1. Introduction
A real snake has simple figure like a string, and can locomote by using difference between friction in the propulsive direction and one in the normal direction. It can locomote not only flatland but also irregular terrain such as desert, wildland and grassland, by choosing its motion and posture depending on environments/tasks. Moreover, it can realize skilled locomotions such as swimming, climbing, and squeezing. That is, the real snake possesses highly adaptability corresponding to the environments/tasks. A snake-like robot mimics such highly adaptability of the real snake, and is expected to be an adaptable robot corresponding to the environments/tasks.
Many literatures have reported with respect to locomotion controls of snake-like robots. Hirose, who is a pioneer of the studies for snake-like robots, has found that a curvature of a snake changes sinusoidally along its body axis. He has named it “Serpenoid Curve”, and applied it to a trajectory generation for snake-like robots [
1]. Endo et al. have implemented a propulsive locomotion control of snake-like robots by using the Serpenoid Curve [
2]. As studies extending the Serpenoid Curve, Yamada et al. have proposed the kinematics to stabilize head direction during tracking the robot to the Serpenoid Curve, and have implemented the kinematics on the robot [
3]. Ma et al. have implemented slope climbing control by adjusted amplitude of the Serpenoid Curve via a simulator [
4]. In our previous study, we have designed a servo control system for tracking to the Serpenoid Curve [
5]. Relative researches with respect to propulsive control use difference of the friction forces between the propulsive direction and the normal direction also have been reported [
6,
7]. In our previous study, a head position control [
8,
9,
10], a force control [
11] and a slope climbing control [
12] have been designed.
These researches [
6,
7,
8,
9,
10,
11,
12] have been based on a dynamical model of the snake-like robot. The discussions on it has been reported in order to avoid singular configurations as well. In these researches, the model is generally assumed to install non side-slipping passive wheels on its links. Prautsch et al. have derived the dynamical model of the snake-like robot without side-slipping, and have proven some theories and lemmas regarding the dynamics [
13,
14]. As one of the results of the analyses, they have referred the snake-like robot takes the singular configuration as long as it poses either straight line or arc shape. The result has been shared by a lot of researchers. For example, Date et al. have also reported that the snake-like robot becomes singular when the robot poses straight line or arc shape [
15,
16,
17]. In addition, Ye et al. have also stated that straight line or arc shape are singular [
18]. Matsuno et al. [
19] and Tanaka et al. [
20,
21,
22] also have mentioned that the postures of straight line or arc shape are the singular configuration as well. They [
15,
16,
17,
18,
19,
20,
21,
22] have led the same results based on the analysis by Prautsch et al. [
13,
14]. In addition, Dear et al. [
23,
24] and Guo et al. [
25] have reported the snake-like robot is the singular configuration when all relative angles are equivalent. It indicates the posture under this situation is either straight line or arc shape. Liljebäck et al. have addressed a dynamical model supposing the snake-like robot with side-slipping, and have derived the model with viscous friction forces working at the center of each link. They have analyzed nonlinear controllability of the models, and finally have also proven that straight line and arc shape are singular configurations [
26,
27,
28,
29].
While these studies [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28] have addressed the either fully non side-slipping or fully side-slipping model, Tanaka et al. have addressed a model including both side-slipping and non side-slipping links [
30]. They have referred that either the straight line or the arc shape are still the singular configuration with respect to the fully non side-slipping model based on Prautsch’s analysis [
14]. Nevertheless, they have concluded that following two conditions are the singular configuration regarding to the model including side-slipping.
Condition
These researches [
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30] have a common assumption that the robot has either the passive wheel or the center of gravity located at the center of each link. This common assumption means link length and/or position of the passive wheel are defined as common variable. Hence, the common assumption contributes the analysis simple, because each element of its Jacobian matrix can be factorized by link length or position of passive wheel as common variable. Accordingly, each element is able to be formulated by summation of the trigonometric functions with link length or position of passive wheel as the common variable. For example, Tanaka et al. have defined the length from a front joint to a passive wheel and the one from a passive wheel to hind joint as a same variable for all link. To satisfy this definition, they have supposed that the link length of lifted links is not changed by limiting lifting height infinitesimally, even though their robot allows to lift up it to enough height [
30]. Thus, the analyses of previous studies subject to the limitation regarding to the common variable, although these variables could be designable. Conversely, effects of link position of the passive wheel and/or length to its behavior have never discussed yet.—i.e., the analysis without any limitation has never been discussed.
This paper elucidates a generalized singularity analysis of the snake-like robot. The generalized analysis is denoted as analysis of singularity of a model which defines all designable parameters such as the link length and/or the position of the passive wheel as arbitrary variables. From a viewpoint of system design, revealing a relationship between the designable parameters and system behavior affects behavior of the whole system including the locomotion control system as well. In the case of the inverted pendulum for example, it has been reported that changing its designable parameters such as link length results in extending stability margin of the system [
31,
32,
33]. In another instance, the Jansen linkage mechanism, a representative example of closed link mechanism, is capable of transitioning its gaits significantly by changing length ratio of all link [
34,
35]. In addition, its characteristic influences robot’s morphology as well [
36]. The snake-like robot is a kind of non-holonomic system, and its non-holonomic constraints come from the characteristic of the non side-slipping passive wheels. Hence, the position of the passive wheel affects the system behavior. Thus, discussion on effect of the designable parameters is expected to provide some advantages in this area as well.
This paper addresses two main issues. The first main issue is to elucidate dependent relationship between the singular configuration of the snake-like robot and the designable parameters such as link length and position of the passive wheel. As discussed above, the previous studies have identified that the singular configuration of the snake-like robot is either straight line or arc shape. This identification is equivalent to that the singular configuration depends on only its state vector. Tanaka et al. have referred that the postures of straight line or arc shape are the singular configuration regarding to the model with non side-slipping while they have referred that the
Conditions are the singular configuration regarding to the model including side-slipping [
30]. In addition, they have defined all link length as unique parameter. On the other hand, this paper addresses the model which defines the designable parameters as non-unique variables in order to reveal the relation between the singular configuration and the designable parameters. This difference of the assumptions results in a substantial increase of the analysis complexity, because the link length and the position of the passive wheel defined as different parameters are unable to factorized as common variables.
Therefore, in this paper, an analysis method using redundancy of the snake-like robot is proposed. The singular configuration of the snake-like robot is analyzed based on the method. The proposed method contributes to simplify singularity analysis concerned with the designable parameters such as link length. An epitomization of the method is to resolve the snake-like robot into subsystems every three links. Applying the same analysis to all subsystem leads to singularity analysis of whole system. Since the subsystem is absolutely smaller than the whole system, the epitomization reduces complexity coming from different parameters. The subsystem is also able to be composed corresponding to the model including side-slipping as well as the one with non side-slipping. Consequently, the singular configurations of both the model including side-slipping and the one with non side-slipping are analyzed in this paper.
The second main issue is to characterize the singular configuration of the snake-like robot by the axials of the passive wheels of all non side-slipping link. Tanaka et al. [
30] have proven that the singular configuration is characterized by the axials of the passive wheels as the
Conditions. The
Conditions is novel characteristic to identify the singular configuration. However, they had a limitation for maintaining the uniform link length. By clearing the limitation, this paper proves effectiveness of the novel characteristic even if the designable parameters are defined as different values and the model includes side-slipping links.
This paper is organized as follows:
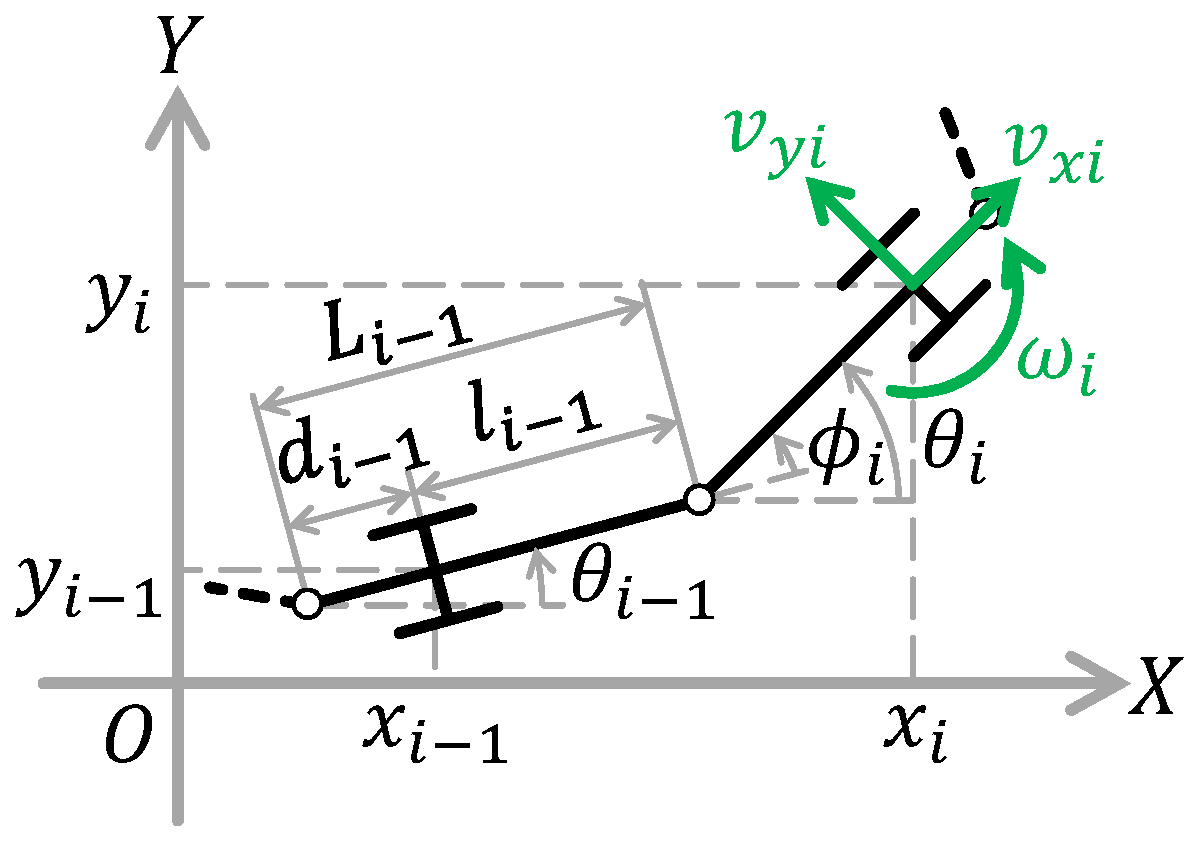
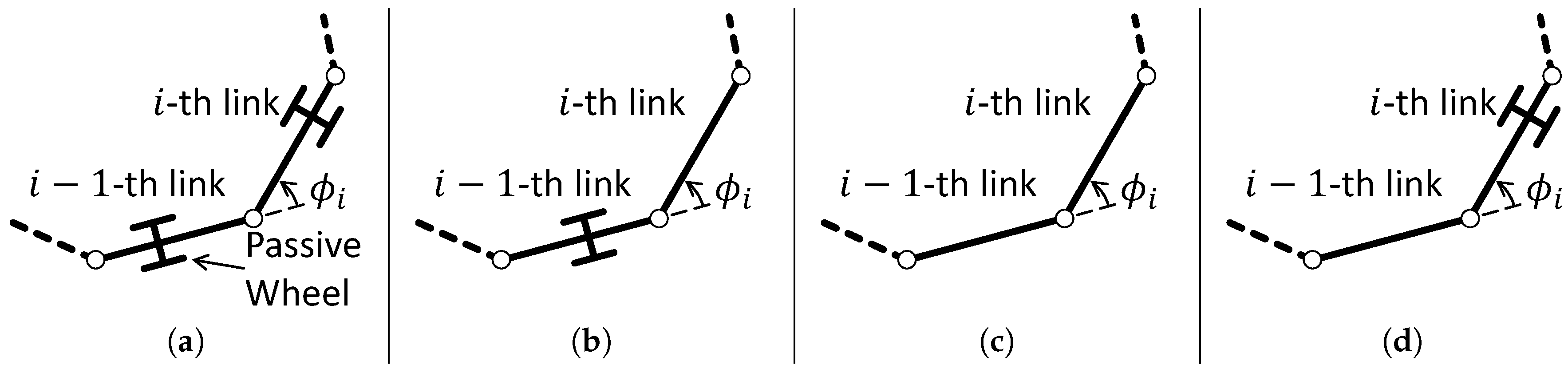
Section 3 derives both kinematics and Jacobian matrices of the snake-like robot. Four kinds of kinematics around a joint are derived corresponding to side-slipping patterns. The Jacobian matrices of both the snake-like robot including side-slipping and the one with non side-slipping are formulated by composing the four kinds of kinematics redundantly. By applying the analysis method using redundancy,
Section 4 analyzes the singular configuration of the snake-like robot. Two theories and one lemma are proven with respect to the model with non side-slipping. Also, two theories and two lemmas are proven with respect to the model including side-slipping.
Section 5 visualizes the analysis results via two numerical simulations.
Section 6 concludes this paper.
4. Singularity Analysis
This section analyzes singularity of
n-link snake-like robot. Since elements of matrix to be analyzed is unable to factorize to summation of trigonometric function, it is inappropriate to analyze the singularity by the method of Tanaka et al. [
30] in the case of the snake-like robot supposed to non-uniform designable parameters addressed in this paper. The key point of our proposed method is in redundancy of the system which is one of big reason to make the snake-like robot popular. Using redundancy results in avoidance of complexity as well as systematic solution. Our proposed method provides the analysis results as same as Tanaka’s analysis [
30]. In addition, the singular configuration of the snake-like robot is identified as follows:
The singular configuration of the snake-like robot with non side-slipping is analyzed first in order to propose our analysis method using redundancy as well as to prove that the analysis results in the above two conditions. The analysis proves as well that the singular configuration of the snake-like robot depends on the designable parameters. The singular configuration of the snake-like robot including side-slipping is analyzed next. The analysis also proves that the singular configuration of the snake-like robot is identified as the above two even if the side-slipping links are included.
4.1. Snake-Like Robot with non Side-Slipping
The singular configuration of the snake-like robot with non side-slipping is analyzed first. The previous studies have reported that the singular configuration is either straight line or arc shape—i.e., it depends on only state vector. This analysis proves that the singular configuration of the snake-like robot depends on the designable parameters (such as link length and/or the position of the passive wheel) as well as the state vector. With respect to the snake-like robot with non side-slipping, following 2 theories and 1 lemma are obtained.
Theorem 1. Except for , (8) is rank deficient if and only if, , Proof. From (
8), since
, rank of (
8) drops when rank
, and the snake-like robot poses the singular configuration. Row vectors of (
8) are denoted as
. Since (
8) possesses one independent row vector when rank
= 1, it can be written by using arbitrary constants
as follows:
where,
. Rank of (
12) equals 1 even if any 2 row vectors are chosen.—i.e., if submatrices
, consisting of adjacent two row vectors, satisfy ∀rank
= 1, rank
= 1 and
is rank deficient.
is
From
since
is rank safficient,
By finding rank deficient conditions of , that is, solving , the conditions of which the snake-like robot poses the singular configuration are identified.
Please note that if
, it might be able to rank rank
= 2 even if ∀rank
= 1 in (
12). In particular, when
rank
= 2, if
and
are linear independent. However, it is determined as rank deficient in above mentioned condition, because rank
= rank
= 1. Since
,
only when
. Because
as long as
. Furthermore,
as long as
even if
.
Finally, since
except for
, (
8) is rank deficient if and only if
, (
11). □
Equation (
11) clearly shows that the singular configuration of the snake-like robot depends on the designable parameters as well as the state vector. Thus, it is limited into neither straight line nor arc shape. Equation (
11) indicates to be unable to factorize to summation of trigonometric function due to different coefficients in the premise of different parameter definition. Furthermore, complexity of
is more apparent than (
11). This predisposition points difficulty of analyzing the Jacobian matrix at a time, and the method using redundancy has an advantage for avoiding the complexity.
Lemma 1. , —i.e., if and only if the axials of the passive wheel overlap.
Proof. In (
13),
and equation in parentheses equals
x coordinate of
jth link corresponding to
th link. Hence, the wheels of
jth link and
th link overlap when
. Thus, the axials of the passive wheel clearly overlap if
. □
The proposed analysis method is capable of analyzing simply even though the designable parameters of each link are defined as different ones. On the other hand, it has been shown the analysis method outputs uncertain result if the special condition () is satisfied. It also has been proven that the condition is satisfied when the axials of the adjacent passive wheels overlap. Since it is pose of which the links wholly overlaps, the actual snake-like robot generally never take that pose.
Theorem 2. The snake-like robot is singular if and only if the axials of all passive wheel intersect at a common point or are parallel.
Proof. ith link is focused on. A coordinate is set the origin at position of the passive wheel of
ith link, and let the
X axis and the
Y axis are on its propulsive direction and normal direction of the passive wheel respectively. Let
and
are an intercept of the axial of the passive wheel of
th link and the one of
th link respectively. The axials of the passive wheels of all
th,
ith and
th link intersect at a common point, if
. It is proven that equations of the intercepts on that situation equals to (
11).
Figure 4 depicts the axials of all
th,
ith and
th link.
The position of the passive wheel of
th link is
Since a slope of the
th link equals
, a slope of the axial of the passive wheel is follow:
Hence, the intercept of the passive wheel of the
th link
is
Also, the intercept of the passive wheel of the
th link
is
By multiplying
to the both side,
The axials of all passive wheel intersect at a common point when
, (
14). Since (
14) equals (
11), the axials of all passive wheel intersect at a common point when the snake-like robot is singular.
When
, (
11) equals (
14) at 0. Since
represents the axials of the passive wheel are parallel, the axials of all passive wheel are parallel when the snake-like robot is singular. □
4.2. Snake-Like Robot with Side-Slipping
The singular configuration of the snake-like robot including side-slipping is analyzed next. It also analyzed as same as the one with non side-slipping as well. An analysis result shows that it satisfies the two conditions mentioned at beginning of this section. With respect to the snake-like robot including side-slipping, following 2 theories and 2 lemmas are obtained.
Theorem 3. Except for , (9) is rank deficient if and only if , Proof. From (
9), since columns after 3rd column are clearly rank sufficient and
, rank of (
9) drops and the snake-like robot is singular, when rank
. (
10) is analyzed as well as (
8). Thus, conditions of which rank
drops are formulated. Where,
is expanded with supposing
as the most complex case.
is transformed as:
Therefore, except for
, (
10) is rank deficient if and only if
, (
15). □
Equation (
15) also indicates as well as (
11) that the singular configuration of the snake-like robot depends on the designable parameters as well as the state vector.
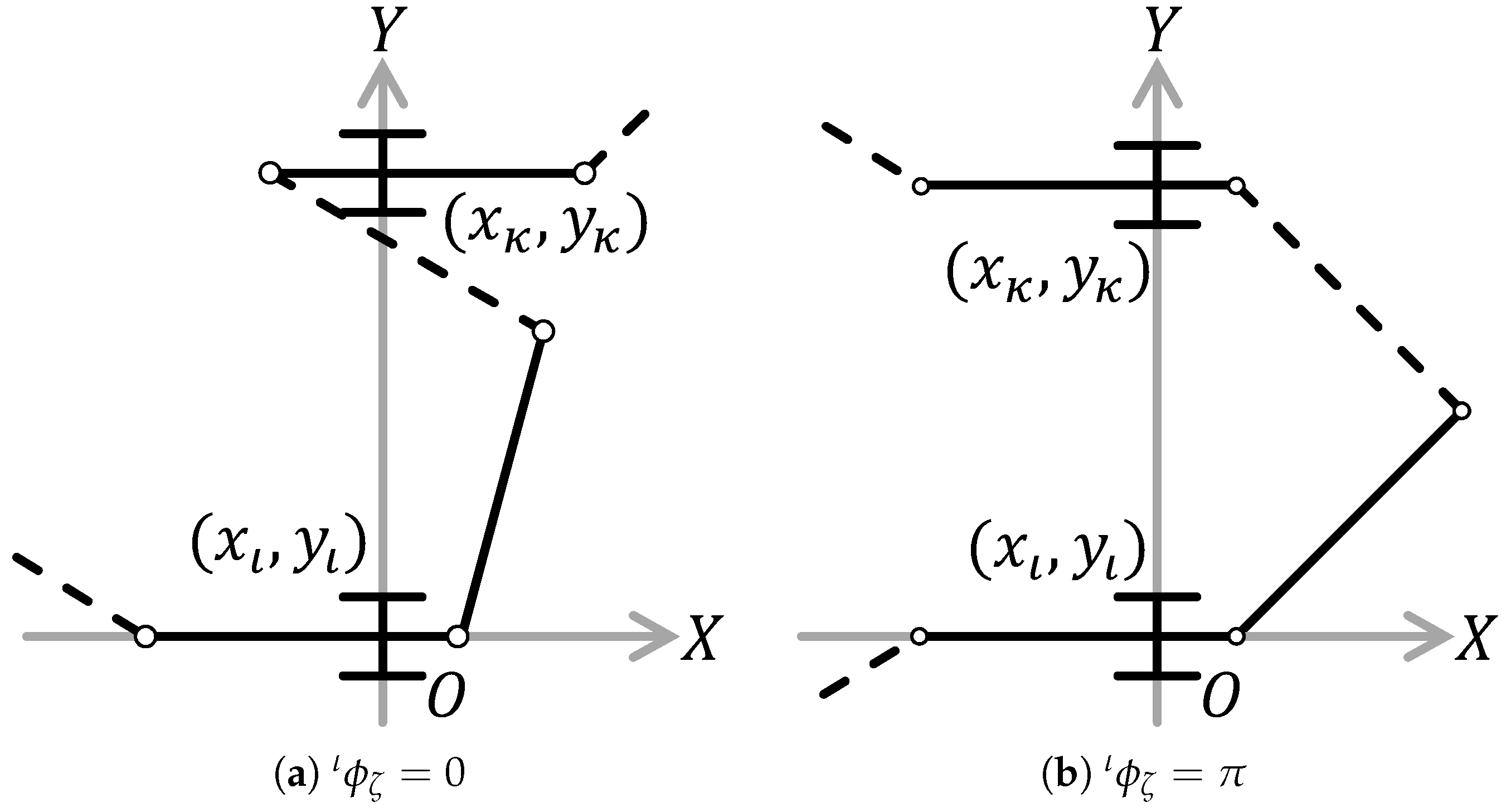
Lemma 2. is singular if and only if the joint of next non side-lipping link is placed on a axial of the passive wheel of current non side-slipping link (see Figure 5). Proof. In (
16),
and an equation in the parentheses equals the
x coordinate of the joint of
th link corresponding to
th link. □
Lemma 3. if and only if the axials of both current and next non side-slipping link overlap (see Figure 6). Proof. An equation in the parentheses equals x coordinate of the passive wheel of next non side-slipping link (th link) of when . Hence, the axials of the passive wheel of both current and next non side-slipping link overlap. □
Theorem 4. The snake-like robot is singular if and only if the axials of passive wheel of all non side-slipping links intersect at a common point or are parallel.
Proof. th link is focused on. A coordinate is set the origin at position of the passive wheel of
th link, and let the
X axis and the
Y axis are on its propulsive direction and normal direction of the passive wheel respectively. Let
and
are an intercept of the axial of the passive wheel of
th link and the one of
th link respectively. The axials of the passive wheels of all
th,
th and
th link intersect at a common point, if
. It is proven that equations of the intercepts on that situation equals to (
15).
Figure 7 depicts the axials of all
th,
th and
th link.
The position of the passive wheel of
th link is
Since a slope of the
th link equals
, a slope of the axial of the passive wheel is follow:
Hence, the intercept of the passive wheel of the
th link
is
Also, the intercept of the passive wheel of the
th link
is
By multiplying
to the both side,
The axials of all passive wheel intersect at a common point when
, (
17). Since (
17) equals (
15), the axials of passive wheel of all non side-slipping links intersect at a common point when the snake-like robot is singular.
When
, (
15) equals (
17) at 0. Since
represents the axials of the passive wheel of non side-slipping link are parallel, the axials of passive wheel of all non side-slipping links are parallel when the snake-like robot is singular. □
5. Numerical Simulation
It has been so far identified as following two conditions. One is that the axials of all passive wheel intersect at a point. Another is that the axials of all passive wheel are parallel. To show the singular configuration particularly, this section visualizes the singular configuration via two simulations. According to the analysis process in this paper, first simulation verifies that the singaular configuration of the snake-like robot depends on the designable parameters as well as the state vector. Second simulation verifies that the singular configuration of the snake-like robot is able to be characterized by axials of the passive wheels of all non side-slipping links. Both simulations analyze both the snake-like robot including side-slipping and the one with non side-slipping, and performed by MaTX VC version 5.3.45 [
37]. The designable parameters used in the both simulations is shown in
Table 3.
The first simulation visualizes the state vectors of the singular configuration in the state coordinate space. The state vectors of the singular configuration of the both 3-link and 4-link snake-like robot with non side-slipping are calculated by solving (
11). In addition, the state vectors of the singular configuration of the 4-link snake-like robot including side-slipping are calculated by solving (
15).
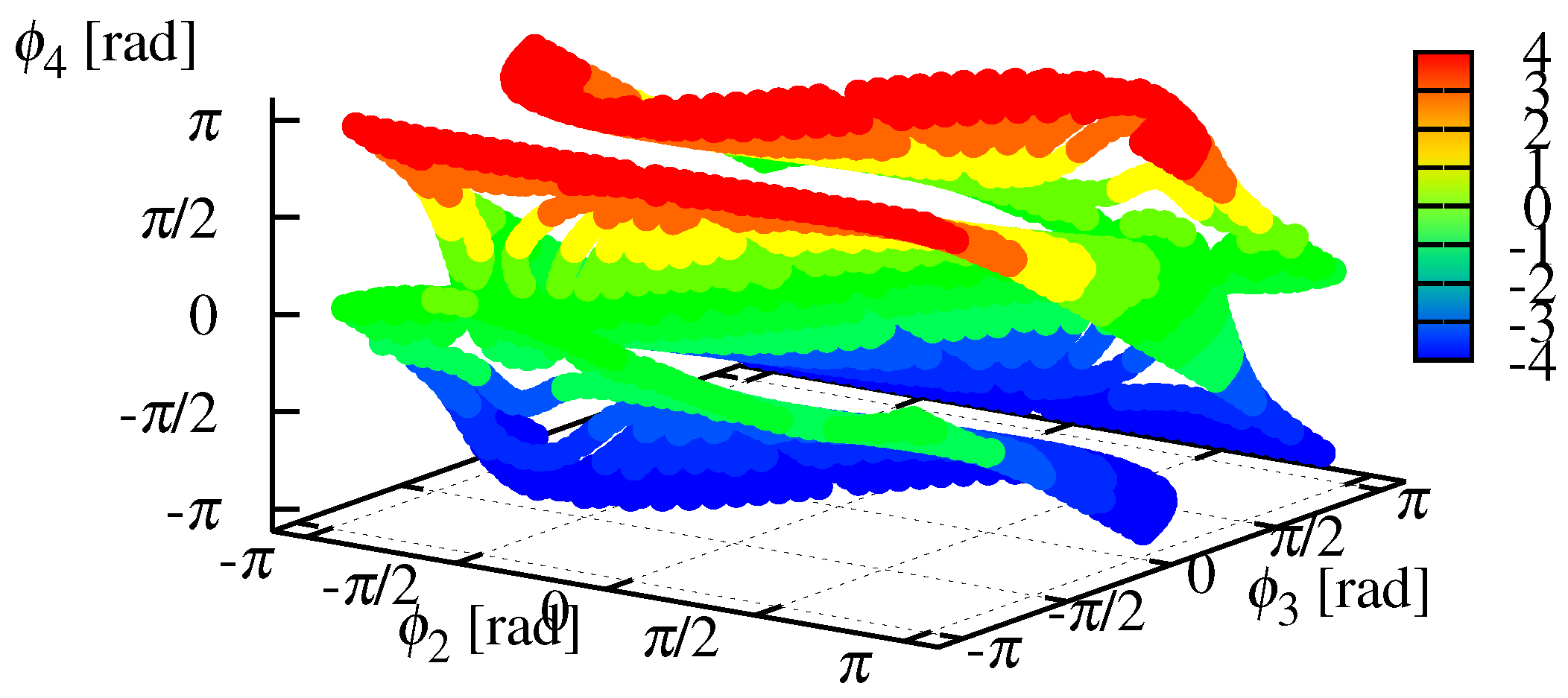
Figure 8 and
Figure 9 show the relative angles on the singular configuration in the state coordinate space. Red shows singular configuration with
m and
m (Case 1 in
Table 3). This configuration has been defined as singular configuration in the previous studies. In fact, red shows state values of either straight line or arc shape. If the singular configuration is either straight line or arc shape—i.e., it depends on the state values only, the relative angles in the state coordinate space are unchanged even if the designable parameters are changed. However, green and blue in both
Figure 8 and
Figure 9 are absolutely discord. That is,
Figure 8 and
Figure 9 clearly show that the singular configuration of the snake-like robot depends on the designable parameters as well as the state values.
Figure 10 and
Figure 11 show the relative angles on the singular configuration including side-slipping in the state coordinate space, and these are absolutely discord. Hence,
Figure 10 and
Figure 11 also clearly show that the singular configuration of the snake-like robot depends on the designable parameters as well as the state values. Thus, the designable parameters affect dynamics of the snake-like robot.
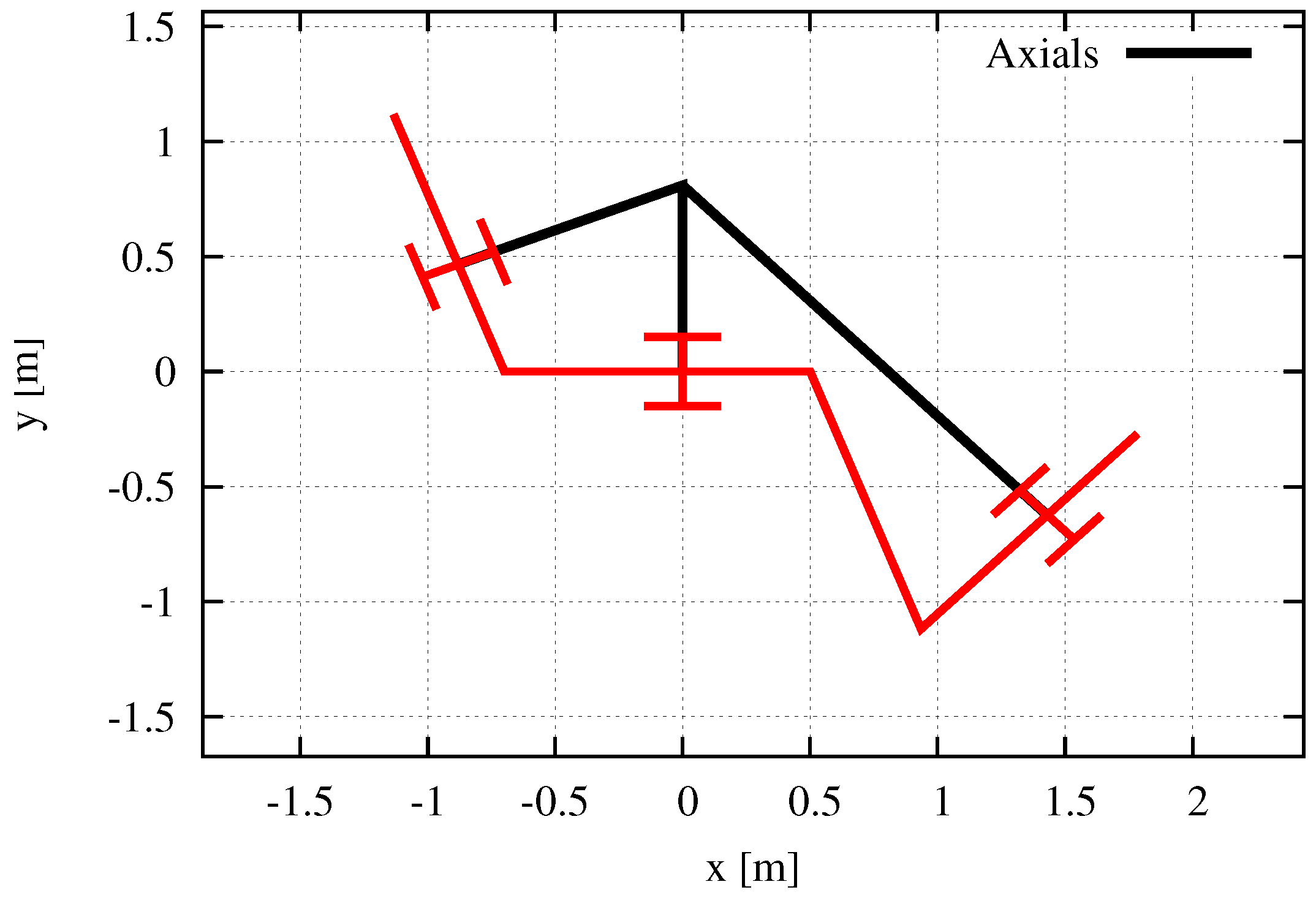
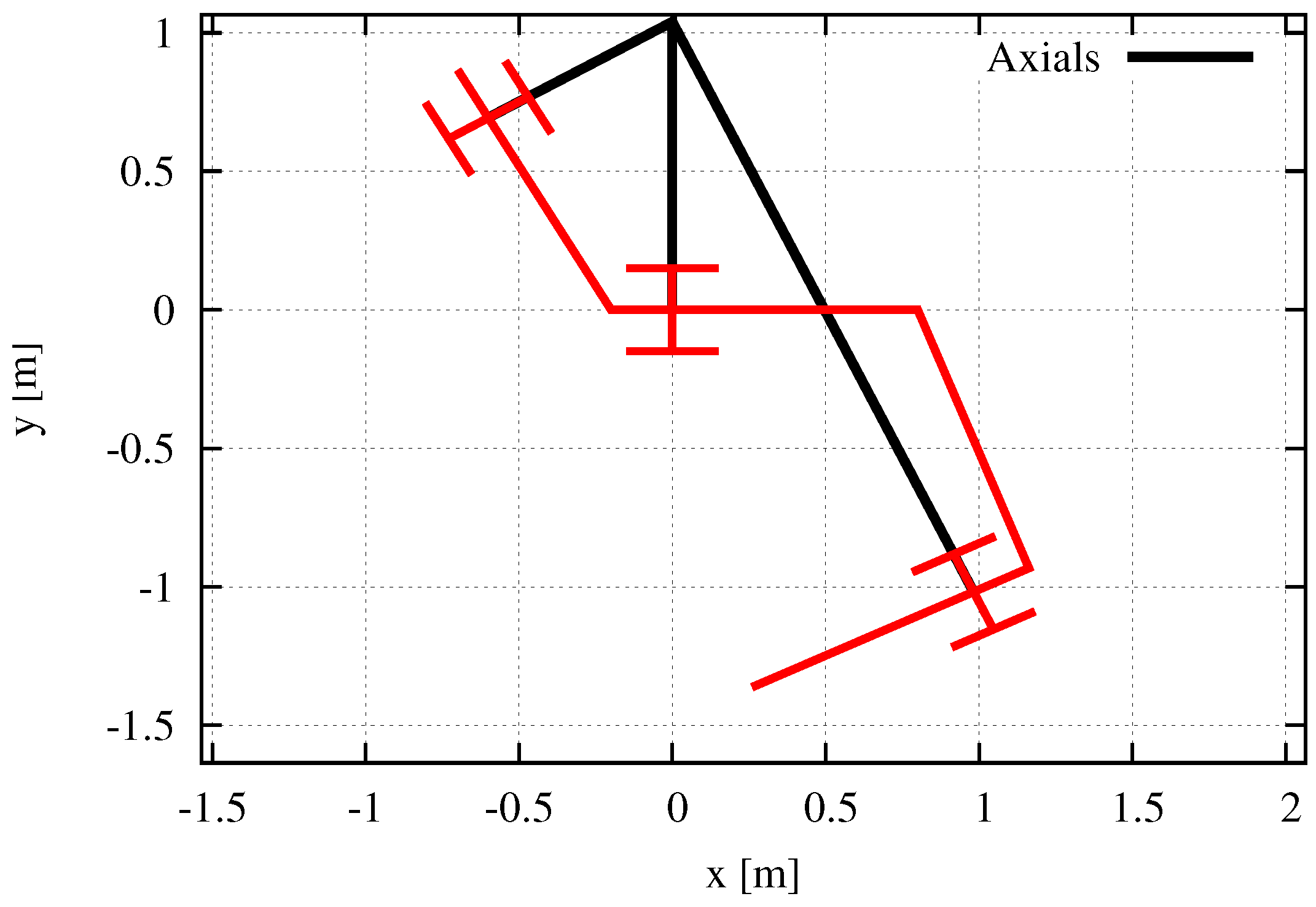
Second simulation shows the axials of the passive wheel of all non side-slipping links intersect at a common point when the snake-like robot is singular. The singular configuration of 4-link snake-like robot is analyzed. Case 2 and Case 3 in
Table 3 are chosen as the designable parameters. Let
rad for Case 2 and
for Case 3, and the intercepts of the axials of the passive wheel and the singular configurations are obtained by solving (
11) and (
14). Simulation results are shown in
Figure 12,
Figure 13,
Figure 14 and
Figure 15.
Figure 12,
Figure 13,
Figure 14 and
Figure 15 shows that the axials of the passive wheel intersect at a common point, when the snake-like robot is singular. Since
rad and
rad in
Figure 12,
rad and
rad in
Figure 13,
rad in
Figure 14 and
rad in
Figure 15, the singular configuration of the snake-like robot is not limited to either straight line or arc shape.
This two simulations has proven that the singular configuration of the snake-like robot depends on the designable parameters as well as the state values, and it is characterized by the intersection of the axials rather than the state values.
6. Conclusions
This paper has elucidated the generalized singularity analysis of the snake-like robot affected by the designable parameters such as the link length and/or the position of the passive wheel. This paper has addressed the model installing the passive wheel on arbitrary position, while the previous studies had addressed the model installing the wheel on the center of each link.
By applying the method using redundancy of the snake-like robot, we have reduced high complexity due to different set-up corresponding to the non-unique designable parameters such as link length and/or the position of the passive wheel. First, the kinematics around a joint of two adjacent links installing the passive wheel on arbitrary position have been derived corresponding to four patterns of side-slipping. By composing the joint kinematics redundantly, the kinematics of whole snake-like robot is formulated. Second, the Jacobian matrices of both the one including side-slipping and the one with non side-slipping have been formulated by using the kinematics. Finally, the rank deficient conditions of the Jacobian matrices—i.e., the singular configuration of the snake-like robot have been analyzed.
The analysis creates two contributions. The first contribution is that the singular configuration depends on the designable parameters such as link length and/or the position of the passive wheel as well as the state vector consisted of the relative angles. Theorem 1 and 3 have revealed the relation between the singular configuration of the snake-like robot and the designable parameters, while the previous studies have reported that the singular configuration depends on only the state vector. The second contribution is that the singular configuration of the snake-like robot is able to be characterized by the axials of the passive wheel of all non side-slipping link. Theorem 2 and 4 have proven that the singular configuration of the snake-like robot is identified as the following two conditions regardless of whether the side-slippings actually exist.
These analyses lead shows discussions on the system design in the previous studies was insufficient. Conversely, this paper has shown importance, necessity and possibility of the discussion with respect to the system design including the locomotion control system as well as the designable parameters in the area of the snake-like robot. The discussion of the system design has a lot of possibilities to be a new index of mechanical design. For example in the area of the snake-like robot, we will be able to design a robot which is unlikely to result in the singular configuration as well as a novel locomotion control system. For another instance, the discussion will lead to invent a novel snake-like robot which can control the position of passive wheels actively. Also for another robotic system, the discussion helps robot’s mechanical design corresponding to its intended use. Especially for unstable system, the discussion contributes to maximize its stability region.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}