A Novel One-Camera-Five-Mirror Three-Dimensional Imaging Method for Reconstructing the Cavitation Bubble Cluster in a Water Hydraulic Valve


Abstract
:1. Introduction
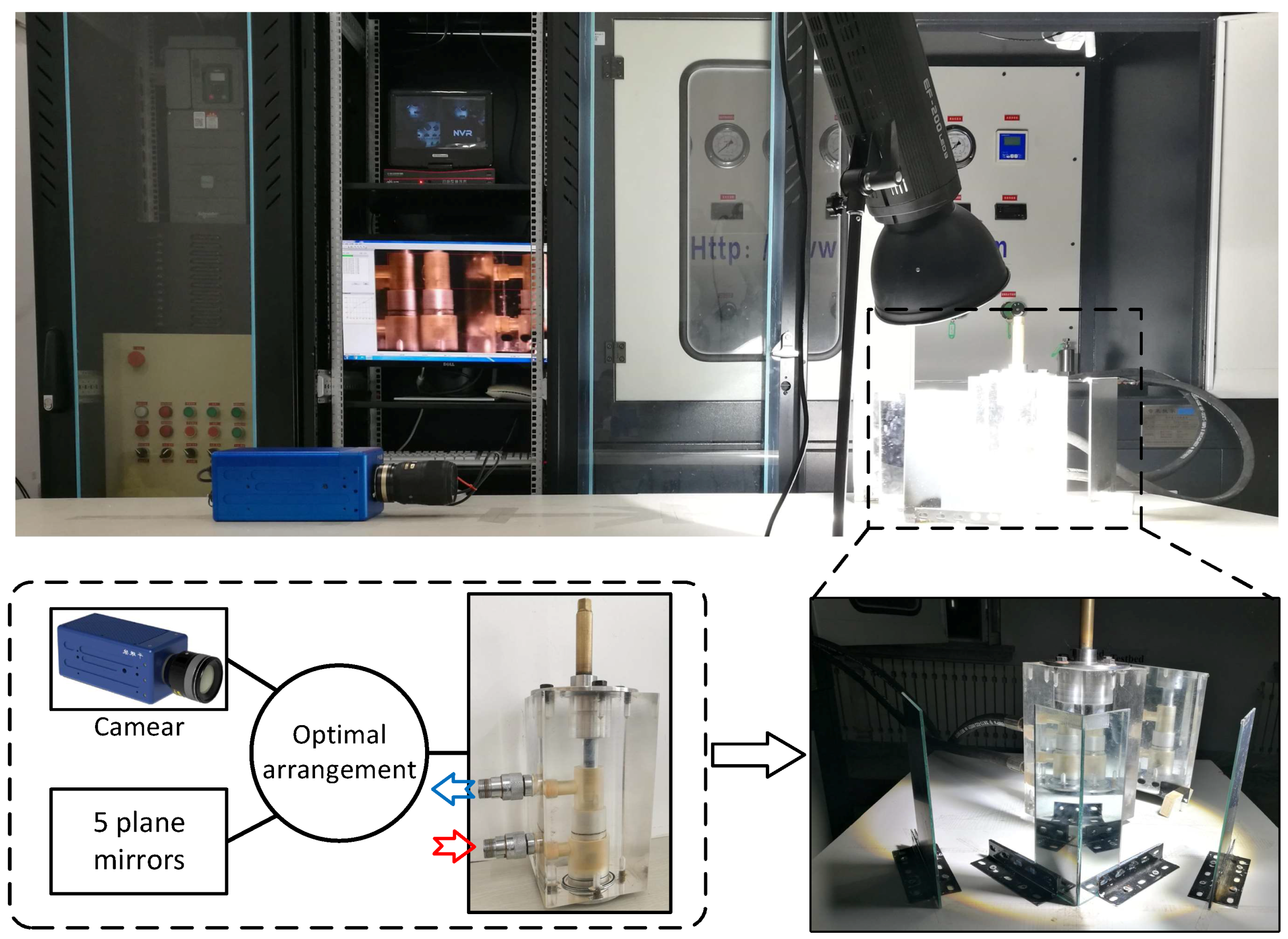
2. Overall Structure of the 3D Imaging Experiment System
2.1. Measurement Principle of the 3D Imaging
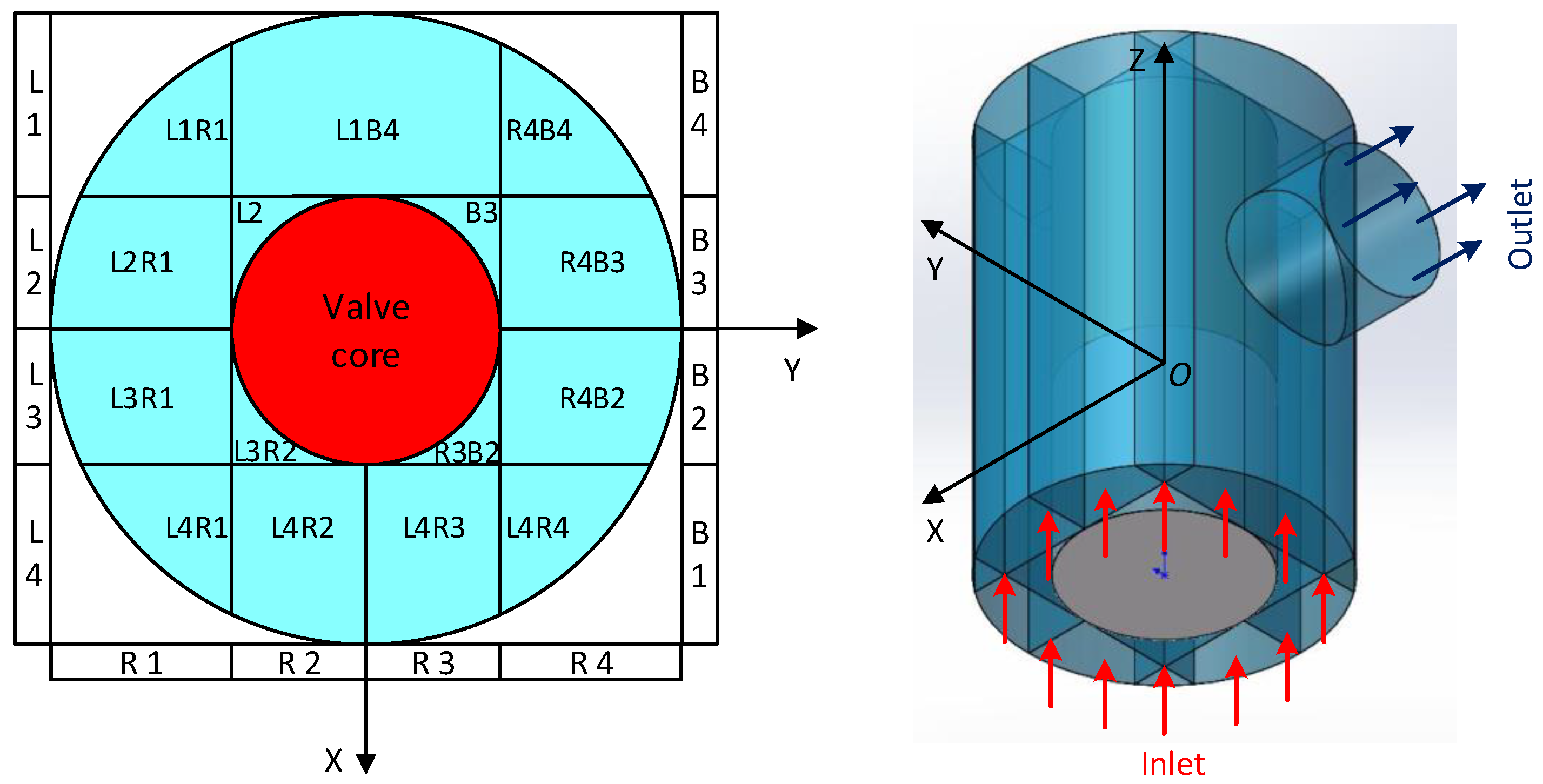
2.2. Transparent Throttle Valve
3. Optimization Arrangement of the One-Camera-Five-Mirror Module
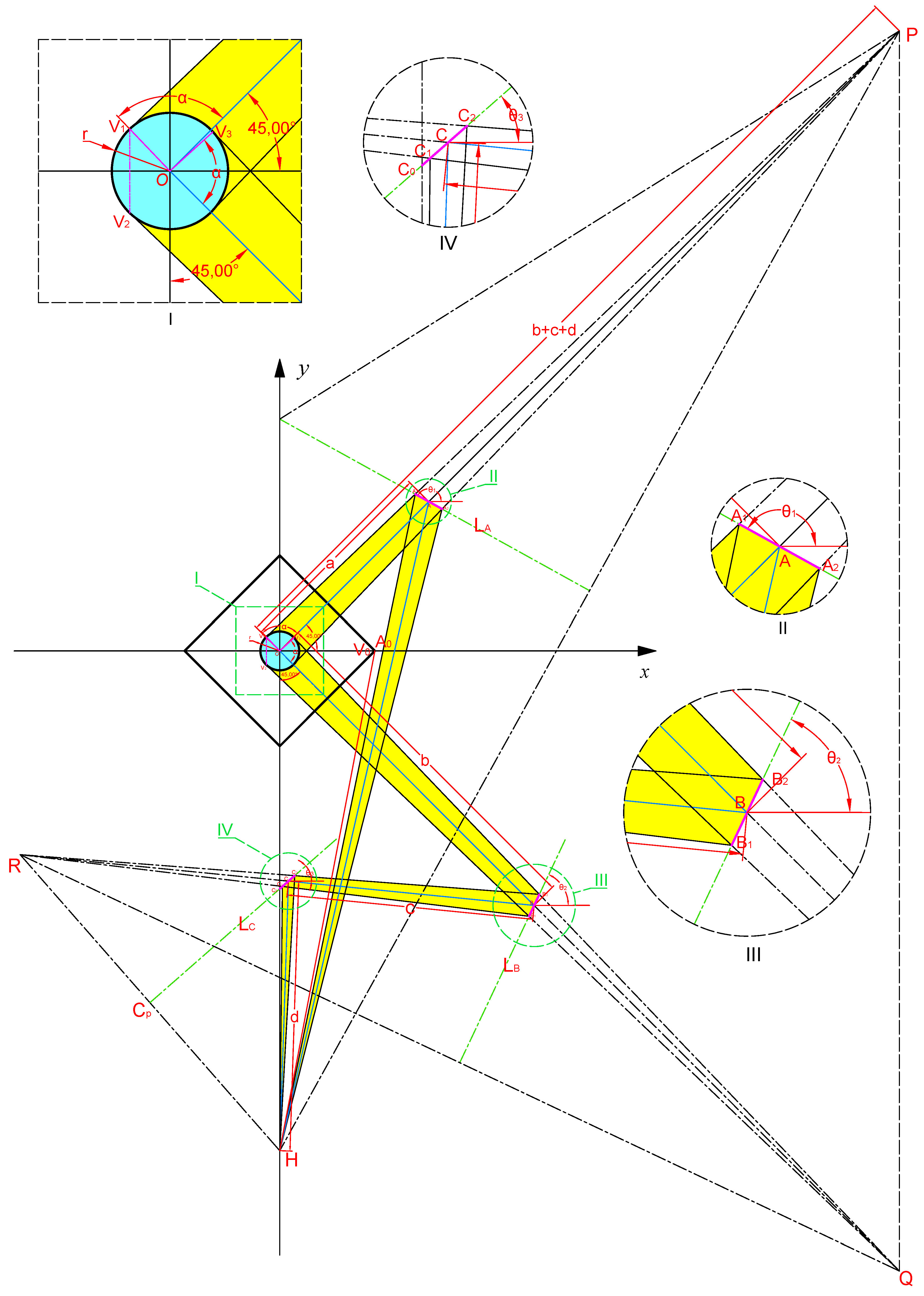
3.1. Optimization Model
3.2. Optimization Variables
3.3. Optimization Solution
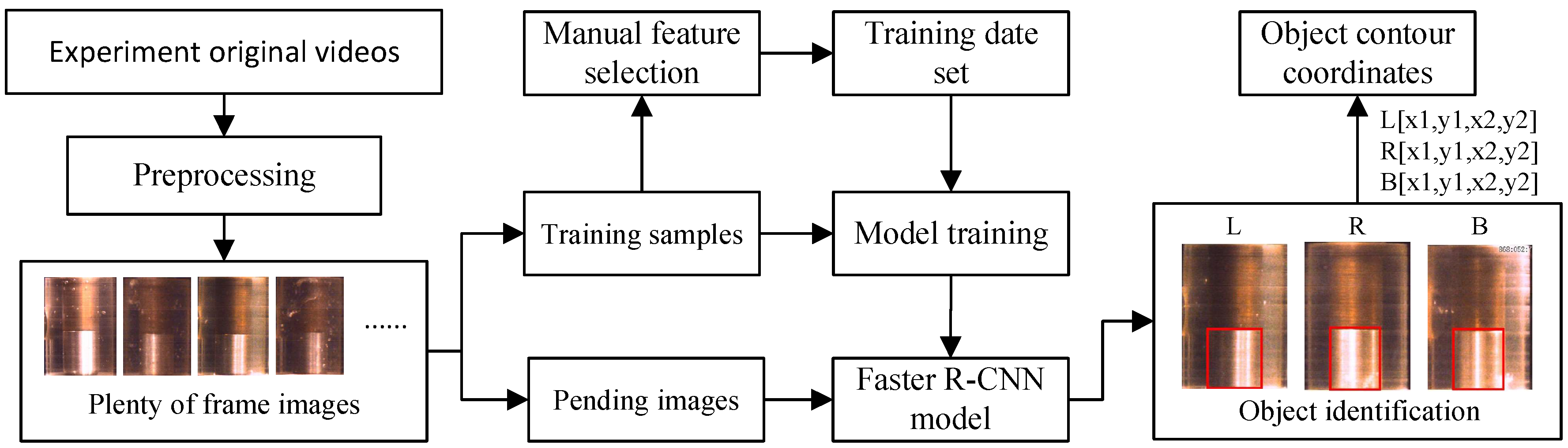
4. Algorithm Development
4.1. 2D Bubble Feature Detection
4.2. Feature Identification of the Opaque Object
4.3. 3D Bubble Cluster Reconstruction
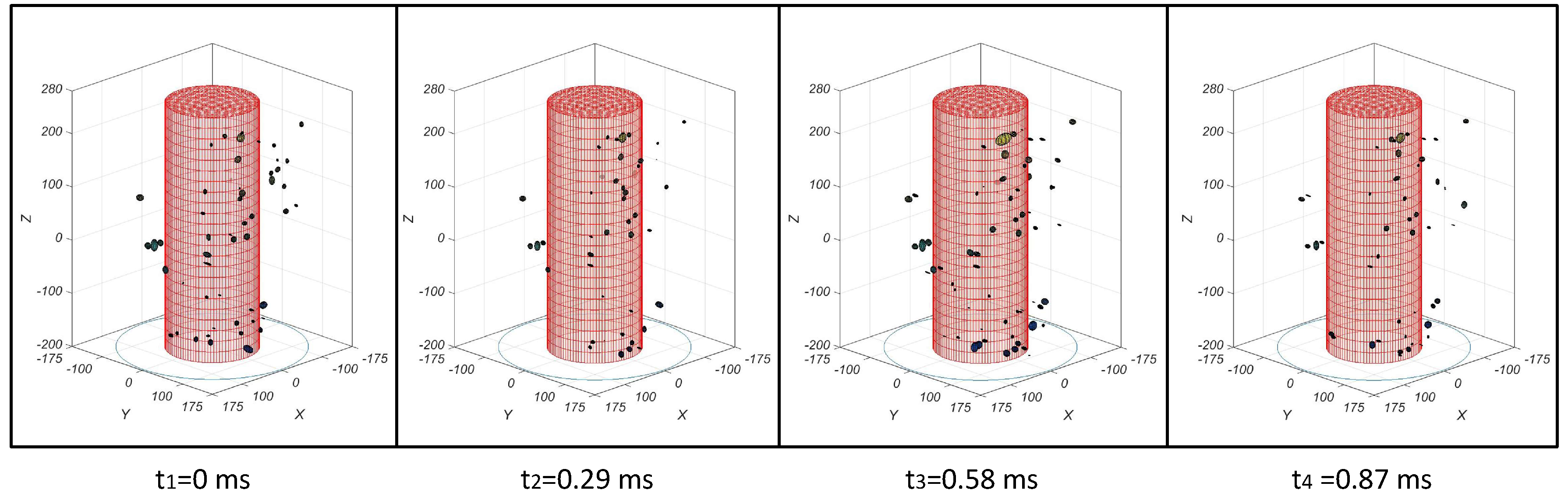
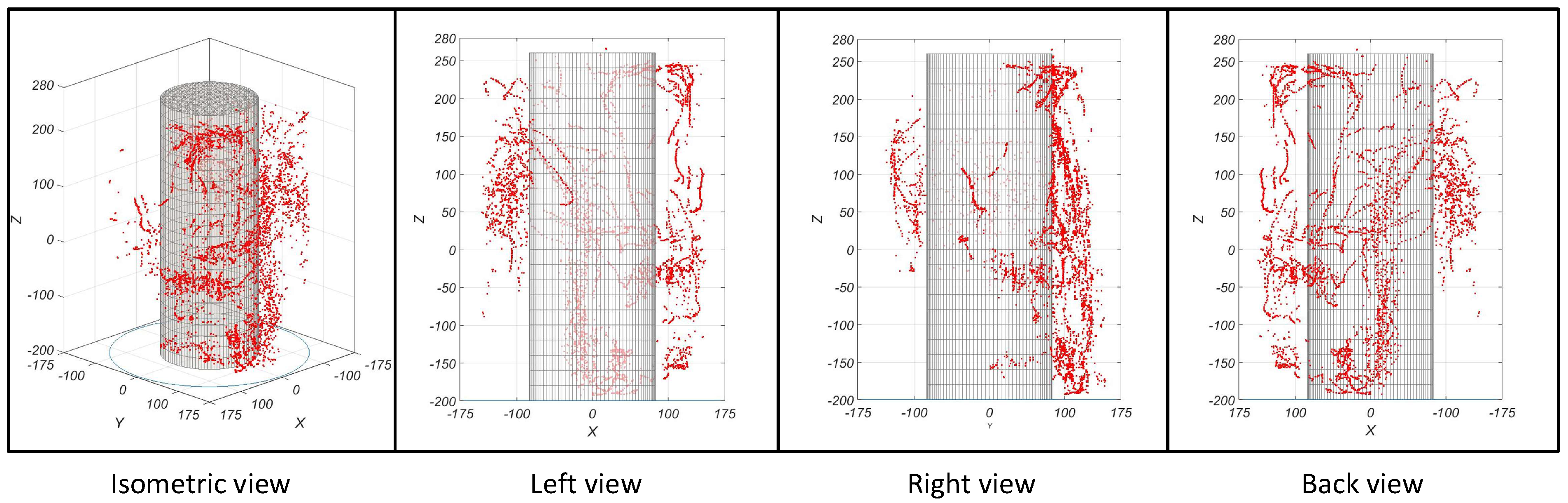
5. Results and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Belden, J.; Ravela, S.; Truscott, T.T.; Techet, A.H. Three-dimensional bubble field resolution using synthetic aperture imaging: Application to a plunging jet. Exp. Fluids 2012, 53, 839–861. [Google Scholar] [CrossRef]
- Ahmed, F.S.; Sensenich, B.A.; Gheni, S.A.; Znerdstrovic, D.; Al Dahhan, M.H. Bubble dynamics in 2D bubble column: Comparison between high-speed camera imaging analysis and 4-point optical probe. Chem. Eng. Commun. 2015, 202, 85–95. [Google Scholar] [CrossRef]
- Lau, Y.M.; Deen, N.G.; Kuipers, J.A.M. Development of an image measurement technique for size distribution in dense bubbly flows. Chem. Eng. Sci. 2013, 94, 20–29. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, M.; Xu, Y.; Tang, C. Three-dimensional volume of fluid simulations on bubble formation and dynamics in bubble columns. Chem. Eng. Sci. 2012, 73, 55–78. [Google Scholar] [CrossRef]
- Tayler, A.B.; Holland, D.J.; Sederman, A.J.; Gladden, L.F. Applications of ultra-fast MRI to high voidage bubbly flow: Measurement of bubble size distributions, interfacial area and hydrodynamics. Chem. Eng. Sci. 2012, 71, 468–483. [Google Scholar] [CrossRef]
- Zhao, L.; Sun, L.; Mo, Z.; Tang, J.; Hu, L.; Bao, J. An investigation on bubble motion in liquid flowing through a rectangular Venturi channel. Exp. Therm. Fluid Sci. 2018, 97, 48–58. [Google Scholar] [CrossRef]
- Xia, G.; Cai, B.; Cheng, L.; Wang, Z.; Jia, Y. Experimental study and modelling of average void fraction of gas-liquid two-phase flow in a helically coiled rectangular channel. Exp. Therm. Fluid Sci. 2018, 94, 9–22. [Google Scholar] [CrossRef]
- Fu, Y.; Liu, Y. Development of a robust image processing technique for bubbly flow measurement in a narrow rectangular channel. Int. J. Multiphase Flow 2016, 84, 217–228. [Google Scholar] [CrossRef]
- Lomakin, V.O.; Kuleshova, M.S.; Kraeva, E.A. Fluid Flow in the Throttle Channel in the Presence of Cavitation. Procedia Eng. 2015, 106, 27–35. [Google Scholar] [CrossRef]
- Gavaises, M.; Villa, F.; Koukouvinis, P.; Marengo, M.; Franc, J.P. Visualisation and les simulation of cavitation cloud formation and collapse in an axisymmetric geometry. Int. J. Multiphase Flow 2015, 68, 14–26. [Google Scholar] [CrossRef]
- Kravtsova, A.Y.; Markovich, D.M.; Pervunin, K.S.; Timoshevskiy, M.V.; Hanjalić, K. High-speed visualization and PIV measurements of cavitating flows around a semi-circular leading-edge flat plate and NACA0015 hydrofoil. Int. J. Multiphase Flow 2014, 60, 119–134. [Google Scholar] [CrossRef]
- Singhal, A.K.; Athavale, M.M.; Li, H.; Jiang, Y. Mathematical Basis and Validation of the Full Cavitation Model. J. Fluids Eng. 2002, 124, 617–624. [Google Scholar] [CrossRef]
- Guevara-Lopez, E.; Sanjuan-Galindo, R.; Cordova-Aguilar, M.S.; Corkidi, G.; Ascanio, G.; Galindo, E. High-speed visualization of multiphase dispersions in a mixing tank. Chem. Eng. Res. Des. 2008, 86, 1382–1387. [Google Scholar] [CrossRef]
- Tan, D.; Mi, J. High speed imaging study of the dynamics of ultrasonic bubbles at a liquid-solid interface. In Materials Science Forum, Proceedings of the 6th International Light Metals Technology Conference (LMT 2013), Old Windsor, UK, 24–26 July 2013; Trans Tech Publications Ltd.: Zürich, Switzerland, 2013; Volume 765, pp. 230–234. [Google Scholar] [CrossRef]
- Jacobson, B.O.; Hamrock, B.J. High-speed motion picture camera experiments of cavitation in dynamically loaded journal bearings. J. Lubr. Technol. 1983, 105, 446–452. [Google Scholar] [CrossRef]
- Dencks, S.; Ackermann, D.; Schmitz, G. Evaluation of bubble tracking algorithms for super-resolution imaging of microvessels. In Proceedings of the 2016 IEEE International Ultrasonics Symposium (IUS), Tours, France, 18–21 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Lauterborn, W.; Hentschel, W. Cavitation bubble dynamics studied by high speed photography and holography: Part one. Ultrasonics 1985, 23, 260–268. [Google Scholar] [CrossRef]
- Lauterborn, W.; Hentschel, W. Cavitation bubble dynamics studied by high speed photography and holography: Part two. Ultrasonics 1986, 24, 59–65. [Google Scholar] [CrossRef]
- Kent, J.C.; Eaton, A.R. Stereo photography of neutral density He-filled bubbles for 3D fluid motion studies in an engine cylinder. Appl. Opt. 1982, 21, 904–912. [Google Scholar] [CrossRef] [PubMed]
- Racca, R.G.; Dewey, J.M. A method for automatic particle tracking in a three-dimensional flow field. Exp. Fluids 1988, 6, 25–32. [Google Scholar] [CrossRef]
- Xue, T.; Qu, L.; Wu, B. Matching and 3D Reconstruction of Multibubbles Based on Virtual Stereo Vision. IEEE Trans. Instrum. Meas. 2014, 63, 1639–1647. [Google Scholar] [CrossRef]
- Xue, T.; Xu, L.S.; Zhang, S.Z. Bubble behavior characteristics based on virtual binocular stereo vision. Optoelectron. Lett. 2018, 14, 44–47. [Google Scholar] [CrossRef]
- Xue, T.; Qu, L.; Cao, Z.; Zhang, T. Three-dimensional feature parameters measurement of bubbles in gas-liquid two-phase flow based on virtual stereo vision. Flow Meas. Instrum. 2012, 27, 29–36. [Google Scholar] [CrossRef]
- Xue, T.; Chen, Y.; Ge, P. Multibubbles Segmentation and Characteristic Measurement in Gas-Liquid Two-Phase Flow. Adv. Mech. Eng. 2013, 5, 143939. [Google Scholar] [CrossRef]
- Mitra, A.; Bhattacharya, P.; Mukhopadhyay, S.; Dhar, K.K. Experimental study on shape and path of small bubbles using video-image analysis. In Proceedings of the 2015 3rd International Conference on Computer, Communication, Control and Information Technology, C3IT 2015, West-Bengal, India, 7–8 February 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015. [Google Scholar] [CrossRef]
- Acuña, C.A.; Finch, J.A. Tracking velocity of multiple bubbles in a swarm. Int. J. Miner. Process. 2010, 94, 147–158. [Google Scholar] [CrossRef]
- Cheng, D.C.; Burkhardt, H. Template-based bubble identification and tracking in image sequences. Int. J. Therm. Sci. 2006, 45, 321–330. [Google Scholar] [CrossRef]
- Krimerman, M. Reconstruction of Bubble Trajectories and Velocity Estimation. Master’s Thesis, The University of British Columbia, Vancouver, BC, Canada, February 2013. [Google Scholar] [CrossRef]
- Bakshi, A.; Altantzis, C.; Bates, R.B.; Ghoniem, A.F. Multiphase-flow statistics using 3D detection and tracking algorithm (MS3DATA): Methodology and application to large-scale fluidized beds. Chem. Eng. J. 2016, 293, 355–364. [Google Scholar] [CrossRef]
- Feng, X.F.; Pan, D.F. Research on the application of single camera stereo vision sensor in three-dimensional point measurement. J. Mod. Opt. 2015, 62, 1204–1210. [Google Scholar] [CrossRef]
- Figueroa-Espinoza, B.; Mena, B.; Aguilar-Corona, A.; Zenit, R. The lifespan of clusters in confined bubbly liquids. Int. J. Multiphase Flow 2018, 106, 138–146. [Google Scholar] [CrossRef]
- Fu, Y.; Liu, Y. Experimental study of bubbly flow using image processing techniques. Nucl. Eng. Des. 2016, 310, 570–579. [Google Scholar] [CrossRef]
- Chakraborty, S.; Das, P.K. Characterization of bubbly flow through the fusion of multiple features extracted from high speed images. In Proceedings of the 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2016; pp. 1–5. [Google Scholar] [CrossRef]
- De Langlard, M.; Al-Saddik, H.; Charton, S.; Debayle, J.; Lamadie, F. An efficiency improved recognition algorithm for highly overlapping ellipses: Application to dense bubbly flows. Pattern Recognit. Lett. 2018, 101, 88–95. [Google Scholar] [CrossRef]
- Honkanen, M. Reconstruction of a three-dimensional bubble surface from high-speed orthogonal imaging of dilute bubbly flow. Int. J. Multiphase Flow 2009, 63, 469–480. [Google Scholar] [CrossRef] [Green Version]
- Markus, H.; Pentti, S.; Tuomas, S.; Jouko, N. Recognition of highly overlapping ellipse-like bubble images. Meas. Sci. Technol. 2005, 16, 1760–1770. [Google Scholar] [CrossRef]
- Zhang, W.H.; Jiang, X.; Liu, Y.M. A method for recognizing overlapping elliptical bubbles in bubble image. Patt. Recognit. Lett. 2012, 33, 1543–1548. [Google Scholar] [CrossRef]
- Fujisawa, N.; Fujita, Y.; Yanagisawa, K.; Fujisawa, K.; Yamagata, T. Simultaneous observation of cavitation collapse and shock wave formation in cavitating jet. Exp. Therm. Fluid Sci. 2018, 94, 159–167. [Google Scholar] [CrossRef]
- Kompella, V.R.; Sturm, P. Collective-reward based approach for detection of semi-transparent objects in single images. Comput. Vis. Image Underst. 2012, 116, 484–499. [Google Scholar] [CrossRef] [Green Version]
- Hata, S.; Saitoh, Y.; Kumamura, S.; Kaida, K. Shape extraction of transparent object using genetic algorithm. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; Volume 4, pp. 684–688. [Google Scholar] [CrossRef]
- Han, K.; Wong, K.Y.K.; Liu, M. Dense reconstruction of transparent objects by altering incident light paths through refraction. Int. J. Comput. Vis. 2018, 126, 460–475. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. arXiv. 2016. Available online: https://arxiv.org/abs/1506.01497 (accessed on 23 September 2018). [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | x coordinate | y coordinate |
|---|---|---|
| H | ||
| R | ||
| C | ||
| 0 | ||
| 0 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Xu, H.; Pooneeth, V.; Gao, X.-Z. A Novel One-Camera-Five-Mirror Three-Dimensional Imaging Method for Reconstructing the Cavitation Bubble Cluster in a Water Hydraulic Valve. Appl. Sci. 2018, 8, 1783. https://doi.org/10.3390/app8101783
Wang H, Xu H, Pooneeth V, Gao X-Z. A Novel One-Camera-Five-Mirror Three-Dimensional Imaging Method for Reconstructing the Cavitation Bubble Cluster in a Water Hydraulic Valve. Applied Sciences. 2018; 8(10):1783. https://doi.org/10.3390/app8101783
Chicago/Turabian StyleWang, Haihang, He Xu, Vishwanath Pooneeth, and Xiao-Zhi Gao. 2018. "A Novel One-Camera-Five-Mirror Three-Dimensional Imaging Method for Reconstructing the Cavitation Bubble Cluster in a Water Hydraulic Valve" Applied Sciences 8, no. 10: 1783. https://doi.org/10.3390/app8101783