Effects of Temperatures and Viscosity of the Hydraulic Oils on the Proportional Valve for a Rice Transplanter Based on PID Control Algorithm

 ,
,  ,
,  ,
, 

Abstract
:1. Introduction
2. Materials and Methods
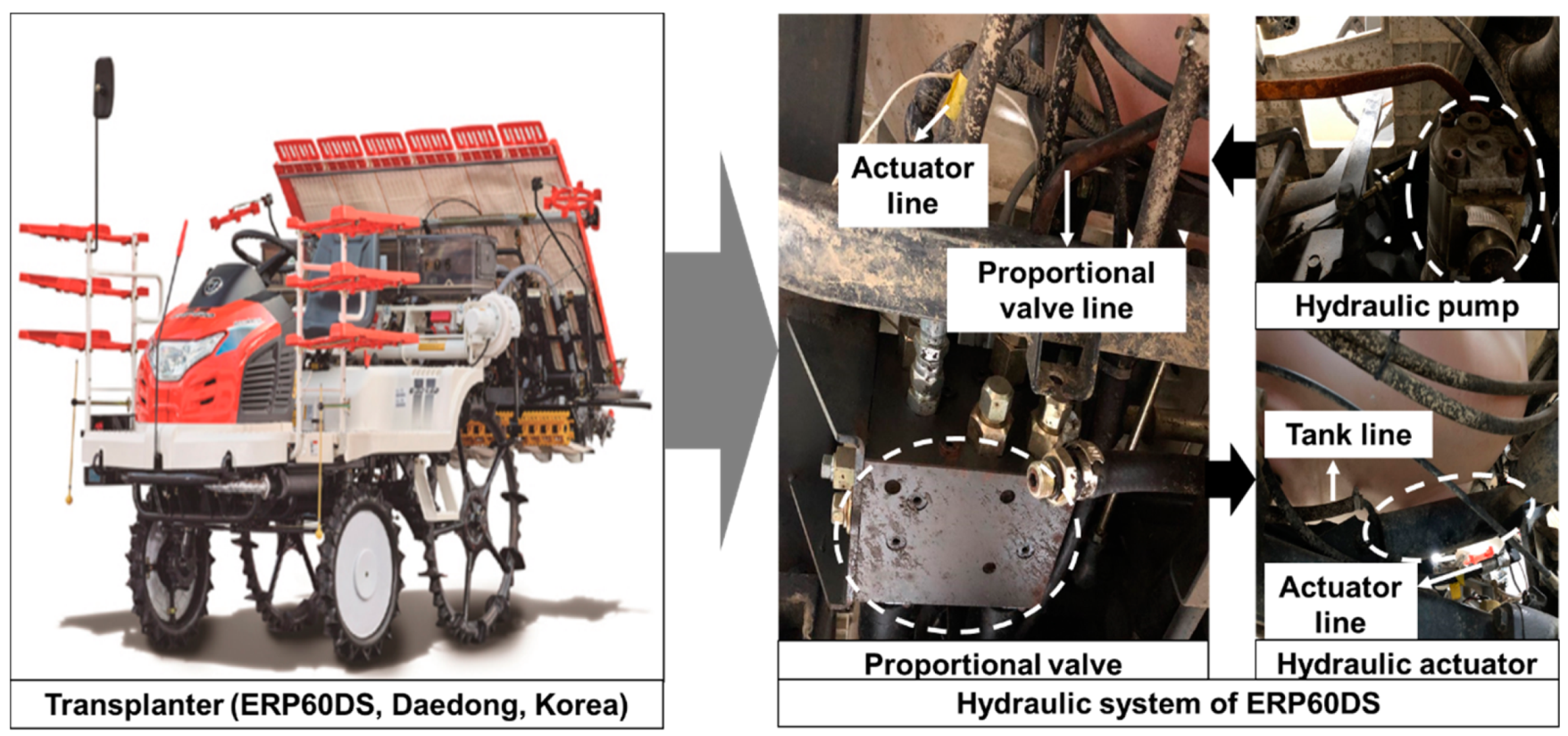
2.1. Rice Transplanter
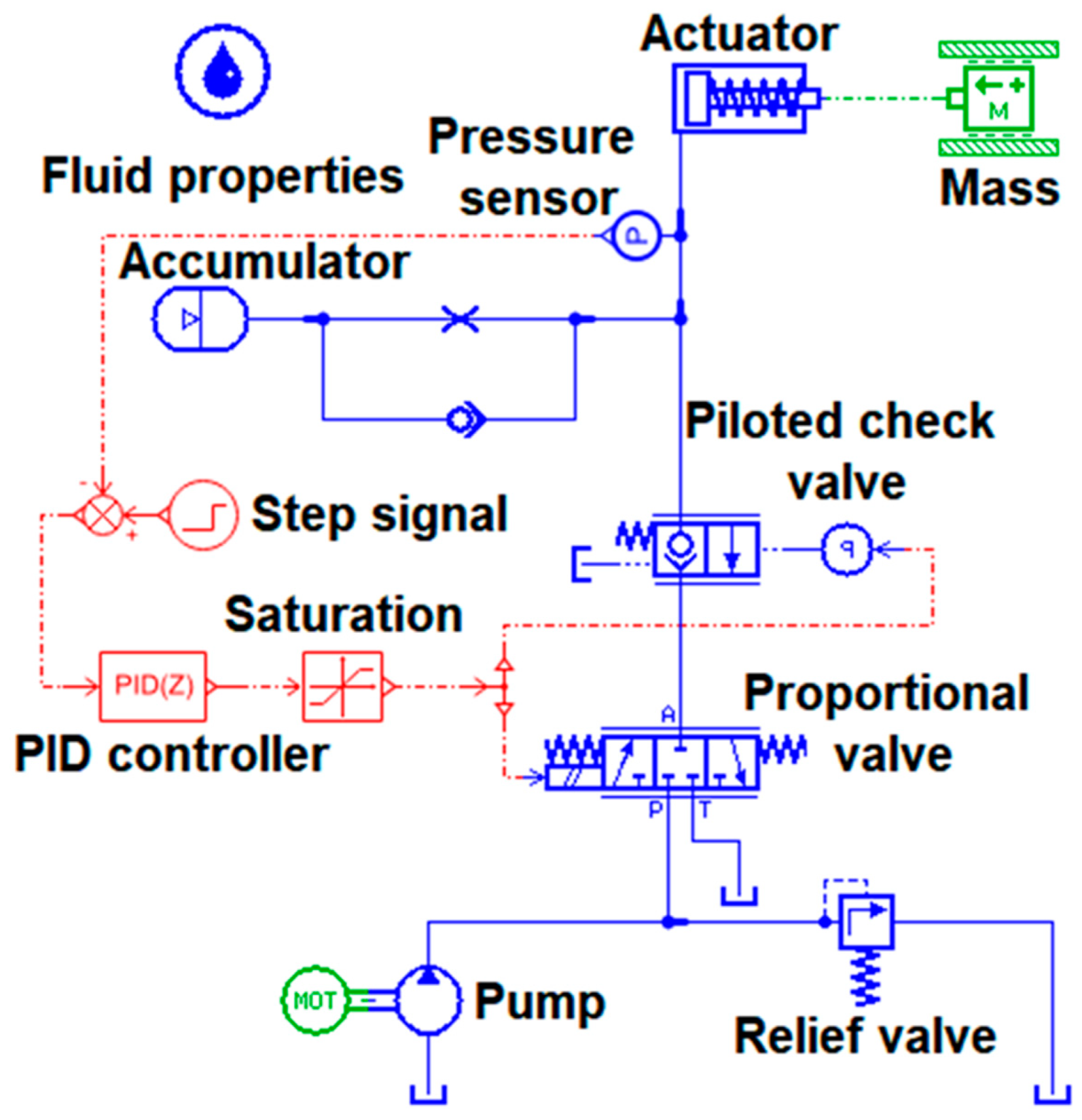
2.2. Simulation Model of the Planting Depth Control System
2.3. Design of the PID Control Algorithm
2.3.1. PID Control Algorithm without Considering Viscosity
2.3.2. PID Control Algorithm Considering Viscosity
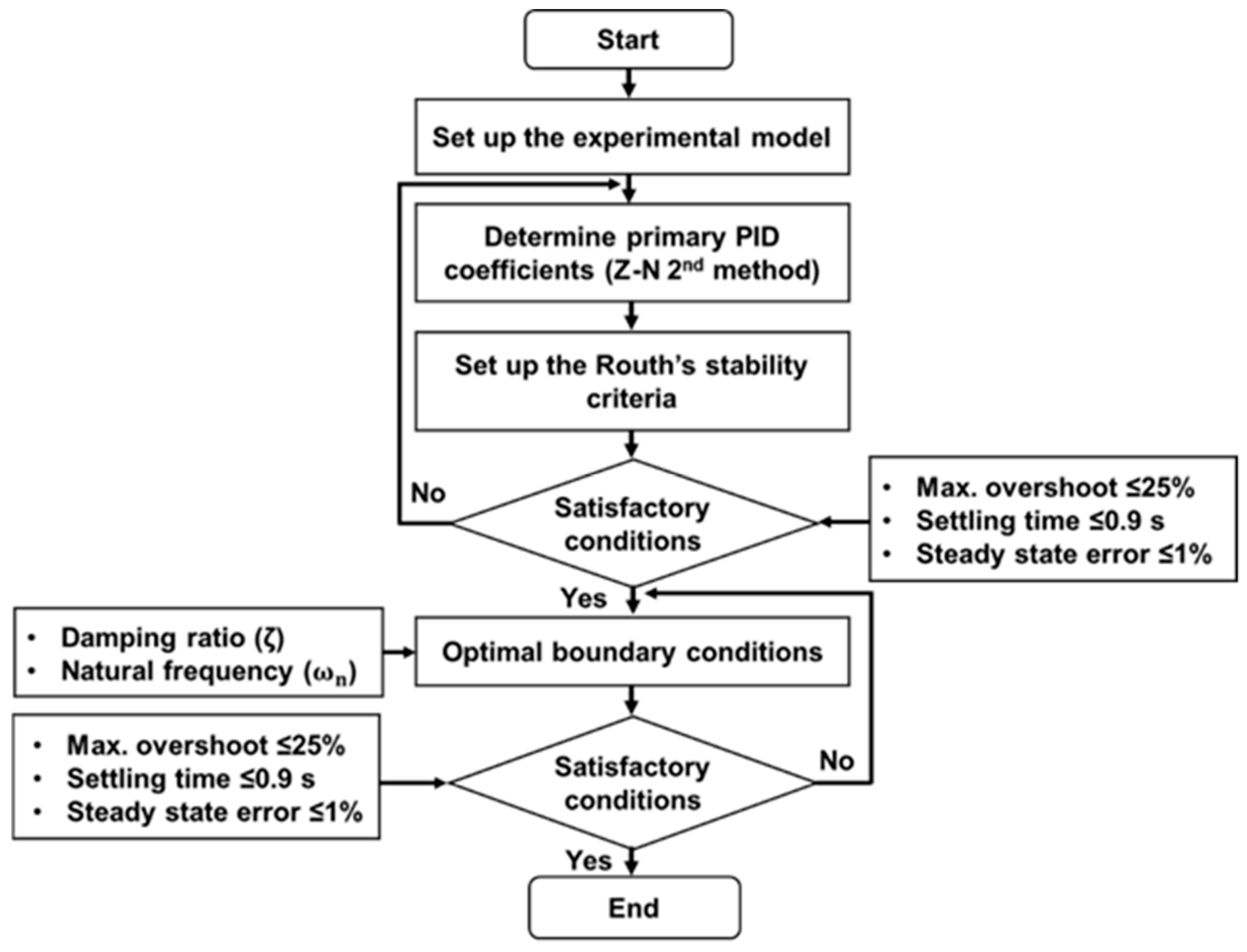
2.4. Initial Coefficients of PID Control Algorithm Considering Viscosity
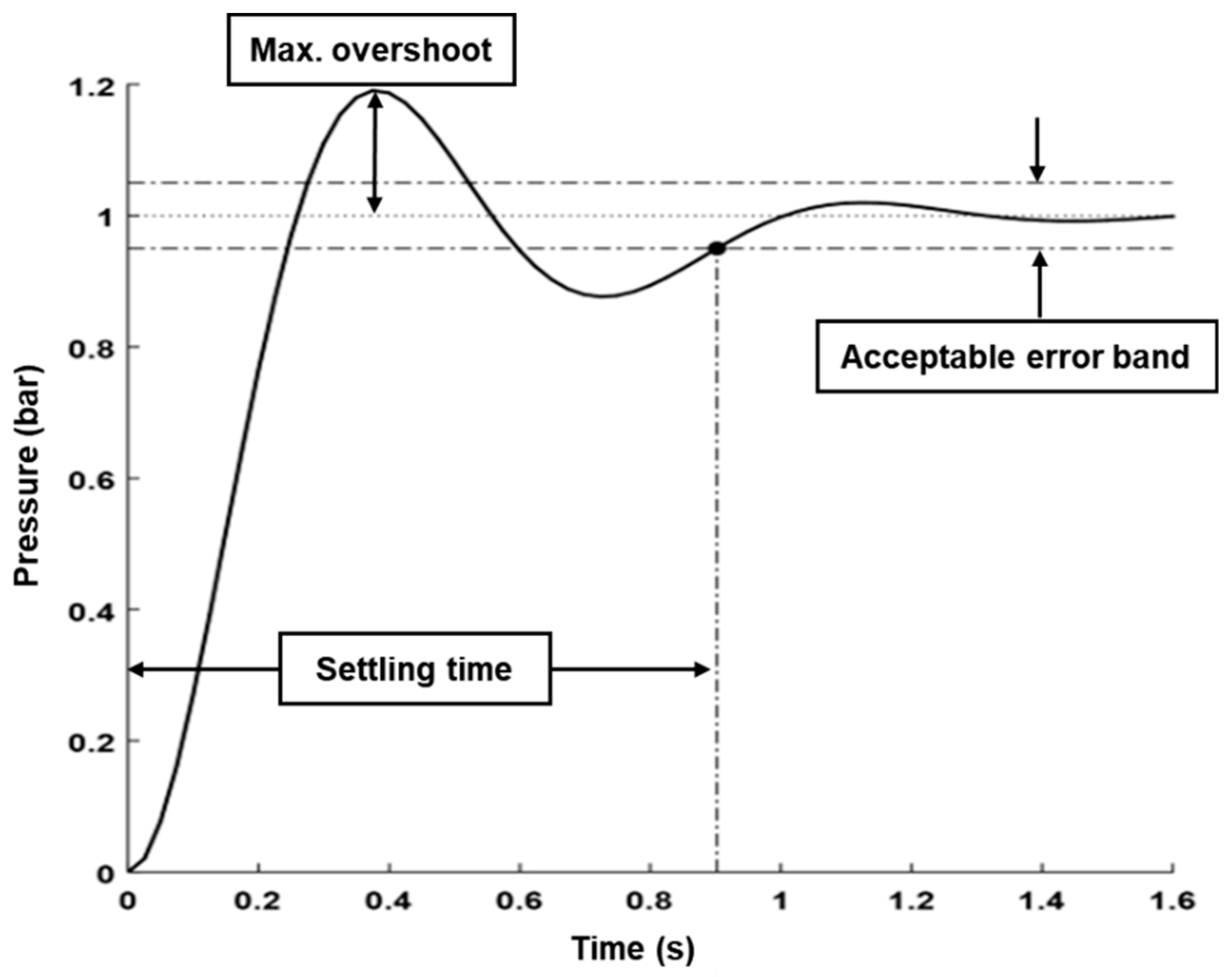
2.5. Performance Evaluation of the Control Algorithms
2.6. Analysis Methods
3. Results and Discussion
3.1. PID Coefficients for PID Control Algorithm Considering Viscosity
3.2. Performance of PID Control Algorithms
4. Conclusions
- The PID control algorithm without considering viscosity shows a higher settling time than the boundary condition for various hydraulic oils. Therefore, this control algorithm cannot control the automatic depth control system.
- In the case of the control algorithm considering viscosity, the PID coefficients were determined to be Kp = 15, Ti = 10.75, and Td = 0.43 at a damping ratio of ζ= 0.8. The maximum overshoot and settling time of the primary response were almost 19.90% and 0.90 s, accordingly, whereas the steady-state error was 0%.
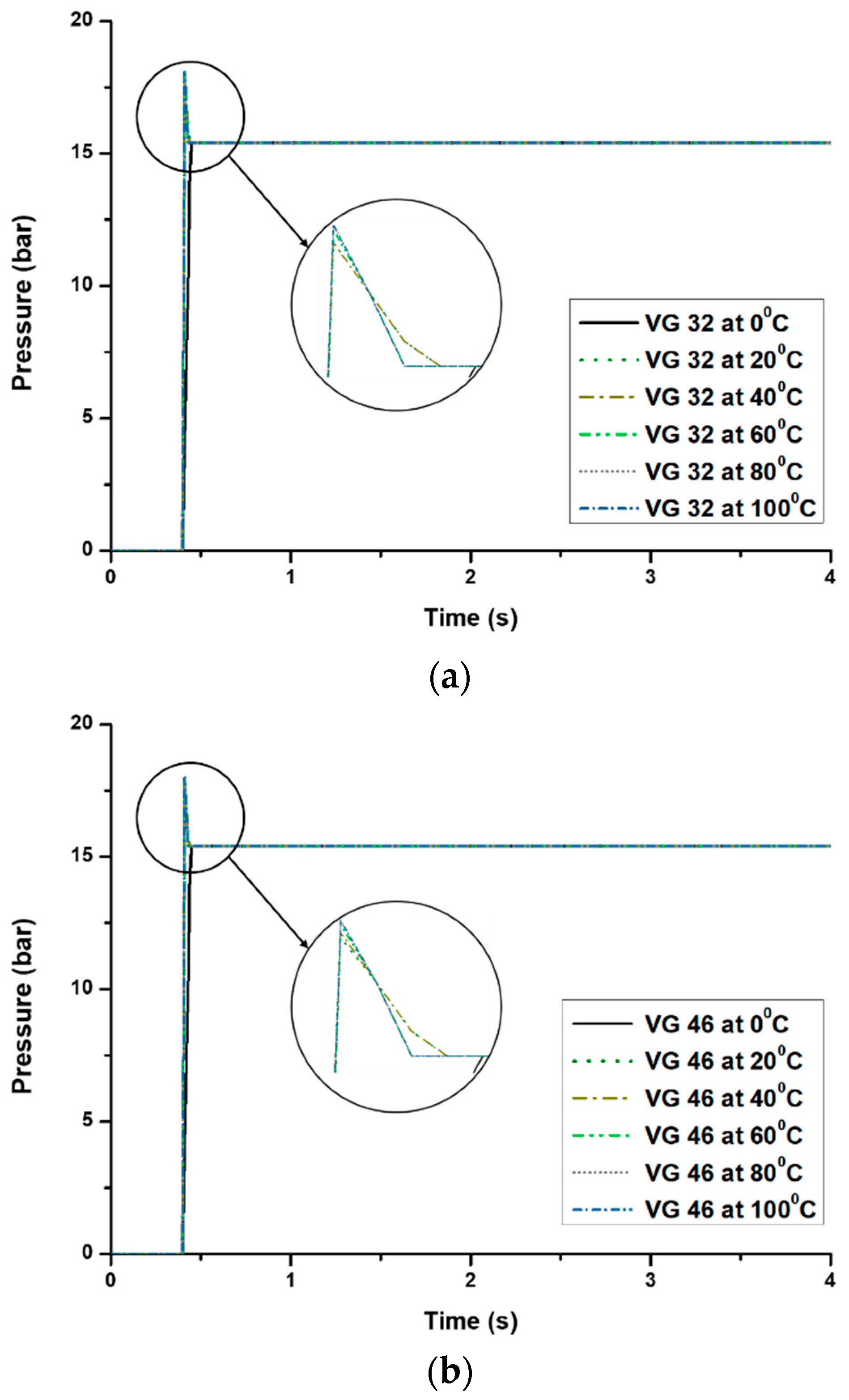
- It was identified that the maximum pressures of the proportional valve were constant for all conditions, accounting for 15.405 bars.
- The maximum overshoot was found to be 17.50% at 100 °C for VG 32 and the settling time was 0.45 s at 0 °C for all of the hydraulic oils, which satisfied the boundary conditions.
Author Contributions
Funding
Conflicts of Interest
References
- Goldstein Research. Available online: https://www.goldsteinresearch.com/report/rice-transplanter-market-outlook-2024-global-opportunity-and-demand-analysis-market-forecast-2016-2024 (accessed on 9 January 2020).
- Kim, W.S.; Kim, Y.S.; Kim, Y.J.; Choi, C.H.; Inoue, E.; Okayasu, T. Analysis of the load of a transplanter PTO shaft based on the planting distance. J. Fac. Agric. Kyushu Univ. 2018, 63, 97–102. [Google Scholar]
- Kim, Y.S.; Lee, P.U.; Kim, W.S.; Kwon, O.W.; Kim, C.W.; Lee, K.H.; Kim, Y.J. Strength analysis of a PTO (Power Take-Off) gear-Train of a multi-Purpose cultivator during a rotary ditching operation. Energies 2019, 12, 1100. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.C.; Shin, S.Y.; Kang, C.H.; Kim, B.G.; Kim, J.O. Current status of agricultural mechanization in South Korea. In Proceedings of the 2015 ASABE Annual International Meeting, New Orleans, LA, USA, 26–29 July 2015; ASABE: St. Joseph, MI, USA, 2015. Paper No. 152189653. [Google Scholar]
- Sanusan, S.; Polthanee, A.; Audebert, A.; Seripong, S.; Mouret, J.C. Growth and Yield of Rice (Oryza sativa L.) as affected by Cultivars, Seeding Depth and Water Deficits at Vegetative Stage. Asian J. Plant Sci. 2010, 9, 36–43. [Google Scholar] [CrossRef] [Green Version]
- Bozorgi, H.R.; Faraji, A.; Danesh, R.K. Effect of plant density on yield and yield components of rice. World Appl. Sci. J. 2011, 12, 2053–2057. [Google Scholar]
- Huang, J.; Wang, X.; Wang, H.; Hao, H. Development of a flow control valve with digital flow compensator. Flow Meas. Instrum. 2019, 66, 157–169. [Google Scholar] [CrossRef]
- Lisowski, E.; Filo, G.; Rajda, J. Analysis of Flow forces in the initial phase of throttle gap opening in a proportional control valve. Flow Meas. Instrum. 2018, 59, 157–167. [Google Scholar] [CrossRef]
- Lisowski, E.; Filo, G.; Rajda, J. Pressure compensation using flow forces in a multi-section proportional directional control valve. Energy Convers. Manag. 2015, 103, 1052–1064. [Google Scholar] [CrossRef]
- Jeong, Y.H.; Park, T.J. THD analysis of a hydraulic servo valve using CFD. J. Korean Soc. Fluid Constr. Equip. 2014, 11, 8–13. [Google Scholar]
- Zardan, B.; Borghi, M.; Cillo, G.; Rinaldini, C.A.; Mattarelli, E. Design of two-stage On/Off cartridge valves for mobile applications. Energy Procedia 2017, 126, 1123–1130. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Gu, L.; Chen, Y. A continuously variable hydraulic pressure converter based on high-Speed on–Off valves. Mechatronics 2011, 21, 1298–1308. [Google Scholar] [CrossRef]
- Lian, H.; Xiwen, L.; Zuoxi, Z.; Zhigang, Z.; Junwan, H.; Bin, C. Design of electronic control device and control algorithm for rice transplanter. Trans. CSAE 2009, 25, 118–122, (In Chinese, with English abstract). [Google Scholar]
- Wei, L.; Zhang, X.; Jia, Q.; Liu, Y. Automatic Navigation System Research for PZ60 Rice Planter. In Computer and Computing Technologies in Agriculture VIII; Li, D., Chen, Y., Eds.; Springer: Cham, Switzerland, 2015; Volume 452, pp. 653–661. [Google Scholar]
- Liu, J.Y.; Tan, J.Q.; Mao, E.R.; Song, Z.H.; Zhu, Z.X. Proportional directional valve based automatic steering system for tractors. Front. Inf. Technol. Electron. Eng. 2016, 17, 458–464. [Google Scholar] [CrossRef]
- Siddique, M.A.A. Simulation Model of the Automatic Planting Depth Control System for Rice Transplanter Using Proportional Valve. Master’s Thesis, Chungnam National University, Daejeon, Korea, June 2019. [Google Scholar]
- Manzone, M. Performance of an electric control system for hydraulically driven forestry tandem trailers. Biosyst. Eng. 2015, 130, 106–110. [Google Scholar] [CrossRef] [Green Version]
- Raikwar, S.; Tewari, V.K.; Mukhopadhyay, S.; Verma, C.R.B.; Rao, M.S. Simulation of components of a power shuttle transmission system for an agricultural tractor. Comput. Electron. Agric. 2015, 114, 114–124. [Google Scholar] [CrossRef]
- Foster, C.A.; Strosser, R.P.; Peters, J.; Sun, J.Q. Automatic velocity control of a self-Propelled windrower. Comput. Electron. Agric. 2005, 47, 41–58. [Google Scholar] [CrossRef]
- Saeys, W.; Engelen, K.; Ramon, H.; Anthonis, J. An automatic depth control system for shallow manure injection, Part 1: Modelling of the depth control system. Biosyst. Eng. 2007, 98, 146–154. [Google Scholar] [CrossRef]
- Saeys, W.; Deblander, J.; Ramon, H.; Anthonis, J. High-Performance flow control for site-Specific application of liquid manure. Biosyst. Eng. 2008, 99, 22–34. [Google Scholar] [CrossRef]
- Siddique, M.A.A.; Kim, W.S.; Beak, S.Y.; Kim, Y.J.; Choi, C.H. Simulation of hydraulic system of the rice transplanter with AMESim software. In Proceedings of the 2018 ASABE Annual International Meeting, Detroit, MI, USA, 29 July–1 August 2018; ASABE: St. Joseph, MI, USA, 2018. Paper No. 201800981. [Google Scholar]
- Anderson, W.R. Controlling Electrohydraulic Systems, 1st ed.; Marcel dekker: New York, NY, USA, 1988. [Google Scholar]
- Zhang, Q. Hydraulic linear actuator velocity control using a feedforward-plus-PID control. Int. J. Flex. Autom. Integr. Manuf. 1999, 7, 277–292. [Google Scholar]
- Feng, B.; Gong, G.; Yang, H. Self-Tuning parameter fuzzy PID temperature control in a large hydraulic system. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009. [Google Scholar]
- Lui, Z.; Hu, X.; Li, X. Study on fuel oil temperature PID control system and simulation. In Proceedings of the 2012 2nd International Conference on Consumer Electronics, Communications and Networks (CECNet), Yichang, China, 21–23 April 2012. [Google Scholar]
- Chen, Z.; Wang, W. Analysis of temperature characteristics of electrohydraulic servo valve based on AMESim. In Proceedings of the International Conference of Mechanical, Electrical, Electronic Engineering & Science (MEEES 2018), Chongqing, China, 26–27 May 2018. [Google Scholar]
- Javalagi, S.; Singireddy, S.R. Hydraulic Fluid Properties and Its Influence on System Performance. Master’s Thesis, Linköping University, Linköping, Sweden, 2012. [Google Scholar]
- Huang, H.; Zhang, S.; Yang, Z.; Tian, Y.; Zhao, X.; Yuan, Z.; Hao, S.; Leng, J.; Wei, Y. Modified smith fuzzy PID temperature control in oil-Replenishing device for deep-sea hydraulic system. Ocean Eng. 2018, 149, 14–22. [Google Scholar] [CrossRef]
- Mahmood, Q.A.; Nawaf, A.T.; Esmael, M.N.; Abdulateef, L.T.; Dahham, O.S. PID temperature control of demineralized water tank. IOP Conf. Ser. Mater. Sci. Eng. 2018, 454, 1–10. [Google Scholar] [CrossRef]
- Han, C.; Hwang, Y.H.; Choi, S.B. Tracking control of a spool displacement in a direct piezoactuator driven servo valve system. Front. Mater. 2017, 4, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Abdelaziz, H.O.; Ahmed, M.M.; Mahmoud, D. Effect of viscous friction coefficients variation on robot’s joint PID control. Int. J. Eng. Manag. Humanit. Soc. Sci. Paradig. (IJEMHS) 2016, 21, 11–14. [Google Scholar]
- Heo, Y.J.; Kang, J.; Kim, M.J.; Chung, W.K. Tuning free controller to accurately regulate flow rates in a microfluidic network. Sci. Rep. 2016, 6, 23273. [Google Scholar] [CrossRef] [PubMed]
- Nam, D.N.C.; Tri, N.M.; Park, H.G.; Ahn, K.K. Position control of electro hydraulic actuator (EHA) using an iterative learning control. J. Korean Soc. Fluid Constr. Equip. 2014, 11, 1–7. [Google Scholar]
- Bravo, W.A.; Canuto, E.; Agostani, M.; Bonadei, M. Proportional electrohydraulic valves: An embedded model control solution. Control Eng. Pract. 2017, 62, 22–35. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering, 4th ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 2002; pp. 681–751. [Google Scholar]
- Anthonis, J.; Mouazen, A.M.; Saeys, W.; Ramon, H. An Automatic Depth Control System for Online Measurement of Spatial Variation in Soil Compaction, Part 3: Design of Depth Control System. Biosyst. Eng. 2004, 89, 59–67. [Google Scholar] [CrossRef]
- Condon, S.F.; Ward, S.M.; Holden, N.M.; McGee, A. The Development of a Depth Control System for a Peat Milling Machine, Part I: Sensor Development. J. Agric. Eng. Res. 2001, 80, 127–137. [Google Scholar] [CrossRef]
- Lee, J.; Yamazaki, M.; Oida, A.; Nakashima, H.; Shimizu, H. Electro-Hydraulic tillage depth control system for rotary implements mounted on agricultural tractor Design and response experiments of control system. J. Terramechanics 1998, 35, 229–238. [Google Scholar] [CrossRef]
- Søgaard, H.T. Automatic Control of a Finger Weeder with Respect to the Harrowing Intensity at Varying Soil Structures. J. Agric. Eng. Res. 1998, 70, 157–163. [Google Scholar] [CrossRef]
- Weatherly, E.T.; Bowers, C.G. Automatic depth control of a seed planter based on soil drying front sensing. Trans. ASAE 1997, 40, 295–305. [Google Scholar] [CrossRef]
- Siddique, M.A.A.; Kim, W.S.; Baek, S.Y.; Kim, Y.S.; Choi, C.H.; Kim, Y.J.; Park, J.K. Determination of PID coefficients for the ascending and descending system using proportional valve of a rice transplanter. J. Biosyst. Eng. 2018, 43, 331–341. [Google Scholar]
- Busquets, E.; Ivantysynova, M. Temperature prediction of displacement controlled multi-Actuator machines. Int. J. Fluid Power 2013, 14, 25–36. [Google Scholar] [CrossRef]
- Park, Y.N.; Kim, D.C.; Park, S.J. Delayed operation characteristics of power shuttle according to hydraulic oil temperature in the hydraulic circuit of agricultural tractor. J. Biosyst. Eng. 2015, 40, 95–101. [Google Scholar] [CrossRef] [Green Version]
- Wallman, N.; Lindblad, K. Single Acting Hydraulic Cylinder; Wallmek I Kungälv AB: Kungalv, Sweden, 2017; No. US20170102013A1. [Google Scholar]
- Amirante, R.; Lippolis, A.; Tamburrano, P. Theoretical and experimental analysis of a coupled system proportional control valve and hydraulic cylinder. Univ. J. Eng. Sci. 2013, 1, 45–56. [Google Scholar]
- Kim, Y.J.; Chung, S.O.; Lee, D.H.; Choi, C.H.; Kim, W.S. Automatic clutch control for automated transmission of agricultural tractor. In Proceedings of the 8th International Symposium on Machinery and Mechatronics for Agriculture and Biosystems Engineering (ISMAB), Niigata, Japan, 23–25 May 2016. [Google Scholar]
- Jantzen, J.; Jakobsen, C. Tuning PID controller tuning into a simple consideration of settling time. In Proceedings of the 2016 European Control Conference (ECC), Aalborg, Denmark, 29 June–1 July 2016. [Google Scholar] [CrossRef]
- He, X.; Cui, T.; Zhang, D.; Wei, J.; Wang, M.; Yu, Y.; Liu, Q.; Yan, B.; Zhao, D.; Yang, L. Development of an electric-Drive control system for a precision planter on a closed-Loop PID algorithm. Comput. Electron. Agric. 2017, 136, 184–192. [Google Scholar] [CrossRef]
- Gapinski, R.E. All-Weather Tractor Hydraulic Fluid Using a Mixture of Viscosity Modifier Types to Meet Shear-Stable Ultigrade Viscosity Requirements. U.S. Patent No. US7189682 B2, 13 March 2007. [Google Scholar]
- Krisnangkura, K.; Yimsuwan, T.; Pairintra, R. Am empirical approach in predicting biodiesel viscosity at various temperatures. Fuel 2006, 85, 107–113. [Google Scholar] [CrossRef]
- Esteban, B.; Riba, J.R.; Baquero, G.; Rius, A.; Puig, R. Temperature dependence of density and viscosity of vegetable oils. Biomass Bioenergy 2012, 42, 164–171. [Google Scholar] [CrossRef] [Green Version]
- Wang, N.; Wang, J.; Li, Z.; Tang, X.; Hou, D. Fractional-Order PID control strategy on hydraulic-Loading system of typical electromechanical platform. Sensors 2018, 18, 3024. [Google Scholar] [CrossRef] [Green Version]
- Toscano, R. A simple robust PI/PID controller design via numerical optimization approach. J. Process Control 2005, 15, 81–88. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Le, G.; Ma, D. Adaptive integral robust control of hydraulic systems with asymptotic tracking. Mechatronics 2016, 40, 78–86. [Google Scholar] [CrossRef]
- Chen, C.P.; Chiang, M.H. Development of proportional pressure control valve for hydraulic bracking actuator of automobile ABS. Appl. Sci. 2018, 8, 639. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters | ||
|---|---|---|---|
| VG 32 | VG 46 | VG 68 | |
| Brand (model) | Kixx (RD HD) | ||
| Density kg/L at 15 °C | 0.855 | 0.860 | 0.866 |
| Kinematic viscosity (mm2/s) at 40 °C | 32 | 46.2 | 67.4 |
| Kinematic viscosity (mm2/s) at 100 °C | 114 | 112 | 109 |
| Viscosity index | 114 | 112 | 109 |
| Pour point (°C) | −39 | −36 | −27 |
| Flash point (°C) | 221 | 232 | 235 |
| Control Algorithm | Max. Overshoot (%) | Settling Time 1 (s) | Steady-State Error (%) |
|---|---|---|---|
| (Kp = 15, Ti = 10.75, and Td = 0.43) | 19.90 | 0.90 | 0 |
| Hydraulic Oils | Temperature (°C) | Parameters | Pressure (bar) |
|---|---|---|---|
| VG 32 | 0 | Max. | 15.97 |
| Avg. ± Std. Dev. | 15.15 ± 2.14 a | ||
| 20 | Max. | 15.86 | |
| Avg. ± Std. Dev. | 15.07 ± 2.15 a | ||
| 40 | Max. | 15.47 | |
| Avg. ± Std. Dev. | 14.67 ± 2.34 b | ||
| 60 | Max. | 15.44 | |
| Avg. ± Std. Dev. | 14.50 ± 2.44 b | ||
| 80 | Max. | 15.43 | |
| Avg. ± Std. Dev. | 14.48 ± 2.45 b | ||
| 100 | Max. | 15.43 | |
| Avg. ± Std. Dev. | 14.47 ± 2.45 b | ||
| VG 46 | 0 | Max. | 16.06 |
| Avg. ± Std. Dev. | 15.22 ± 2.13 a | ||
| 20 | Max. | 16.02 | |
| Avg. ± Std. Dev. | 15.18 ± 2.13 a | ||
| 40 | Max. | 15.54 | |
| Avg. ± Std. Dev. | 14.81 ± 2.26 b | ||
| 60 | Max. | 15.45 | |
| Avg. ± Std. Dev. | 14.55 ± 2.41 c | ||
| 80 | Max. | 15.44 | |
| Avg. ± Std. Dev. | 14.49 ± 2.45 c | ||
| 100 | Max. | 15.43 | |
| Avg. ± Std. Dev. | 14.48 ± 2.45 c | ||
| VG 68 | 0 | Max. | 15.95 |
| Avg. ± Std. Dev. | 15.11 ± 2.11 a | ||
| 20 | Max. | 15.94 | |
| Avg. ± Std. Dev. | 15.11 ± 2.12 a | ||
| 40 | Max. | 15.48 | |
| Avg. ± Std. Dev. | 14.76 ± 2.25 b | ||
| 60 | Max. | 15.42 | |
| Avg. ± Std. Dev. | 14.52 ± 2.41 c | ||
| 80 | Max. | 15.44 | |
| Avg. ± Std. Dev. | 14.49 ± 2.45 c | ||
| 100 | Max. | 15.43 | |
| Avg. ± Std. Dev. | 14.48 ± 2.45 c |
| Parameters | Temp. (°C) | PID Control Algorithm | |||||
|---|---|---|---|---|---|---|---|
| Without Considering Viscosity | Considering Viscosity | ||||||
| VG 32 | VG 46 | VG 68 | VG 32 | VG 46 | VG 68 | ||
| Max. overshoot. (%) ≤ 25% | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 20 | 0 | 0 | 0 | 15.30 | 15.29 | 14.70 | |
| 40 | 0 | 0 | 0 | 15.30 | 15.29 | 15.29 | |
| 60 | 0 | 0 | 0 | 16.84 | 16.26 | 15.87 | |
| 80 | 3.85 | 3.85 | 3.85 | 17.47 | 16.71 | 16.40 | |
| 100 | 3.48 | 3.48 | 3.48 | 17.50 | 16.84 | 16.72 | |
| Avg. ± Std. Dev. | 1.22 ± 1.89 | 1.22 ± 1.89 | 1.22 ± 1.89 | 13.73 ± 6.80 | 13.40 ± 6.60 | 13.16 ± 6.49 | |
| Settling time. (s) ≤ 0.5 s | 0 | 4.0 | 4.0 | 4.0 | 0.45 | 0.45 | 0.45 |
| 20 | 4.0 | 4.0 | 4.0 | 0.42 | 0.42 | 0.42 | |
| 40 | 2.70 | 2.70 | 2.70 | 0.43 | 0.43 | 0.43 | |
| 60 | 2.70 | 2.70 | 2.70 | 0.42 | 0.42 | 0.42 | |
| 80 | 2.70 | 2.70 | 2.70 | 0.42 | 0.42 | 0.42 | |
| 100 | 2.70 | 2.70 | 2.70 | 0.42 | 0.42 | 0.42 | |
| Avg. ± Std. Dev. | 3.13 ± 0.67 | 3.13 ± 0.67 | 3.13 ± 0.67 | 0.43 ± 0.01 | 0.43 ± 0.01 | 0.43 ± 0.01 | |
| Steady state error. (%) ≤ 1% | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
| 20 | 0.94 | 0.95 | 0.97 | 0 | 0 | 0 | |
| 40 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 60 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 80 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 100 | 0 | 0 | 0 | 0 | 0 | 0 | |
| Avg. ± Std. Dev. | 0.32 ± 0.50 | 0.32 ± 0.50 | 0.32 ± 0.50 | 0 | 0 | 0 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddique, M.A.A.; Kim, W.-S.; Kim, Y.-S.; Kim, T.-J.; Choi, C.-H.; Lee, H.-J.; Chung, S.-O.; Kim, Y.-J. Effects of Temperatures and Viscosity of the Hydraulic Oils on the Proportional Valve for a Rice Transplanter Based on PID Control Algorithm. Agriculture 2020, 10, 73. https://doi.org/10.3390/agriculture10030073
Siddique MAA, Kim W-S, Kim Y-S, Kim T-J, Choi C-H, Lee H-J, Chung S-O, Kim Y-J. Effects of Temperatures and Viscosity of the Hydraulic Oils on the Proportional Valve for a Rice Transplanter Based on PID Control Algorithm. Agriculture. 2020; 10(3):73. https://doi.org/10.3390/agriculture10030073
Chicago/Turabian StyleSiddique, Md. Abu Ayub, Wan-Soo Kim, Yeon-Soo Kim, Taek-Jin Kim, Chang-Hyun Choi, Hyo-Jai Lee, Sun-Ok Chung, and Yong-Joo Kim. 2020. "Effects of Temperatures and Viscosity of the Hydraulic Oils on the Proportional Valve for a Rice Transplanter Based on PID Control Algorithm" Agriculture 10, no. 3: 73. https://doi.org/10.3390/agriculture10030073