A Hybrid State Estimator Based on SCADA and PMU Measurements for Medium Voltage Distribution System




Abstract
:1. Introduction
- (1)
- To solve the problems of measurements with different refresh frequencies, a hybrid state estimator based on the improved state estimation and LSE is proposed, which makes full use of the PMU measurements to fast track distribution system states and guarantee the timeliness of real-time measurements.
- (2)
- To eliminate the influence of the bad data, the normalized residuals and adaptive thresholds are introduced to improve the conventional robust estimation method. Furthermore, the performance of the improved robust estimation method is compared with other robust estimation methods.
2. Multi-Sampling Period Data Fusion in the Distribution System
3. A Hybrid State Estimator Based on SCADA and PMU Measurements
3.1. State Variables and Measurement Equations in Robust State Estimation
3.2. The Improved Robust State Estimation with Normalized Residuals and Adaptive Thresholds
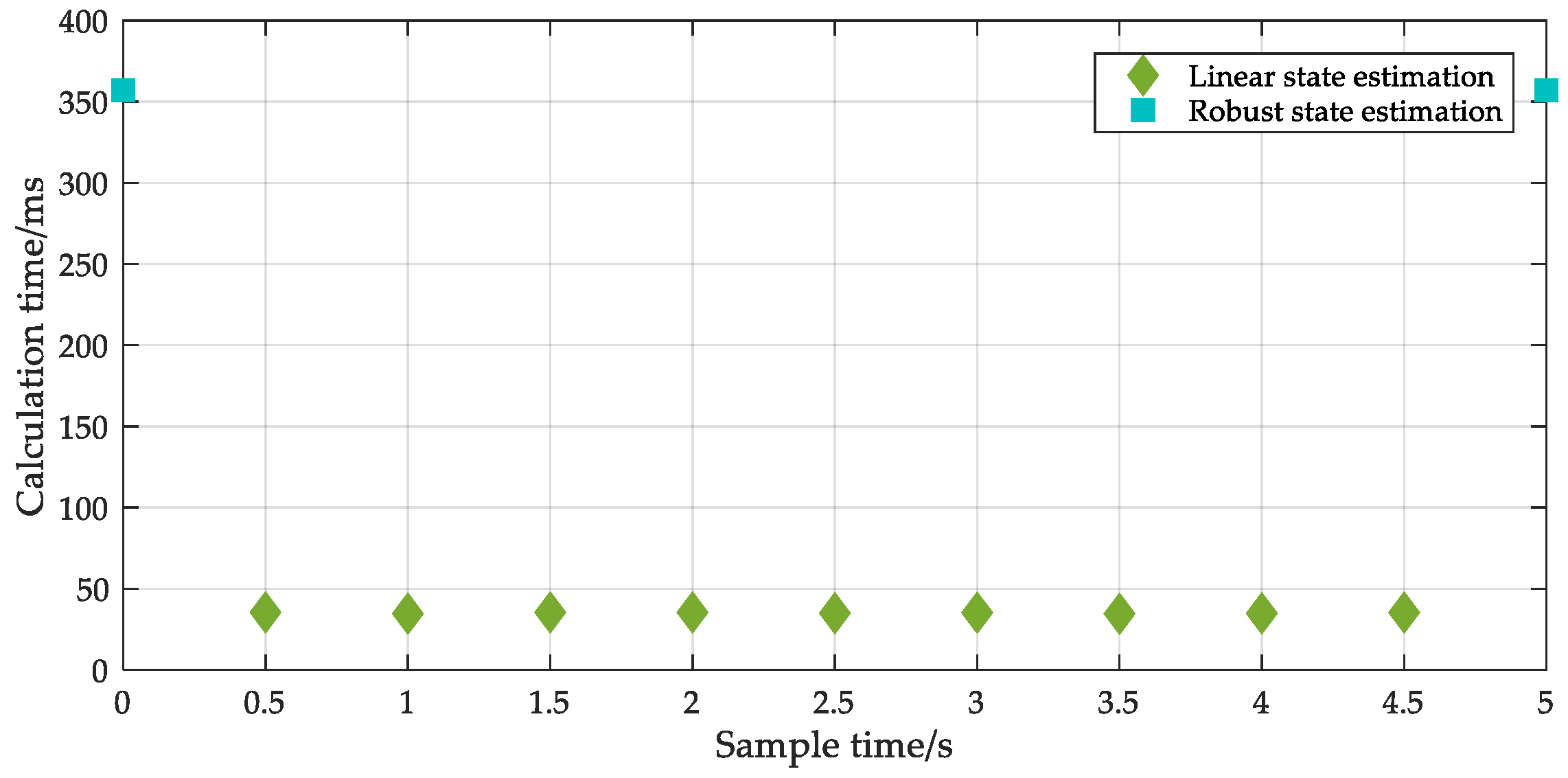
3.3. Fast-State Tracking with PMUs Based on the Linear State Estimation
4. Case Studies
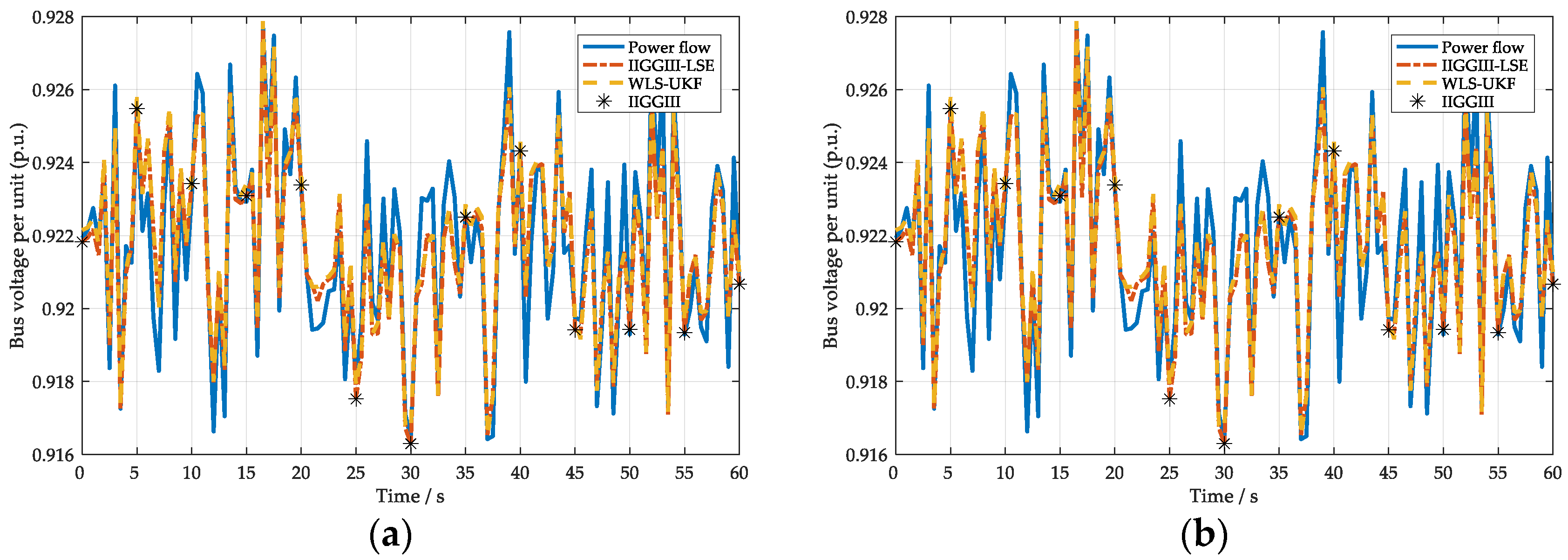
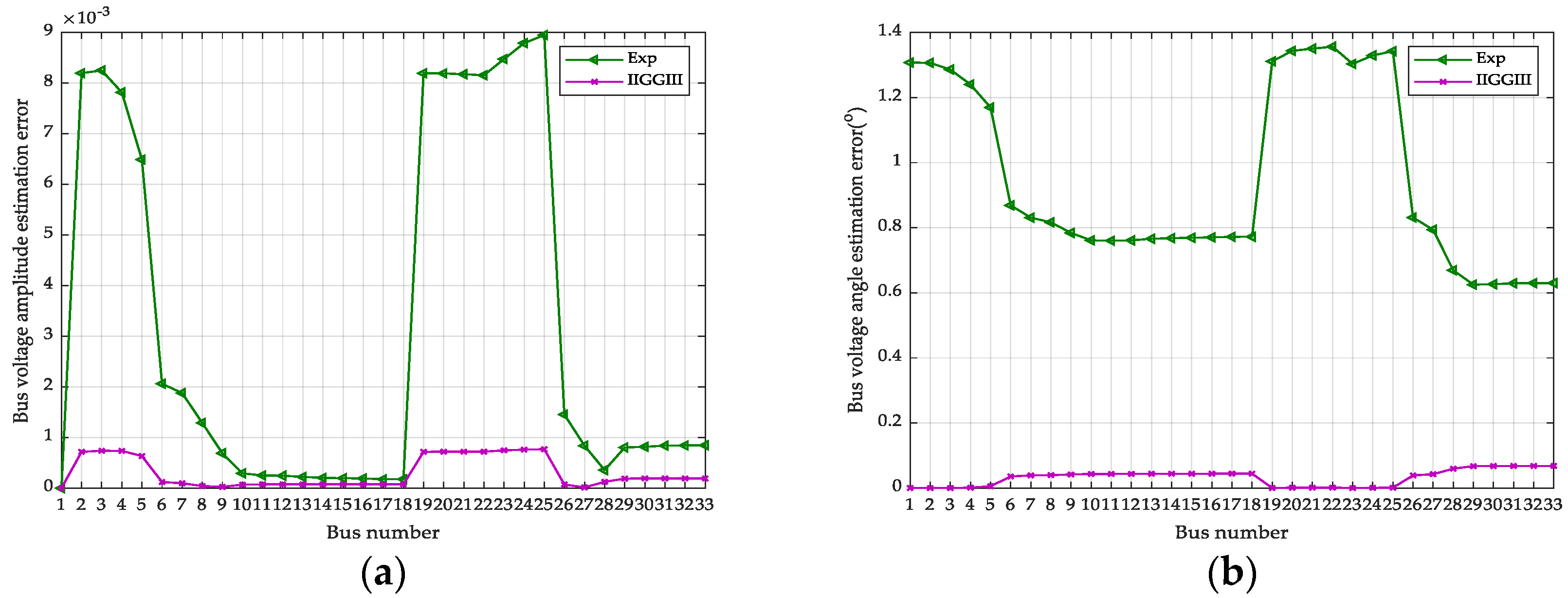
4.1. Comparison of State Estimation Results under the Normal Condition
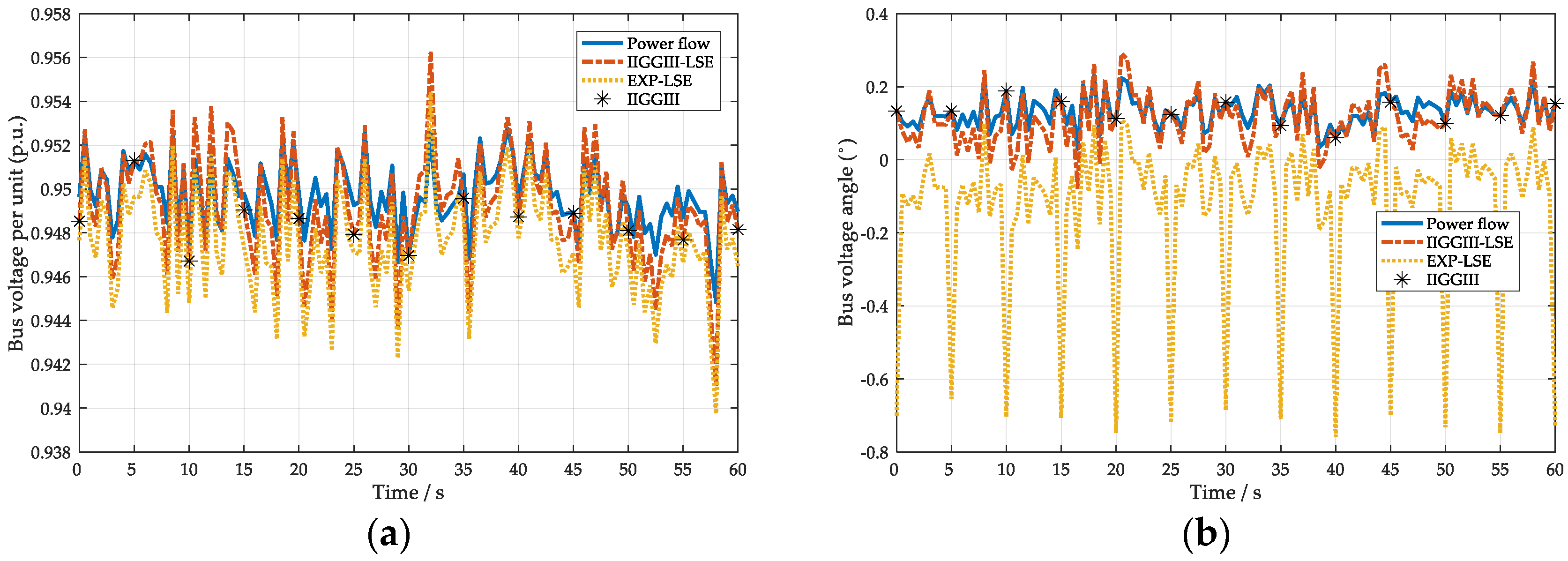
4.2. Comparison of State Estimation Results under the Bad Data Condition
5. Conclusions
- (1)
- Using the PMU measurements in the DSSE was necessary and fast-state tracking with LSE could guarantee the timeliness of real-time measurements and avoid the waste of the PMU measurements. However, the estimation results would be less accurate if the estimated bus or area was far from the installation of the PMUs.
- (2)
- The normalized residuals and adaptive thresholds could improve the estimation robustness of dealing with the bad data in real-time measurements.
- (3)
- The proposed hybrid state estimator could effectively converge and quickly track the system states while ensuring the estimation accuracy.
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Cataliotti, A.; Cosentino, V.; Cara, D.D.; Pierluca, R.; Enrico, T.; Giovanni, T. An Innovative Measurement Approach for Load Flow Analysis in MV Smart Grids. IEEE Trans. Smart Grid 2016, 7, 889–896. [Google Scholar] [CrossRef]
- Prasad, S.; Kumar, D.M.V. Optimal Allocation of Measurement Devices for Distribution State Estimation Using Multiobjective Hybrid PSO-Krill Herd Algorithm. IEEE Trans. Instrum. Meas. 2017, 66, 2022–2035. [Google Scholar] [CrossRef]
- Primadianto, A.; Lu, C.N. A Review on Distribution System State Estimation. IEEE Trans. Power Syst. 2016, 32, 1–6. [Google Scholar] [CrossRef]
- Tosato, P.; Macii, D.; Luiso, M.; Davide, B.; Daniele, G.; Carmine, L. A Tuned Lightweight Estimation Algorithm for Low-Cost Phasor Measurement Units. IEEE Trans. Instrum. Meas. 2018, 67, 1047–1057. [Google Scholar] [CrossRef]
- Wu, Z.J.; Xu, J.; Yu, X.H.; Dou, X.; Gu, W. Review on State Estimation Technology of Active Distribution Network. Autom. Electr. Power Syst. 2017, 41, 182–191. [Google Scholar] [CrossRef]
- Wang, B.; Sun, H.; Zhang, D. Review on Data Sharing and Synchronized Phasor Measurement Technique with Application in Distribution Systems. Proc. CSEE 2015, 35, 1–7. [Google Scholar] [CrossRef]
- Cataliotti, A.; Cosentino, V.; Cara, D.D.; Giovanni, T. LV Measurement Device Placement for Load Flow Analysis in MV Smart Grids. IEEE Trans. Instrum. Meas. 2016, 65, 999–1006. [Google Scholar] [CrossRef]
- Damavandi, M.G.; Krishnamurthy, V.; Martí, J.R. Robust Meter Placement for State Estimation in Active Distribution Systems. IEEE Trans. Smart Grid 2015, 6, 1972–1982. [Google Scholar] [CrossRef]
- Castello, P.; Ferrari, P.; Flammini, A.; Carlo, M.; Paolo, A.P.; Stefano, R. A Distributed PMU for Electrical Substations with Wireless Redundant Process Bus. IEEE Trans. Instrum. Meas. 2015, 64, 1149–1157. [Google Scholar] [CrossRef]
- Parvez, B.; Ali, J.; Ahmed, U.; Muhammad, F. Framework for implementation of AGA 12 for secured SCADA operation in Oil and Gas Industry. In Proceedings of the 2nd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 11–13 March 2015; pp. 1281–1284. [Google Scholar]
- Chenine, M.; Nordstrom, L. Modeling and Simulation of Wide-Area Communication for Centralized PMU-Based Applications. IEEE Trans. Power Deliv. 2011, 26, 1372–1380. [Google Scholar] [CrossRef] [Green Version]
- Chin, W.L.; Li, W.; Chen, H.H. Energy Big Data Security Threats in IoT-Based Smart Grid Communications. IEEE Commun. Mag. 2017, 55, 70–75. [Google Scholar] [CrossRef]
- Meloni, A.; Pegoraro, P.A.; Atzori, L.; Benigni, A.; Sulis, S. Cloud-based IoT solution for State Estimation in Smart Grids: Exploiting virtualization and edge-intelligence technologies. Comput. Netw. 2017, 130, 156–165. [Google Scholar] [CrossRef]
- Chawasak, R.; Sermsak, U.; Suttichai, P. State estimation of power system considering network parameter uncertainty based on parametric interval linear systems. IEEE Trans. Power Syst. 2012, 27, 305–313. [Google Scholar] [CrossRef]
- Brinkmann, B.; Negnevitsky, M. A Probabilistic Approach to Observability of Distribution Networks. IEEE Trans. Power Syst. 2016, 32, 1169–1178. [Google Scholar] [CrossRef]
- Wei, Z.; Yan, Q.; Sun, G.; Ni, M. Power System Interval Linear State Estimation Considering Network Parameter Uncertainty. Power Syst. Technol. 2015, 2, 99–110. [Google Scholar] [CrossRef]
- Xu, J.; Wu, Z.; Hu, Q.; Xu, Y.Y.; Dou, X.B.; Gu, W. Interval State Estimation Considering Uncertainties of Multiple Types of DGs and Loads in Active Distribution Networks. Proc. CSEE 2017, 29, 1–12. [Google Scholar] [CrossRef]
- Pau, M.; Pegoraro, P.A.; Sulis, S. Branch current state estimator for distribution system based on synchronized measurements. In Proceedings of the IEEE International Workshop on Applied Measurements for Power Systems (AMPS) Proceedings, Aachen, Germany, 26–28 September 2012; pp. 1–6. [Google Scholar]
- Pau, M.; Pegoraro, P.A.; Sulis, S. Efficient branch-current-based distribution system state estimation including synchronized measurements. IEEE Trans. Instrum. Meas. 2013, 62, 2419–2429. [Google Scholar] [CrossRef]
- Liu, J.; Tang, J.; Ponci, F.; Monti, A.; Muscas, C.; Paolo, A.P. Trade-offs in PMU deployment for state estimation in active distribution grids. IEEE Trans. Smart Grid 2012, 3, 915–924. [Google Scholar] [CrossRef]
- Gómez-Expósito, A.; Gómez-Quiles, C.; Džafic, I. State estimation in two time scales for smart distribution system. IEEE Trans. Smart Grid 2015, 6, 421–430. [Google Scholar] [CrossRef]
- Huang, S.C.; Lu, C.N.; Lo, Y.L. Evaluation of AMI and SCADA Data Synergy for Distribution Feeder Modeling. IEEE Trans. Smart Grid 2015, 6, 1639–1647. [Google Scholar] [CrossRef]
- Wang, S.F.; Liu, G.Y.; Huang, R.L.; Qin, S. State Estimation Method for Active Distribution Networks Under Environment of Hybrid Measurements with Multiple Sampling Periods. Autom. Electr. Power Syst. 2016, 40, 30–36. [Google Scholar] [CrossRef]
- Gol, M.; Abur, A. A hybrid state estimator for systems with limited number of PMUs. IEEE Trans. Power Syst. 2015, 30, 1511–1517. [Google Scholar] [CrossRef]
- Albuquerque, A.; Bez, D.; Simões, A. Multistage strategies to incorporate phasor measurements into power system state estimation. In Proceedings of the IREP Symposium Bulk Power System Dynamics and Control-IX Optimization, Security and Control of the Emerging Power Grid, Rethymno, Greece, 25–30 August 2013; pp. 1–11. [Google Scholar]
- Simões, A.; Albuquerque, A.; Bez, D. An estimation fusion method for including phasor measurements into power system real-time modeling. IEEE Trans. Power Syst. 2013, 28, 1910–1920. [Google Scholar] [CrossRef]
- Ju, Y.T.; Wu, W.C.; Cheng, X.Q.; Zhang, B.M.; Sun, H.B. Multi-source information based current matching state estimation for distribution network. Autom. Electr. Power Syst. 2012, 36, 53–57. [Google Scholar] [CrossRef]
- Barry, H.; Milan, P.; Singh, R. A Comparison of MV Distribution System State Estimation Methods using Field Data. In Proceedings of the IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; pp. 1–5. [Google Scholar]
- Wu, J.; He, Y.; Jenkins, N. A robust state estimator for medium voltage distribution networks. IEEE Trans. Power Syst. 2013, 28, 1008–1016. [Google Scholar] [CrossRef]
- Hayes, B.P.; Gruber, J.K.; Prodanovic, M. A Closed-Loop State Estimation Tool for MV Network Monitoring and Operation. IEEE Trans. Smart Grid 2015, 6, 2116–2125. [Google Scholar] [CrossRef]
- Yan, W.; Duan, L.; Yang, H.Y.; Zhao, X.; Yu, J. Robust State Estimation for Three-phase Four-wire Distribution System Using Smart Meters Measurement Data. Proc. CSEE 2015, 35, 60–67. [Google Scholar] [CrossRef]
- Wang, F.; Zhen, Z.; Wang, B.; Mi, Z.Q. Comparative Study on KNN and SVM Based Weather Classification Models for Day Ahead Short Term Solar PV Power Forecasting. Appl. Sci. 2017, 8, 28. [Google Scholar] [CrossRef]
- Wang, F.; Zhen, Z.; Wang, B.; Peng, J.F. Climate Change and Power Security: Power Load Prediction for Rural Electrical Microgrids Using Long Short Term Memory and Artificial Neural Networks. Appl. Sci. 2018, 8, 749. [Google Scholar] [CrossRef]
- Xin, A.; Wang, C.; Zhu, W.G.; Xiao, Y. Derivation and Comparison of Two Versions of Linear Power Flow Method for Distribution Networks. Power Syst. Technol. 2017, 41, 4004–4013. [Google Scholar]
- Rafael, S.S.; Thiago, R.F.; Madson, C.A. Specifying angular reference for three-phase distribution system state estimators. IET Gener. Transm. Distrib. 2018, 12, 1655–1663. [Google Scholar] [CrossRef]
- Arash, A.; Francis, T.; Djordje, A.; Juri, J.; Ebrahim, V. Distribution system state estimation based on non-synchronized smart meters. IEEE Trans. Smart Grid 2015, 6, 2919–2928. [Google Scholar] [CrossRef]
- Wang, B.; Jian, C.L.; Gao, J.; Liu, C. Newton-Gauss Algorithm of Robust Weighted Total Least Squares Model. Acta Geodaetica et Cartographica Sinica 2015, 44, 602–608. [Google Scholar] [CrossRef]
- Xue, A.; Zhang, Z.; Bi, T. Online identification of transmission line positive-sequence parameters based on adaptive robust least squares. Trans. Chin. Electrotech. Soc. 2015, 30, 202–209. [Google Scholar] [CrossRef]
- Vladan, D.K.; Andrija, T.S. Bad area detection and whitening transformation-based identification in three-phase distribution state estimation. IET Gener. Transm. Distrib. 2017, 11, 2351–2361. [Google Scholar] [CrossRef]
- Hong, W.; Wen, Z.; Yu, T.L. A Robust Measurement Placement Method for Active Distribution System State Estimation Considering Network Reconfiguration. IEEE Trans. Smart Grid 2018, 9, 2108–2117. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimation Method | Convergence | Iterations | Execution Time(s) | MAE of Bus Voltage Amplitude |
|---|---|---|---|---|
| WLS | Yes | 22 | 0.144 | 3.17033 × 10−5 |
| EXP | Yes | 37 | 0.496 | 6.57133 × 10−5 |
| IIGGIII | Yes | 32 | 0.357 | 1.72627 × 10−5 |
| IGGIII | Yes | 26 | 0.182 | 9.44840 × 10−5 |
| Time/s | MAE of Bus Voltage Amplitude | The Relative Error of the Estimated Voltage Phase | ||||||
|---|---|---|---|---|---|---|---|---|
| Bus 6 | Bus 30 | Bus 6 | Bus 30 | |||||
| WLS-UKF | IIGGIII-LSE | WLS-UKF | IIGGIII-LSE | WLS-UKF | IIGGIII-LSE | WLS-UKF | IIGGIII-LSE | |
| 20 | 0.00106 | 0.00134 | 0.00018 | 0.00042 | 0.00106 | 0.00070 | 0.00044 | 0.00002 |
| 20.5 | 0.00142 | 0.00124 | 0.00010 | 0.00056 | 0.00119 | 0.00091 | 0.00055 | 0.00019 |
| 21 | 0.00133 | 0.00083 | 0.00014 | 0.00005 | 0.00115 | 0.00101 | 0.00041 | 0.00036 |
| 21.5 | 0.00127 | 0.00124 | 0.00041 | 0.00014 | 0.00132 | 0.00112 | 0.00059 | 0.00044 |
| 22 | 0.03083 | 0.05652 | 0.01267 | 0.00540 | 0.02751 | 0.02548 | 0.00983 | 0.02306 |
| 22.5 | 0.03860 | 0.06421 | 0.02105 | 0.00260 | 0.03507 | 0.03290 | 0.01728 | 0.03056 |
| 23 | 0.00608 | 0.03733 | 0.00018 | 0.01051 | 0.02039 | 0.01638 | 0.00032 | 0.00021 |
| 23.5 | 0.00375 | 0.03875 | 0.00160 | 0.00875 | 0.02158 | 0.01745 | 0.00135 | 0.00115 |
| 24 | 0.00116 | 0.00124 | 0.00018 | 0.00042 | 0.00106 | 0.00070 | 0.00044 | 0.00002 |
| 24.5 | 0.00132 | 0.00114 | 0.00010 | 0.00056 | 0.00119 | 0.00091 | 0.00055 | 0.00019 |
| Measurement Error of Voltage Amplitude at Bus 6 | Estimation Method | Convergence | Iterations | Execution Time | MAE |
|---|---|---|---|---|---|
| Normal condition | WLS | Yes | 12 | 0.236 | 0.00500 |
| EXP | Yes | 6 | 0.165 | 0.00004 | |
| IIGGIII | Yes | 9 | 0.174 | 0.00004 | |
| IGGIII | Yes | 13 | 0.165 | 0.00510 | |
| 5% | WLS | Yes | 12 | 0.197 | 0.00452 |
| EXP | Yes | 7 | 0.167 | 0.00008 | |
| IIGGIII | Yes | 8 | 0.162 | 0.00002 | |
| IGGIII | Yes | 13 | 0.175 | 0.00449 | |
| 10% | WLS | Yes | 12 | 0.190 | 0.01125 |
| EXP | Yes | 7 | 0.199 | 0.00062 | |
| IIGGIII | Yes | 8 | 0.193 | 0.00004 | |
| IGGIII | Yes | 13 | 0.173 | 0.01123 | |
| 50% | WLS | Yes | 12 | 0.190 | 0.06593 |
| EXP | Yes | 11 | 0.336 | 0.00300 | |
| IIGGIII | Yes | 8 | 0.174 | 0.00044 | |
| IGGIII | Yes | 12 | 0.172 | 0.06580 | |
| 95% | WLS | Yes | 12 | 0.194 | 0.12745 |
| EXP | Yes | 12 | 0.201 | 0.00353 | |
| IIGGIII | Yes | 8 | 0.189 | 0.00127 | |
| IGGIII | Yes | 11 | 0.163 | 0.12723 |
| Time (s) | MAE of Bus Voltage Amplitude | The Relative Error of the Estimated Voltage Phase | ||||||
|---|---|---|---|---|---|---|---|---|
| Bus 6 | Bus 30 | Bus 6 | Bus 30 | |||||
| EXP-LSE | IIGGIII-LSE | EXP-LSE | IIGGIII-LSE | EXP-LSE | IIGGIII-LSE | EXP-LSE | IIGGIII-LSE | |
| 20 | 0.00120 | 0.00032 | 0.00145 | 0.00066 | 0.85947 | 0.01101 | 0.63956 | 0.01316 |
| 20.5 | 0.00317 | 0.00284 | 0.00154 | 0.00043 | 0.11463 | 0.06713 | 0.00220 | 0.00360 |
| 21 | 0.00258 | 0.00114 | 0.00002 | 0.00100 | 0.11992 | 0.06101 | 0.00374 | 0.00439 |
| 21.5 | 0.00277 | 0.00101 | 0.00209 | 0.00006 | 0.15777 | 0.02270 | 0.01606 | 0.01617 |
| 22 | 0.00218 | 0.00177 | 0.00055 | 0.00022 | 0.16044 | 0.02037 | 0.00175 | 0.00192 |
| 22.5 | 0.00102 | 0.00001 | 0.00145 | 0.00017 | 0.19162 | 0.01084 | 0.00845 | 0.00842 |
| 23 | 0.00339 | 0.00258 | 0.00005 | 0.00001 | 0.15365 | 0.02771 | 0.01930 | 0.01903 |
| 23.5 | 0.00204 | 0.00008 | 0.00027 | 0.00080 | 0.19360 | 0.01344 | 0.01510 | 0.01506 |
| 24 | 0.00145 | 0.00007 | 0.00019 | 0.00100 | 0.21925 | 0.03875 | 0.01770 | 0.01747 |
| 24.5 | 0.00134 | 0.00129 | 0.00173 | 0.00100 | 0.17896 | 0.00172 | 0.00449 | 0.00444 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, X.; Chen, Y.; Xu, T.; Wang, C.; Yong, C.; Li, P.; Yu, L. A Hybrid State Estimator Based on SCADA and PMU Measurements for Medium Voltage Distribution System. Appl. Sci. 2018, 8, 1527. https://doi.org/10.3390/app8091527
Kong X, Chen Y, Xu T, Wang C, Yong C, Li P, Yu L. A Hybrid State Estimator Based on SCADA and PMU Measurements for Medium Voltage Distribution System. Applied Sciences. 2018; 8(9):1527. https://doi.org/10.3390/app8091527
Chicago/Turabian StyleKong, Xiangyu, Ying Chen, Tao Xu, Chengshan Wang, Chengsi Yong, Peng Li, and Li Yu. 2018. "A Hybrid State Estimator Based on SCADA and PMU Measurements for Medium Voltage Distribution System" Applied Sciences 8, no. 9: 1527. https://doi.org/10.3390/app8091527
APA StyleKong, X., Chen, Y., Xu, T., Wang, C., Yong, C., Li, P., & Yu, L. (2018). A Hybrid State Estimator Based on SCADA and PMU Measurements for Medium Voltage Distribution System. Applied Sciences, 8(9), 1527. https://doi.org/10.3390/app8091527