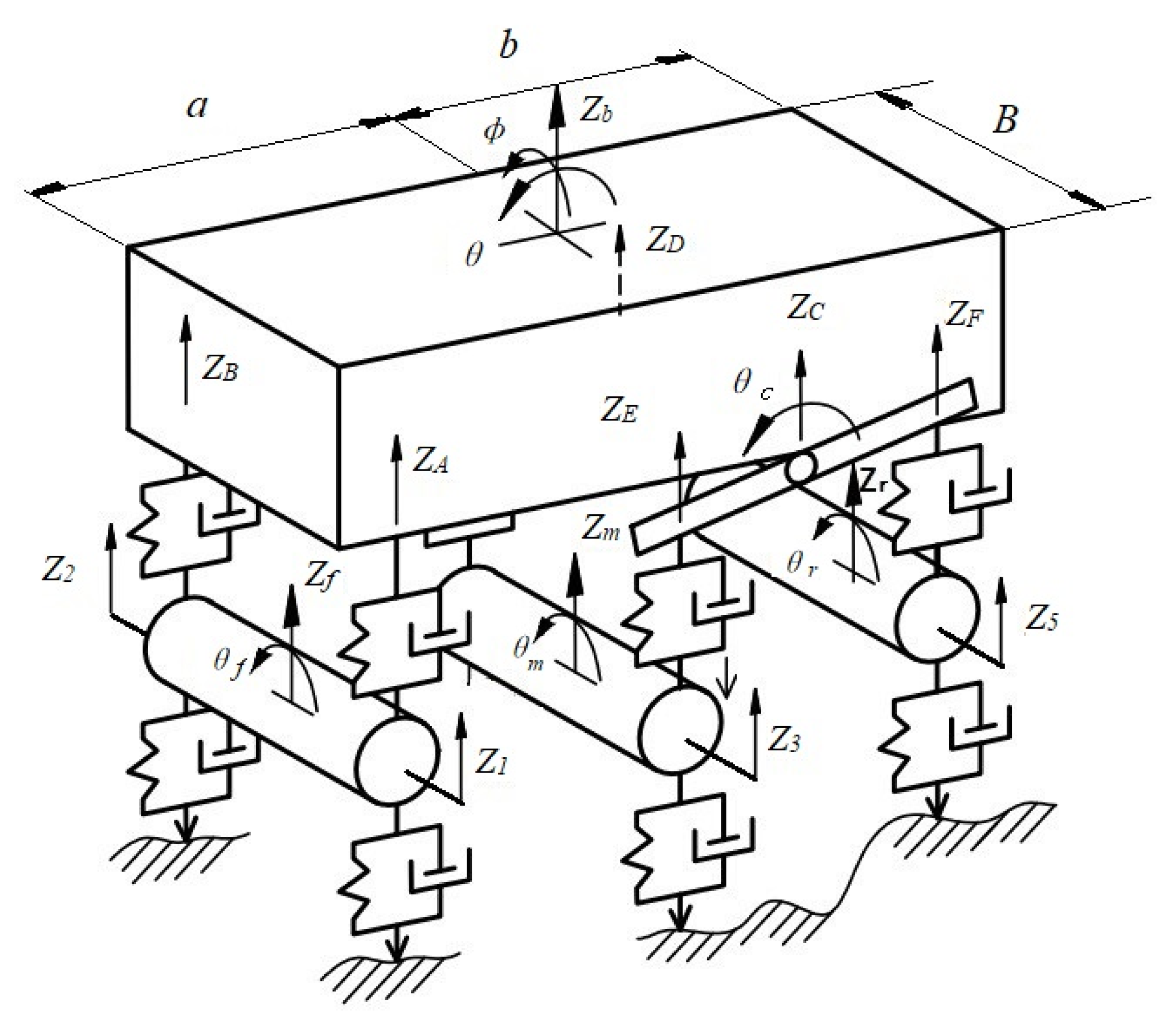
3.1. Eleven-DOFs Dump Truck Model
The dump truck is simplified to an 11-DOFs model comprising three DOFs associated with the vehicle body (
Zb,
θ,
Φ), six DOFs associated with the bounce and rolling motions of three integral axles (
ZA,
ZB,
ZC,
ZD,
ZE,
ZF), and two DOFs describe the pitch motions of the balanced suspension (
θC,
θD), as seen in
Figure 6.
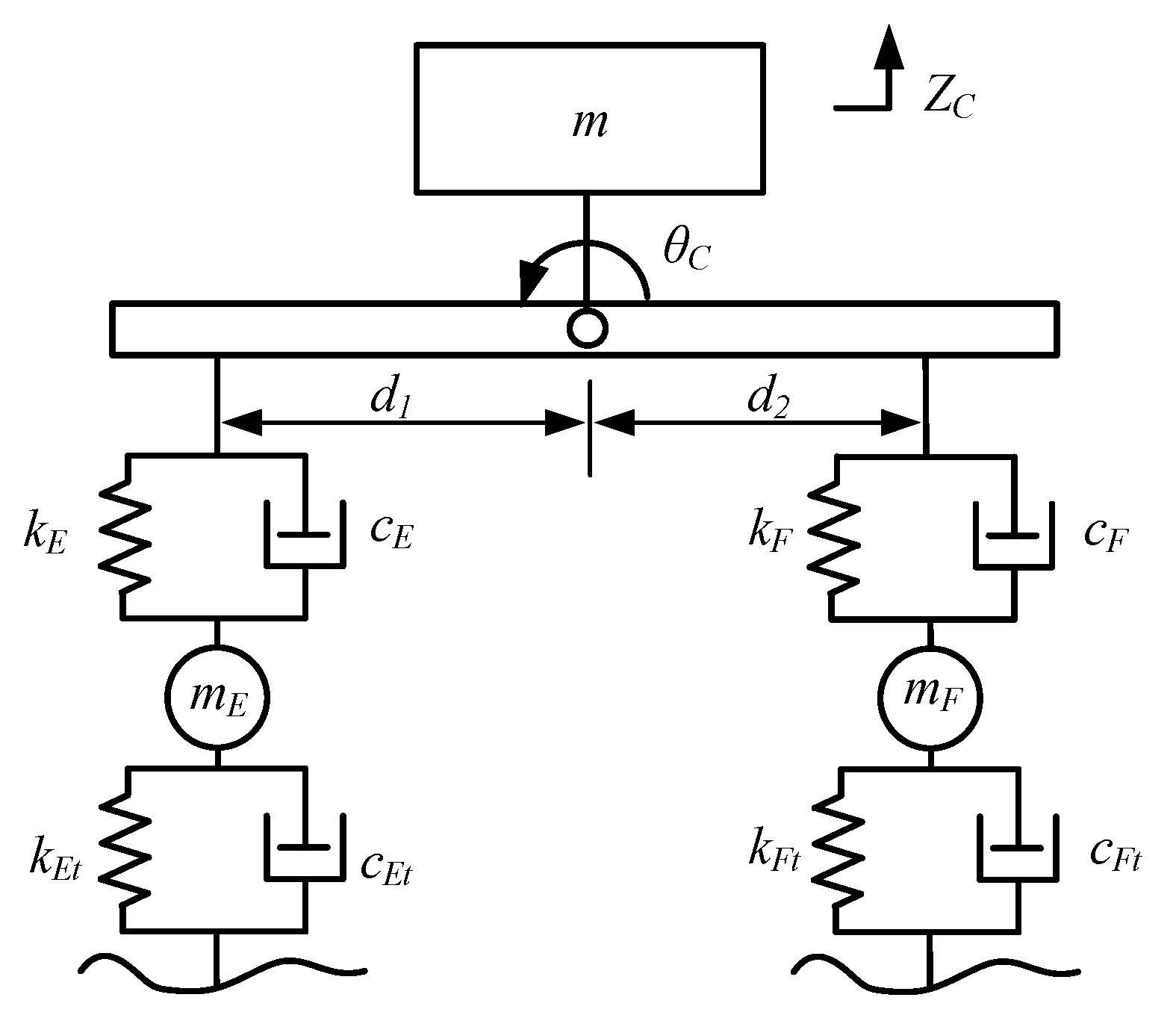
To simplify the modeling of the balanced suspension, the leaf spring is divided into two separate stiffnesses (
kE and
kF) and damping (
cE and
cF). Both ends of the leaf springs are separately linked with the front and rear axle through the rigid stabilizer rod. The front and rear axle vibrations are coupled together with the stabilizer rod [
33]. The equivalent balance suspension model is shown in
Figure 7.
The dynamic model of the dump truck, considering the integral axle and the balanced suspension, can be written in matrix form as:
where
M is the matrix representing vehicle body mass,
Z is the vector of vehicle dynamic responses,
C is the matrix of vehicle damping,
K is the stiffness matrix of the vehicle system,
Ct is the matrix of tire damping,
Kt is the stiffness matrix of the tire and
Qg is the vector of displacement inputs acting on the tires.
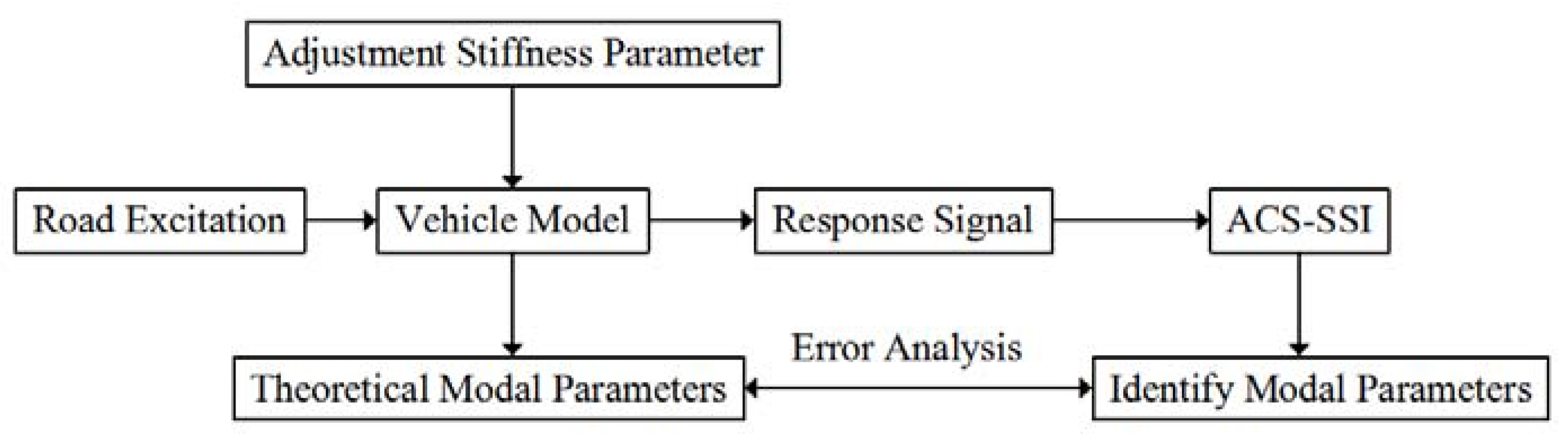
The differential equations of Equation (3) can be transformed into the state space equation (Equation (4)) to facilitate the simulation, reducing the need for solution time and computing resources under the premise of ensuring system integrity and accuracy.
The conventional method for equation transformation is achieved by selecting an appropriate intermediate variables
x, regardless of the derivative term in the input variable
u. The road roughness input
Qg was directly converted into the force input acting on the vehicle
=
f(
t) through numerical differential operation. Then:
where
I and
0 represent identity and null matrices with similar dimensions as the property matrices, respectively;
is a null column vector whose length is the same as that of forcing vector
f, and
x is a vector containing the states (displacement and velocity vectors). The state variables
x were selected as Equation (6):
Although input order reduction has been realized in Equation (5) via the conversion from to f(t), the essence of this order reduction is an approximate computational process of a numerical differentiation algorithm based on the Runge-Kutta method. Order reduction itself could cause truncation error input and reduce the reliability and accuracy of the system output. Therefore, to oversimplify the input vector, it is essential to keep the input derivative for obtaining reliability and accuracy.
At present, the transformation from a single-input single-output (SISO) differential equation containing an input derivative to state space representation is achieved mainly by selecting an appropriate intermediate variable. Based on the SISO transformation method, the input, output variable, and the status variable are expanded to the vector; the variable of each system is expanded to the coefficient matrix, and matrix operations are introduced into the conversion process. Then, it became possible to eliminate the input derivatives of multivariable equations,
, and the state-space equation was achieved, as shown in Equation (7):
where the state variable
x2 was selected as Equation (8):
After obtaining the state coefficient matrix and the input matrix, , the appropriate output state matrix C and the output control matrix D (general definition D = 0) were specified via the state space ss.m function in MATLAB, and an 11-DOFs state-space model of a dump truck was built on the basis of Equation (7).
The state matrix A contains all the characteristic information of the model. Therefore, by decomposing A, the modal natural frequency fn, damping ratio ξ, and the modal vector v can be obtained.
3.2. Influence of Suspension Faults on Modal Parameters
During the long-term operation of the vehicle, load conditions and environmental factors can cause fault phenomena such as cracks and breaks in leaf springs, resulting in changes in the performance parameters of the suspension springs and a decrease in spring stiffness. To realize the suspension fault identification based on modal parameter analysis, it is essential to first understand the specific influence of the fault on the modal parameters. Therefore, it is necessary to calculate the modal parameters of the suspension system, i.e., natural frequency, damping ratio and mode shape, under different spring stiffnesses through simulation in MATLAB (R2017a, MathWorks, Natick, MA, USA).
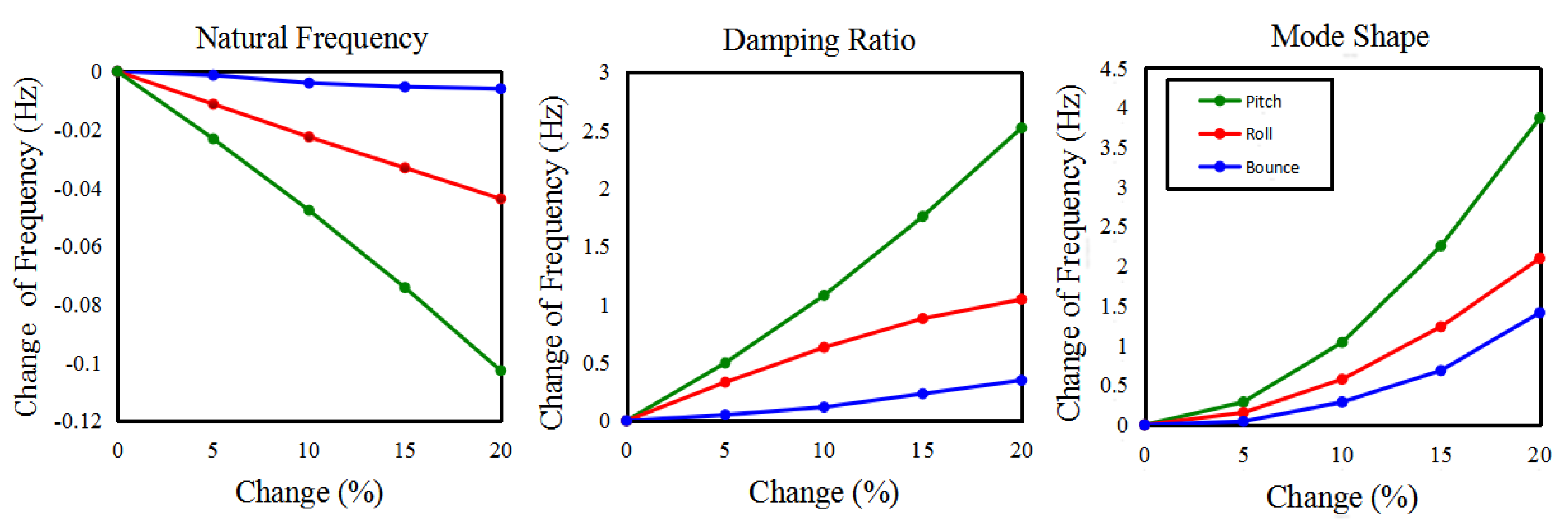
Firstly, the stiffness of the left rear spring is changed from 0% to 20% in the model to simulate spring failure and to study its effect on modal parameters.
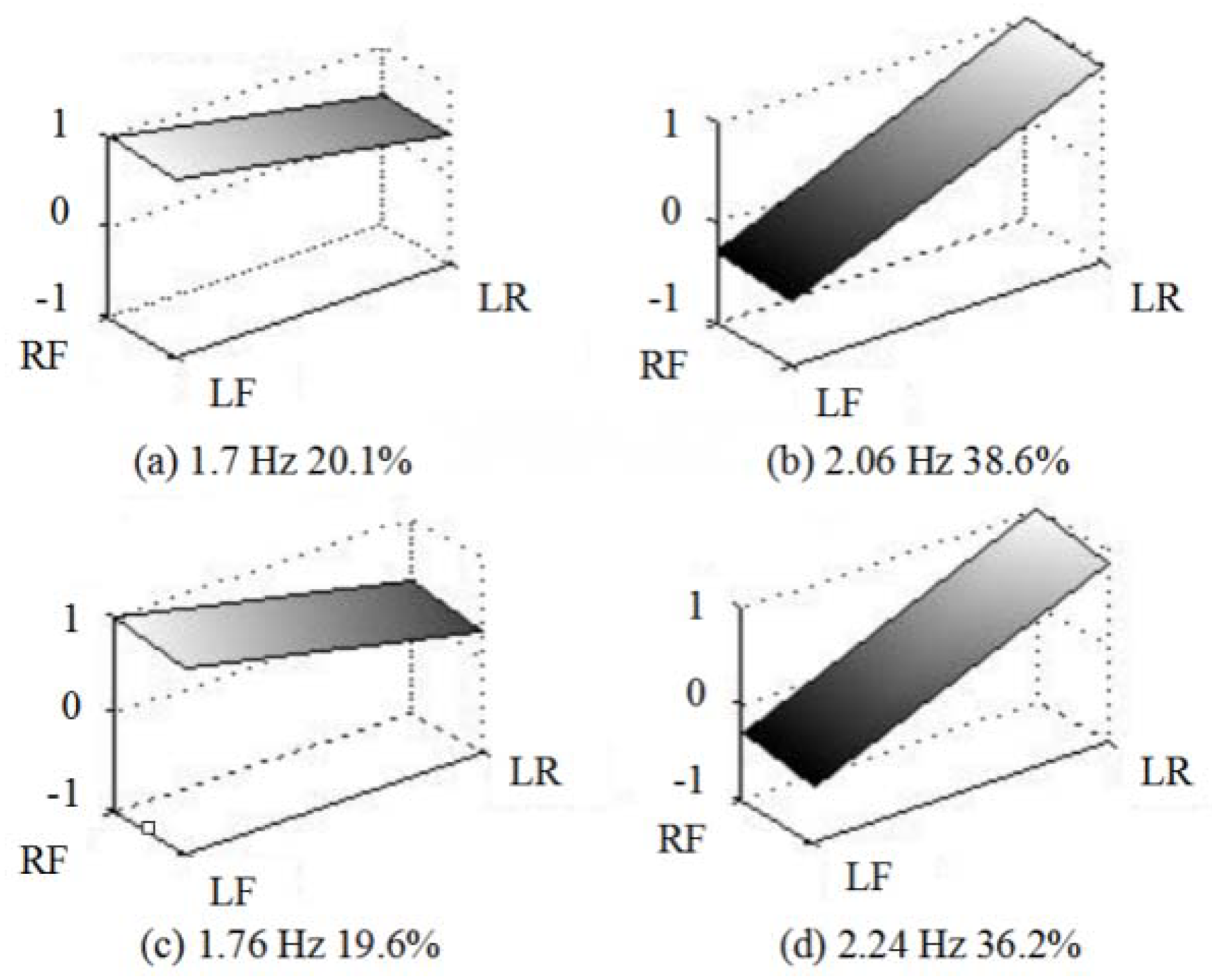
Figure 8 shows the changes in natural frequency, damping ratio and mode shapes caused by the drop in spring stiffness when the left rear leaf spring fails; the blue line represents the bounce mode, the green line represents the pitch mode and the red line represents the roll mode.
It can be seen from the first three modes that when the stiffness of the left rear spring is weakened, the natural frequencies of all three decreases to varying degrees, among which the pitch mode changes the most. Because of the small amplitude of the natural frequency variation, it is difficult to obtain accurate measurements in practical applications. The damping ratios of all three modes increased significantly, but the above suggested that the identification error of the damping ratio is larger than that of the other two. That is, the identified result can hardly reflect the actual change in damping ratio, so it is not suitable as an indicator of fault diagnosis. From the change of the vibration mode shapes in the three orders of modes in
Figure 8, due to the mode shapes being considered as eigenvectors, the values are dimensionless, and the changes are obvious. This obvious feature can be used to judge the fault, and from the previous analysis in
Section 2.2, the identification error of the modal mode is relatively small and thus suitable as a monitoring indicator.
It can be seen from the changes in the mode shape in
Figure 8 that as a feature vector, the value of the mode shape is dimensionless and its variation is more obvious. This distinctive feature can be used to diagnose the fault and is suitable as a monitoring indicator.
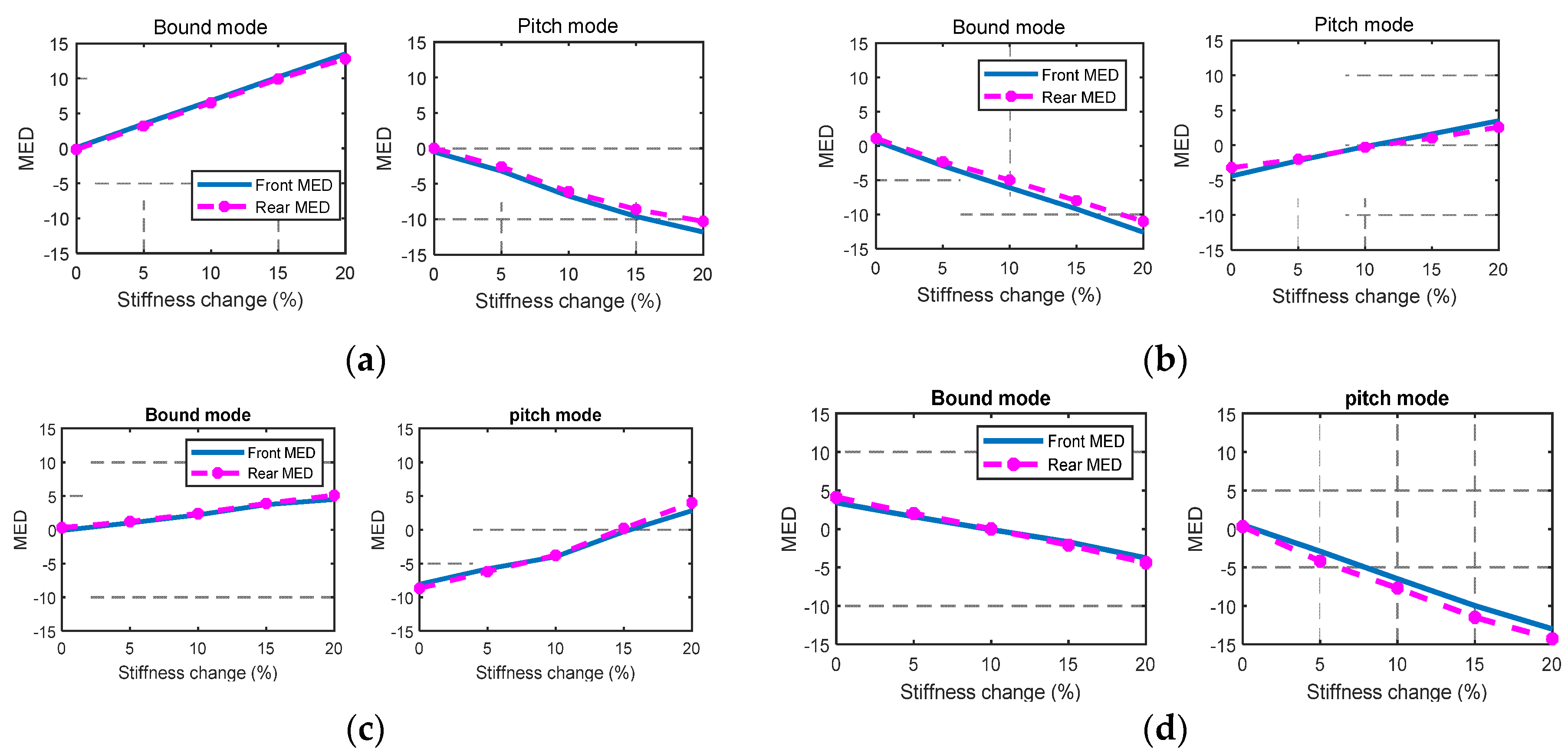
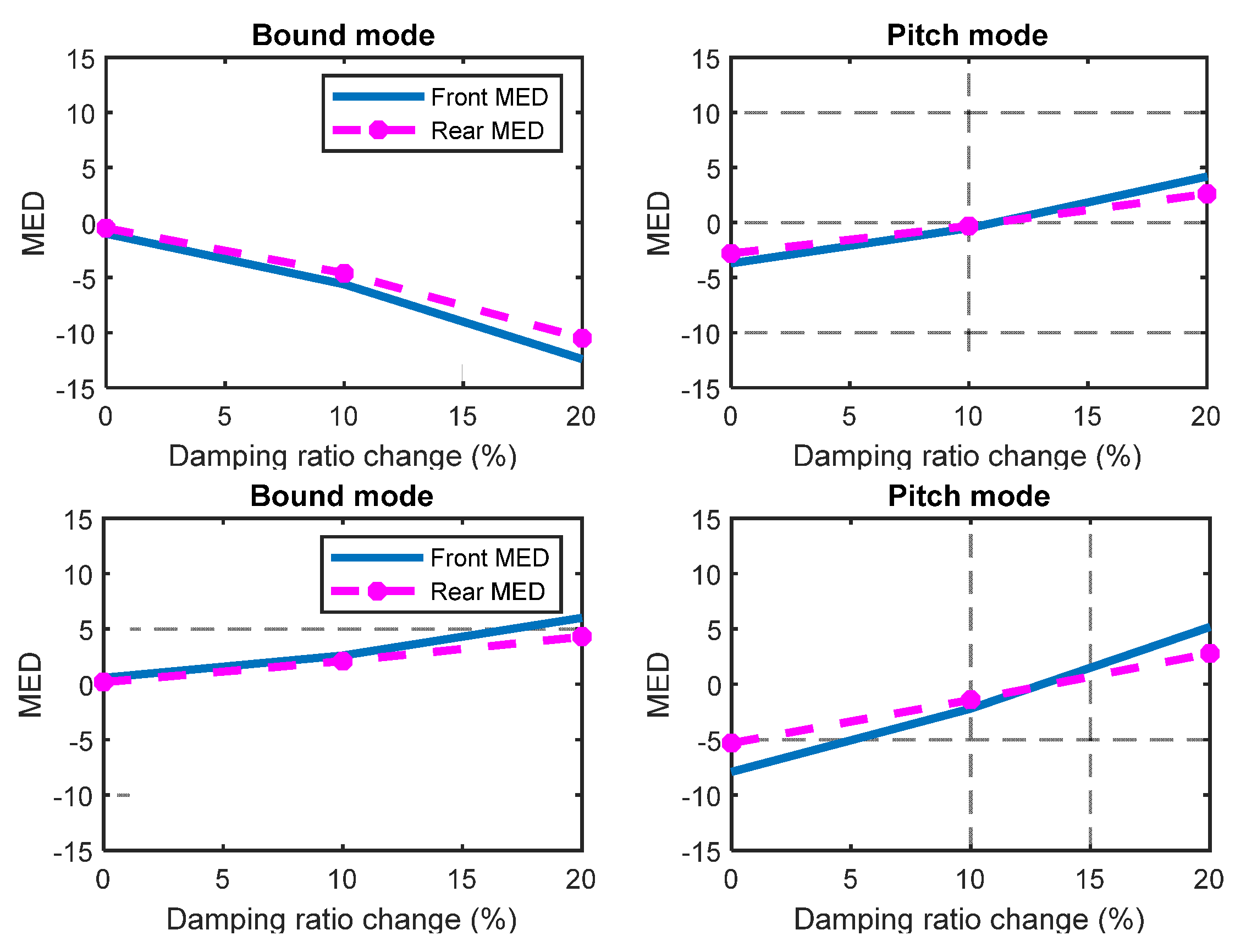
Then, the variation called modal energy difference (MED) is proposed to reveal the faults of suspension system more straightforwardly. In order to convey the imbalance of the mode shapes between the left and right sides, the rolling trends of mode shape are denoted as the differential of square of two mode shape, which is called modal energy difference (MED) in the following section. The MED between the left and right suspensions in bounce mode can be defined as Equation (9).
where in,
represents the difference between the vibration modes of left and right suspensions in front of the vehicle in the bounce mode, and
represents the MED in rear suspensions.
In
Figure 9, the solid line is the MED between the two front suspensions and the dashed line represents the corresponding MED at the rear of the vehicle. The left and right sides of each figure respectively represent the modal energy changes in the first-order mode (bounce mode) and the third-order mode (pitch mode).
As shown in
Figure 9a, when the left front wheel leaf spring fails, the difference in modal energy in the bounce mode increases by about 15%, and the difference in modal energy in the pitch mode drops by about 10%. When the right front wheel leaf spring fails (
Figure 9b), the modal energy of the bounce mode decreases by about 10%, while the modal energy of the pitch mode increases from −5% to 3%, which is opposite to the trend presented in the two-order mode of the left front leaf spring. When the left rear leaf spring fails (
Figure 9c), the modal energy of bounce mode increases by 3%, and the pitch mode increases from −7% to 3%. As shown in
Figure 9d, the decrease in the stiffness of the right rear leaf spring causes a decrease in the modal energy of two modes, wherein the pitch mode decreases by 15%.
It can be seen that the weakening of the leaf springs at different positions of the vehicle can cause different changes in modal energy, because the change of spring stiffness at different positions will cause the vehicle to roll in different directions. It can be concluded that the modal energy difference is sensitive to leaf spring failure in both the bounce and pitch modes. Moreover, the position of the fault and the magnitude of the change in stiffness can be determined by the change in the modal energy difference.
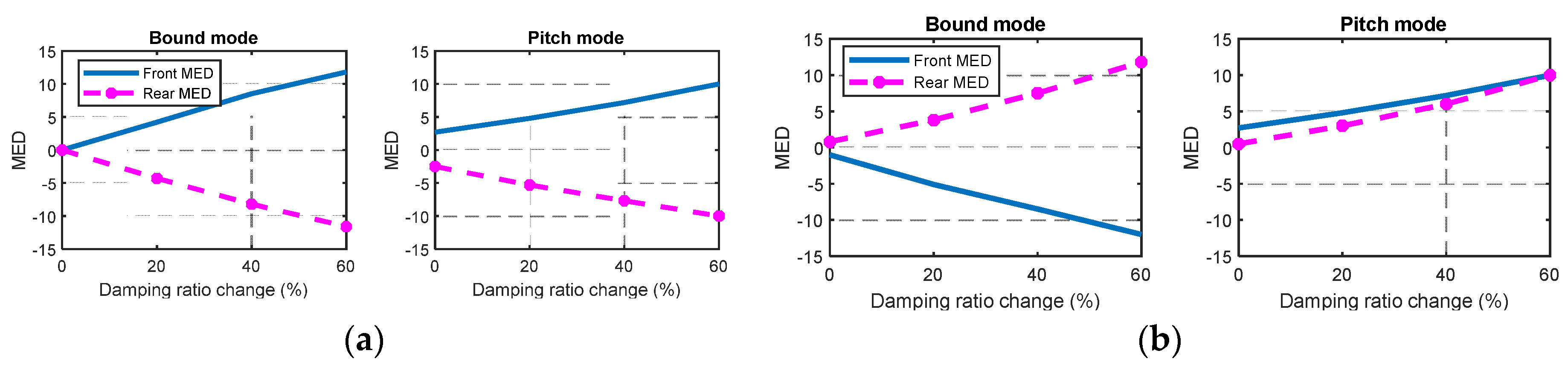
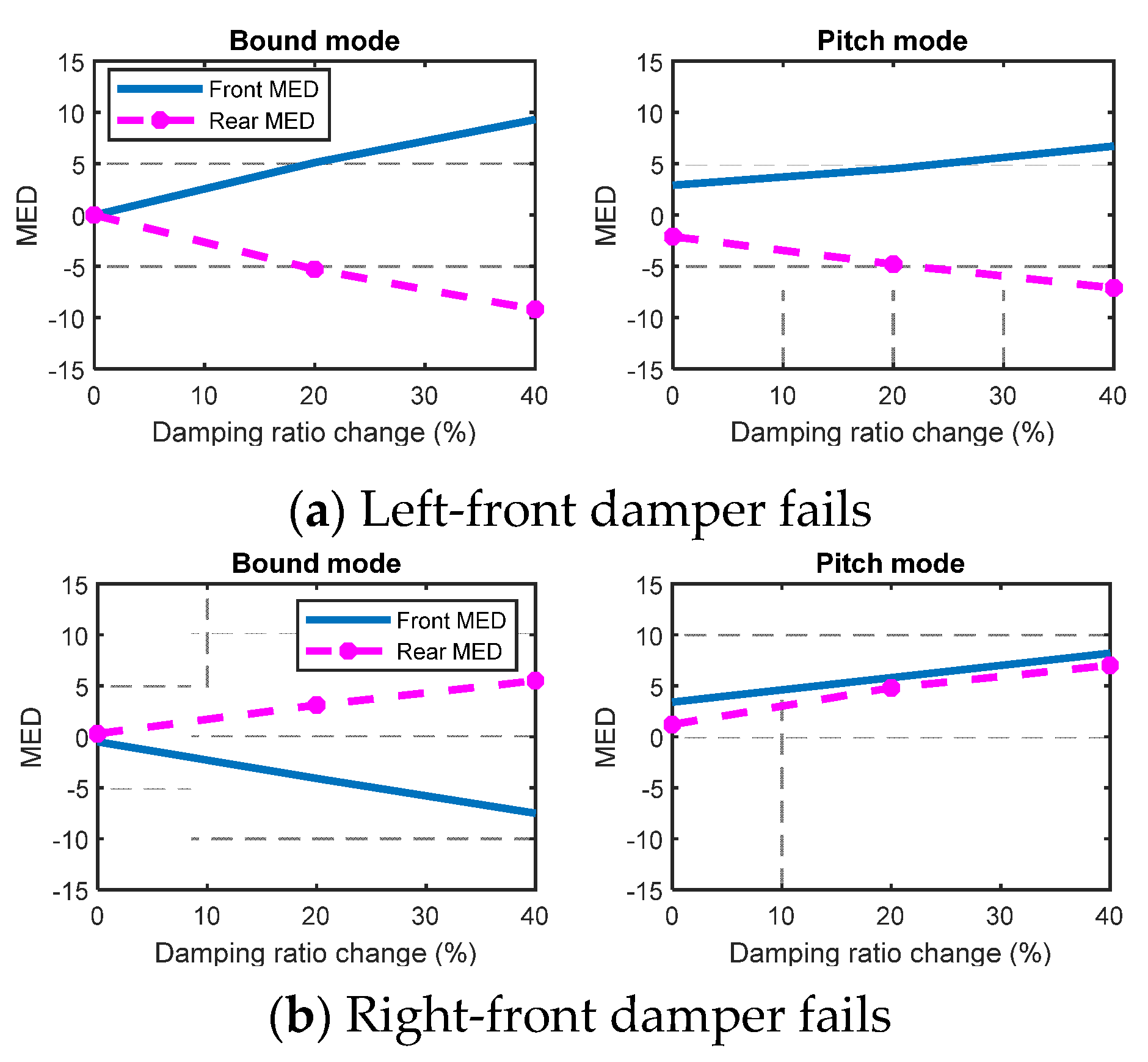
In order to simulate the influence of the damper fault on the modal parameters, the damping value of the shock absorber is gradually reduced from the original 100% to 30%.
As the damping of the left-front damper decreases, as seen in
Figure 10a, the MED of the front and rear in the bounce mode presents a diametrically opposite trend. In the pitch mode, the MED of the front side gradually increases with the decrease of the damping value, and that of the rear side gradually decreases. If the right-front damper fails (
Figure 10b), the MED in the bounce mode exhibits a tendency opposite to that of left-front side. In the pitch mode, unlike the left-front damper failure, the MED of the front and rear side increases slightly with the decrease of the damping.
It can be seen that the modal energy difference can clearly indicate the damping changes in a shock absorber and reveal the fault behind it. Therefore, the damper failure can be effectively monitored and diagnosed by the method proposed in this paper.
To summarize the tendencies of stiffness and damping ratio in the
Table 3, we can see the positive and negative direction is distinctive in every situation. This shows the proof that MED can indicate the faults.
It strongly suggests that the modal energy differences are susceptible to stiffness changes and damping changes. Furthermore, the diverse trends of modal energy correspond to the occurrence of different faults, which help to achieve the purpose of fault diagnosis positioning and condition monitoring.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}