3.2. Flexible Substrate
The substrate is the dielectric material on which the patch is placed and acts as an insulator, as well as directly influences the performance of the antenna.
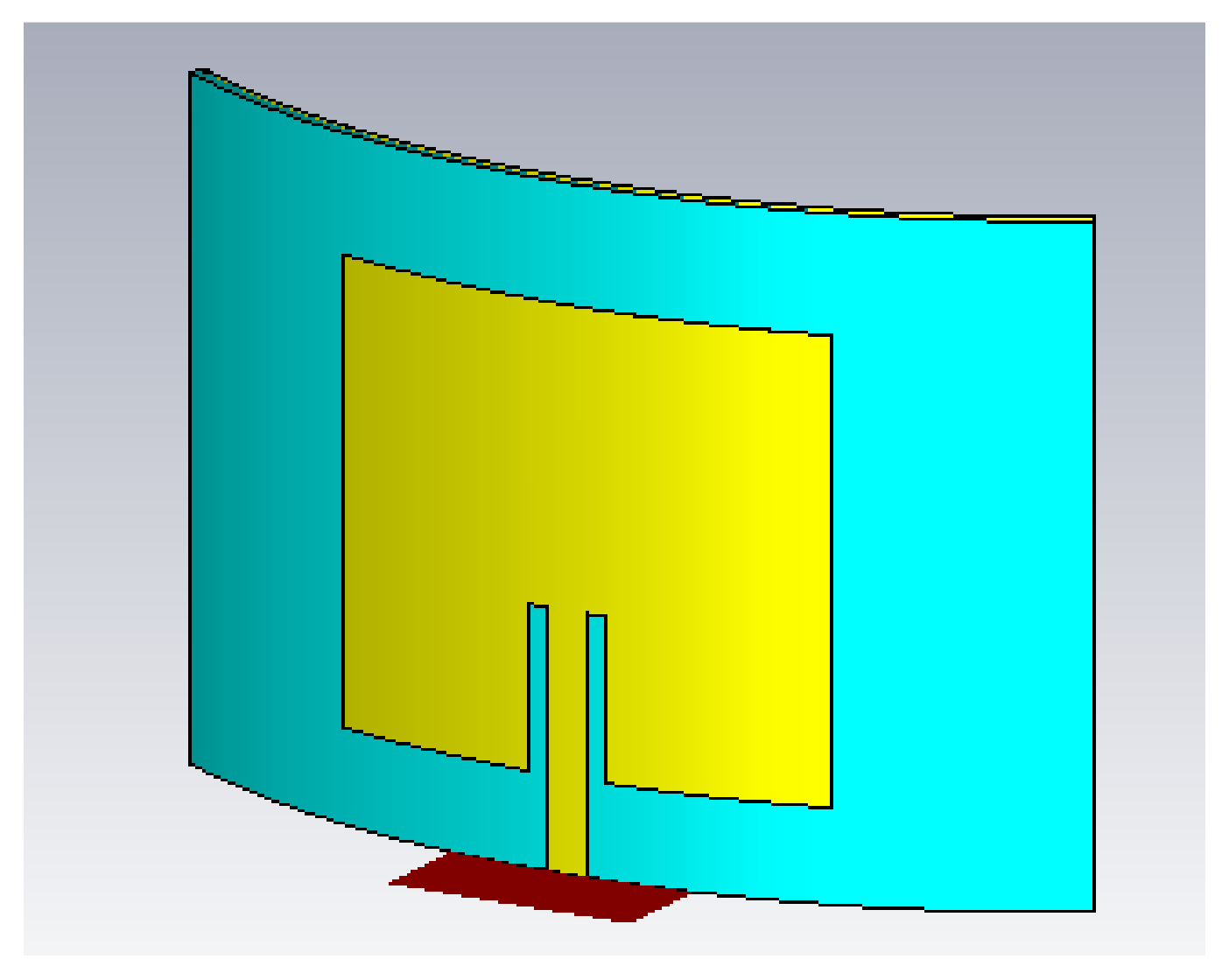
One of the most important characteristics of the substrate is that it must be flexible, because the antenna will be positioned around the body of the UAV to radiate 360 degrees. The antenna will therefore have a cylindrical shape to cover all angles of radiation. Additionally, to reduce price of the antenna, it will be created in a 3D printer.
Figure 5 shows an antenna on a curved substrate.
In the bibliography, several articles that explain their experiences with different flexible substrates manufactured in a 3D printer can be found;
In [
11], the design of a Bowtie antenna with a PET (Polyethylene terephthalate) substrate, to improve wider bandwidth, at a frequency of 4.35 GHz.
In [
12], the design of a circular patch antenna, made with an ABS (Acrylonitrile–Butadiene–Styrene) substrate in a 3D printer, at a frequency of 2.34 GHz, proving that ABS, even being a flexible material, shows better results than FR-4, which is the typical substrate used.
In [
13], a 3D antenna is designed with NinjaFlex filament, to show its potential for RF circuits.
In [
14], a study is made with different percentages of infill, different substrates, and different types of PLA antennas, concluding that the lower the percentage of infill the losses are higher at a frequency of 4 GHz.
In [
15], a microstrip patch antenna operating at 38 GHz is designed to affirm the advantages of flexible substrate antennas over others, and its low cost and ease of fabrication is well documented. A comparison of different experiments that have been performed with different antennas, frequencies, and flexible substrates is found.
In [
16], a microstrip patch antenna is designed with two substrates: ABS and NinjaFlex, which is flexible. The resonant frequency achieved is 2.305 GHz with a bandwidth of 0.12 GHz (5.21%), and when the antenna is flexed downwards, the resonant frequency shifts slightly upwards to 2.365 GHz (60 MHz) and the bandwidth is 0.13 GHz (5.71%).
In [
17], a series of planar antennas on textile substrate and fed by a microstrip transmission line were designed and constructed, comparing their performance at different frequencies between 2 to 10 GHz.
The design of patch antennas on flexible substrates for radio frequencies must take into account two main parameters such as the dielectric constant and the tangent loss; however, the thickness is also very important. Increasing the thickness results in better radiation efficiency in the antenna, higher losses in the dielectric, and an increase in surface waves.
Knowing the arrangement of the antenna around the body of the UAV, it has been taken into account that the thinner the substrate is, the lighter the UAV will be, thus increasing the durability of the suspended UAV.
We have also taken into account the procurement, manufacture, and cost of the substrate; thus, for ease of design, rapid production, and minimum expense, we chose a material that could be manufactured with a 3D printer.
Finally, two parameters that have an important role in the choice of substrate were taken into account: the dielectric constant and the loss tangent, the former being the influence produced by an electric field on a material, while the latter quantifies the loss of signal due to the dissipation of electromagnetic energy from the substrate.
Different substrates have been compared in the following table, to check the most important characteristics for our study. These characteristics are that the substrate can be manufactured with a 3D printer, low cost, a flexible substrate, and the two constraints of dielectric constant and loss tangent, which must be met, to improve the antenna performance.
In the
Table 4, a comparison between different substrates can be checked, checking the different characteristics related to the project. In the comparison, the PETG (Polyethylene terephthalate glycol) substrate stands out, which is the combination of PET with glycol, improving the interesting properties of PET with a glycolisation process, and it will be the one used to carry out the tests and check its effectiveness. The calculations from now on will be made knowing the dielectric constant and the loss tangent of the chosen substrate, PETG, which are 3 and 0.008, respectively.
3.3. Impedance Matching or Coupling
Matching networks [
35,
36] avoid reflections generated on transmission lines due to the difference between the load impedance and the characteristic impedance, i.e., a matching network allows the input impedance of the network to match the impedance of the line so that the reflection coefficient is zero. The main advantages are optimizing the power delivered to the load, optimizing power losses in the supply line, and improving the signal-to-noise ratio of the system in receivers and transmitters.
The most common methods to implement the matching network are discrete elements, lambda/4 transformers, matching stubs, or a combination of them.
In this paper, two methods to implement the matching network will be discussed, and they are used for a microstrip antenna as well: lambda/4 transformer or InsetFeed [
35,
37].
In the bibliography, a multitude of papers can be found that study a microstrip antenna or array with different designs, substrates, and frequencies, and with them, we check and compare their conclusions and the results obtained.
In [
18], a microstrip array design, with frequency of 5.4 GHz and substrate of FR4, RO4003C and ROGERS, is designed for use in a biostatic synthetic aperture radar. The types of feed networks are compared, and finally, a parallel feed of several antenna arrays is realised.
In [
19], the design and simulation of rectangular microstrip antenna arrays (1, 2 × 1 and 4 × 1) for improved gain is presented. The substrate is ROGERS with thickness = 1.6 mm and the frequency of 2.4 GHz and the simulation is realised with HFSS (High Frequency Simulation Software). The gain of the three configurations is compared and it is checked that the bigger gain is the array of 4 × 1, which is 10.29 dB.
In [
20], a fed rectangular microstrip patch antenna array (E-Shape) of 4 × 1 antennas is designed and fabricated. The resonant frequency from 1.9 GHz and the substrate ROGERS RT Duroid with thickness 1.574 mm. The gain of the three configurations is compared and it is checked that the bigger gain is the array of 4 × 1, which is 11 dB.
In [
21], the experiences in the study and development of a microstrip dipole for the 2.4 GHz band and RF-35 substrate of 1.52 mm thickness is described. The results obtained are not optimal.
In [
22], different microstrip antenna arrays of 5.8 GHz frequency and 1.5-mm thick DiClad 880 substrate are designed and simulated in HFSS, achieving a wide bandwidth and high gain.
In [
23], two-dimensional 2 × 2 and 4 × 4 microstrip antenna arrays with λ/4 trans-formers are designed at a frequency of 9.5 GHz with the 0.508-mm thick Rogers RO4350 substrate, achieving a gain of 11.38 dBi and 17.32 dBi respectively. Improving the design and radiation characteristics, reducing the cost of the array.
In [
24], a microstrip antenna is designed with a λ/4 transformer, an impedance of 75 Ω for a frequency of 700 MHz and a 1.6-mm thick FR4 substrate, achieving a directivity of 7.4 dBi.
In [
25], two microstrip antennas were designed and simulated with the HFSS and FEKO software, comparing the results with Rogers and FR4 substrate of 2 mm thickness. The square antenna was found to be more efficient at 3.5 GHz, while the circular antenna was more efficient at 6 GHz, both with FR4 substrate. The antennas achieved a directivity of 7.14 dB and 6.99 dB, respectively.
In [
26], a patch antenna array (2 × 2) is designed at 2.44 GHz for WIFI and WIMAX applications and 1.5 mm thick Rogers RT5880 substrate, achieving a directivity of 13.42 dBi with high radiation efficiency.
In [
27], a patch antenna of frequency 5.4 GHz is designed and simulated in IE3D software, and real tests are performed with a Vector Analyser. The chosen substrate was Bakelite and a thickness of 1.6 mm, reaching a gain of 5.42 dB, proving that there are differences between simulation and reality, as there are many factors that are not taken into account in the simulation.
In [
28], a patch antenna array of frequency 60 GHz is designed to achieve a directivity of 21 dBi. This parameter was achieved with 6 arrays in parallel and each with 6 arrays in series, on a 0.254-mm thick Rogers 5880 substrate.
In [
29], it is desired to design, simulate, and build an array of patch antennas at a frequency of 740 MHz, with the FR4 substrate and thickness 1.5748 mm, meeting gain (5–6 dBi) and bandwidth (690–790 MHz) characteristics being the most relevant.
In [
30], a microstrip antenna and a 2 × 2 array at a frequency of 10.5 GHz, with FR-4 substrate of 1.5 mm thickness, are designed, simulated, fabricated, and analysed. The array achieves a gain of 9.26 dBi.
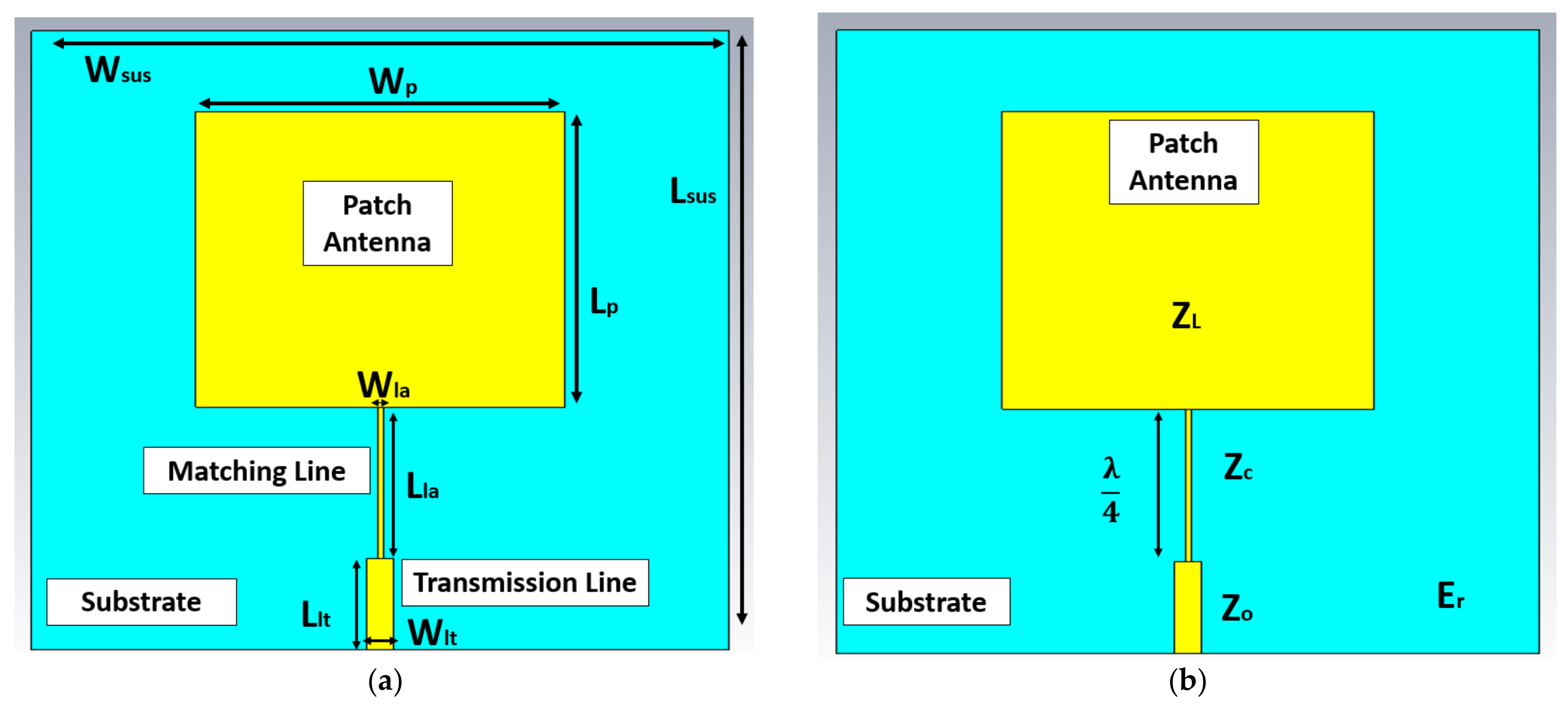
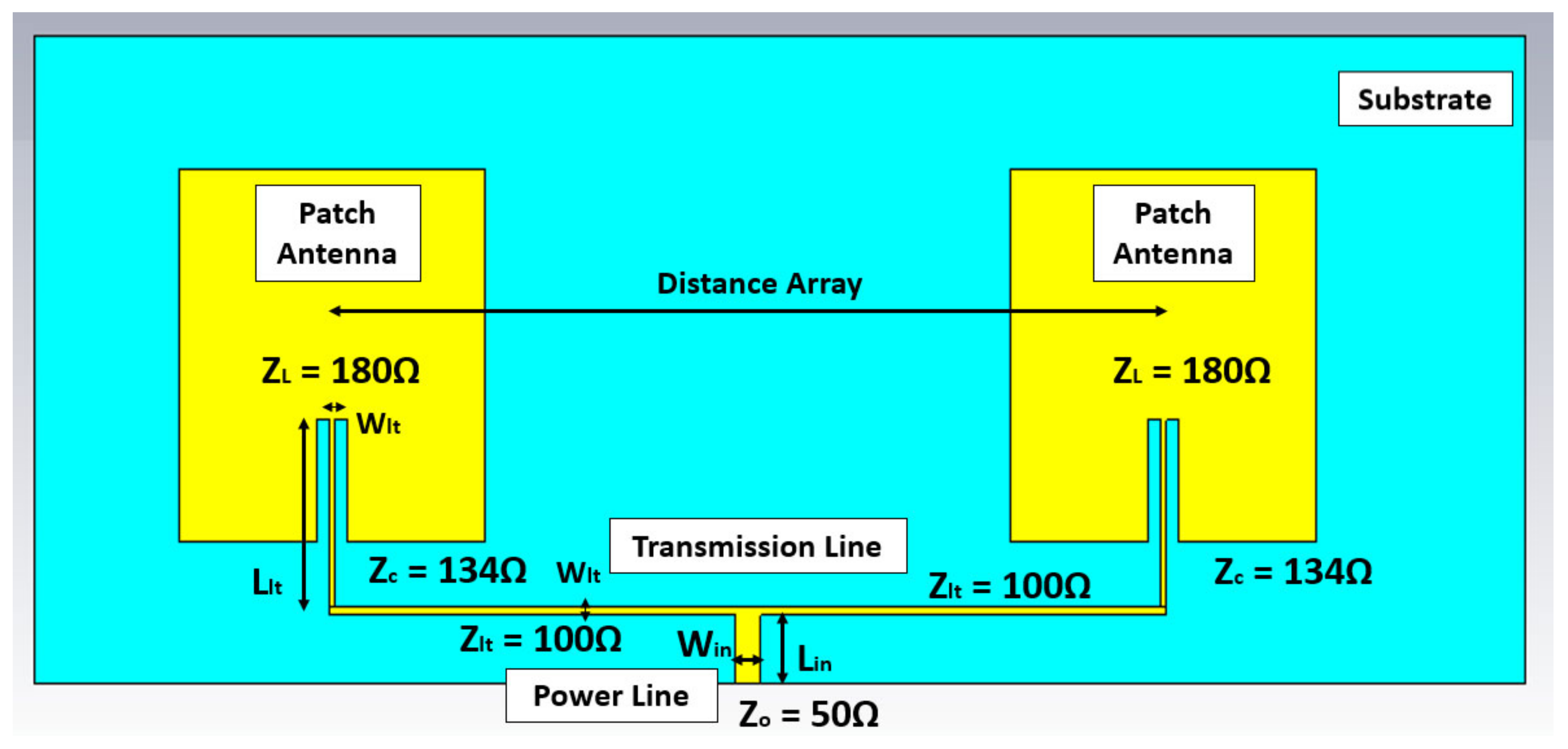
3.3.1. Coupling and Feeding with a Quarter Wavelength Transmission Line
In the case of a quarter lambda transformer coupling network, the variation in the position of the microstrip line relative to the patch will generate a higher or better impedance coupling. The microstrip antenna can be matched to a transmission line of characteristic impedance (Z
o) by a transmission line of quarter wavelength impedance (Z
c) [
38]. Microstrip feed with a quarter wavelength transmission line is shown in
Figure 6, while microstrip feed with InsetFeed is shown in
Figure 7.
To achieve impedance matching where the input impedance Z
in = Z
o, and the antenna impedance Z
L, requires that:
The Zc parameter can be altered by changing the width of the quarter-wavelength strip. The wider the matching line, the lower the characteristic impedance (Zo).
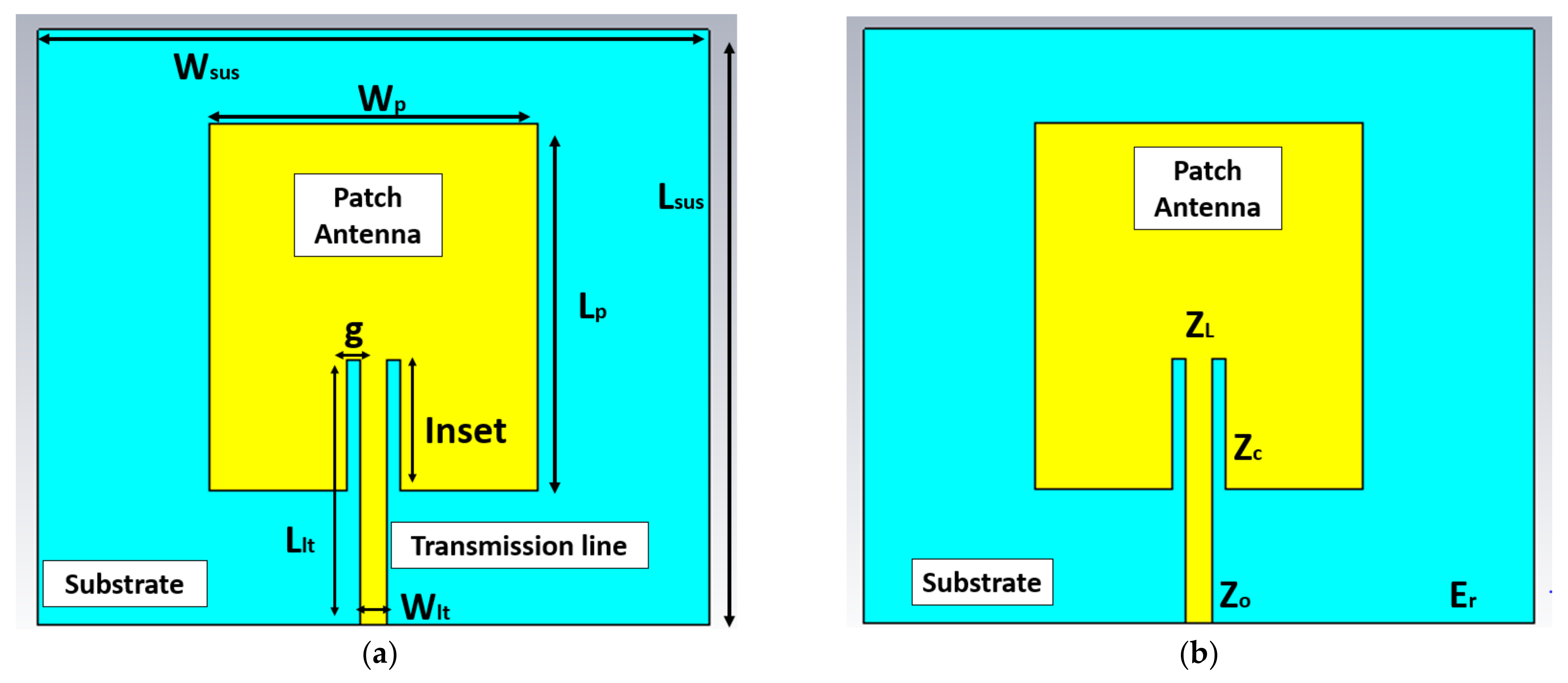
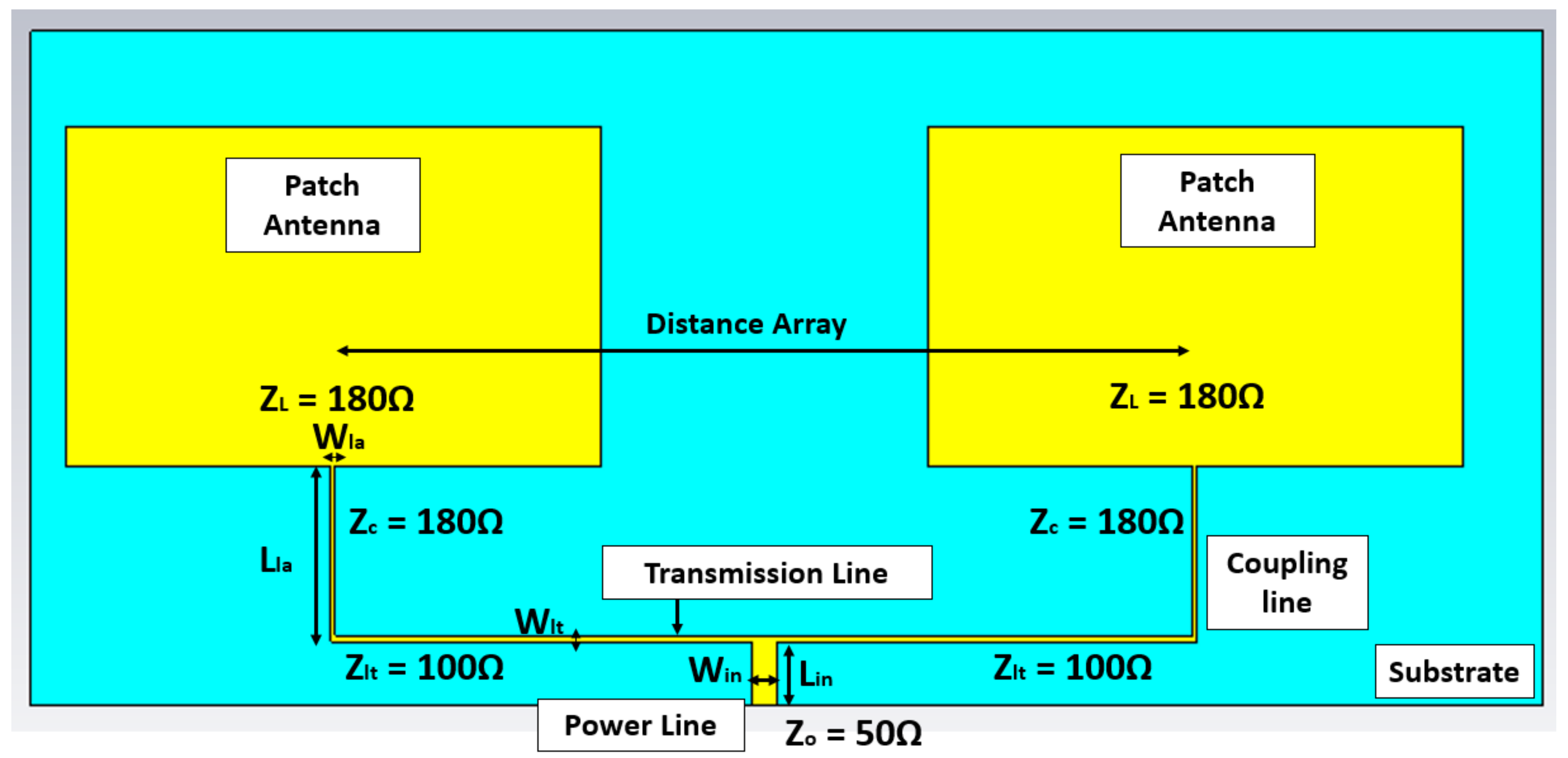
3.3.2. Coupling and Feeding with InsetFeed
In the case of insertion feeding, it is the depth of the insertion that dictates the impedance coupling. With this insertion, since the current is low at the ends of a half-wave patch and increases in magnitude towards the centre, the input impedance is reduced as the patch is fed closer to the centre [
38].
Figure 7.
Both figures are microstrip feed with InsetFeed. (a) details of the sizing parameters, and (b) impedances.
Figure 7.
Both figures are microstrip feed with InsetFeed. (a) details of the sizing parameters, and (b) impedances.
To achieve an impedance match the input impedance Z
in = Z
o, and the antenna impedance Z
L, it is required that:
By varying the distance R, a parameter that can be seen in the figure above, the voltage-current relationship will not be so high, achieving characteristic impedance values similar to those of the microstrip line. As can be seen in the image, the most representative difference between the InsetFeed adaptation and the fourth lambda transformer is a notch of length R at the input of the patch, which introduces a capacitive component modifying the resonance frequency of the patch.
In this paper, a study of both feeds and adaptations will be carried out to determine the preferable option to be introduced into the system in two different frequencies: 2.4 GHz and 5.2 GHz.
3.4. Patch Antenna Design Calculations
In this subsection, the sizing of four different rectangular patch antennas is going to be calculated depending on their frequency (2.4 GHz and 5.2 GHz), and their feeding and coupling method (fourth lambda transformer or InsetFeed), for their subsequent study in simulation.
These four antennas will be dimensioned and simulated for the same previously defined substrate, PETG, with a dielectric constant of value 3 and a loss tangent of value 0.008.
Next, the calculation of the substrate thickness, h, will be carried out, which will be determined by [
32],
The following subsection describes the transmission line model, useful for thin substrates with respect to the wavelength in free space of the signal at which the antenna in question will resonate.
A description of the design procedure for rectangular microstrip antennas is given below. The procedure assumes that the specified information includes the dielectric constant of the substrate (er = 3), the resonant frequency (that is in GHz = 2.4 GHz or 5.2 GHz), the characteristic +impedance (Zo = 50 Ω) and the thickness of the substrate. The procedure is as follows:
First of all, let us calculate the wavelength at a frequency 2.4 GHz and 5.2 GHz, respectively, with the equation,
:
Knowing the wavelengths of both frequencies, it is important to determine the thickness of the substrate (h):
Thus, h < 1.25 mm if Fr is 2.4 GHz and h < 0.577 mm if Fr is 5.2 GHz.
For an antenna with good radiation efficiency, its width (W) is determined by the following equation, which is based on radiation efficiency criteria studied by Bal and Bhartia:
where c
o is the speed of light, fr is the frequency at which we work, and e
r is the dielectric constant of the chosen substrate.
The length of the patch can be determined by the solution of the next equation:
where E
eff is the effective dielectric constant of the microstrip antenna, which is calculated by the following null equation:
And Δl is the length increment that was calculated,
Typical microstrip patch lengths are given by equation,
where λ is the wavelength in the dielectric
The next step would be to calculate the transmission line length and width.
where L
LT is the length of the transmission line and the W
LT is the width of the transmission line:
Or
where B and A are variables that can be calculated with the following equations:
The length and width of the substrate is determined:
where W
susmin and L
susmin are the minimum width and length to be assigned to the substrate, respectively.
The impedance of the antenna can be calculated as indicated in the following equation:
where R
in is the actual impedance of the antenna expressed in ohms, G
1 and G
12 are the conductance at the input resistance, and are calculated below:
The InsetFeed patch antenna, as has been seen previously, has two radiation spaces, therefore, the total admittance in slot #1 (input admittance) is obtained by transferring the admittance of slot #2 from the output terminals to the input terminals. Solving, it is obtained that the total resonant input admittance is real and is given by:
Knowing that the input impedance will then be:
where G
1 can be expressed as follows:
where:
And K
0 is the phase constant, being:
The resonant input resistance, given by the above equation, does not take into account the mutual effects between the slots. Making such a consideration, the equation number is obtained, the mutual conductance G
12 can be calculated as follows, where J
0 is the first-species zero-order Bessel function:
With this data, the distance of the insertion point, called inset in this project, can be calculated:
The next factor to determine is the separation distance between the patch and the feed line. This is determined with the equation:
For a patch antenna with a fourth lambda transformer feed, the calculation of the patch is exactly the same. However, the calculation of y
0 and g is not necessary, and the calculation of the impedance of the transmission line and the antenna is also different. R
in calculates it in the program, using the above equations. The results are shown in
Table 5.
3.5. Patch Antenna Simulation
In this subsection, the performance of the antennas calculated in the previous subsection will be designed and simulated. The program chosen is CST Studio Suite because of its speed in simulation, its low RAM consumption, and its features to achieve the design required to simulate. The steps to carry it out are detailed below:
Firstly, the workflow for the project is detailed: MW and RF and Optical, and Antennas is selected, and finally, the type of Antenna: Patch.
Then, the program makes it possible to choose the type of domain, for this project, the Tempo Domain, and the maximum and minimum simulation frequency is chosen.
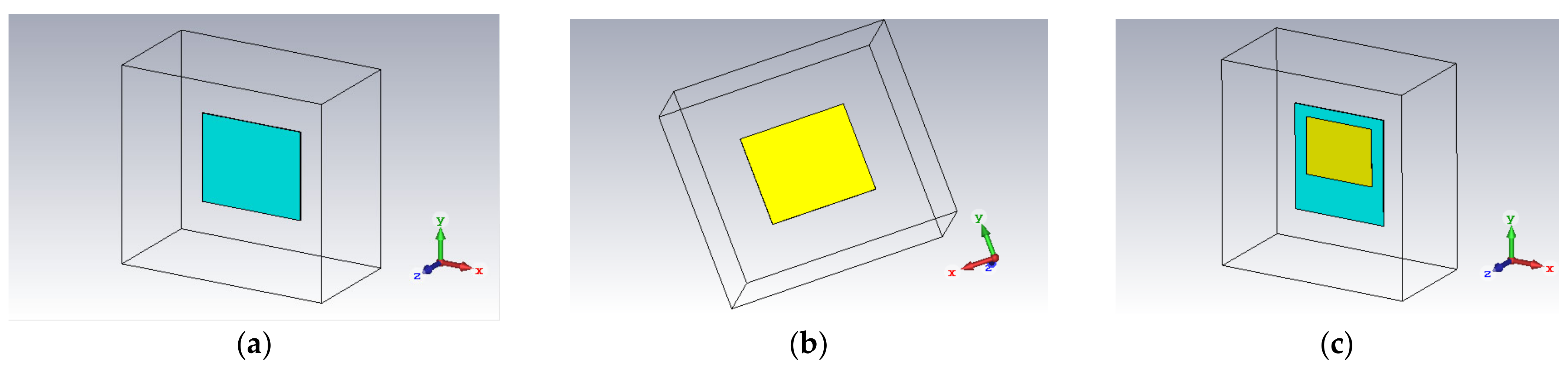
After creating the simulation environment, the antenna design is carried out. The design process is divided into three layers: the PETG substrate layer of h = 0.5 mm, the copper ground plane which is underneath the substrate, and its thickness depends on the prototyping machine used, h = 0.025 mm, and the patch antenna created above the substrate and h than the ground plane.
In the following
Figure 8 show (a) the patterning of the substrate in light blue, which represents PETG, (b) the ground plane in yellow, representing Cu, and (c) patch antenna in yellow. The width of the transmission line is calculated in
Figure 9.
The antenna layer is made, which includes the body of the patch antenna, the λ/4 transformer matching line and the 50 Ω impedance transmission line.
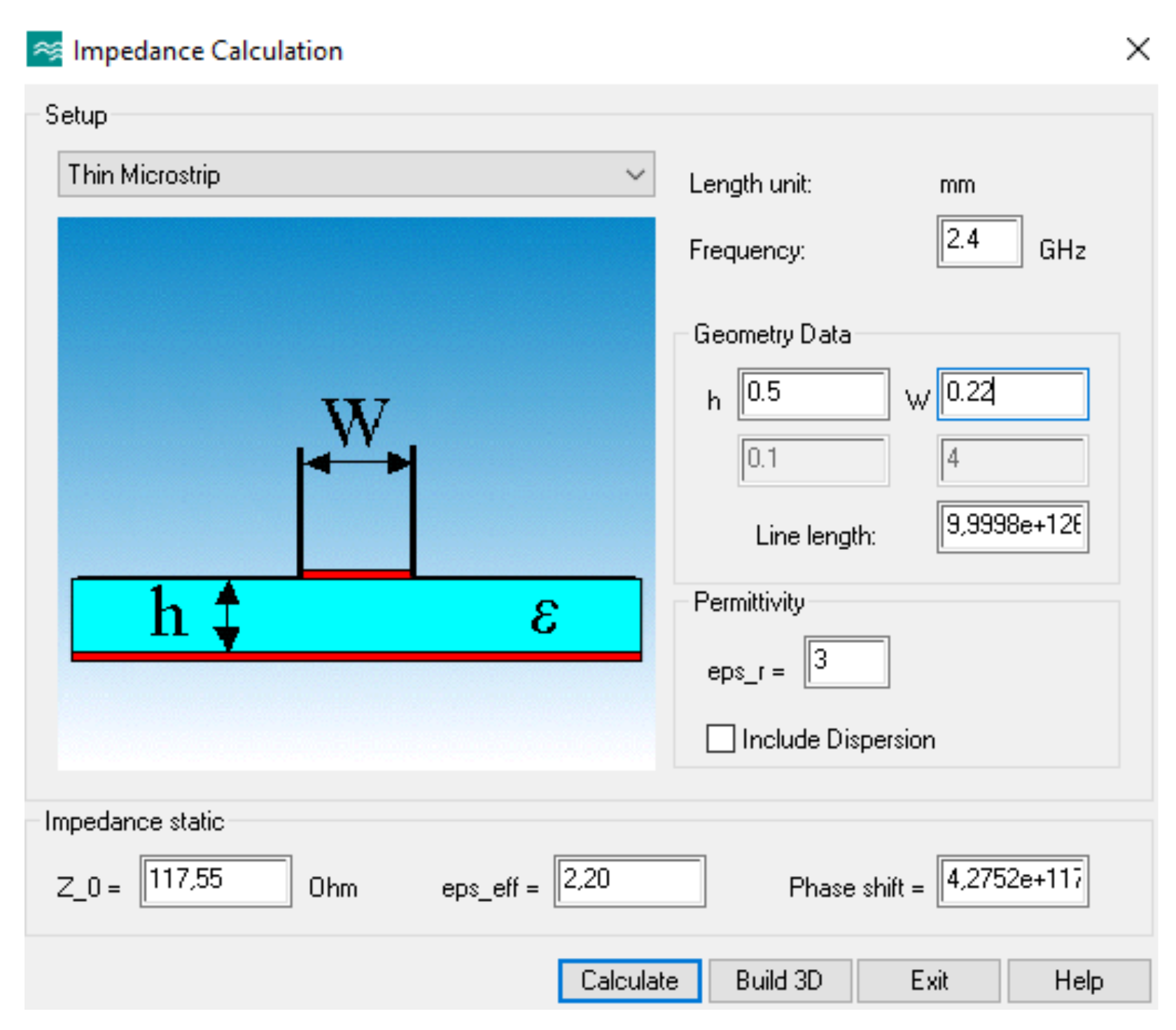
In the design calculations, the width of the transmission line was calculated with impedance Zo = 50 Ω. However, the matching line has an impedance of Zc = 117 Ω, which is essential for the width calculation. The length, as we know, is calculated as λ/4, while the width can be calculated by various applications. CST program allows us, through a MACRO, “Impedance Calculation”, to calculate the width by adding the data required for the calculation, as can be seen in the following figure.
Figure 9.
Calculation of the width of the transmission line (Wla) knowing the antenna impedance.
Figure 9.
Calculation of the width of the transmission line (Wla) knowing the antenna impedance.
The fixed value of h is added, frequency, dielectric constant and W, the latter is the one that that can be modified, and then, “Calculate” must be pressed, to calculate the impedance Z. The calculation method is trial and error, until the result is Z = 117, or as close as possible. W = 0.22 mm, Z = 117.55 Ω.
Note that the impedance matching in the InsetFeed patch is performed through the I-value, calculated in Equation (25). However, for the λ/4 transformer patch, it is calculated by performing a calculation between the input impedance and the antenna impedance. The antenna impedance depends on the values of Wp (patch width) and Lp (path length). When these are modified, consequently, the antenna impedance changes and, in turn, the impedance of the matching line, having, in turn, a new value of matching line width.
Finally, the transmission line is added, being the length of the transmission line indifferent while the width was calculated for Zo = 50 Ω, where WLT = 1.3 mm. The next figures show the steps for antenna design.
Before starting the simulation, a power supply port at the end of the transmission line must be created (see in
Figure 10). This is calculated with a MACRO called “Calculate Port Extension Coefficient” and, by indicating the position where the port will be located, it calculates and paints it directly, as shown in the following image.
Next, press the “Start Simulation” button to start calculating the different parameters needed to evaluate if the antenna is correctly designed, such as S11, VSWR, impedance matching (Z), Gain, and Directivity.
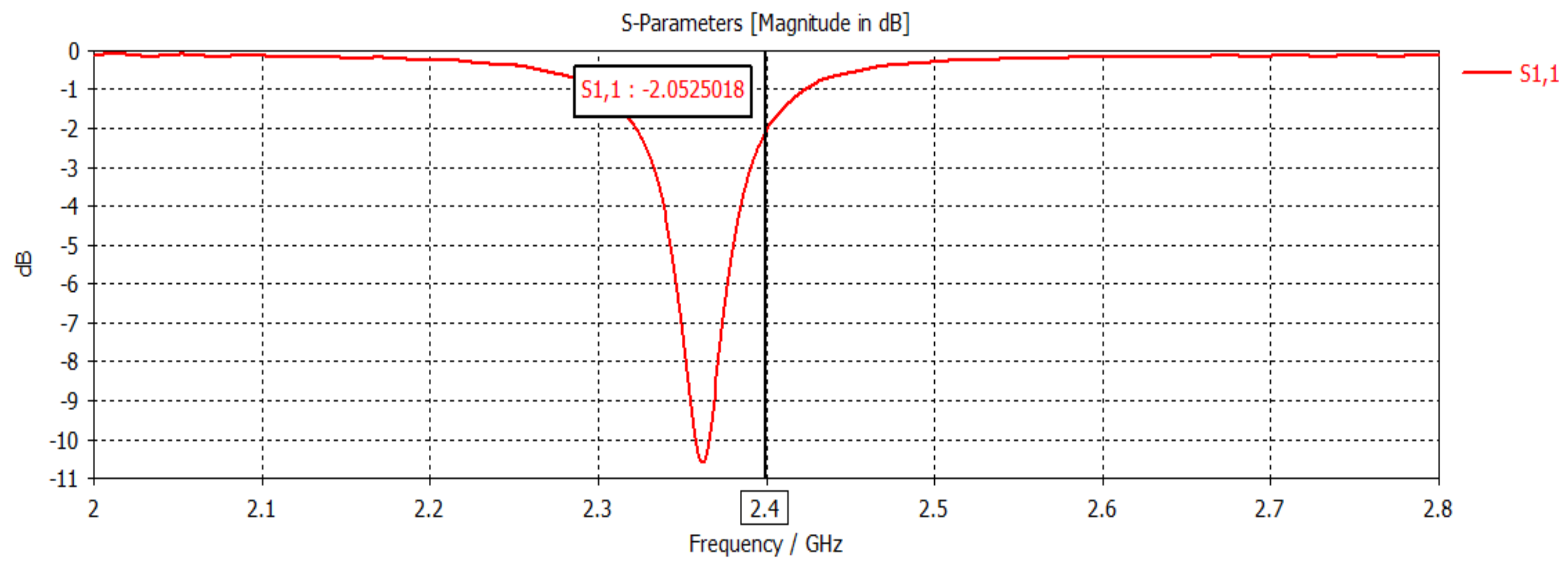
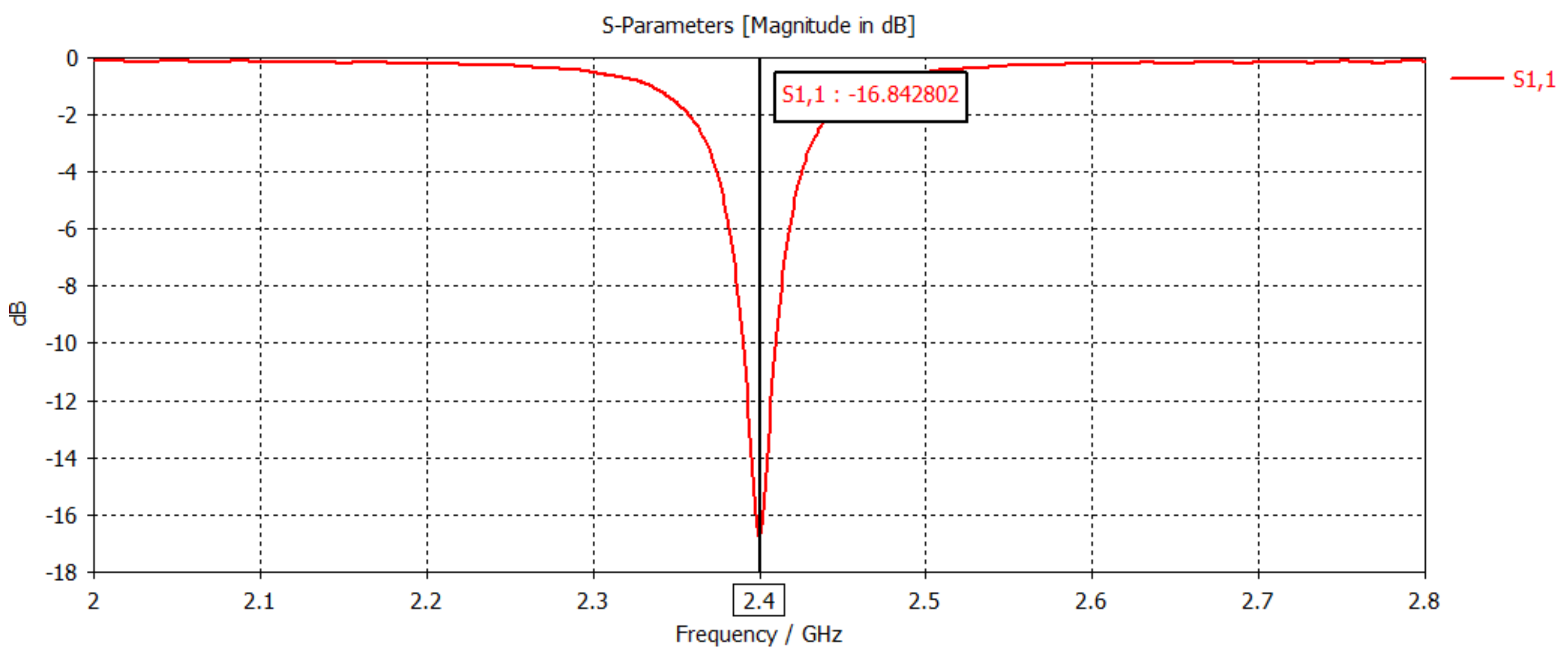
The
Figure 11 shows the value of parameter S11. In which, it can be seen how, at the 2.4 GHz value, which is the resonance frequency value, the power in decibels of the signal is almost zero (−1.688 dB), i.e., almost all the signal power sent is returned (it does not resonate). Moreover, being its highest power at the 2.36 GHz frequency, it is very low (−8.6 dB).
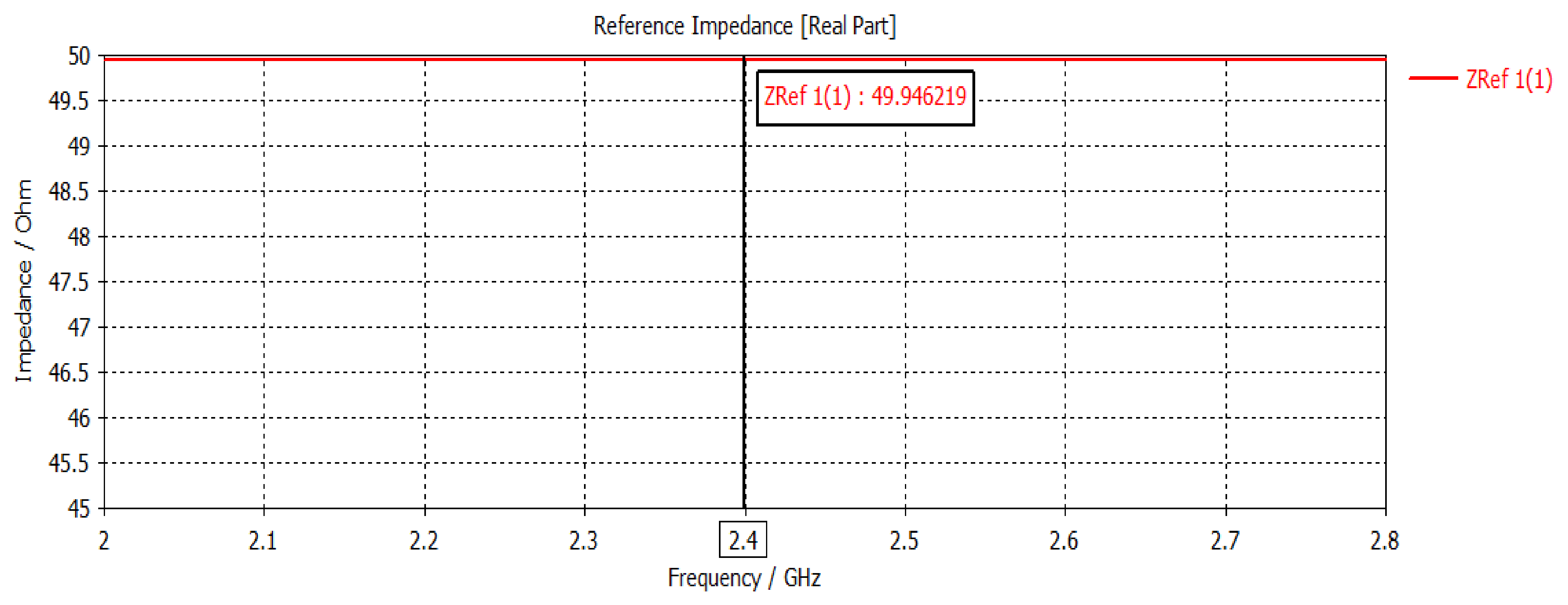
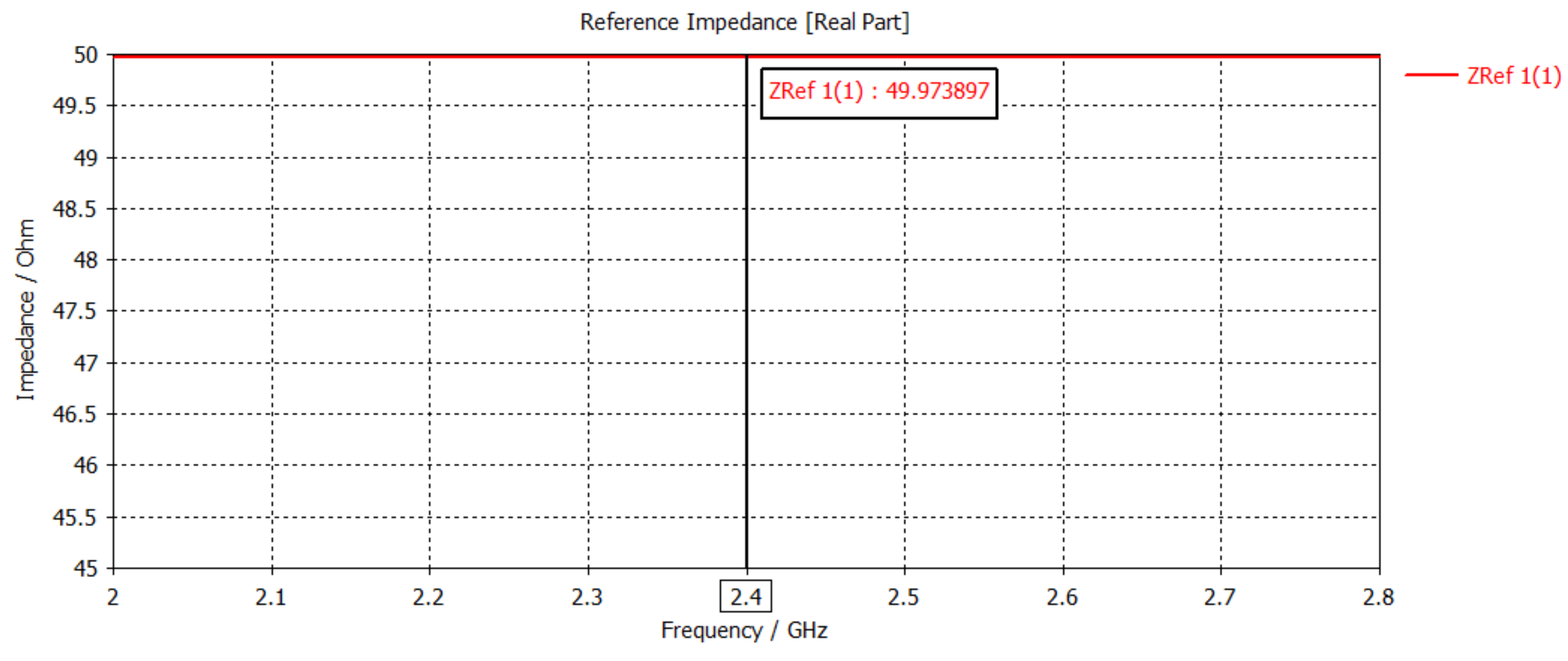
The
Figure 12 shows the matching of the reference impedance. In the project, a reference impedance of 50 Ω was determined. However, the result of the simulation gives an impedance of 47.48 Ω.
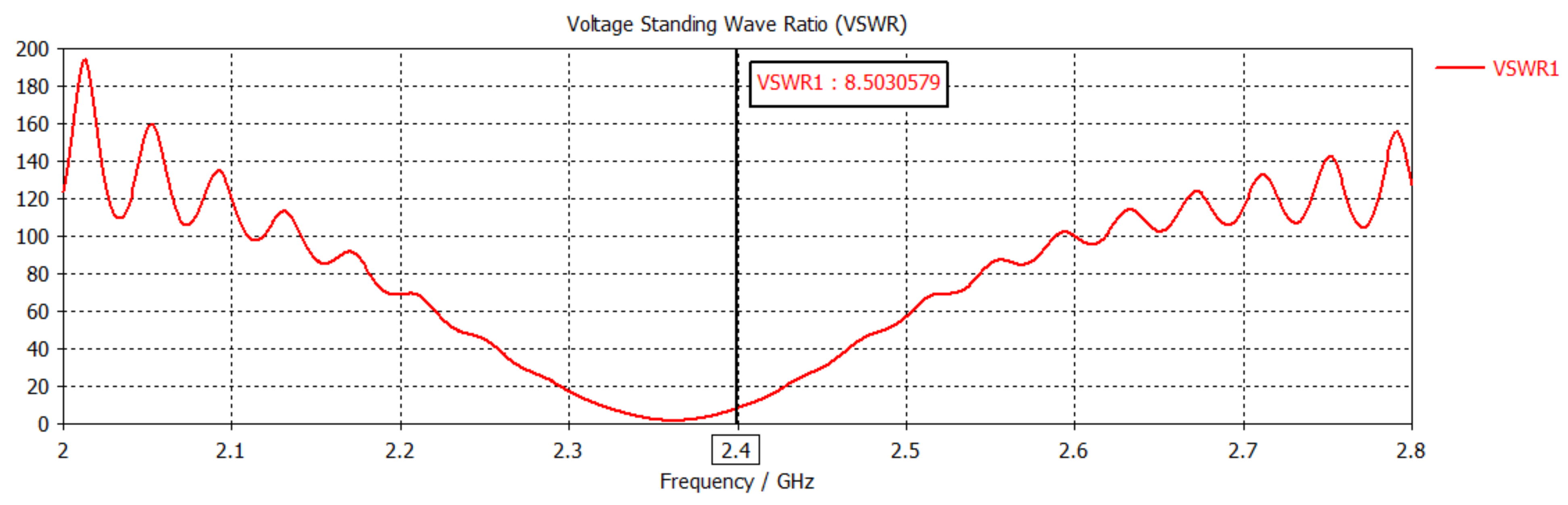
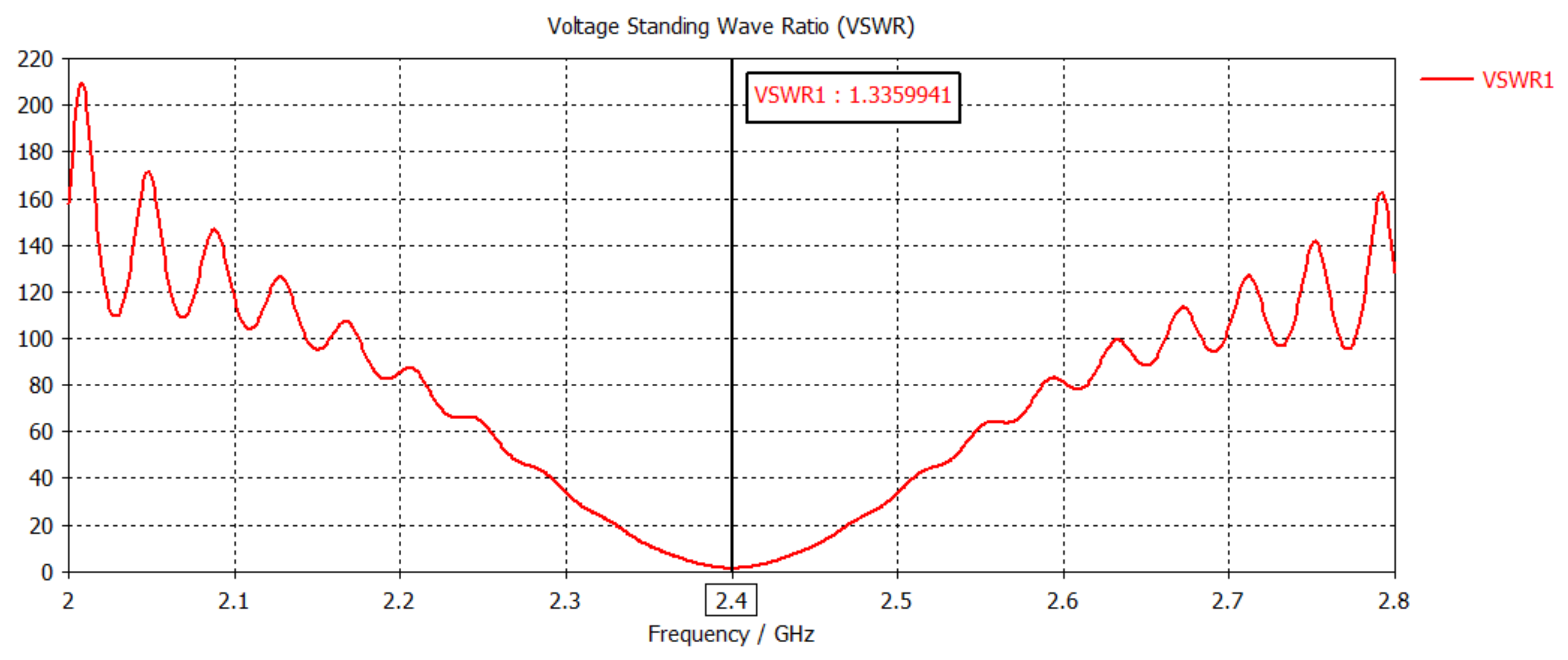
The
Figure 13 shows the standing wave voltage ratio, a measure of the efficiency with which RF energy is transmitted from the power source through the transmission line to the antenna patch, is tested. A value of less than 2 is considered adequate; however, the result was 10.32.
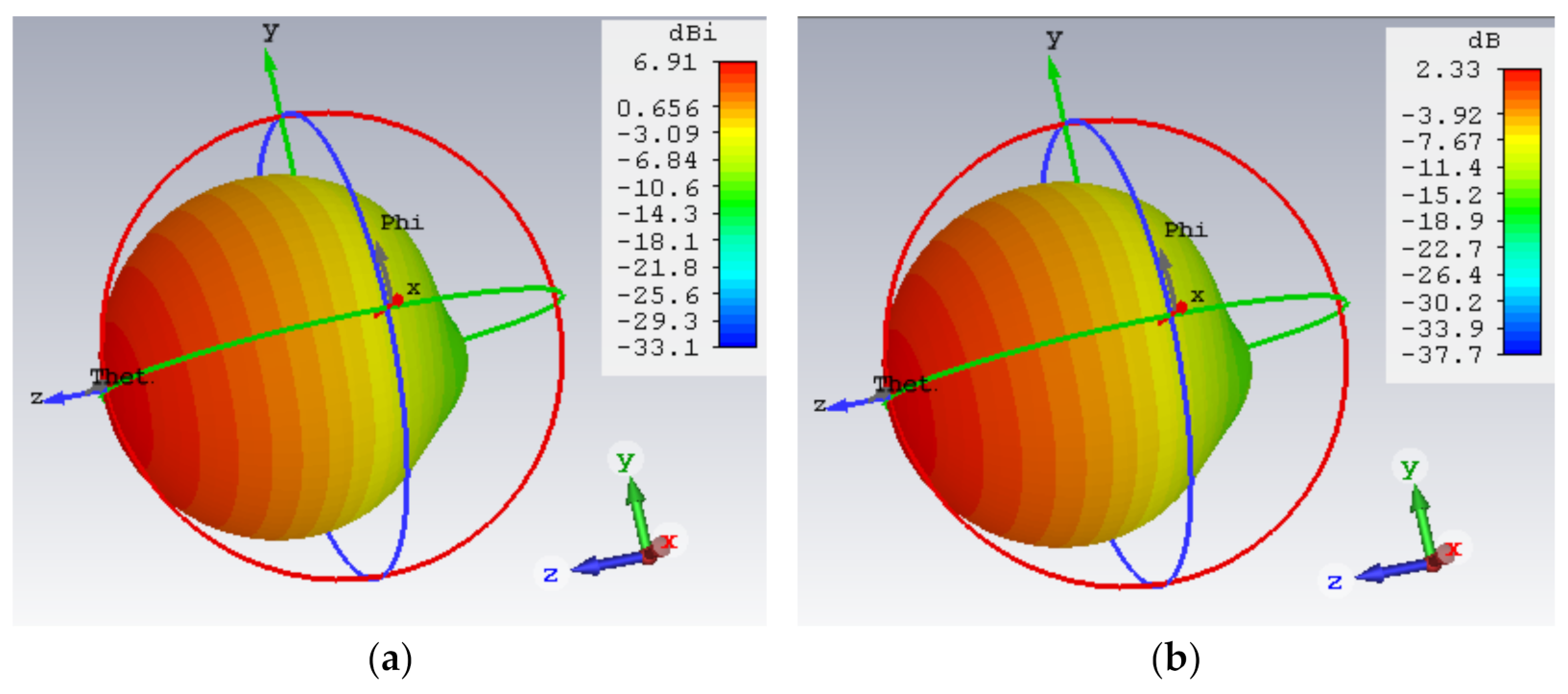
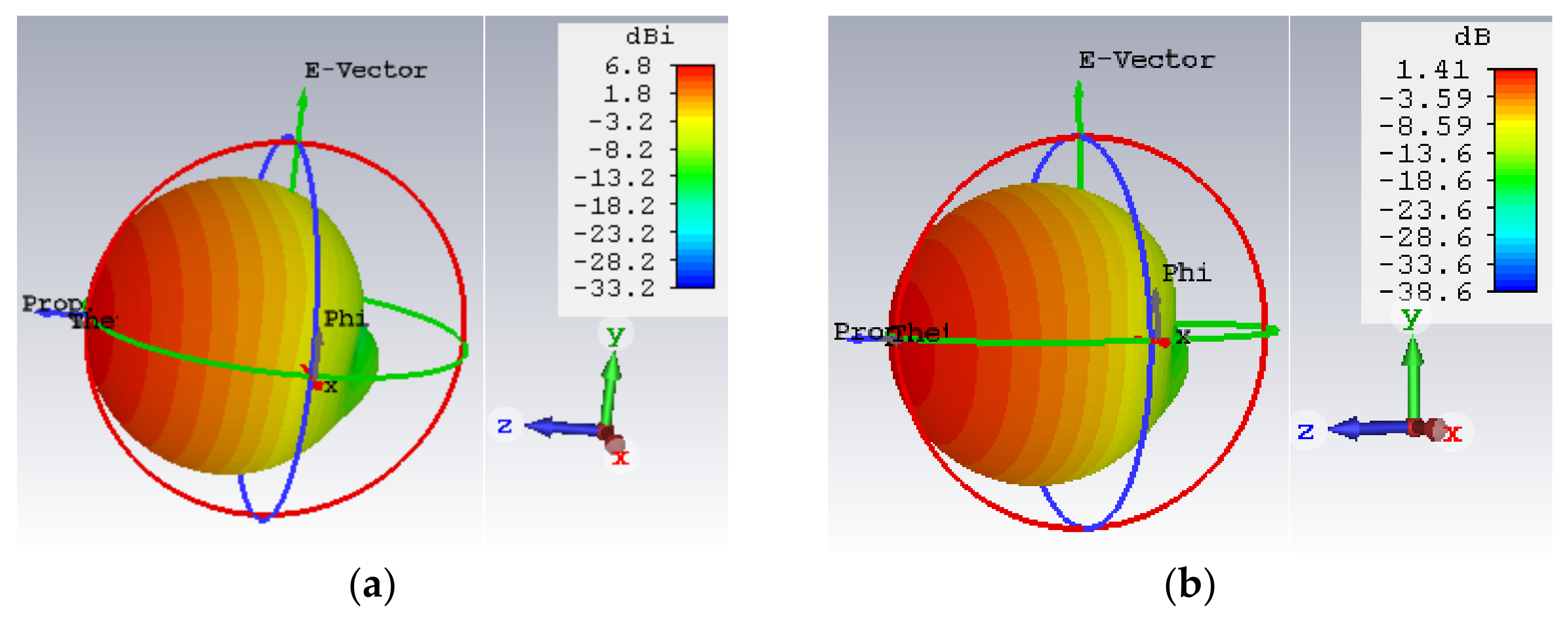
Finally, the
Figure 14 shows the directivity values on the left, 6.91 dBi, and gain on the right, 2.21 dB, are obtained. These values are optimal for an antenna of this type. However, the values of the S11 parameter, the reference impedance and VSRM are not optimal for the antenna design. The adaptation is deficient, this is due to the fact that the equations give results with so many decimal numbers accumulating errors, and in addition, the PCB printing machine of our laboratory has a minimum printing scale of 0.02 mm.
For this reason, a study is made in this paper, about how the values of the parameters calculated in the equations vary according to the parameters introduced by simulation, to get optimal results in transmission and matching. This study was carried out by the trial-and-error method, introducing higher and lower values of the antenna input parameters in the simulation and checking the variation of the output calculations.
The results of various simulations of both the λ/4 transformer antenna (the following table) and the InsetFeed antenna can be seen below. In the left column, the antenna parameters to be modified are shown and the effect of increasing or decreasing their value is checked. The first row describes the main parameters taken into account for this study, which can go up, down, or not change their value (=). In addition to these fixed values, some values vary depending (unclear) on how much the input value is increased or decreased. The results of the simulation the λ/4 antenna with different input parameters are shown in
Table 6.
The same tests were carried out for an InsetFeed antenna as with the λ/4 antenna, and the results obtained are shown in
Table 7.
In the previous tables, the parameters that have been modified are analysed. Thus, the results of the Outputs, ↑, ↓, =, Unclear, are calculated when the Inputs UP or DOWN. For instance, when the W
p, UP, the value of S11 down, but if the W
p, DOWN, the value of S11 UP. The Outputs = and UNCLEAR mean that the result does not change. In the
Table 8, the meaning of abbreviations.
This study helps to design, fix, and achieve an appropriate and effective antenna, in order to obtain profitable radio link results.
Comparing the results obtained for the values of the parameters calculated in the equations and the values of the parameters obtained in the simulated antenna, we can see in the
Figure 15,
Figure 16,
Figure 17 and
Figure 18 the difference in optimisation between them. The results of the first simulated antenna showed almost no matching, but higher directivity and gain, while in the case of the second simulated antenna, which was tested with many simulations, a little bit lower directivity and gain but a high matching were shown, which is what we were trying to achieve.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}