Fault Feature Extraction and Enhancement of Rolling Element Bearings Based on Maximum Correlated Kurtosis Deconvolution and Improved Empirical Wavelet Transform

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Basic Theory
2.1. MCKD Algorithm
- Step 1.
- Set the period of deconvolution T, the number of shift M, and the maximum iteration number n;
- Step 2.
- Compute , , and by using the acquired signal x;
- Step 3.
- Initiate the filter coefficients f with L samples; Generally, the initial filter coefficients equals to prevent the MCKD algorithm from converging to the local solution. The difference is in the center.
- Step 4.
- Calculate the output signal by Equation (1);
- Step 5.
- Compute and based on signal y;
- Step 6.
- Update the filter coefficient f by Equation (5);
- Step 7.
- Determine whether the difference between iterations () is less than the given threshold. If this criterion is satisfied or the iteration equals n, then terminate the iteration progress; otherwise, the process is reverted back to Step 4;
- Step 8.
- Once the optimal filter coefficients f is obtained, the final output signal can be calculated using Equation (1).
2.2. Empirical Wavelet Transform
3. Fault Feature Extraction and Enhancement of Rolling Element Bearing Based on MCKD-EWT
3.1. Improved Empirical Wavelet Transform
- Step 1.
- Conduct FFT and obtain the Fourier spectrum of the signal .
- Step 2.
- Calculate the following threshold according to the method of literature [35].where denotes the pre-set threshold, and are, respectively, the maximum and minimum magnitudes of the spectrum and r is inversely proportional to the SNR. Herein, a constant C is used to control the level of threshold. The larger the value of C, the higher the level of threshold tends to be. In this paper, r is taken to be 0.1 based on the assumption that the SNR of signals is higher than 85 dB and C = 10. The steps are continued as follows:
- Step 3.
- Calculate the envelope curve of the amplitude spectrum based on the local maxima and minima by linear interpolation method, then modify the envelope curve according to the threshold, and finally detect all the extras of the modified envelope curve. If the number of the local maxima points above the threshold is larger than the pre-defined number N of the components, then keep on calculating the envelope curve of the spectrum until the number of the local maxima points is equal or less than the pre-defined number N of the components. The number for the iteration process of the calculating envelope is always 5.
- Step 4.
- Obtain the segmentation boundaries. Detect all the local extrema points of the modified envelope curve, and then get the frequency bands of EWT modes by choosing the frequencies of local maxima points as the central frequencies of the modes. After that, locate the boundaries of each mode. Differing from the segmentation method, which uses the local minima points of the modified envelope curve as the boundaries of the EWT modes introduced in the literature, this method chooses the midpoints of the adjacent local minimum points as the segmentation boundaries. The detailed steps firstly calculate the midpoints of the adjacent local minimum points, and then sort them in ascending order, i.e., , which are used to segment the frequency spectrum. Finally, choose the between the adjacent local maximum points as the boundaries.
- Step 5.
- Segment the spectrum and choose the most meaningful component. Calculate the kurtosis value of each component and choose the component with the maximum kurtosis value to further detect the fault feature.
3.2. Program of the Proposed Method
- Step 1.
- De-noise the signal by MCKD. De-noise the single accidental impact and non-impact components by implementing the MCKD to x(t). The key issue of the MCKD for a given bearing signal with faults is choosing these four parameters: the period of deconvolution T, the length of filter L, the termination number of iterations, and the number of shift M. The parameter T can be easily calculated based on the theoretical fault characteristic frequency, whereas L and M should be subjectively set without any reference. Whether the extracted fault signal is desired or not is severely influenced by the selected parameters. Therefore, selecting the optimal parameters is extremely important in MCKD. This method often chooses the termination number of iterations as a range from 20 to 30, the length of filter as a range from 100 to 300, the period of deconvolution T depending on the actual signal, and the shift number as a range from 2 to 5. Additionally, a method for setting parameters is recommended in a previous study [44].
- Step 2.
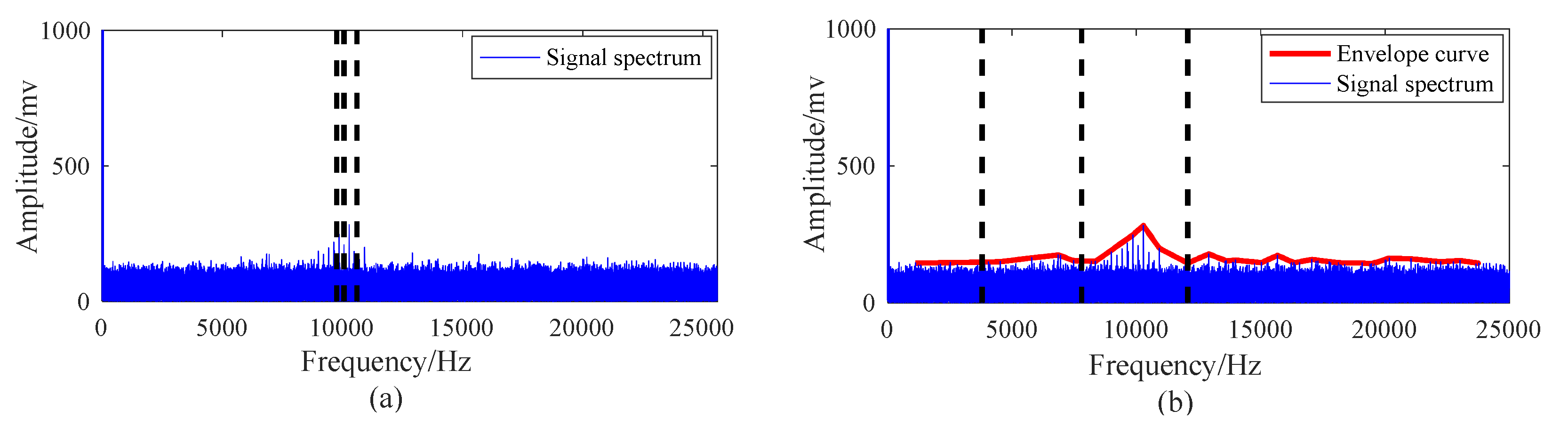
- Spectrum segmentation. Calculate the envelope curve of the amplitude spectrum of the de-noising signal. Find the maxima and minima of the envelope curve and segment the spectrum on the modified envelope curve.
- Step 3.
- Signal decomposition. Design the wavelet filter banks based on the spectrum segmentation result and decompose the signal into several sub-signals.
- Step 4.
- IMF (Intrinsic Mode Function) selection. Calculate the kurtosis of each sub-signal and choose the best sub-signal with the maximum kurtosis.
- Step 5.
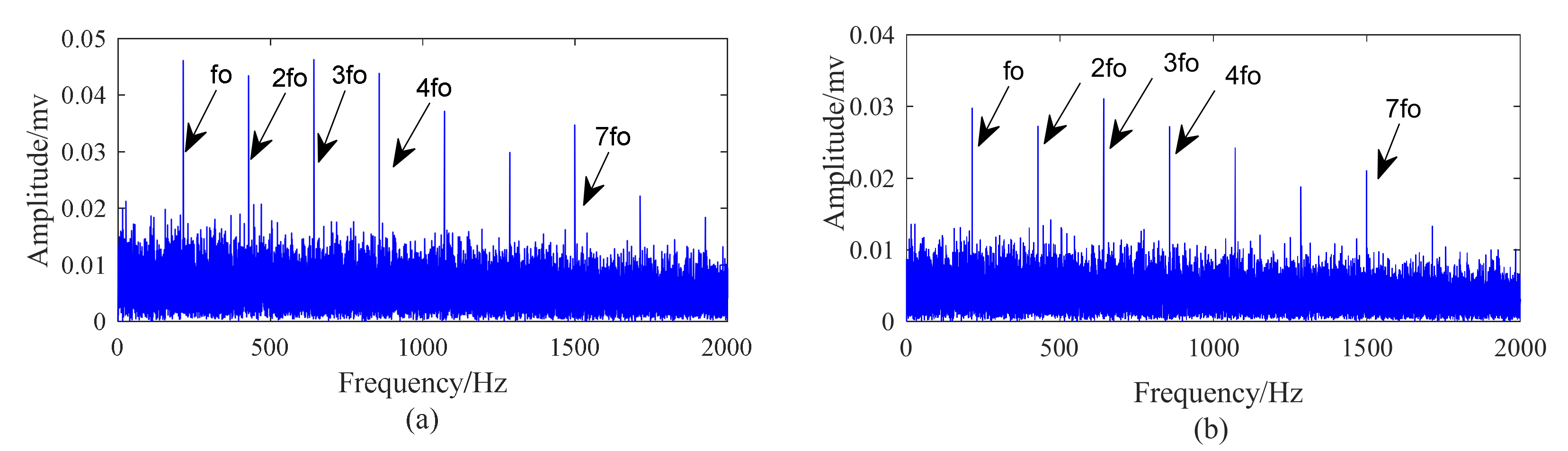
- Feature extraction. Calculate the squared envelope spectrum and teager energy operator spectrum of the chosen mode. Analyze the fault characteristic frequency of the spectrum to determine the fault type and location of the fault.
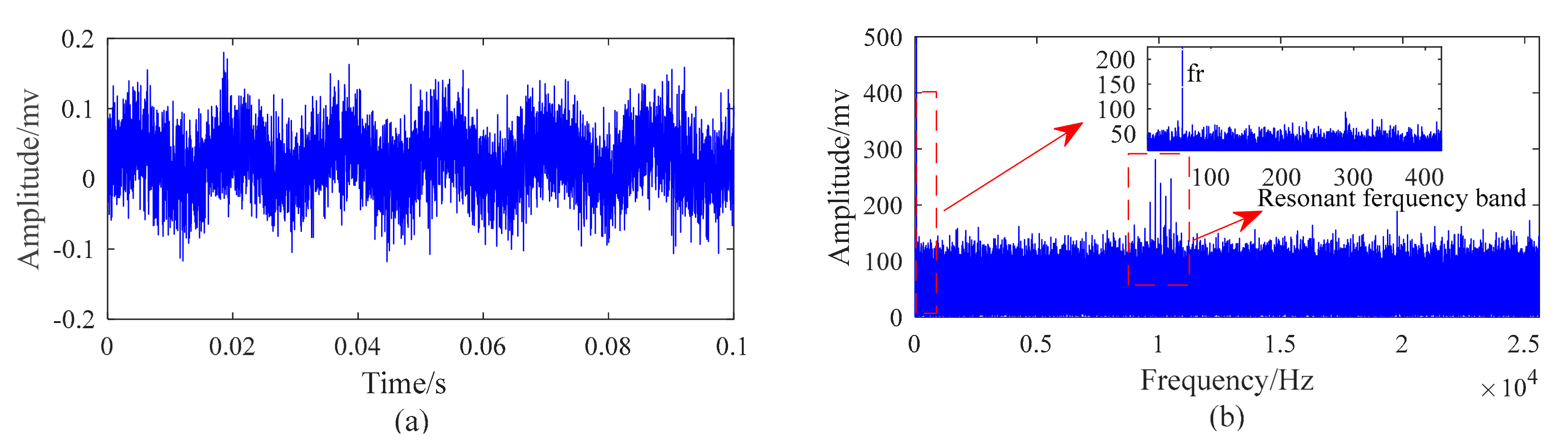
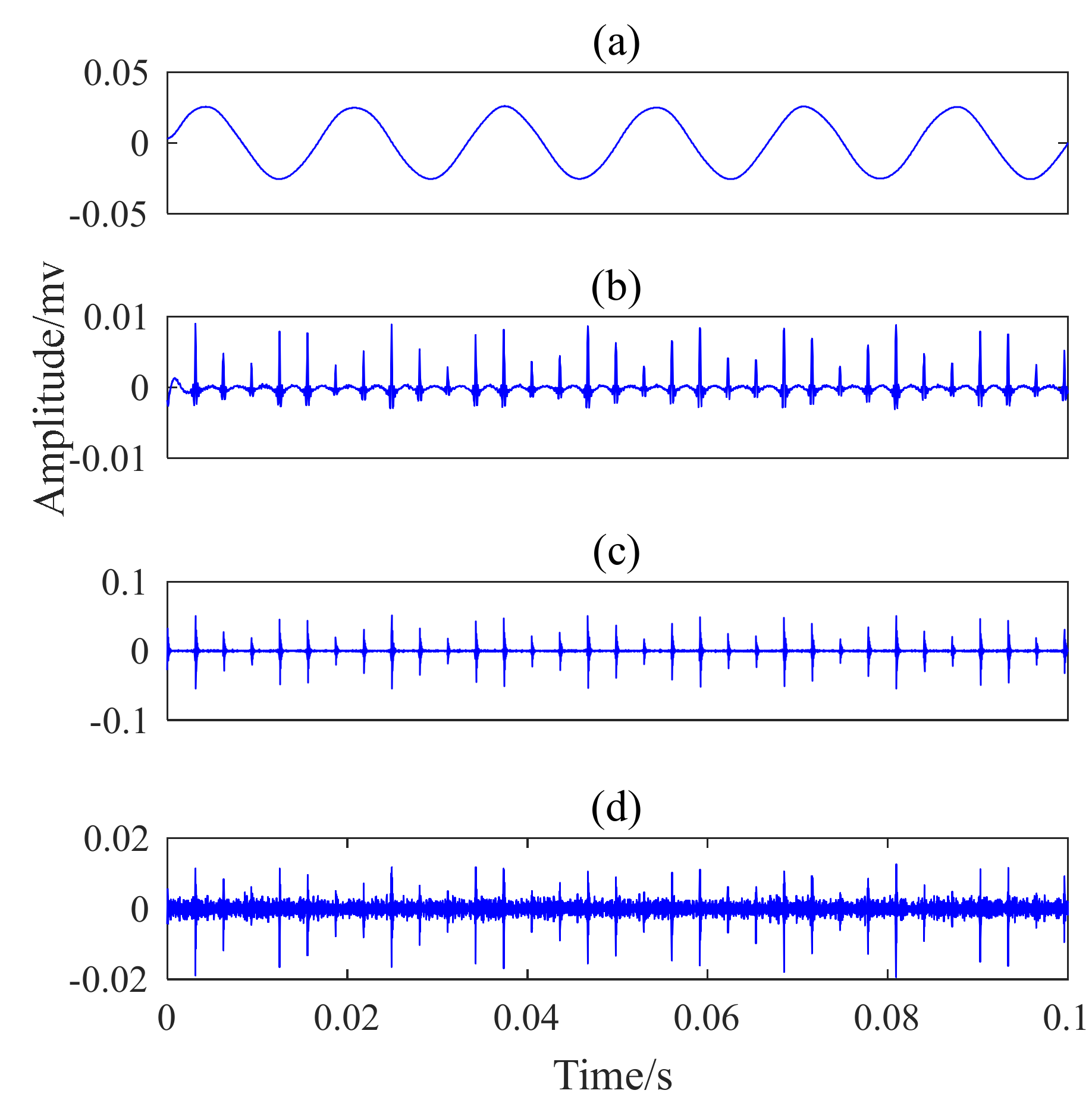
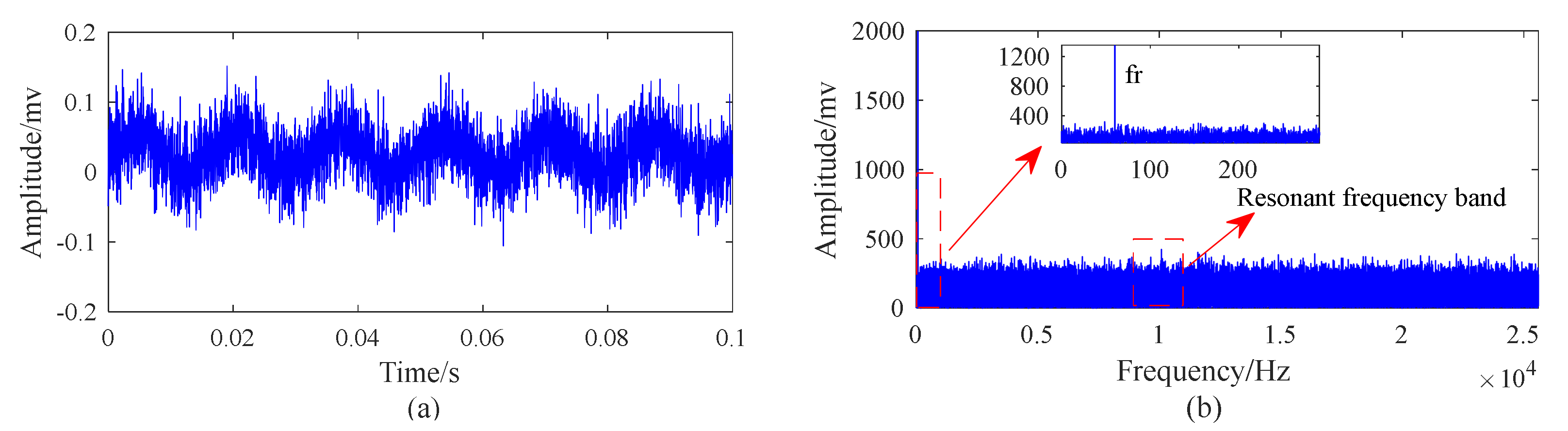
4. Simulation
4.1. Model of the Collected Vibration
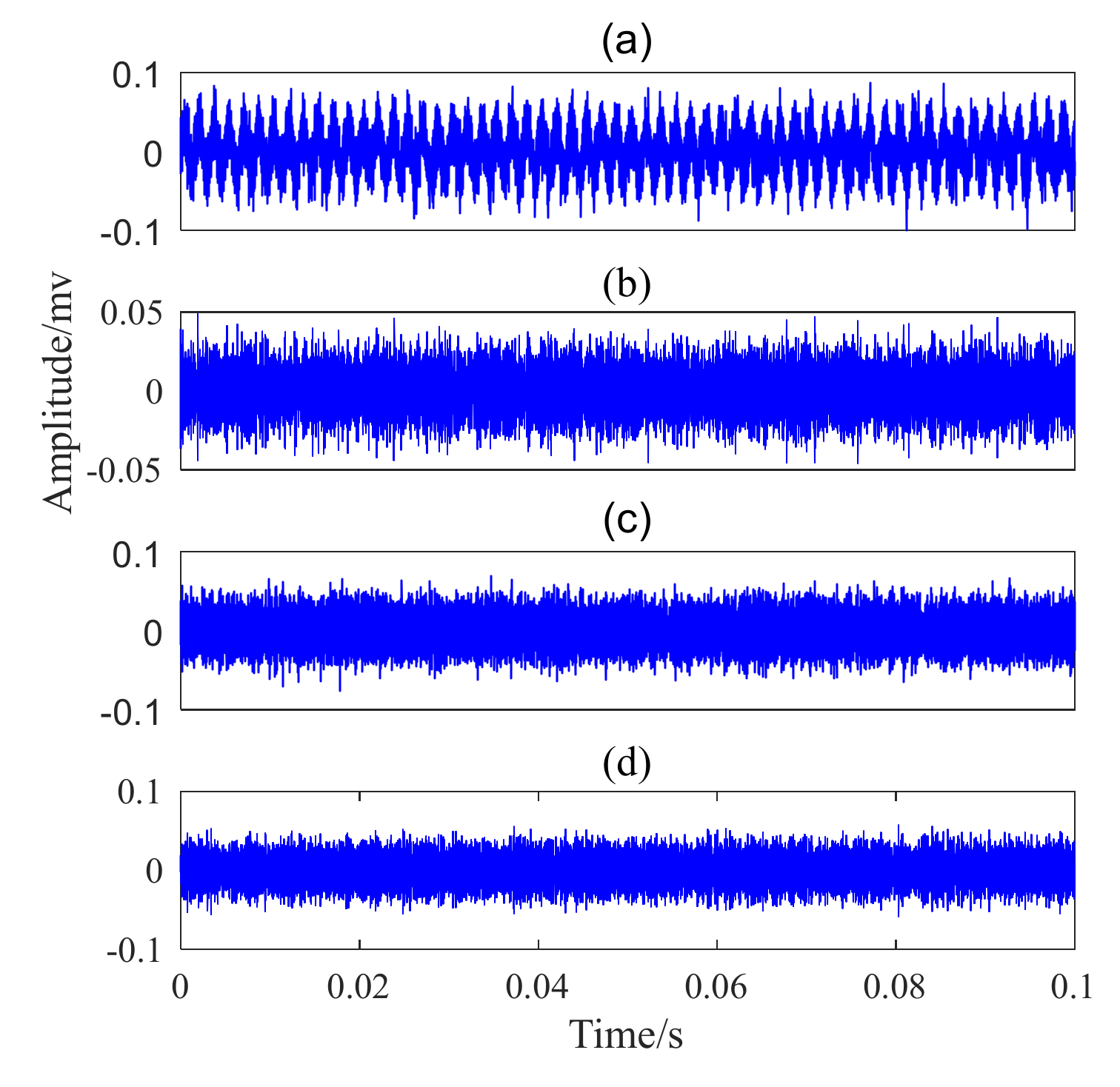
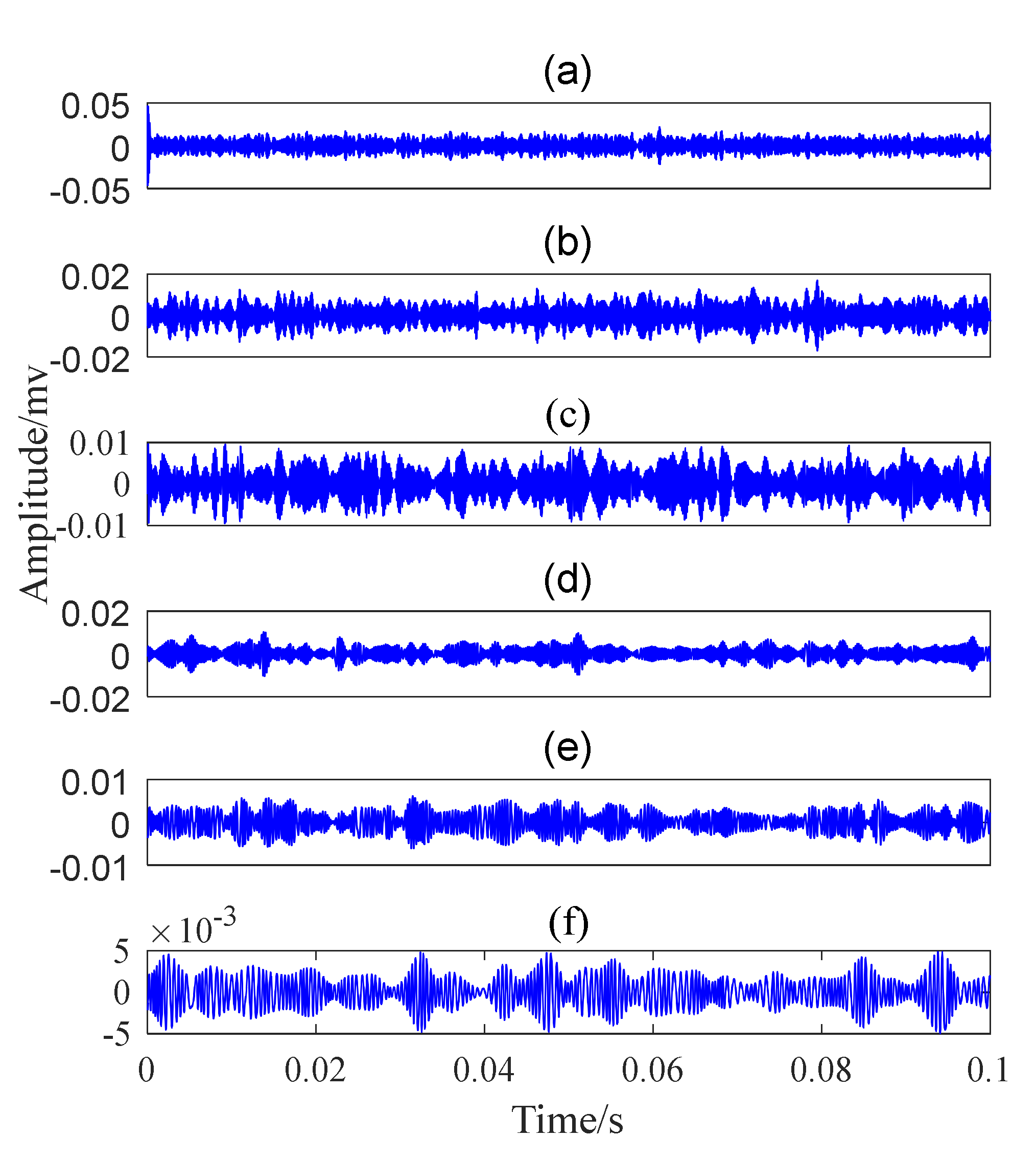
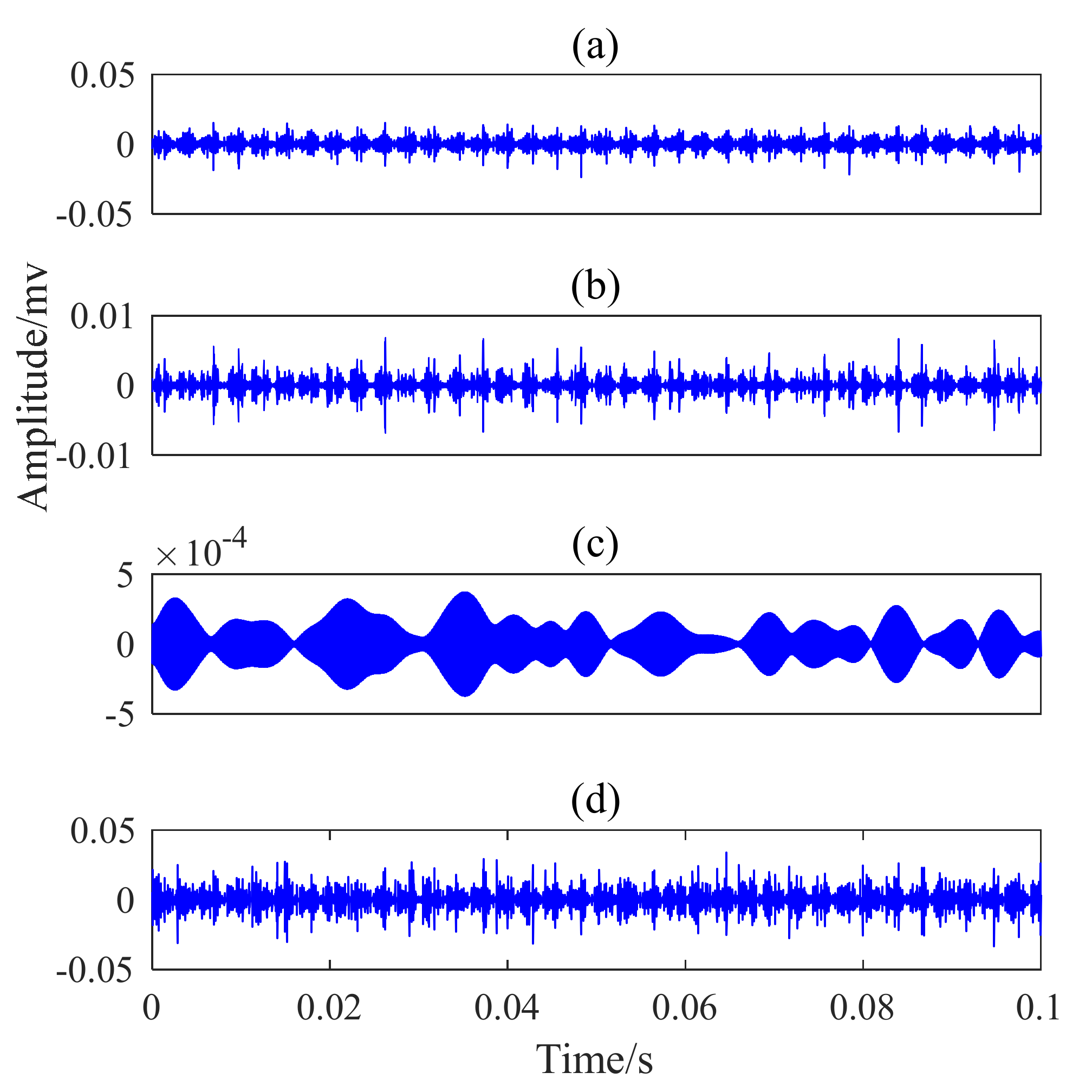
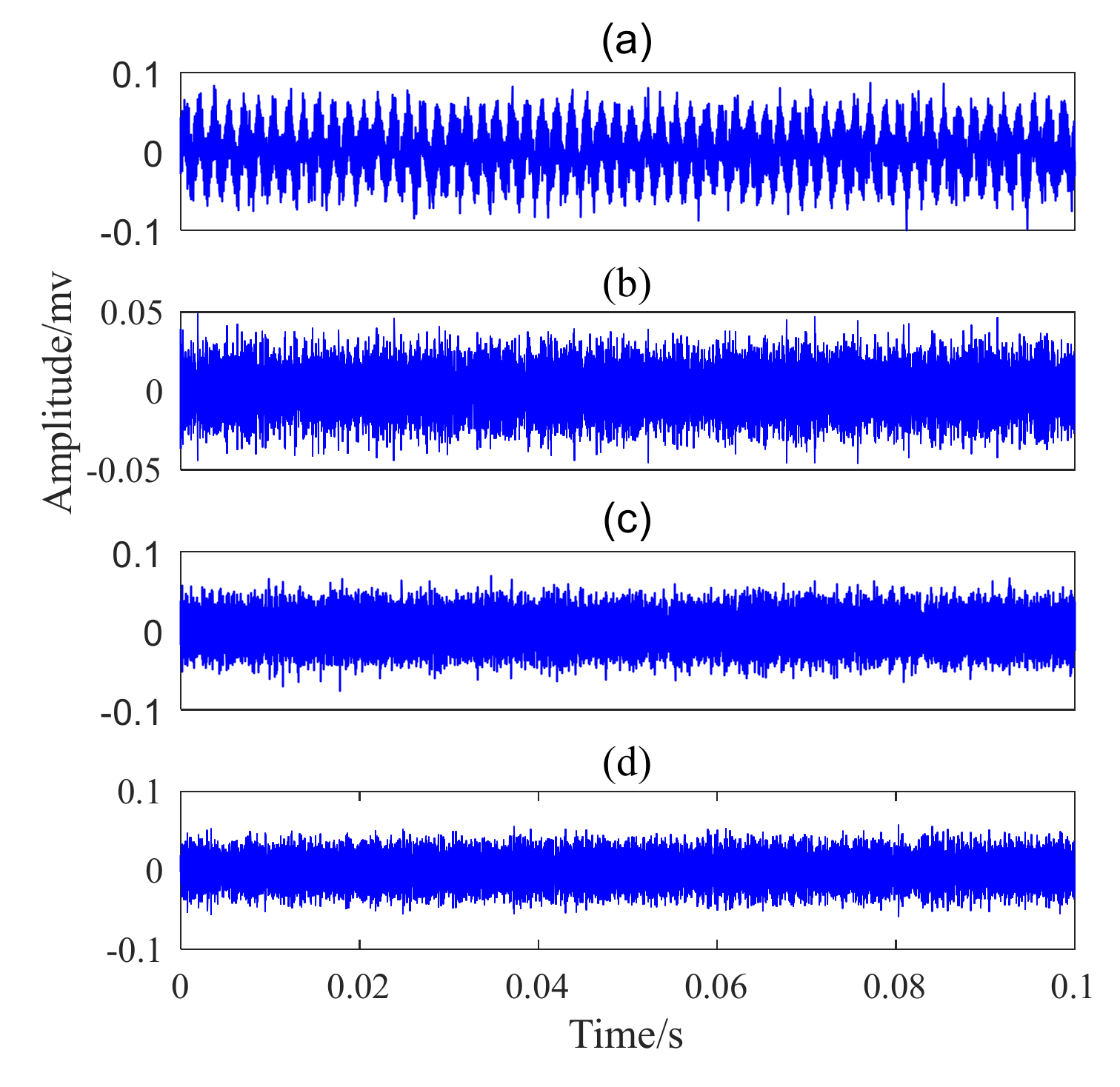
4.2. Comparison of Improved EWT, EWT, and EMD
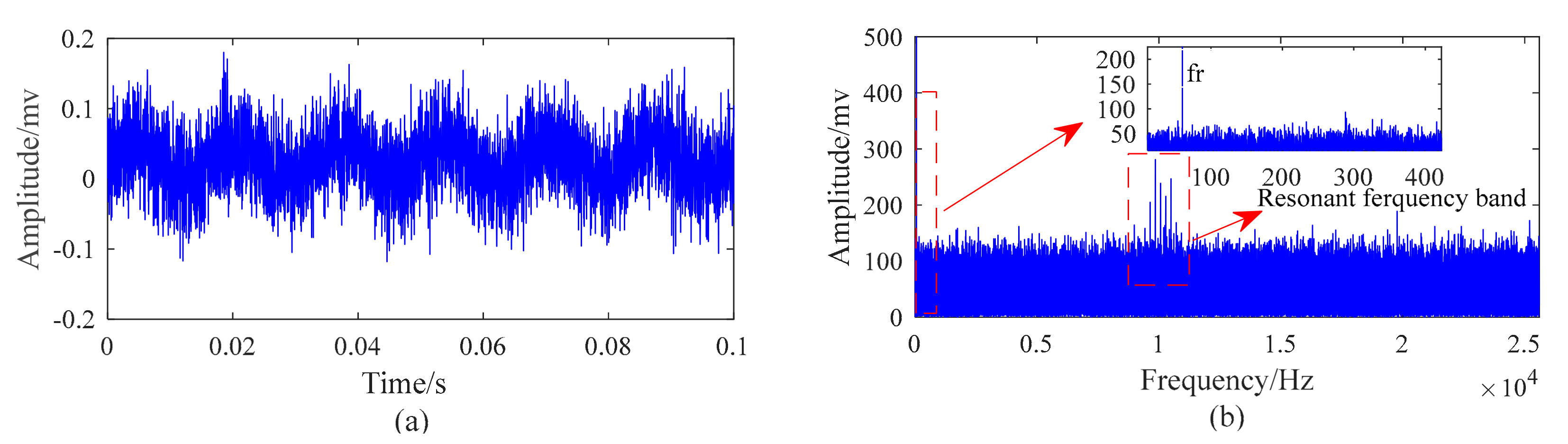
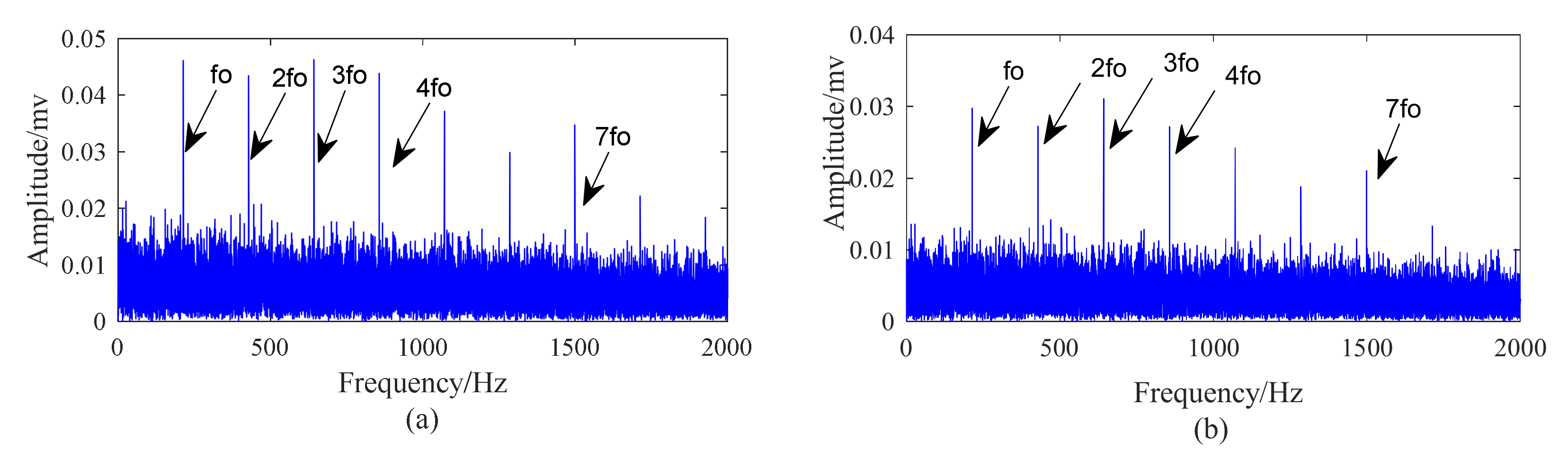
4.3. Outer Race Fault Simulation
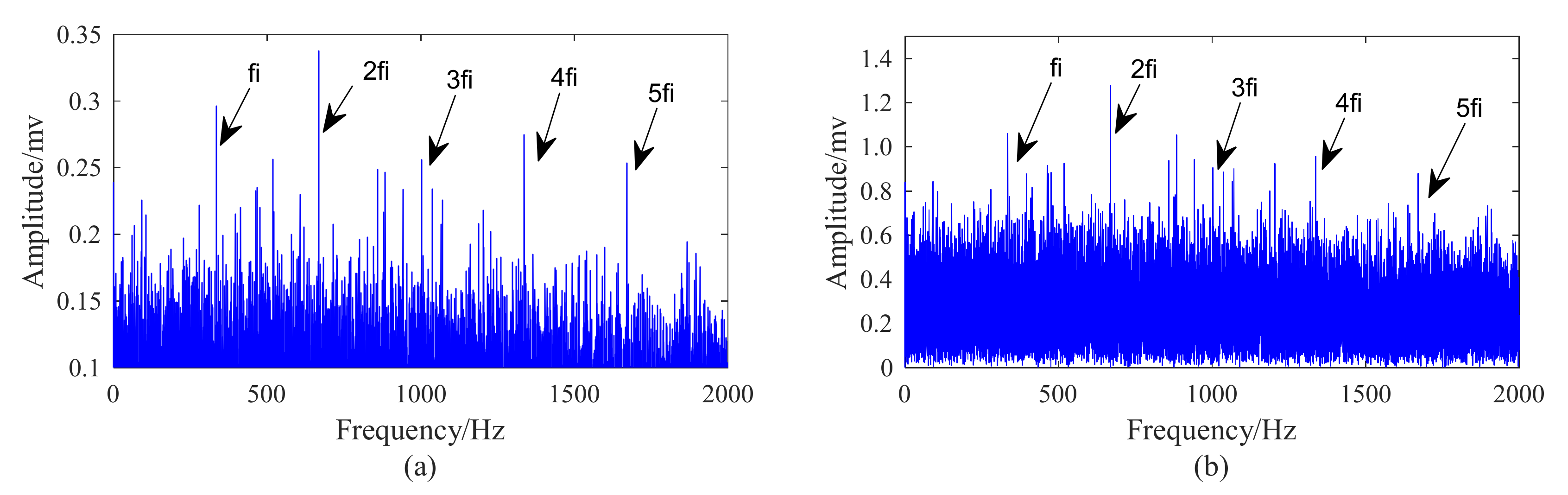
4.4. Inner Race Fault Simulation
5. Experiment
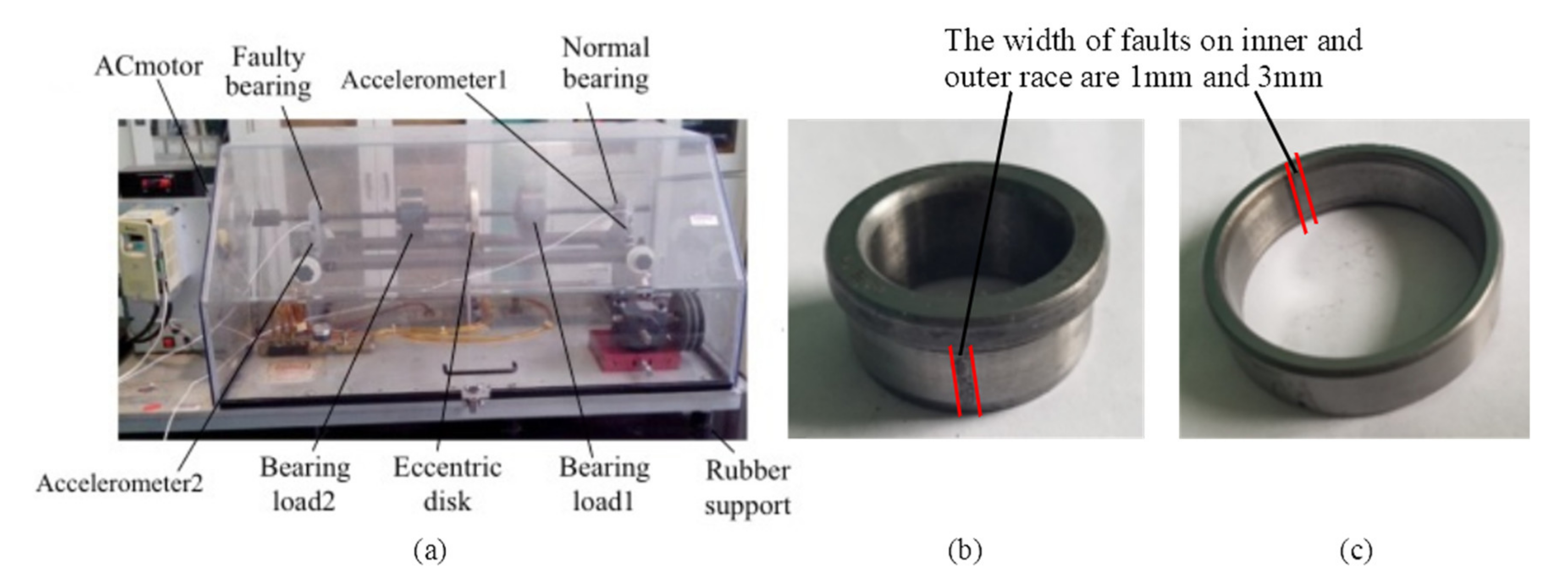
5.1. Experiment Apparatus
5.2. Case 1: Outer Race Fault with Circumferential Width of 1 mm
5.3. Case 2: Outer Race Fault with Circumferential Width of 3 mm
5.4. Case 3: Inner Race Fault with Circumferential Width of 1 mm
5.5. Case 4: Inner Race Fault With Circumferential Width of 3 mm
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jiang, L.; Shi, T.; Xuan, J. Fault diagnosis of rolling bearings based on marginal fisher analysis. J. Vib. Control 2014, 20, 470–480. [Google Scholar] [CrossRef]
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Aerospace and Automotive Applications; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Proc. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]
- Ou, L.; Yu, D.; Yang, H. A new rolling bearing fault diagnosis method based on GFT impulse component extraction. Mech. Syst. Signal Process. 2016, 81, 162–182. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Wang, R.; Huang, W. A fault diagnosis scheme for rolling bearing based on local mean decomposition and improved multiscale fuzzy entropy. J. Sound Vib. 2016, 360, 277–299. [Google Scholar] [CrossRef]
- Janjarasjitt, S.; Ocak, H.; Loparo, K.A. Bearing condition diagnosis and prognosis using applied nonlinear dynamical analysis of machine vibration signal. J. Sound Vib. 2008, 317, 112–126. [Google Scholar] [CrossRef]
- Wang, D.; Peter, W.T.; Tsui, K.L. An enhanced Kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2013, 35, 176–199. [Google Scholar] [CrossRef]
- Wang, Y.; He, Z.; Zi, Y. Enhancement of signal denoising and multiple fault signatures detecting in rotating machinery using dual-tree complex wavelet transform. Mech. Syst. Signal Process. 2010, 24, 119–137. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, X.; Du, Z.; Yan, R. Kurtosis based weighted sparse model with convex optimization technique for bearing fault diagnosis. Mech. Syst. Signal Process. 2016, 80, 349–376. [Google Scholar] [CrossRef]
- Cui, L.; Wang, X.; Wang, H.; Wu, N. Improved fault size estimation method for rolling element bearings based on concatenation dictionary. IEEE Access 2019, 7, 22710–22718. [Google Scholar] [CrossRef]
- Jayaswal, P.; Wadhwani, A.K. Application of artificial neural networks, fuzzy logic and wavelet transform in fault diagnosis via vibration signal analysis: A review. Aust. J. Mech. Eng. 2009, 7, 157–171. [Google Scholar] [CrossRef]
- He, W.; Zi, Y.; Chen, B.; Wu, F.; He, Z. Automatic fault feature extraction of mechanical anomaly on induction motor bearing using ensemble super-wavelet transform. Mech. Syst. Signal Process. 2015, 54, 457–480. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, W.; Yan, S. A novel image enhancement algorithm based on stationary wavelet transform for infrared thermography to the de-bonding defect in solid rocket motors. Mech. Syst. Signal Process. 2015, 62, 366–380. [Google Scholar] [CrossRef]
- Yu, D.; Cheng, J.; Yang, Y. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Process. 2005, 19, 259–270. [Google Scholar] [CrossRef]
- Feng, Z.; Zuo, M.J.; Hao, R.; Chu, F.; Lee, J. Ensemble empirical mode decomposition-based Teager energy spectrum for bearing fault diagnosis. J. Vib. Acoust. 2013, 135, 031013. [Google Scholar] [CrossRef]
- Gilles, J. Empirical wavelet transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Gilles, J.; Tran, G.; Osher, S. 2D empirical transforms. Wavelets, ridgelets, and curvelets revisited. SIAM J. Imaging Sci. 2014, 7, 157–186. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Maheshwari, S.; Pachori, R.B.; Acharya, U.R. Automated diagnosis of glaucoma using empirical wavelet transform and correntropy features extracted from fundus images. IEEE J. Biomed. Health Inform. 2017, 21, 803–813. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; Pachori, R.B. A multivariate approach for patient-specific EEG seizure detection using empirical wavelet transform. IEEE Trans. Biomed. Eng. 2017, 64, 2003–2015. [Google Scholar] [CrossRef]
- Hu, Y.; Li, F.; Li, H.; Liu, C. An enhanced empirical wavelet transform for noisy and non-stationary signal processing. Dig. Signal Process. 2017, 60, 220–229. [Google Scholar] [CrossRef]
- Mao, J.; Li, H. Gear fault diagnosis based on empirical wavelet transform. J. Residuals Sci. Technol. 2016, 13, 152–157. [Google Scholar]
- Cao, H.; Fan, F.; Zhou, K.; He, Z. Wheel-bearing fault diagnosis of trains using empirical wavelet transform. Measurement 2016, 82, 439–449. [Google Scholar] [CrossRef]
- Wang, H.; Wang, P.; Song, L.; Ren, B.; Cui, L. A novel feature enhancement method based on improved constraint model of online dictionary learning. IEEE Access 2019, 7, 17599–17607. [Google Scholar] [CrossRef]
- Kong, Y.; Wang, T.Y.; Chu, F.L. Meshing frequency modulation assisted empirical wavelet transform for fault diagnosis of wind turbine planetary ring gear. Renew. Energy 2018, 132, 1373–1388. [Google Scholar] [CrossRef]
- Xu, Y.; Zhang, K.; Ma, C.; Li, X.; Zhang, J. An improved empirical wavelet transform and its applications in rolling bearing fault diagnosis. Appl. Sci. 2018, 8, 2352. [Google Scholar] [CrossRef]
- Xu, Y.; Tian, W.; Zhang, K.; Ma, C. Application of enhanced fast kurtogram based on empirical wavelet transform for bearing fault diagnosis. Meas. Sci. Technol. 2019, 30, 3. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, Y.; Yi, C. Sparsity guided empirical wavelet transform for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2018, 101, 292–308. [Google Scholar] [CrossRef]
- Ge, M.T.; Wang, J.; Zhang, F.F.; Bai, K. A Novel fault diagnosis method of rolling bearings based on AFEWT-KDEMI. Entropy 2018, 20, 455. [Google Scholar] [CrossRef]
- Bhattacharyya, A.; Singh, L. Fourier–Bessel series expansion based empirical wavelet transform for analysis of non-stationary signals. Digit. Signal Process. 2018, 78, 185–192. [Google Scholar] [CrossRef]
- Ding, J.M.; Ding, C.C. Automatic detection of a wheelset bearing fault using a multi-level empirical wavelet transform. Measurement 2018, 134, 179–192. [Google Scholar] [CrossRef]
- Amezquita-Sanchez, J.P.; Adeli, H. A new music-empirical wavelet transform methodology for time–frequency analysis of noisy nonlinear and non-stationary signals. Dig. Signal Process. 2015, 45, 55–68. [Google Scholar] [CrossRef]
- Pan, J.; Chen, J.; Zi, Y.; Li, Y.; He, Z. Mono-component feature extraction for mechanical fault diagnosis using modified empirical wavelet transform via data-driven adaptive Fourier spectrum segment. Mech. Syst. Signal Process. 2016, 72, 160–183. [Google Scholar] [CrossRef]
- Chen, J.; Pan, J.; Li, Z.; Zi, Y.; Chen, X. Generator bearing fault diagnosis for wind turbine via empirical wavelet transform using measured vibration signals. Renew. Energy 2016, 89, 80–92. [Google Scholar] [CrossRef]
- Shi, P.; Yang, W.; Sheng, M.; Wang, M. An enhanced empirical wavelet transform for features extraction from wind turbine condition monitoring signals. Energies 2017, 10, 972. [Google Scholar] [CrossRef]
- Gao, Z.; Lin, J.; Wang, X.; Xu, X. Bearing fault detection based on empirical wavelet transform and correlated kurtosis by acoustic emission. Materials 2017, 10, 571. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Han, Q.; Chu, F.; Feng, Z. Vibration based condition monitoring and fault diagnosis of wind turbine planetary gearbox: A review. Mech. Syst. Signal Process 2019, 126, 662–685. [Google Scholar] [CrossRef]
- Braun, S. Mechanical Signature Analysis: Theory and Applications; Academic Press: Waltham, MA, USA, 1986. [Google Scholar]
- Barszcz, T.; JabŁoński, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the Kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Dyer, D.; Stewart, R.M. Detection of rolling element bearing damage by statistical vibration analysis. J. Mech. Des. 1978, 100, 229–235. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: a useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Wang, T.; Liang, M.; Li, J.; Cheng, W. Rolling element bearing fault diagnosis via fault characteristic order (FCO) analysis. Mech. Syst. Signal Process. 2014, 45, 139–153. [Google Scholar] [CrossRef]
- Li, Y.; Li, G.; Yang, Y.; Liang, X.; Xu, M. A fault diagnosis scheme for planetary gearboxes using adaptive multi-scale morphology filter and modified hierarchical permutation entropy. Mech. Syst. Signal Process. 2018, 105, 319–337. [Google Scholar] [CrossRef]
- Zhou, S.; Zuo, L. Nonlinear dynamic analysis of asymmetric tristable energy harvesters for enhanced energy harvesting. Commun. Nonlinear Sci. Numer. Simulat. 2018, 61, 271–284. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, J.; Wang, J.; Du, W.; Wang, J.; Han, X.; He, G. A novel fault diagnosis method of gearbox based on maximum kurtosis spectral entropy deconvolution. IEEE Access 2019, 7, 29520–29532. [Google Scholar] [CrossRef]
- Wang, Z.; Du, W.; Wang, J.; Zhou, J.; Han, X.; Zhang, Z.; Huang, L. Research and application of improved adaptive MOMEDA fault diagnosis method. Measurement 2019, 140, 63–75. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, J.; Zhan, C.; He, J.; Wang, W. Reconstructed order analysis-based vibration monitoring under variable rotation speed by using multiple blade tip-timing sensors. Sensors 2018, 18, 3235. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, Z.; Sun, R.; Chen, X. Data-driven multiscale sparse representation for bearing fault diagnosis in wind turbine. Wind Energy 2019, 22, 587–604. [Google Scholar] [CrossRef]
- Daubechies, I. Ten Lectures on Wavelets; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1992. [Google Scholar]
- Cui, L.; Huang, J.; Zhang, F.; Chu, F. HVSRMS localization formula and localization law: Localization diagnosis of a ball bearing outer ring fault. Mech. Syst. Signal Process. 2019, 120, 608–629. [Google Scholar] [CrossRef]
- Cui, L.; Huang, J. Quantitative and localization diagnosis of a defective ball bearing based on vertical-horizontal synchronization signal analysis. IEEE Trans. Ind. Electron 2017, 64, 8695–8705. [Google Scholar] [CrossRef]
- Song, L.; Wang, H.; Chen, P. Vibration-based intelligent fault diagnosis for roller bearings in low-speed rotating machinery. IEEE Trans. Instrum. Meas. 2018, 2018. 67, 1887–1899. [Google Scholar] [CrossRef]
- Li, C.; Liang, M.; Wang, T. Criterion fusion for spectral segmentation and its application to optimal demodulation of bearing vibration signals. Mech. Syst. Signal Process. 2015, 64, 132–148. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. A stochastic model for simulation and diagnostics of rolling element bearings with localized faults. J. Vib. Acoust. 2003, 125, 282–289. [Google Scholar] [CrossRef]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Ming, A.; Zhang, W.; Liu, T.; Chu, F.; Li, Y. Fault Feature Extraction and Enhancement of Rolling Element Bearings Based on Maximum Correlated Kurtosis Deconvolution and Improved Empirical Wavelet Transform. Appl. Sci. 2019, 9, 1876. https://doi.org/10.3390/app9091876
Li Z, Ming A, Zhang W, Liu T, Chu F, Li Y. Fault Feature Extraction and Enhancement of Rolling Element Bearings Based on Maximum Correlated Kurtosis Deconvolution and Improved Empirical Wavelet Transform. Applied Sciences. 2019; 9(9):1876. https://doi.org/10.3390/app9091876
Chicago/Turabian StyleLi, Zheng, Anbo Ming, Wei Zhang, Tao Liu, Fulei Chu, and Yin Li. 2019. "Fault Feature Extraction and Enhancement of Rolling Element Bearings Based on Maximum Correlated Kurtosis Deconvolution and Improved Empirical Wavelet Transform" Applied Sciences 9, no. 9: 1876. https://doi.org/10.3390/app9091876