Virtual Inertia and Mechanical Power-Based Control Strategy to Provide Stable Grid Operation under High Renewables Penetration


 , , and
, , and
Abstract
:1. Introduction
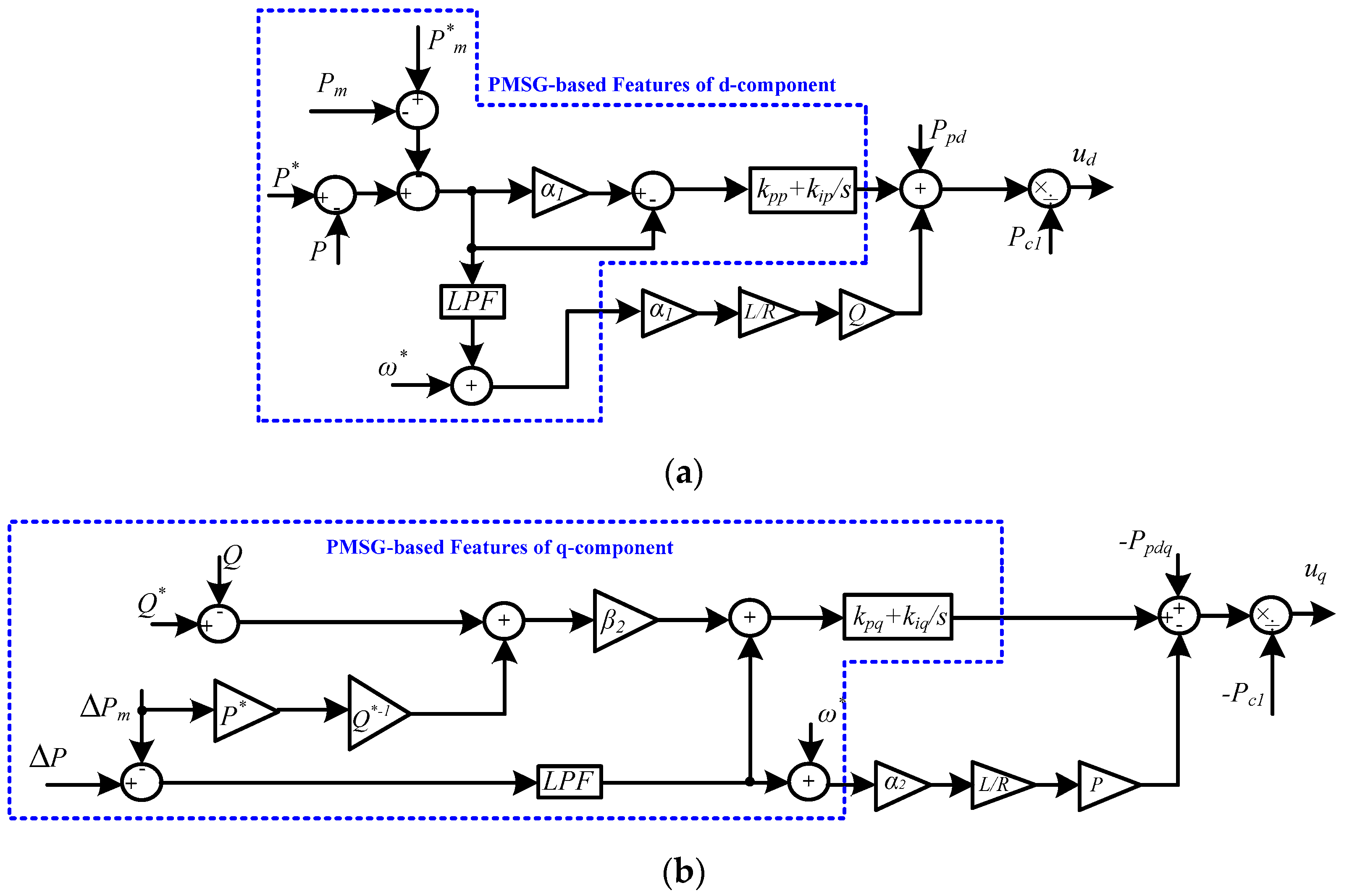
2. Introduction of the Proposed Control Technique
The Dynamic Model Analysis
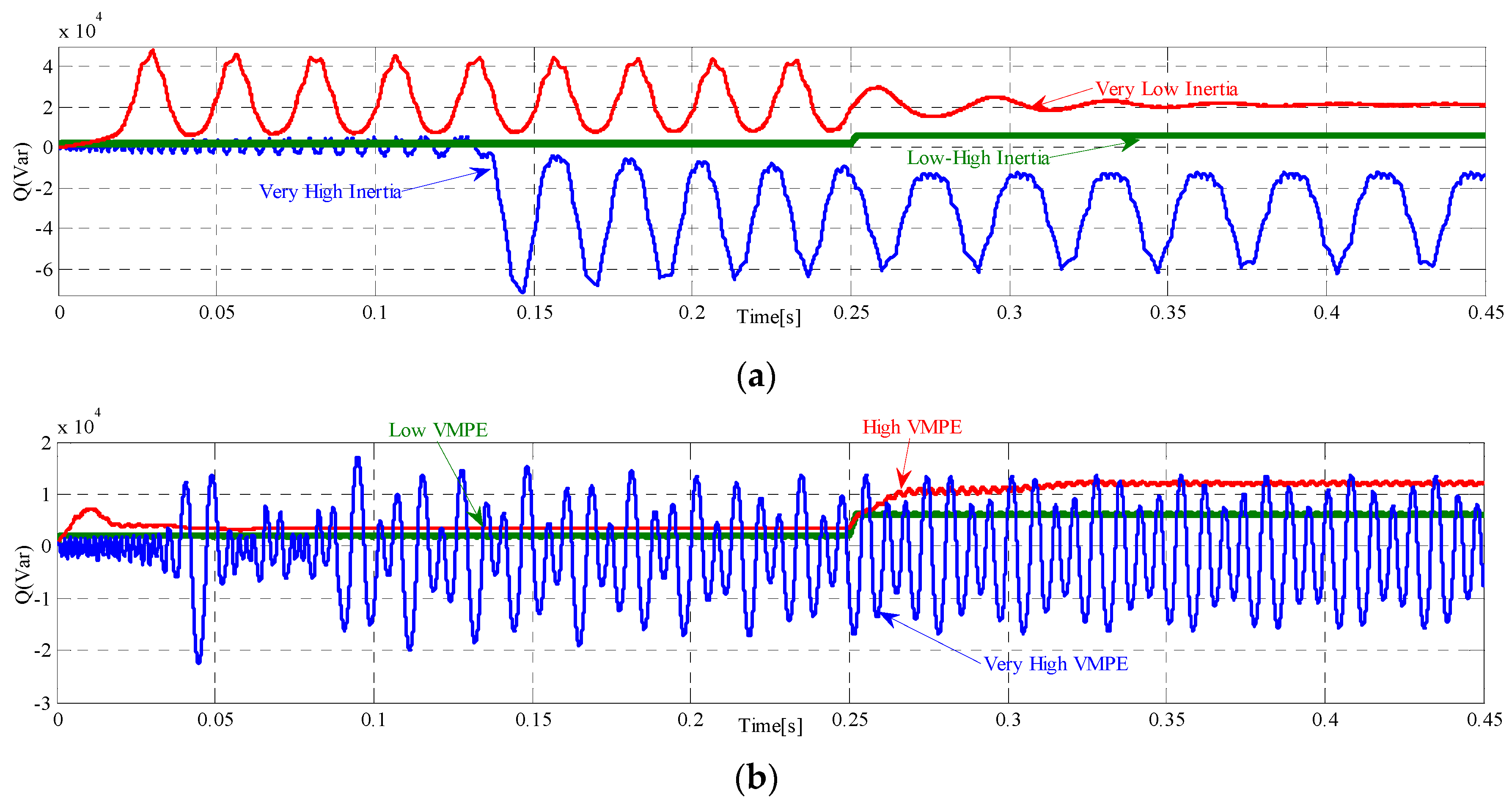
3. Evaluation the Impacts of Virtual Inertia and VMPE on the Proposed Dynamic Model
4. Evaluation of the Impacts of Active Power Error on Reactive Power in the Proposed Controller
5. Results and Discussions
5.1. Active and Reactive Power Sharing Assessment
5.2. Evaluation of the Grid Frequency and the Voltage Magnitude
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Parameters | |
| R | Resistance of Grid Interfaced Converter |
| L | Inductance of Grid Interfaced Converter |
| C | DC-Link Capacitor |
| J | Virtual Inertia |
| kpp&kpq | Proportional Coefficients of Control Components |
| kip&kiq | Integral Coefficients of Control Components |
| ω12 | Angular Frequencies of Low Pass Filter |
| α12 | The Control Factor of Active Power |
| β12 | The Control Factor of Reactive Power |
| Abbreviations | |
| RESs | Renewable Energy Sources |
| DSC | Double Synchronous Controller |
| PMSG | Permanent Magnet Synchronous Generator |
| VMPE | Virtual Mechanical Power Error |
| VI | Virtual Inertia |
| LPF | Low Pass Filter |
| PCC | Point of Common Coupling |
| Variables | |
| idq | Interfaced Converter Currents |
| vdq | The Voltages of PCC |
| vdc | DC Link Voltage of Interfaced Converter |
| udq | Switching Functions of Interfaced Converter |
| idc | DC Link Current of Interfaced Converter |
| P | Active Power of Interfaced Converter |
| Q | Reactive Power of Interfaced Converter |
| Pc1 | Power of DC link current and d Component Voltage |
| Pc2 | Power of DC link current and q Component Voltage |
| Ppd | Power due to d Component Voltage |
| Ppdq | Power due to d and q Component Voltage |
| Pm | Virtual Mechanical Power |
| ω | Angular Frequency |
| ΔP | Active Power Error |
| ΔQ | Reactive Power Error |
| ΔPm | Virtual Mechanical Power Error |
| Δω | Angular Frequency Error |
| P* | The Reference Value of Active Power |
| Q* | The Reference Value of Reactive Power |
| Pm* | The Reference Value of VMP |
| ω* | The Reference Value of Angular Frequency |
Appendix A
References
- Ashabani, M.; Gooi, H.B.; Guerrero, J.M. Designing high-order power-source synchronous current converters for islanded and grid-connected microgrids. Appl. Energy 2017, in press. [Google Scholar] [CrossRef]
- Vasquez-Arnez, R.L.; Ramos, D.S.; Carpio-Huayllas, T.E. Microgrid dynamic response during the pre-planned and forced islanding processes involving DFIG and synchronous generators. Int. J. Elect. Power Energy Syst. 2014, 62, 175–182. [Google Scholar] [CrossRef]
- Mehrasa, M.; Pouresmaeil, E.; Mehrjerdi, H.; Jørgensen, B.N.; Catalão, J.P.S. Control technique for enhancing the stable operation of distributed generation units within a microgrid. Energy Convers. Manag. 2015, 97, 362–373. [Google Scholar] [CrossRef]
- Mehrasa, M.; Adabi, M.E.; Pouresmaeil, E.; Adabi, J. Passivity based control technique for integration of DG resources into the power grid. Int. J. Elect. Power Energy Syst. 2014, 58, 281–290. [Google Scholar] [CrossRef]
- Xiang-zhen, Y.; Jian-hui, S.; Ming, D.; Jin-wei, L.; Yan, D. Control strategy for virtual synchronous generator in microgrid. In Proceedings of the 4th International Conference on Electric Utility Deregulation and Restructing and Power Technologies DRPT, Weihai, China, 6–9 July 2011; pp. 1633–1637. [Google Scholar]
- Mehrasa, M.; Sepehr, A.; Pouresmaeil, E.; Kyyrä, J.; Marzband, M.; Catalão, J.P.S. Angular frequency dynamic-based control technique of a grid-interfaced converter emulated by a synchronous generator. In Proceedings of the International Conference on Smart Energy Systems and Technologies IEEE Conference (SEST 2018), Sevilla, Spain, 10–12 September 2018; pp. 1–5. [Google Scholar]
- Hasanzadeh, A.; Edrington, C.S.; Stroupe, N.; Bevis, T. Real-time emulation of a high-speed microturbine permanent-magnet synchronous generator using multiplatform hardware-in-the-loop realization. IEEE Trans. Ind. Electron. 2014, 61, 3109–3118. [Google Scholar] [CrossRef]
- Griffo, A.; Drury, D. Hardware in the loop emulation of synchronous generators for aircraft power systems. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion ESARS, Bologna, Italy, 16–18 October 2012; pp. 1–6. [Google Scholar]
- Pulendran, S.; Tate, J.E. Hysteresis control of voltage source converters for synchronous machine emulation. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference PEMC, Novi Sad, Serbia, 4–6 September 2012; pp. LS3b.2-1–LS3b.2-8. [Google Scholar]
- Mehrasa, M.; Pouresmaeil, E.; Pournazarian, B.; Sepehr, A.; Marzband, M.; Catalão, J.P.S. Synchronous resonant control technique to address power grid instability problems due to high renewables penetration. Energies 2018, 11, 2469. [Google Scholar] [CrossRef]
- Mehrasa, M.; Sepehr, A.; Pouresmaeil, E.; Marzband, M.; Catalão, J.P.S.; Kyyrä, J. Stability analysis of a synchronous generator-based control technique used in large-scale grid integration of renewable energy. In Proceedings of the 2018 International Conference on Smart Energy Systems and Technologies, IEEE Conference (SEST), Sevilla, Spain, 10–12 September 2018; pp. 1–5. [Google Scholar]
- Li, M.; Wang, Y.; Xu, N.; Liu, Y.; Wang, W.; Wang, H.; Lei, W. A novel virtual synchronous generator control strategy based on improved swing equation emulating and power decoupling method. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar]
- Guan, M.; Pan, W.; Zhang, J.; Hao, Q.; Cheng, J.; Zheng, X. Synchronous generator emulation control strategy for voltage source converter (vsc) stations. IEEE Trans. Power Syst. 2015, 30, 3093–3101. [Google Scholar] [CrossRef]
- Tielens, P.; Van Hertem, D. Influence of system wide implementation of virtual inertia on small-signal stability. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Leuven, Belgium, 4–8 April 2016; pp. 1–6. [Google Scholar]
- Aouini, R.; Marinescu, B.; Kilani, K.B.; Elleuch, M. Synchronverter-based emulation and control of hvdc transmission. IEEE Trans. Power Syst. 2016, 31, 278–286. [Google Scholar] [CrossRef]
- Remon, D.; Cantarellas, A.M.; Rakhshani, E.; Candela, I.; Rodriguez, P. An active power self-synchronizing controller for grid-connected converters emulating inertia. In Proceedings of the 2014 International Conference on Renewable Energy Research and Application ICRERA, Milwaukee, WI, USA, 19–22 October 2014; pp. 424–429. [Google Scholar]
- Torres, M.; Lopes, L.A.C. Virtual synchronous generator control in autonomous wind-diesel power systems. In Proceedings of the 2009 IEEE Electrical Power and Energy Conference EPEC, Montreal, QC, Canada, 22–23 October 2009; pp. 1–6. [Google Scholar]
- Arco, S.D.; Suul, J.A. Virtual synchronous machines—classification of implementations and analysis of equivalence to droop controllers for microgrids. In Proceedings of the 2013 IEEE Grenoble Conference, PowerTech, Grenoble, France, 16–20 June 2013; pp. 1–7. [Google Scholar]
- D’Arco, S.; Suul, J.A.; Fosso, O.B. A virtual synchronous machine implementation for distributed control of power converters in smart grids. Elec. Power Syst. Res. 2015, 122, 180–197. [Google Scholar] [CrossRef]
- Andalib-Bin-Karim, C.; Liang, X.; Zhang, H. Fuzzy Secondary controller based virtual synchronous generator control scheme for interfacing inverters of renewable distributed generation in microgrids. IEEE Trans. Ind. Appl. 2017, 54, 1047–1061. [Google Scholar] [CrossRef]
- Karapanos, V.; Kotsampopoulos, P.; Hatziargyriou, N. Performance of the linear and binary algorithm of virtual synchronous generators for the emulation of rotational inertia. Elec. Power. Sys. Res. 2015, 123, 119–127. [Google Scholar] [CrossRef]
- Prieto-Araujo, E.; O-Rosell, P.; Cheah-Mañe, M.; Villafafila-Robles, R.; Gomis-Bellmunt, O. Renewable energy emulation concepts for microgrids. Renew. Sustain. Energy Rev. 2015, 50, 325–345. [Google Scholar] [CrossRef] [Green Version]
- Bevrani, H.; Ise, T.; Miura, Y. Virtual synchronous generators: A survey and new perspectives. Int. J. Elect. Power. Energy Syst. 2014, 54, 244–254. [Google Scholar] [CrossRef]
- Alsiraji, H.A.; El-Shatshat, R. Comprehensive assessment of virtual synchronous machine based voltage source converter controllers. IET Gener. Transm. Distrib. 2017, 11, 1762–1769. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| dc-link Voltage (vdc) | 850 V | J1 | 1 × 103 s |
| Phase ac voltage | 220 V | Pm | 3.3 kW |
| Fundamental frequency | 50 Hz | P | 3 kW |
| Switching frequency | 10 kHz | Q | 2 kvar |
| Interface converter resistance | 0.1 Ohm | Interface converter inductance | 45 mH |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehrasa, M.; Pouresmaeil, E.; Soltani, H.; Blaabjerg, F.; Calado, M.R.A.; Catalão, J.P.S. Virtual Inertia and Mechanical Power-Based Control Strategy to Provide Stable Grid Operation under High Renewables Penetration. Appl. Sci. 2019, 9, 1043. https://doi.org/10.3390/app9061043
Mehrasa M, Pouresmaeil E, Soltani H, Blaabjerg F, Calado MRA, Catalão JPS. Virtual Inertia and Mechanical Power-Based Control Strategy to Provide Stable Grid Operation under High Renewables Penetration. Applied Sciences. 2019; 9(6):1043. https://doi.org/10.3390/app9061043
Chicago/Turabian StyleMehrasa, Majid, Edris Pouresmaeil, Hamid Soltani, Frede Blaabjerg, Maria R. A. Calado, and João P. S. Catalão. 2019. "Virtual Inertia and Mechanical Power-Based Control Strategy to Provide Stable Grid Operation under High Renewables Penetration" Applied Sciences 9, no. 6: 1043. https://doi.org/10.3390/app9061043