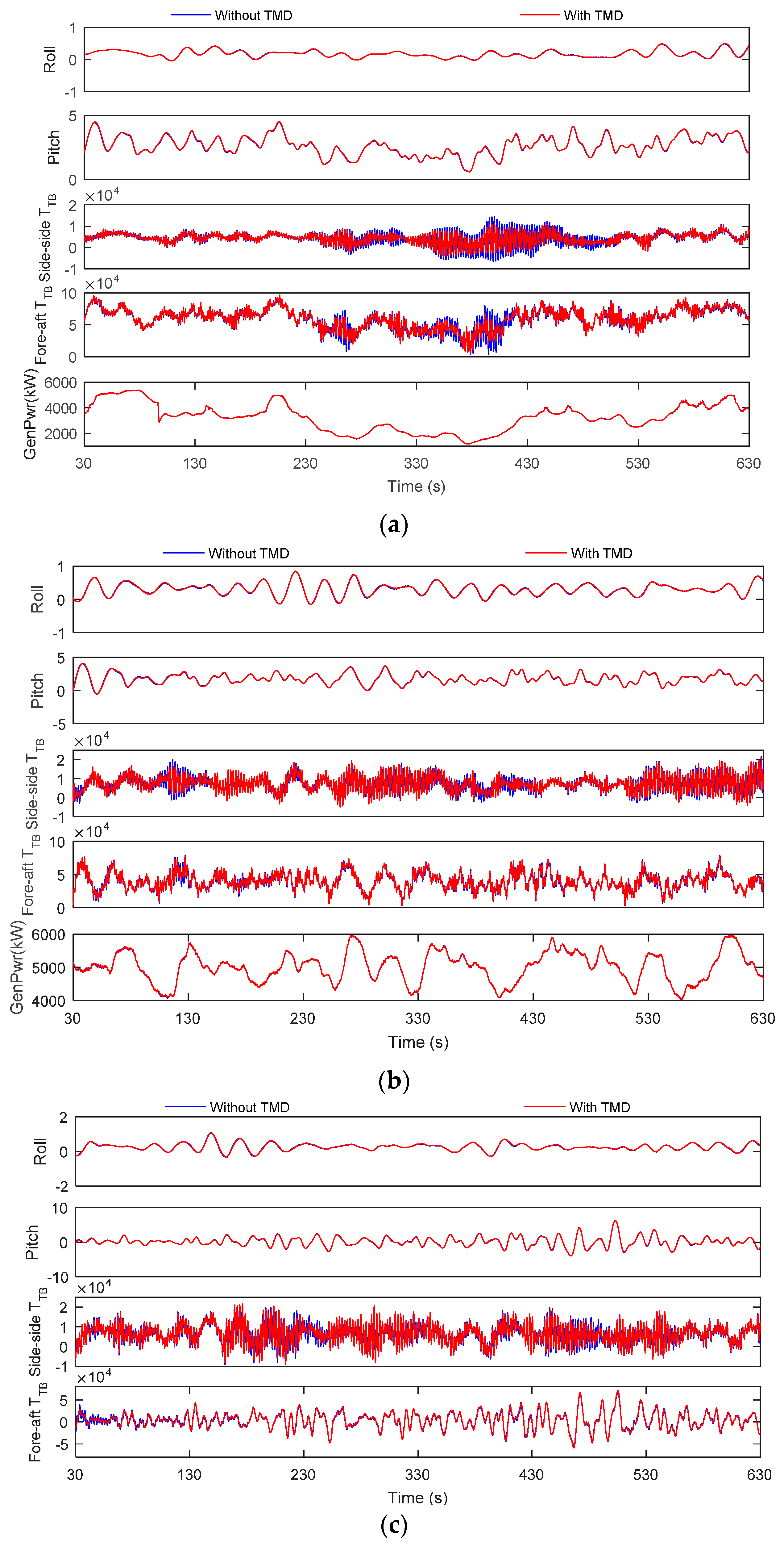
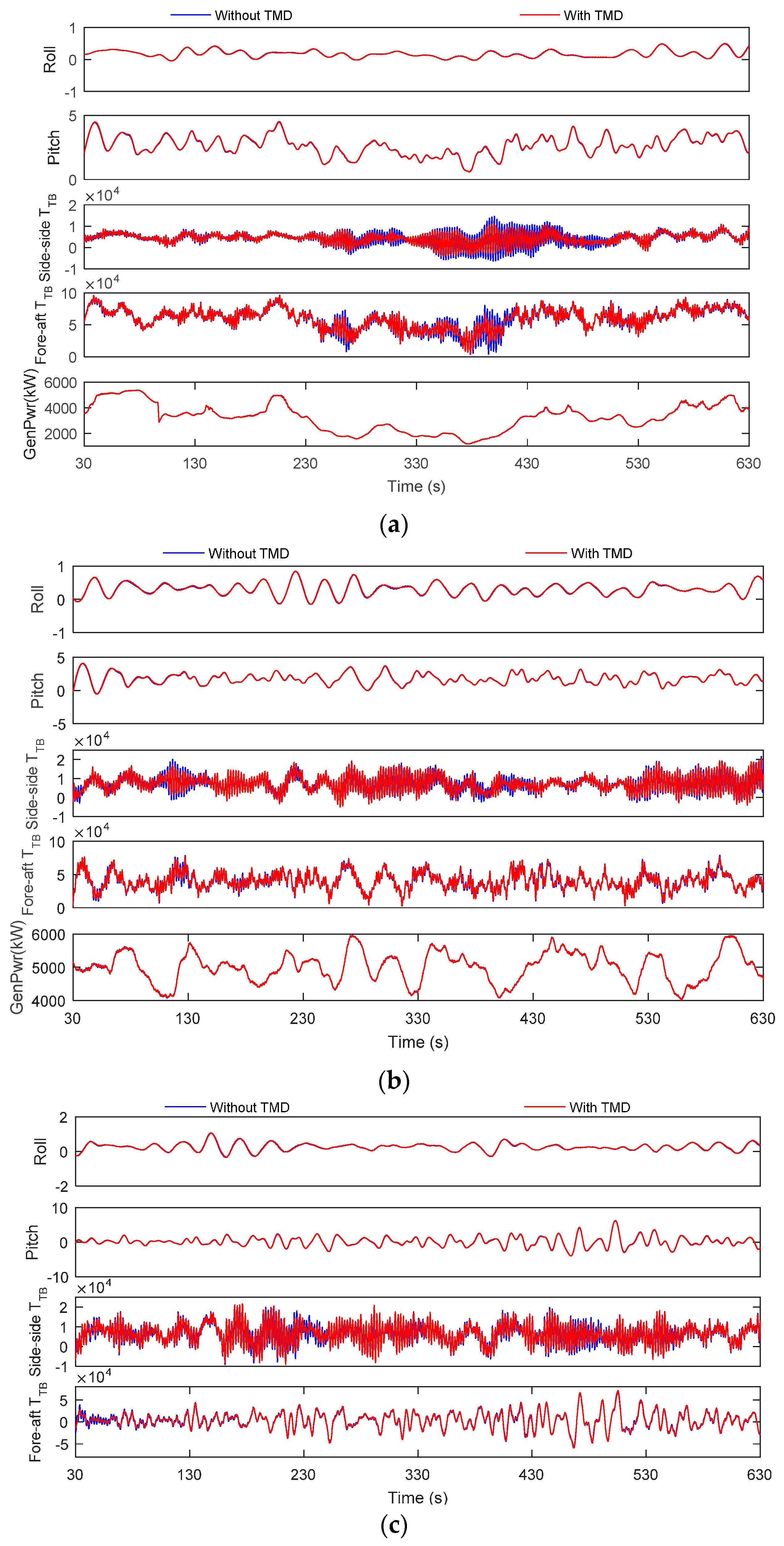
According to the above discussion, TMD devices with 20,000 kg mass, 133,467 N/m spring coefficient and 9293 N/(m/s) damping coefficient are chosen for OC4-DeepCwind in practical application. The time-histories of platform pitch and roll and the tower base moments
in the fore–aft and side–side directions are illustrated in
Figure 8. The responses with and without TMD under the three load conditions are drawn in red and blue lines, respectively. The time domain results also verify the statistics. The platform motions nearly coincide with each other and the controlling performance can be observed in the tower base moments. Similar to the results of Si et al. [
12], the generated power time-histories of the 5 MW FOWT under 10 m/s and 18 m/s wind velocities indicate that the TMD devices have negligible interference on the electricity generation.
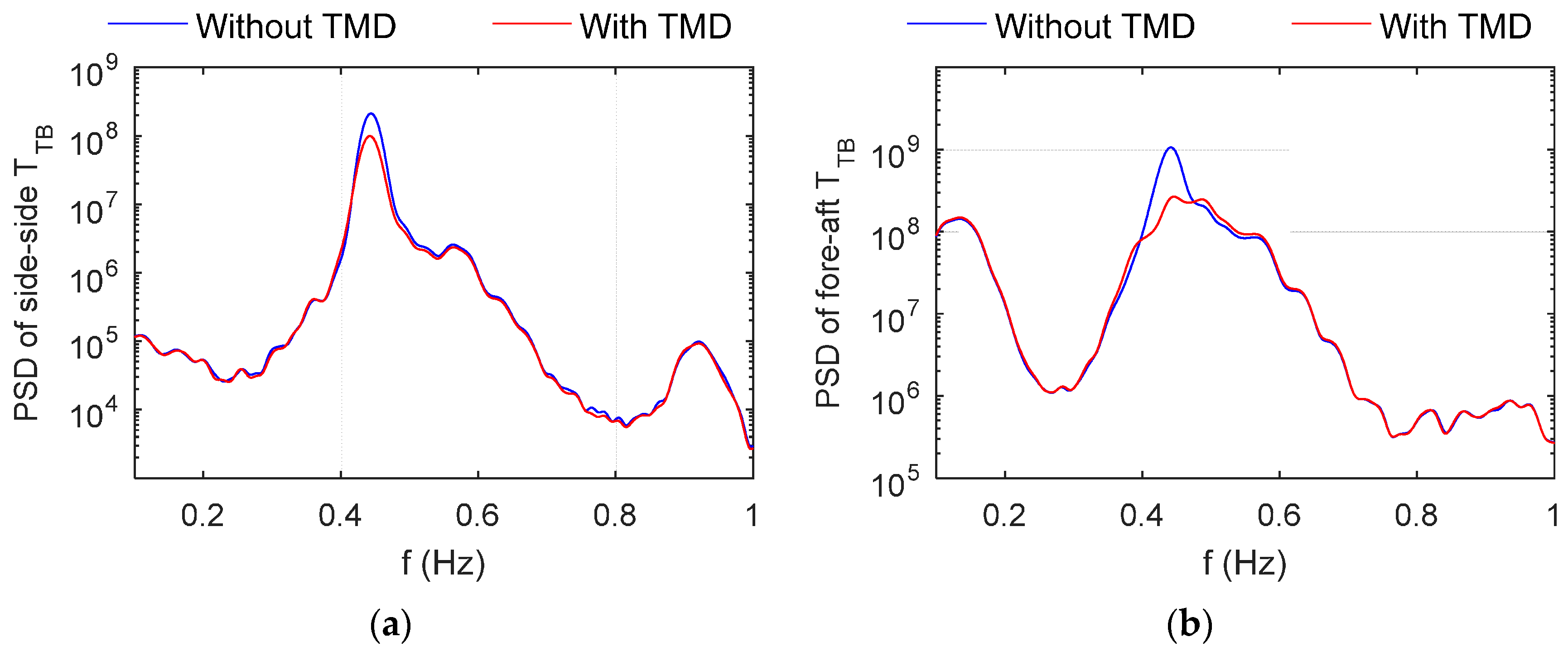
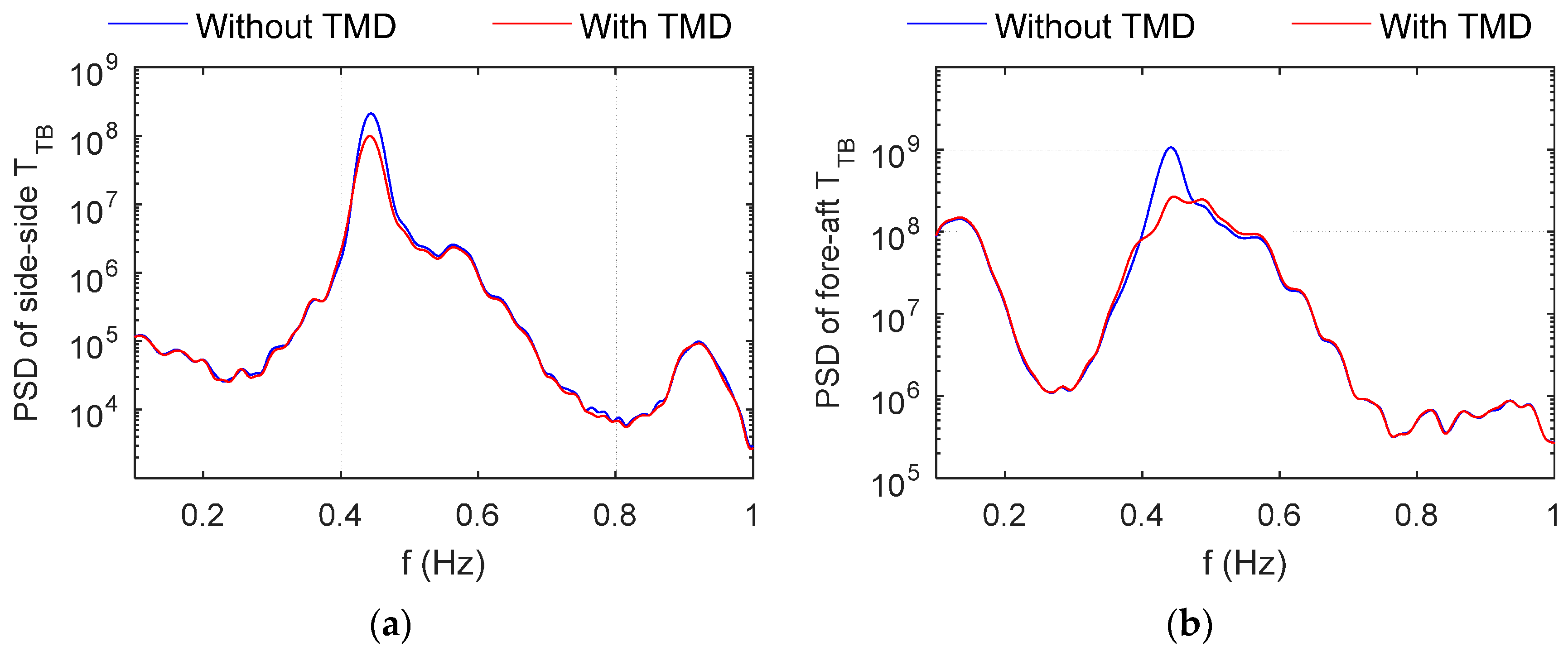
As can be seen in
Figure 9, the comparison between the power spectral density of uncontrolled responses and responses controlled by the selected TMD device displays the alleviating effects in frequency domain. Since the TMD is tuned near the wind turbine’s fore–aft natural frequency
≈ 0.43 Hz, the control is generally most effective for tower base moment, which is critical in extending the service life of FOWT.
In addition, to reveal the performance of TMD device on different kinds of floating foundations, the simulation results of OC3-Hywind, a spar type 5 MW FOWT, using the same environmental conditions from [
11] are listed in
Figure 9. Power spectral density of tower base moments under rated operation condition with and without TMD: (a) Side–side; and (b) Fore–aft.
Table 8 to compare with the semi-submersible OC4-DeepCwind. The TMD device is also installed in the nacelle with
= 20,000 kg,
= 16,4231 N/m,
= 20,889 N/(m/s), which is similar to the 20,000 kg high stiffness TMD in this work. One of the noteworthy differences between spar and semi-submersible platform is their hydrostatic stiffness of pitch; in other words, the small angle stability of spar is worse than the semi-submersible. Encountering the same realistic loads, the pitch response of OC3-Hywind is supposed to be larger than OC4-DeepCwind. However, the response reduction ratios of the two type foundations manifest a similar variation tendency. For DEL of
at rated and extreme wind speed, the control effects of TMD on OC4-DeepCwind are better than OC3-Hywind. At maximum operating wind speed, TMD on OC3-Hywind can mitigate more fatigue loads.
5. Conclusions
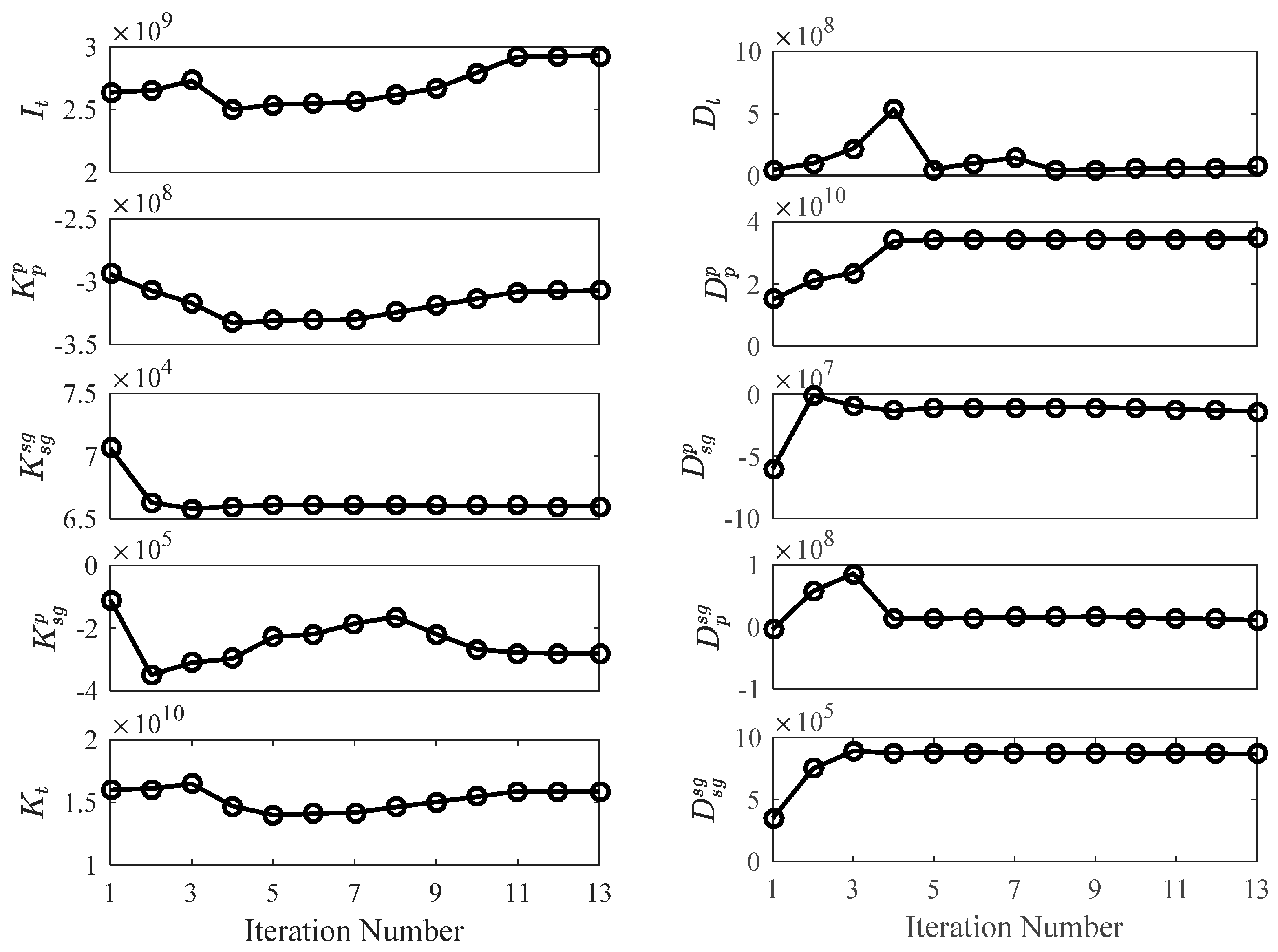
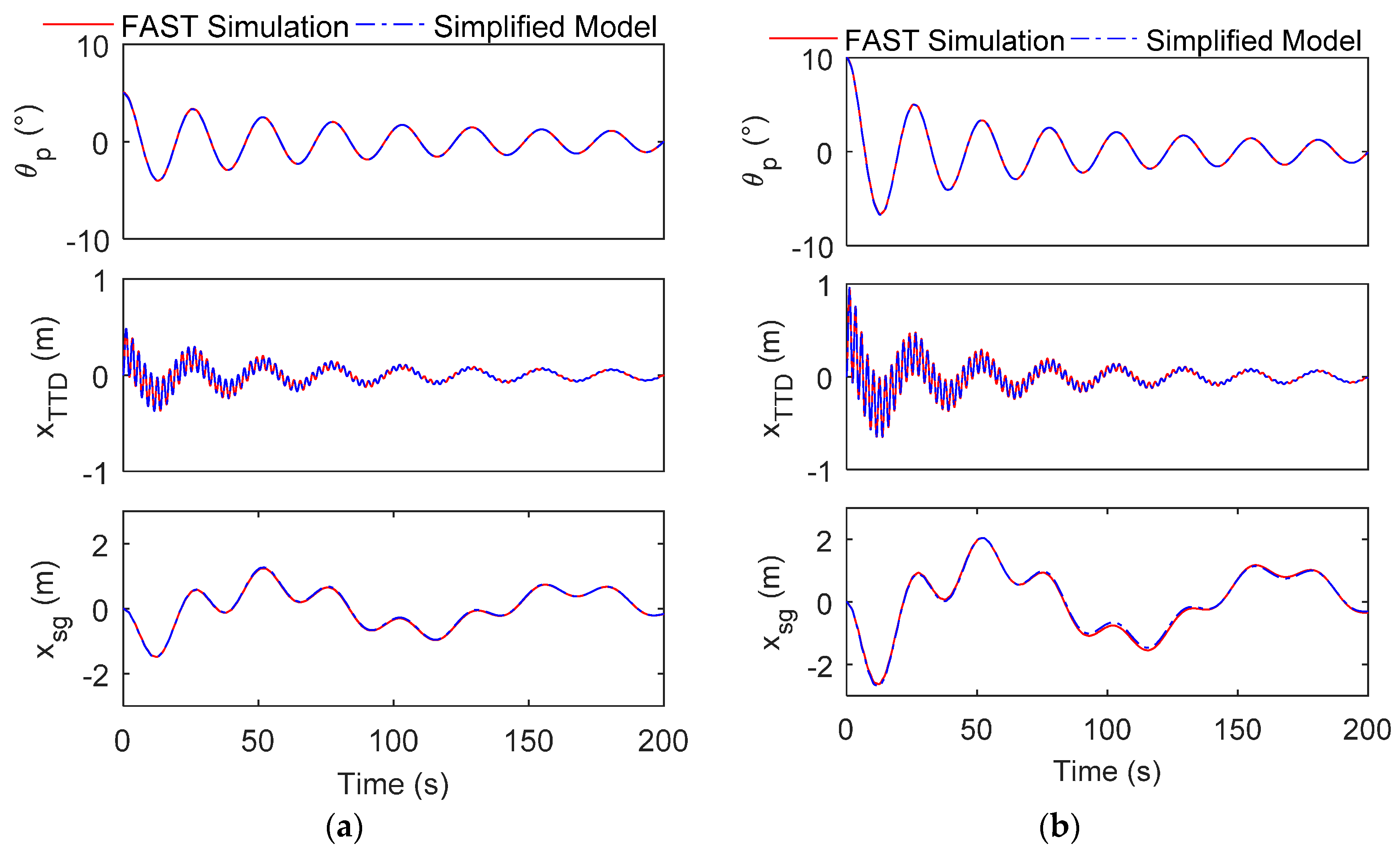
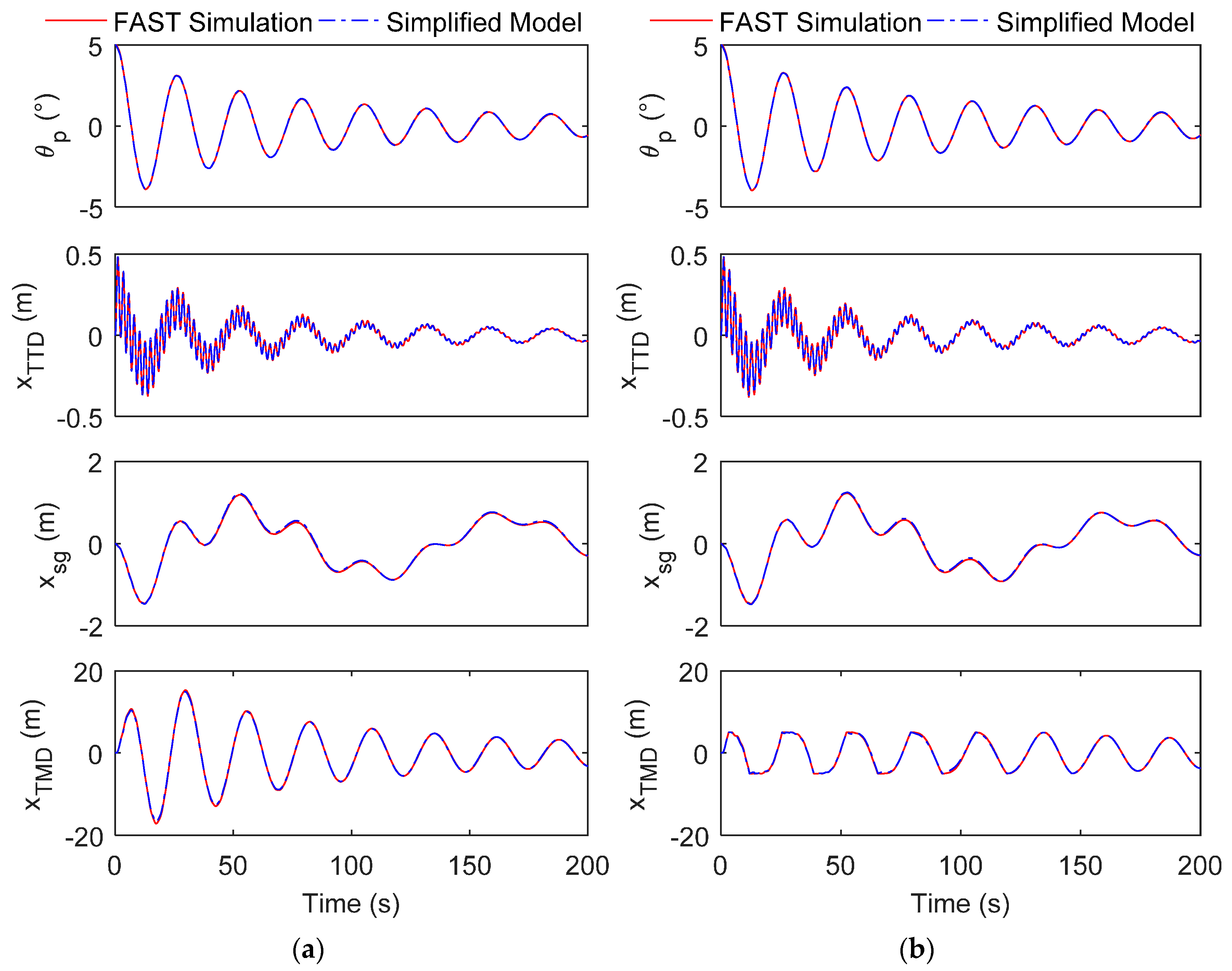
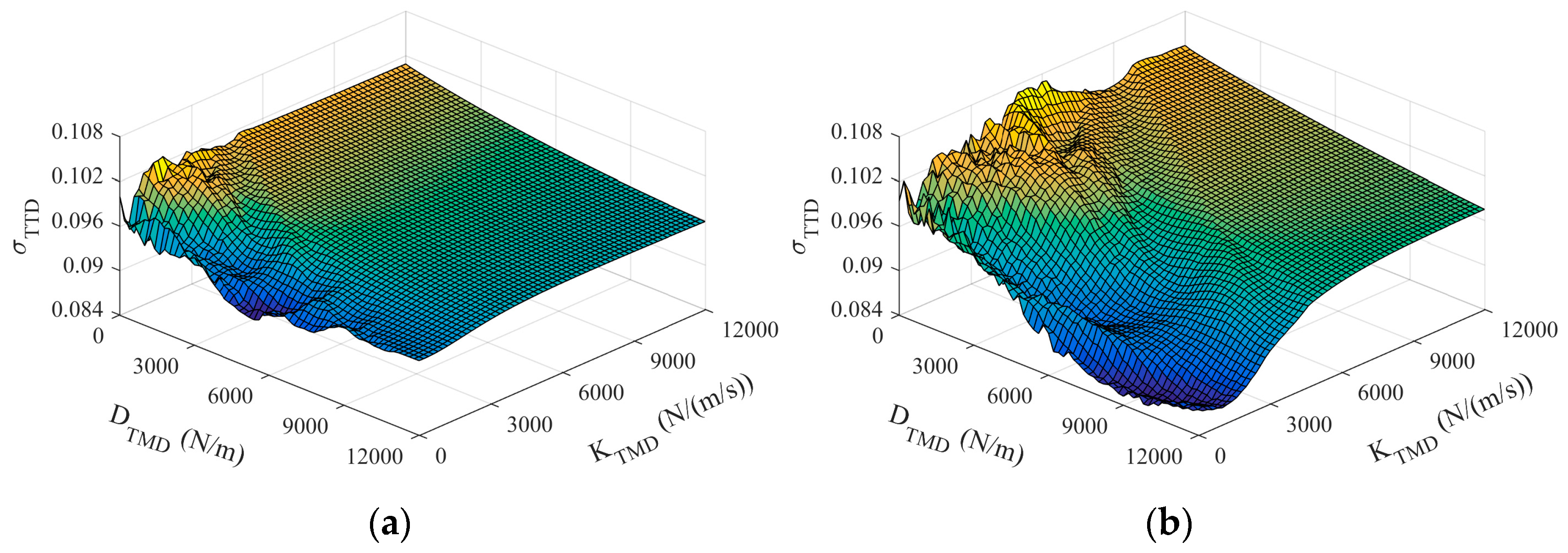
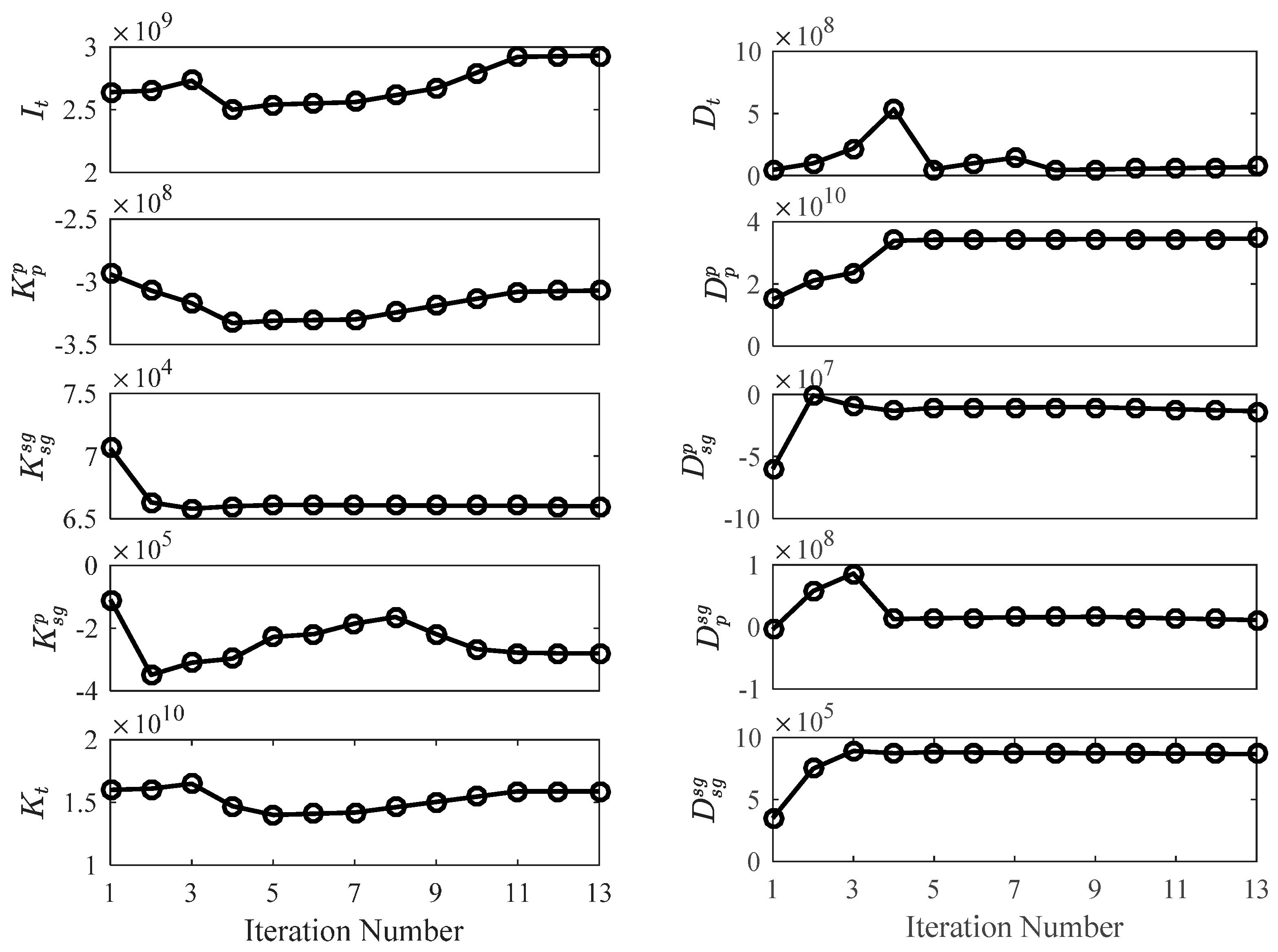
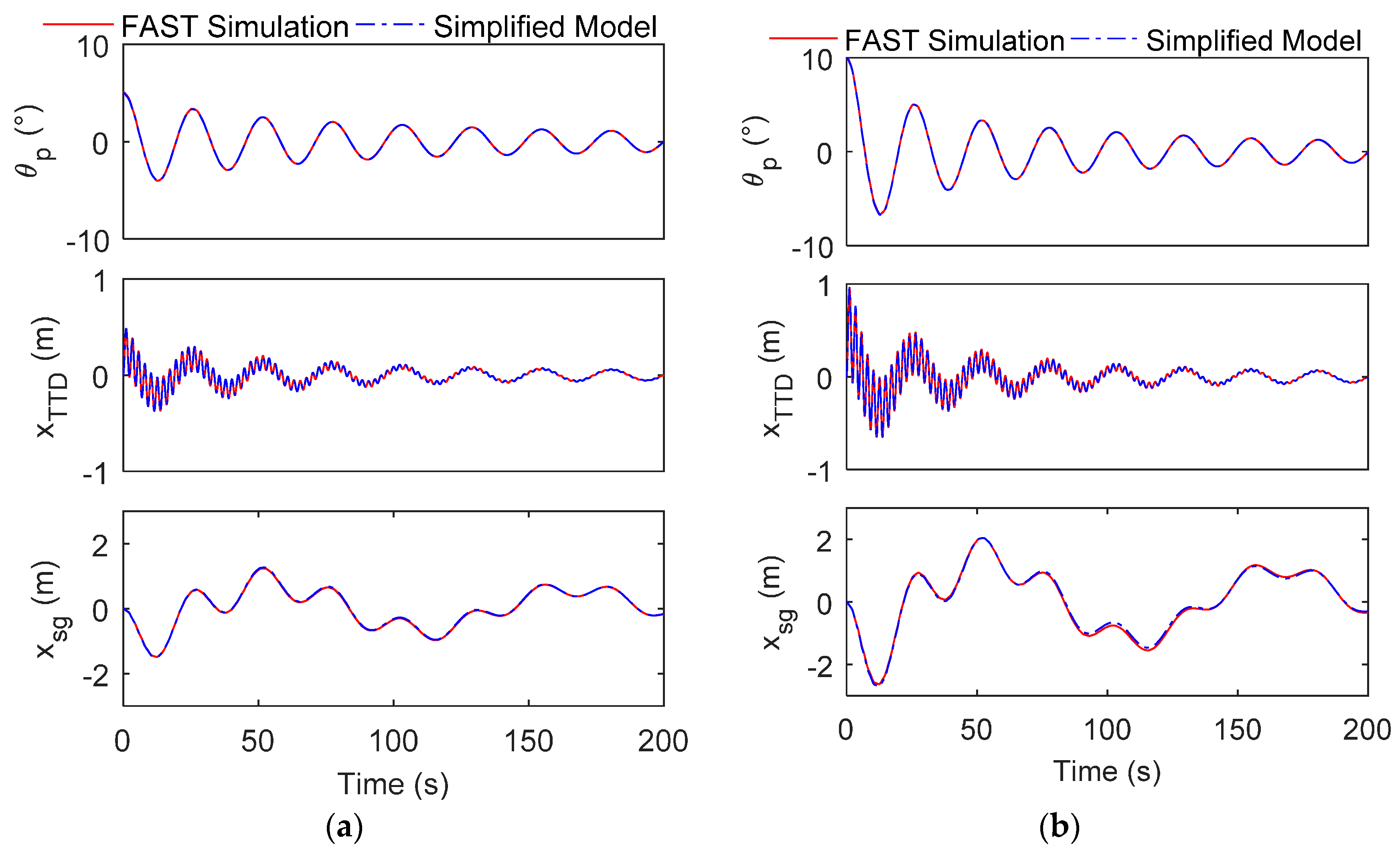
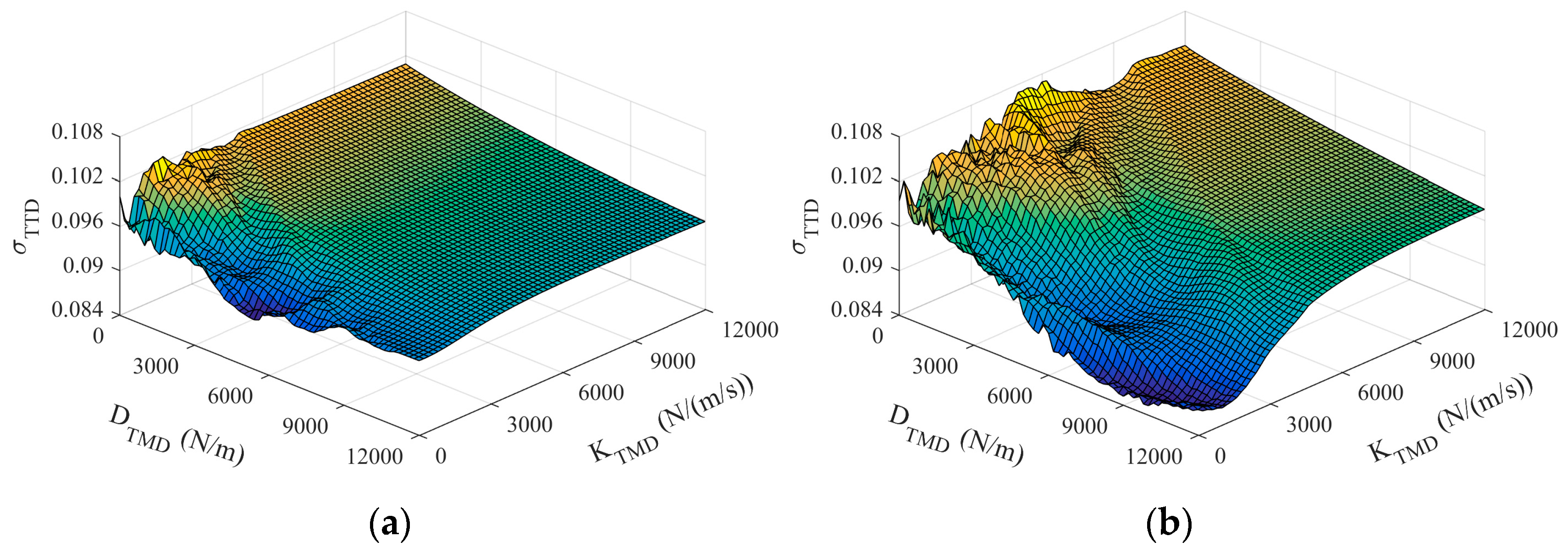
To find the optimal tuned mass damper (TMD) for the semi-submersible OC4-DeepCwind wind turbine efficiently, we propose a simplified multi-rigid-body dynamic model, in which only the motion of platform pitch and surge, tower tilt and TMD translation are considered. The inertia and gravity forces, restoring and damping forces from hydrodynamics and mooring, and the TMD forces are included in the dynamic model derivation. After the ten unknown parameters are identified by the Levenberg–Marquardt algorithm, the accuracy of the simplified model is verified by the pitch free decay motions. In order to obtain the globally optimized parameters of TMDs, the primary variations of objective function can be predicted firstly by method of exhaustion and a set of optimal parameters are determined in this complex lower stiffness region. Furthermore, genetic algorithm is helpful in finding the optimal stiffness in the higher range efficiently.
According to the performance in realistic environmental conditions, the lower stiffness TMDs mainly dissipate the energy of platform pitch vibration, whereas the higher stiffness TMDs absorb the energy of tower vibration. However, the periods of platform pitch motion are mostly determined by the incoming wave spectrum. Consequently, the high stiffness TMDs that exhibit a more stable performance are recommended for practical use. Of all the three environmental conditions, TMD is certainly helpful to reduce the fatigue loads, but may slightly harm the extreme loads (95th percentile). Compared with spar-type floating wind turbines, the response reduction ratios show that the application of TMD device on semi-submersible floating wind turbines is equally promising.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}