Optimization Analysis of the Energy Management Strategy of the New Energy Hybrid 100% Low-Floor Tramcar Using a Genetic Algorithm

Abstract
:1. Introduction
2. Building of the Simulation Model
2.1. Parameters of the Prototype Train
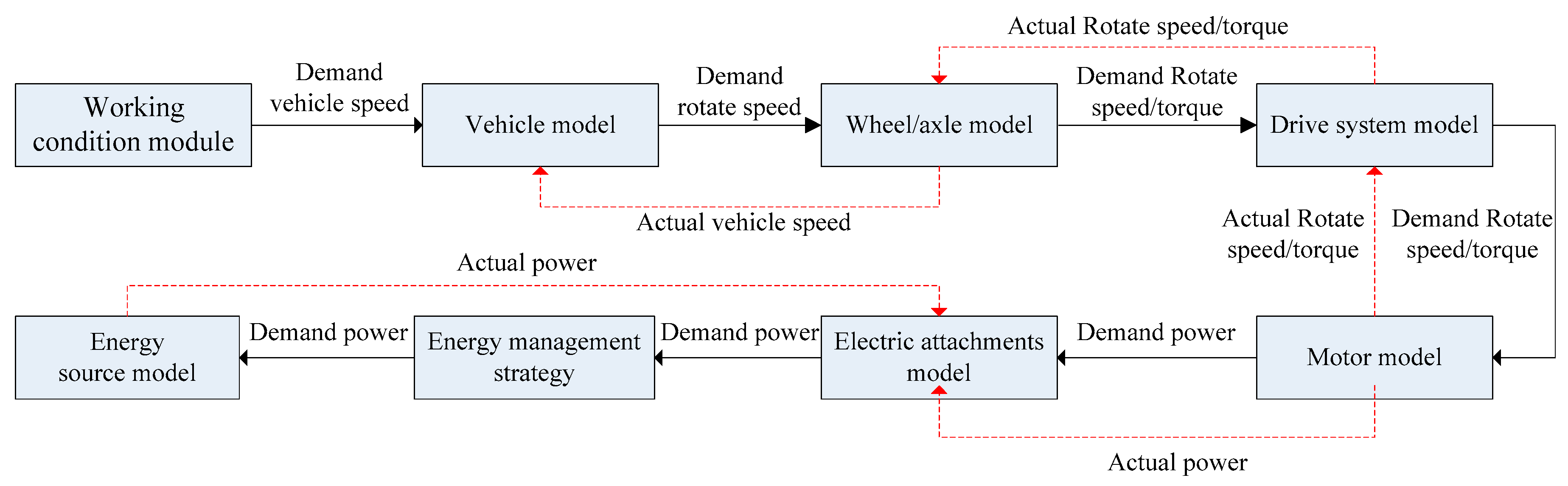
2.2. Building of the Numerical Model
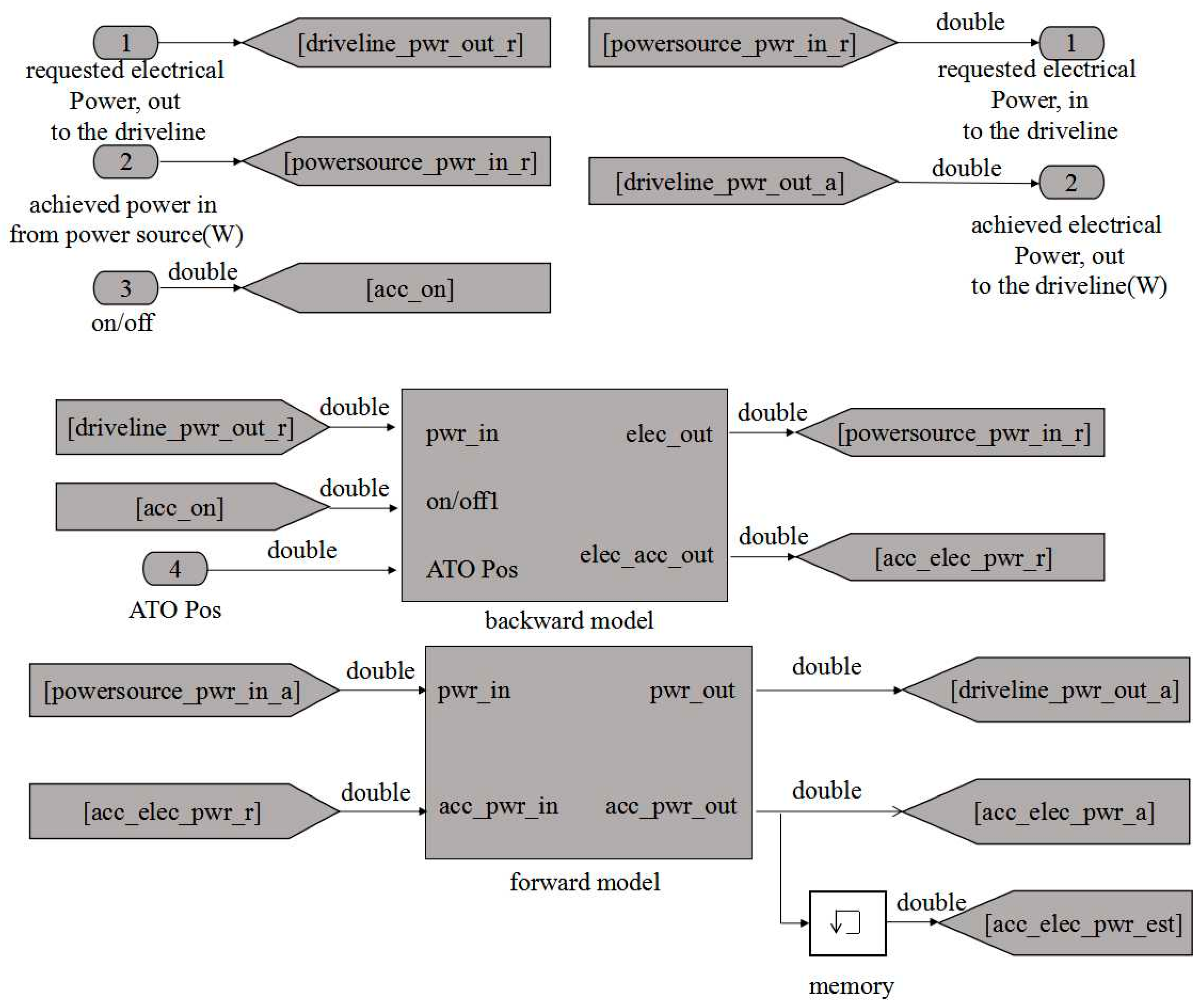
2.2.1. Electric Auxiliary System Module
2.2.2. Power Bus Module
2.2.3. The Train Traction Module
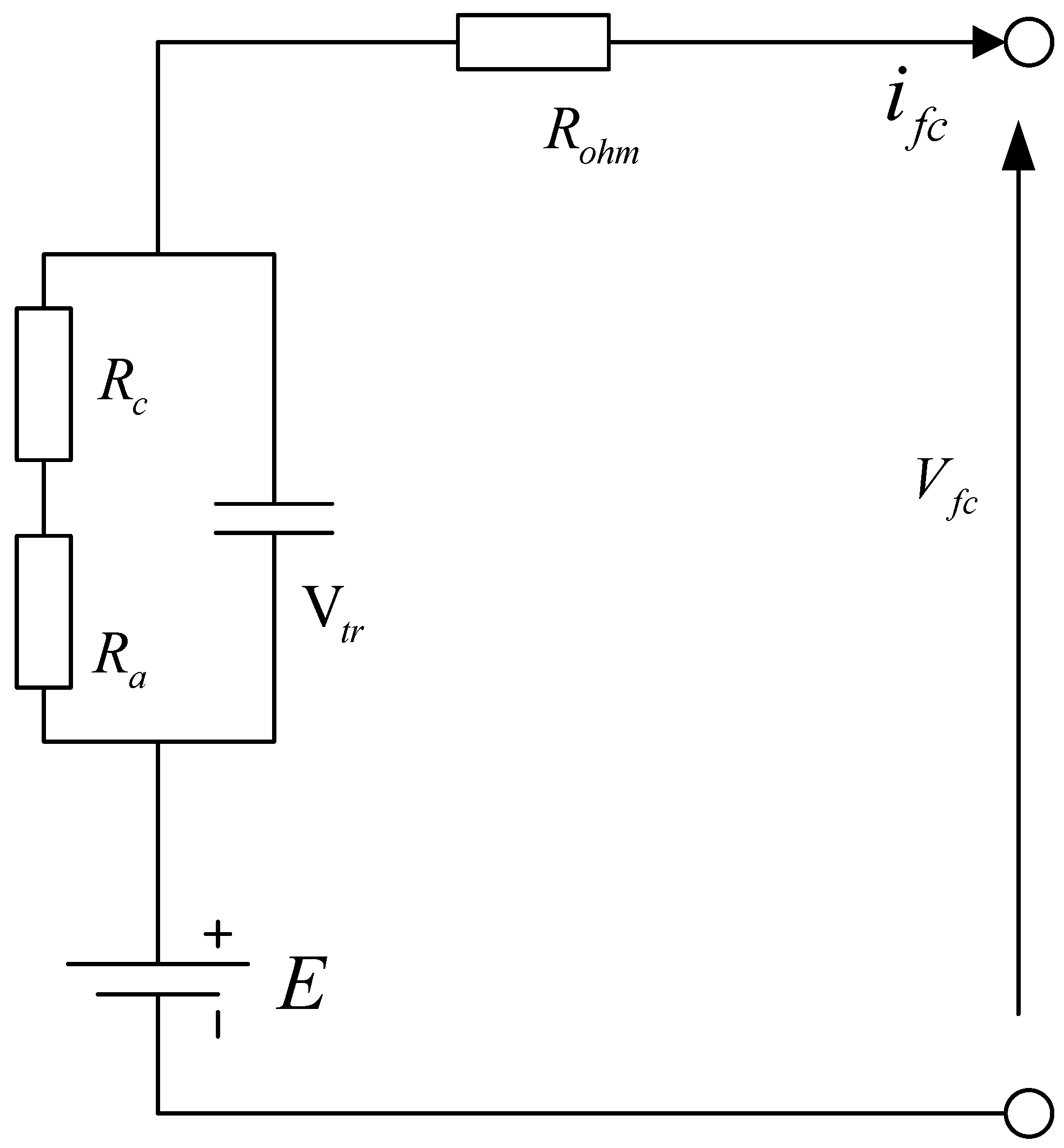
2.2.4. Energy Storage System Module
- (1)
- Assuming that the working temperature of the FC stack is constant (the response time of the FC to temperature is about 102 s).
- (2)
- Assuming that both the anode and cathode of the fuel cell are well humidified, which means the humidity management is considered to be OK.
- (3)
- Assuming that the liquid water will not leave the stack, which means the water management is considered to be OK.
- (4)
- Assuming that the humidifier and temperature controller work in a reasonable range, which means temperature management is considered to be OK.
3. Simulation Calculation Based on the Original Energy Management Strategy
3.1. The Original Energy Management Strategy
3.2. Simulation Results and Analysis
- (1)
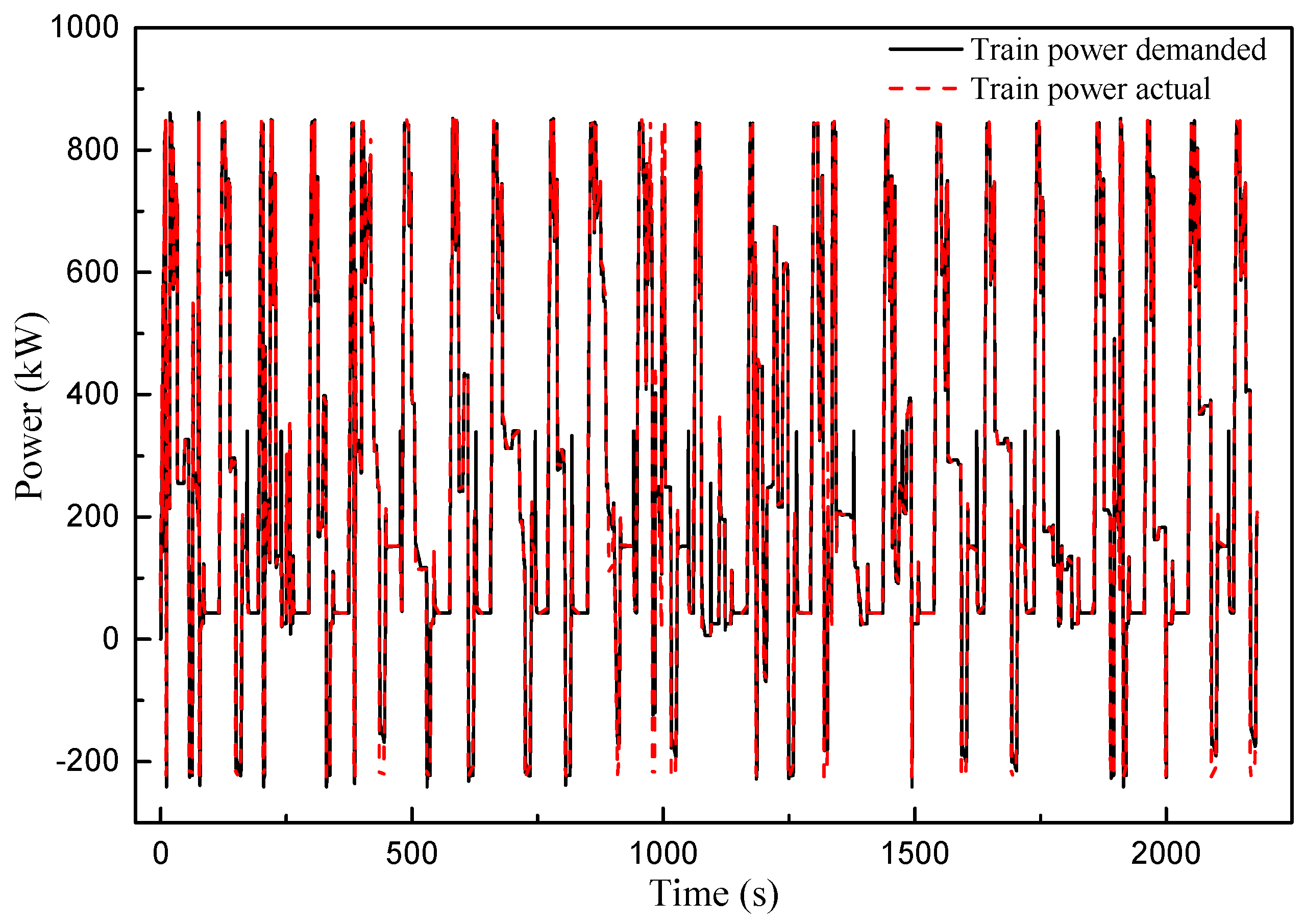
- The energy configuration and energy management strategy of the new energy hybrid tramcar can meet the operational requirements of the experimental line;
- (2)
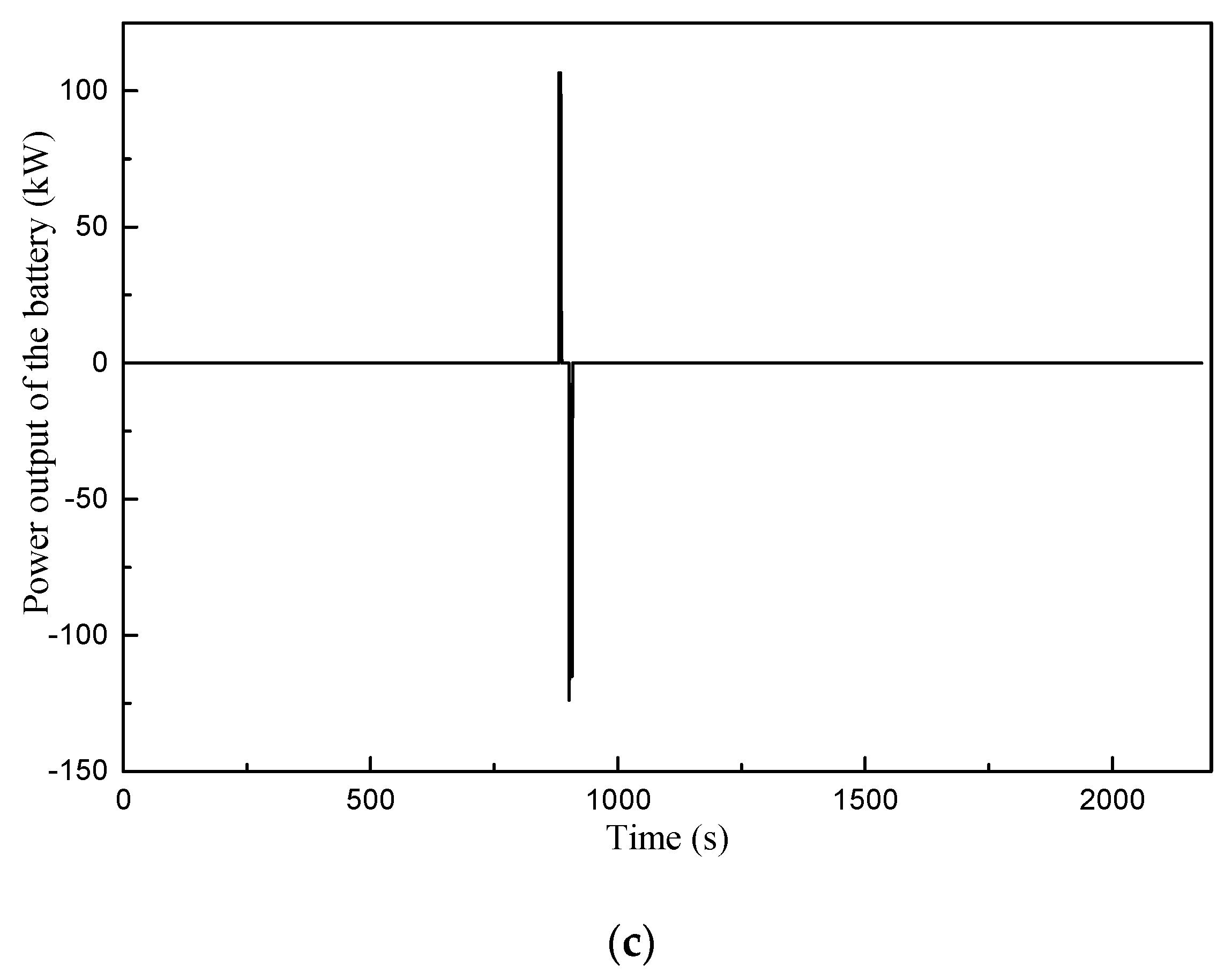
- The battery has not been used effectively during the traction stage of the train;
- (3)
- The regenerative braking energy loss is great in the braking stage.
4. Optimization of the Energy Management Strategy
4.1. Selection of Optimization Method
4.2. Optimization of Energy Distribution Strategy Based on Genetic Algorithm
4.2.1. Target Fitness Function
4.2.2. Process of Energy Allocation Strategy Optimization
4.3. Simulation Calculation and Analysis of Optimization Strategy
5. Conclusions
- (1)
- A simulation model was built based on the FC/battery/SC hybrid 100% low-floor tramcar, which can be used to predict the performance and fuel consumption of the new energy hybrid system.
- (2)
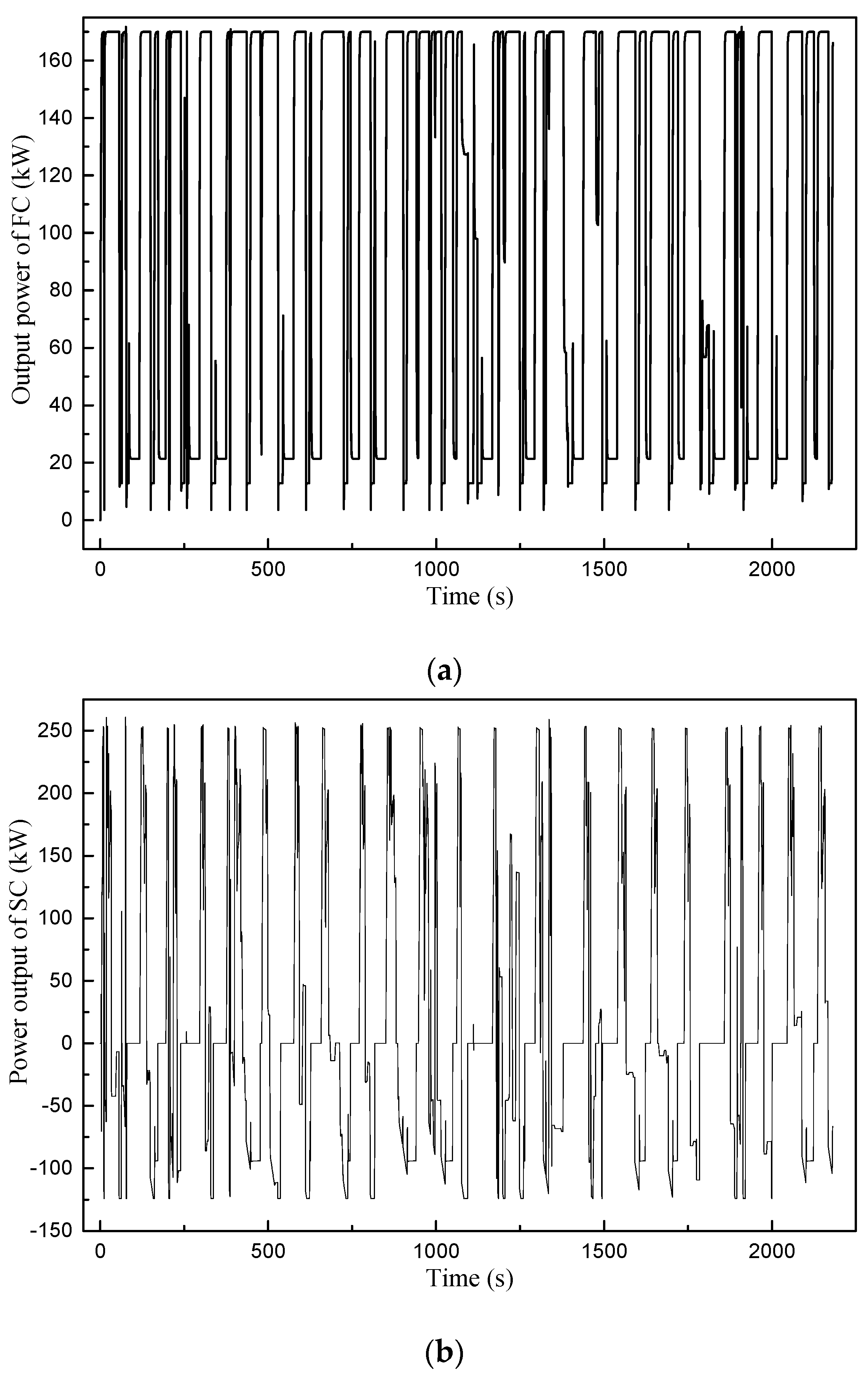
- Under the original energy management strategy, the fuel consumption of the energy storage system is relatively high with a low capacity utilization ratio. The FC module never stops during the whole process, with a maximum output power of 170 kW. The power range of the super capacitor is −125 kW to 250 kW, which is the result of the charge current being three-sevenths of the discharge current. The battery was not used efficiently for its tiny exporting and absorbent energy. The equivalent energy consumption is 3.3469 kg for the whole line simulation.
- (3)
- The genetic algorithm can be used to realize the optimization solution of the energy management strategy. The optimal objects are set as the maximum output power of the FC P_disch_fc, battery P_disch_bt, and SC P_disch_uc. The maximum fitness value corresponding to the minimum fuel consumption and the algorithm converged when the optimal solution remained unchanged.
- (4)
- The optimized energy management strategy can improve the economic efficiency of the new energy hybrid tramcar. The maximum output power of the FC dropped to 101.2 kW and never stopped during the whole running process. The SC module is reduced from 3-in parallel to 2-in parallel, and its output power drops to −67 kW to 153 kW. As for the battery, the use ratio is improved greatly by exporting and absorbing more energy. The equivalent energy consumption is 2.8354 kg for the whole line simulation, which is a reduction of 15% compared to the original strategy.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FC | Fuel Cell |
| SC | Super Capacitor |
| HC | Hydrocarbon |
| PM | Particular matter |
| ECMS | Equivalent Consumption Minimization Strategy |
| SOC | State of Charge |
| ESS | Electronic Switching System |
| ADVISOR | Advanced Vehicle Simulator |
| PEMFC | Proton Exchange Membrane Fuel Cell |
| KVL | Kirchhoff’ s Voltage Law |
References
- Liu, Z.N. Design of Energy-Saving Oriented Case Database Construction of Metro Diagram. Ph.D. Thesis, Nanjing University of Science and Technology, Nanjing, China, 2016. [Google Scholar]
- Kong, L.Y.; Liang, Q.H.; Zhang, Y. Study on traction energy consumption of linear induction motor rail transit system. J. China Railw. Soc. 2007, 29, 106–112. [Google Scholar]
- Feng, L. Analysis on optimization design and thermodynamic performance of solar aided power Generation System. Ph.D. Thesis, North China Electric Power University, Beijing, China, 2016. [Google Scholar]
- Wang, Z.; Zhu, Y.; Zhu, Y.; Shi, Y. Energy structure change and carbon emission trends in China. Energy 2016, 115, 369–377. [Google Scholar] [CrossRef]
- Chen, W.; Ma, T.C. Patent information analysis on circulating fluidized bed. Sci. Technol. Manag. Res. 2015, 329, 146–151. [Google Scholar]
- Madrazo, J.; Clappier, A. Low-cost methodology to estimate vehicle emission factors. Atmos. Pollut. Res. 2017, 9, 323–332. [Google Scholar] [CrossRef]
- Ferrero, E.; Alessandrini, S.; Balanzino, A. Impact of the electric vehicles on the air pollution from a highway. Appl. Energy 2016, 169, 450–459. [Google Scholar] [CrossRef]
- Weerakkody, U.; Dover, J.W.; Mitchell, P.; Reiling, K. Particulate matter pollution capture by leaves of seventeen living wall species with special reference to rail-traffic at a metropolitan station. Urban For. Urban Green. 2017, 27, 173–186. [Google Scholar] [CrossRef]
- Molavian, M.R.; Abdolmaleki, A.; Gharibi, H.; Tadavani, K.F.; Zhiani, M. Two highly strong semi-IPNs for proton exchange membrane fuel cell (PEMFC) application. Mater. Today Commun. 2018, 15, 94–99. [Google Scholar] [CrossRef]
- Devi, A.U.; Divya, K.; Kaleekkal, N.J.; Rana, D.; Nagendran, A. Tailored SPVdF-co-HFP/SGO nanocomposite proton exchange membranes for direct methanol fuel cells. Polymer 2018, 140, 22–32. [Google Scholar] [CrossRef]
- Wang, J.; Gong, C.; Wen, S.; Liu, H.; Qin, C.; Xiong, C.; Dong, L. Proton exchange membrane based on chitosan and solvent-free carbon nanotube fluids for fuel cells applications. Carbohydr. Polym. 2018, 186, 200–207. [Google Scholar] [CrossRef] [PubMed]
- Gheorghita, A.; Mihai, L.; Magda, F. Optimization of the proton exchange membrane fuel cell hybrid power system for residential buildings. Energy Convers. Manag. 2018, 163, 22–37. [Google Scholar]
- Ziemann, S.; Müller, D.B.; Schebek, L.; Weil, M. Modeling the potential impact of lithium recycling from EV batteries on lithium demand: A dynamic MFA approach. Resour. Conserv. Recycl. 2018, 133, 76–85. [Google Scholar] [CrossRef]
- Ogura, K. 5-Next-generation battery-driven light rail vehicles and trains. Electr. Veh. Prospect. Chall. 2017, 169–206. [Google Scholar] [CrossRef]
- Xu, X.; Nan, J.; Wang, J.; Gao, Z. Estimate of Super Capacitor’s Dynamic Capacity. Energy Procedia 2017, 105, 2194–2200. [Google Scholar] [CrossRef]
- Capasso, C.; Veneri, O. Integration between Super-capacitors and ZEBRA Batteries as High Performance Hybrid Storage System for Electric Vehicles. Energy Procedia 2017, 105, 2539–2544. [Google Scholar] [CrossRef]
- Li, Q.; Wang, T.; Dai, C.; Chen, W.; Ma, L. Power Management Strategy based on Adaptive Droop Control for a Fuel Cell-Battery-Supercapacitor Hybrid Tramway. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- Han, Y.; Li, Q.; Wang, T.; Chen, W.; Ma, L. Multi-source Coordination Energy Management Strategy based on SOC consensus for a PEMFC-Battery-Supercapacitor Hybrid Tramway. IEEE Trans. Veh. Technol. 2017, 67, 296–305. [Google Scholar] [CrossRef]
- Zhang, G.; Chen, W.; Li, Q. Modeling optimization and control of a FC/battery hybrid locomotive based on ADVISOR. Int. J. Hydrog. Energy 2017, 42, 18568–18583. [Google Scholar] [CrossRef]
- Wang, Y.X.; Kai, O.; Kim, Y.B. Modeling and experimental validation of hybrid proton exchange membrane fuel cell/battery system for power management control. Int. J. Hydrog. Energy 2015, 40, 11713–11721. [Google Scholar] [CrossRef]
- Li, Q.; Chen, W.; Liu, Z.; Li, M.; Ma, L. Development of energy management system based on a power sharing strategy for a fuel cell-battery-supercapacitor hybrid tramway. J. Power Sources 2015, 279, 267–280. [Google Scholar] [CrossRef]
- El Fadil, H.; Giri, F.; Guerrero, J.M.; Tahri, A. Modeling and nonlinear control of a fuel cell/Supercapacitor hybrid energy storage system for electric vehicles. IEEE Trans. Veh. Technol. 2014, 63, 3011–3018. [Google Scholar] [CrossRef]
- Wu, C.; Chen, J.; Xu, C.; Liu, Z. Real-time Adaptive Control of a Fuel Cell-Battery Hybrid Power System with Guaranteed Stability. IEEE Trans. Control Syst. Technol. 2016, 25, 1394–1405. [Google Scholar] [CrossRef]
- Li, Q.; Yang, H.; Han, Y.; Li, M.; Chen, W. A state machine strategy based on droop control for an energy management system of PEMFC-battery-supercapacitor hybrid tramway. Int. J. Hydrog. Energy 2016, 41, 16148–16159. [Google Scholar] [CrossRef]
- Zhou, D.; Ravey, A.; Al-Durra, A.; Gao, F. A comparative study of extremum seeking methods applied to online energy management strategy of fuel cell hybrid electric vehicles. Energy Convers. Manag. 2017, 151, 778–790. [Google Scholar] [CrossRef]
- Tian, H.; Li, S.E.; Wang, X.; Huang, Y.; Tian, G. Data-driven hierarchical control for online energy management of plug-in hybrid electric city bus. Energy 2018, 142, 55–67. [Google Scholar] [CrossRef]
- Duchaud, J.L.; Notton, G.; Darras, C.; Voyant, C. Power ramp-rate control algorithm with optimal State of Charge reference via Dynamic Programming. Energy 2018, 149, 709–717. [Google Scholar] [CrossRef]
- Aydin, E.; Bonvin, D.; Kai, S. Dynamic optimization of constrained semi-batch processes using Pontryagin’s minimum principle—An effective quasi-Newton approach. Comput. Chem. Eng. 2017, 99, 135–144. [Google Scholar] [CrossRef] [Green Version]
- Dong, H.; Li, T.; Ding, R.; Sun, J. A Novel Hybrid Genetic Algorithm with Granular Information for Feature Selection and Optimization. Appl. Soft Comput. 2018, 65, 33–46. [Google Scholar] [CrossRef]
- Wieczorek, M.; Lewandowski, M. A mathematical representation of an energy management strategy for hybrid energy storage system in electric vehicle and real time optimization using a genetic algorithm. Appl. Energy 2017, 192, 222–233. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Weight/t | 63 (Motor car 22.4, Trailer car 18.2) |
| Transmission ratio | 6.28 |
| Inertia mass coefficient | Motor car 0.1, Trailer car 0.05 |
| Drag coefficient A | 3.06743 |
| Drag coefficient B | 0.02686 |
| Drag coefficient C | 0.00158 |
| Maximum operating speed/km·h−1 | 60 |
| Maximum acceleration/m·s−2 | 1.2 |
| Fuel Cell | |
| Rated efficiency/% | 50 |
| Minimum voltage/V | 440 |
| Maximum output power/kW | 170 |
| Super Capacitor | |
| Nominal voltage/V | 528 |
| Rated capacity/F | 45 |
| Maximum discharge current/A | 700 |
| Maximum charging current/A | 300 |
| End-off-discharge voltage/V | 220 |
| End-off-charge voltage/V | 510 |
| Battery | |
| Nominal voltage/V | 331 |
| Rated capacity/Ah | 20 |
| Discharge Rate/C | 4 |
| Maximum charging current/A | 120 |
| end-off discharge SOC/% | 40 |
| end-off charge SOC/% | 90 |
| Station Number | Position (m) | Platform Length (m) | Stopping Time (s) |
|---|---|---|---|
| 1 | 164 | 64 | 0 |
| 2 | 300 | 0 | 30 |
| 3 | 805 | 64 | 30 |
| 4 | 1231 | 64 | 30 |
| 5 | 1295 | 0 | 30 |
| 6 | 1715 | 0 | 30 |
| 7 | 2070 | 0 | 30 |
| 8 | 1796 | 64 | 30 |
| 9 | 2249 | 64 | 30 |
| 10 | 2320 | 0 | 30 |
| 11 | 2768 | 0 | 30 |
| 12 | 2948 | 64 | 30 |
| 13 | 3438 | 0 | 30 |
| 14 | 3638 | 64 | 30 |
| 15 | 3910 | 0 | 30 |
| 16 | 4110 | 64 | 30 |
| 17 | 4853 | 0 | 30 |
| 18 | 5053 | 64 | 30 |
| 19 | 5315 | 0 | 30 |
| 20 | 5515 | 64 | 30 |
| 21 | 6217 | 64 | 30 |
| 22 | 7014 | 64 | 30 |
| 23 | 7870 | 64 | 30 |
| 24 | 8966 | 64 | 30 |
| 25 | 9316 | 0 | 30 |
| 26 | 10,100 | 0 | 30 |
| 27 | 10,215 | 64 | 30 |
| 28 | 10,500 | 0 | 30 |
| 29 | 10,820 | 0 | 30 |
| 30 | 10,970 | 64 | 30 |
| 31 | 11,230 | 0 | 30 |
| 32 | 11,580 | 0 | 30 |
| 33 | 11,687 | 64 | 30 |
| 34 | 12,274 | 0 | 30 |
| 35 | 12,424 | 64 | 30 |
| 36 | 12,650 | 0 | 30 |
| 37 | 13,440 | 0 | 30 |
| 38 | 13,450 | 64 | 30 |
| 39 | 13,857 | 0 | 30 |
| 40 | 14,067 | 64 | 30 |
| 41 | 14,628 | 64 | 30 |
| 42 | 15,026 | 0 | 30 |
| 43 | 15,226 | 64 | 30 |
| 44 | 15,658 | 64 | 30 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, M.; Han, G.; Liu, N.; Zhang, Q.; Wang, Y. Optimization Analysis of the Energy Management Strategy of the New Energy Hybrid 100% Low-Floor Tramcar Using a Genetic Algorithm. Appl. Sci. 2018, 8, 1144. https://doi.org/10.3390/app8071144
Li M, Li M, Han G, Liu N, Zhang Q, Wang Y. Optimization Analysis of the Energy Management Strategy of the New Energy Hybrid 100% Low-Floor Tramcar Using a Genetic Algorithm. Applied Sciences. 2018; 8(7):1144. https://doi.org/10.3390/app8071144
Chicago/Turabian StyleLi, Minggao, Ming Li, Guopeng Han, Nan Liu, Qiumin Zhang, and Yiou Wang. 2018. "Optimization Analysis of the Energy Management Strategy of the New Energy Hybrid 100% Low-Floor Tramcar Using a Genetic Algorithm" Applied Sciences 8, no. 7: 1144. https://doi.org/10.3390/app8071144