1. Introduction
The development of world trade has promoted the prosperity of the maritime transportation industry [
1]. Therefore, improving maritime safety and ship transport efficiency has been a global focus. Trajectory prediction is important for improving marine traffic safety and transportation efficiency [
2,
3]. Because prediction technology can predict the behavior of ships in advance, it can realize functions such as the early warning of maritime risks and the planning of safe routes [
4]. However, the complexity of the maritime transport environment leaves room for improvement in forecasting technology. For example, there are many ships in ports and densely populated routes; in addition, limited monitoring methods in distant oceans lead to late warnings. Therefore, researchers have become eager to explore more accurate and efficient methods of predicting the trajectory of ships [
5,
6,
7].
The Automatic Identification System (AIS) is utilized for condition monitoring and the condition data management of seagoing vessels [
8,
9]. It is characterized by its wide coverage and large data volume. AIS data record important information, such as a ship’s position, course, and speed during navigation, which is extremely valuable for studying advanced models in terms of predicting ship trajectories [
10]. In particular, satellite-based AIS systems can overcome the limitations of limited distances from land-based base stations and can monitor the status of oceangoing vessels [
11]. Therefore, AIS data are frequently utilized to study advanced models for forecasting the trajectory of ships [
12].
Existing methods for predicting vessel trajectory fall into three categories: traditional [
13,
14], machine learning [
15,
16], and deep learning [
17,
18,
19]. Traditional approaches primarily rely on empirical and mathematical models following specific physical laws [
20,
21]. However, the application scenarios of traditional methods depend on boundary conditions. Machine learning methods can improve prediction accuracy by creating complex mathematical models to simulate ship movements [
22,
23]. However, machine learning approaches need to collect a considerable amount of labeled data and the establishment of appropriate rules. Deep learning methods can extract features from large-scale historical ship trajectory data via neural networks and are good at processing nonlinear and high-dimensional data [
24,
25,
26]. However, the complexity of maritime application scenarios and the changing traffic environment leave considerable room for improvement in existing methods.
Notably, during sea travel, ships are affected by various environmental factors such as sea wind, visibility, temperature, etc. These environmental factors influence the speed, direction, and navigation path of the ship. Therefore, relying solely on AIS data is insufficient to achieve highly reliable forecasting methodology. The Maritime Traffic Services System contains AIS data, which are used to monitor ship statuses and maritime environmental data. Therefore, how to build a reliable model for forecasting a ship’s trajectory in a multimodal data environment, such as AIS and environmental data, still needs to be studied.
In this study, we aim to design an adaptive multimodal data vessel trajectory prediction model (termed AMD) based on satellite AIS and environmental data. This model considers the spatio-temporal information and environmental factors that affect ship navigation at sea. The AMD model can make reliable predictions under multimodal data to ensure the safe navigation of vessels at sea. First, a hybrid correlation of AIS and environmental data is performed based on the closest period and shortest distance. Then, a multilayer perceptron (MLP) and gated recurrent unit (GRU) networks are applied to the AIS- and environmental-based extraction networks, respectively, and modal prediction information is integrated to obtain the final prediction result. Finally, a comparison with current existing research validates the effectiveness of the AMD model. Typical tests and ablation experiments also show the effectiveness of the AMD model.
2. Related Works
In intelligent maritime transportation, numerous research efforts have been made to improve prediction performance. These methods can automatically extract features from vast amounts of data and achieve teh high-precision prediction of ship trajectories through complex pattern recognition [
27]. More details about these three mentioned approaches are given in the following sections.
2.1. Traditional Methods
Traditional methods typically rely on empirical and mathematical models. These methods forecast ship trajectories through simulation or statistical analysis. Traditional methods mainly include simulation, statistical, knowledge-based, and control theory-based methods. For example, Xu et al. [
20] designed a high-precision, long-period oil tanker trajectory prediction algorithm, which applies the density-based spatial clustering of applications with noise (DBSCAN) clustering to process AIS data, as well as extracts a series of key points representing critical navigation modes. They then developed, in turn, a novel path search algorithm to select one part of these key points to generate a predicted trajectory to a fixed target. Zhang et al. [
21] presented a big data analysis strategy for proactively reducing baseline risk. The technique groups environmental parameters utilizing k-means and DBSCAN big data clustering methods, as well as principal component analysis, and it then predicts chosen ship movement dynamics employing multi-output Gaussian process regression. Xiao et al. [
28] introduced a novel model that integrates motion modeling and filtering processes. Srivastava et al. [
14] presented a lightweight, short-term forecast model based on linear stationary models for ship trajectory prediction and real-time anomaly detection. They integrated the best-fitting auto-regressive integrated moving average (ARIMA) model with window generator models of different sizes and visualizations for recursive real-time predictions. However, these methods often have data quality and model complexity limitations, thus making it difficult to make highly accurate predictions. For example, simulation methods may have difficulty dealing with significant time interval uncertainties. Statistical methods are based on similarity searches and Bayesian inference. Knowledge-based methods require the extraction, storage, and retrieval of knowledge. These limitations point to the need for more advanced prediction techniques.
2.2. Machine Learning Methods
A growing number of studies are focusing on using machine learning methods to ship trajectories. Zhang et al. [
29] designed a position prediction approach to increase ship position forecast accuracy in ship traffic engineering by employing the k-nearest neighbors (KNN) algorithm. Sedagha et al. [
22] presented a system framework for online maritime traffic monitoring aimed at the real-time tracking of vessels on waterways and the prediction of their subsequent positions. Through employing a decomposition reconstruction process and adaptive segmented error correction, Wei et al. [
30] developed a multi-objective heterogeneous integration approach for predicting ship motion. Xiao et al. [
31] designed a machine learning model employing physical information to build a gray box model (GBM) to predict the speed of ships crossing the ocean. Dong et al. [
23] introduced a new mathematical data integration prediction (MDIP) model for predicting the maneuvering movement of ships. The MDIP model, proposed using mathematical data integration, exhibits greater generalization ability and opens up new ways for predicting the maneuvering movement of ships. However, machine learning methods require extensive data labeling and exhibit a weak learning ability for the dynamic characteristics of ships. Therefore, the training and prediction of machine learning models still face numerous challenges.
2.3. Deep Learning Methods
Deep learning methods are reasonable at utilizing neural networks to extract high-dimensional features from large amounts of data and have been widely employed. Wu et al. [
32] designed a combined convolutional long short-term memory (LSTM) and sequence-to-sequence (Seq2Seq) model for improved accuracy. Chen et al. [
24] designed a new framework to obtain and predict ship trajectories more accurately using the bidirectional LSTM (BiLSTM) model. Zhao et al. [
26] designed a model for predicting ship trajectories using a graph attention network (GAT) and the LSTM model. Guo et al. [
33] proposed a multimodal-data-based approach for predicting ship trajectories by incorporating additional hidden states to define complex modes independently. A context-driven, data-driven framework for predicting ship trajectories was presented by Mehri et al. [
34]. This framework first enriched the contextual information of a trajectory, including the evaluation methods for annotating a trajectory, and then applied feature selection techniques to solve high-dimensional problems. Finally, selected factors were used in the context-aware LSTM network. However, current deep learning methods still face numerous challenges. For example, they have difficulty effectively fitting complex environmental changes and uncertainty factors. In this study, we investigate how to develop efficient methods for predicting ship trajectories under complex environmental factors.
3. Preliminaries
3.1. Problem Definition
A multimodal dataset containing AIS and environmental data can be defined as time-ordered tuple sequences containing N samples. The sequence contains a list of time points , a discrete space–time sequence , and a discrete environment sequence .
The problem of neural network-based trajectory prediction is the difficulty in learning spatio-temporal mapping from a multimodal dataset that can predict future motion locations based on previously observed features. We adopted a sliding window to rearrange S into a new data representation. The input sequence is represented as a sequence with input length g, the output sequence is defined as a sequence with output length l, and d represents the data dimension.
3.2. Multilayer Perceptron Network
The MLP network comprises input, hidden, and output layers [
35,
36]. We define the observation sequence
in the AIS dataset to represent a trajectory spatio-temporal sequence of length
g. The internal hidden state is updated as the elements in the input sequence are read sequentially:
An activation function with -learnable parameters is represented by . In the j-th hidden layer, represents bias, while represents weight. Finally, the output layer receives the hidden layer state as an input to make sequential predictions.
3.3. GRU Network
Figure 1a shows that the GRU network is less complex than LSTM. This difference is because the GRU network uses fewer gates and does not have a separate internal memory. The GRU relies entirely on hidden states as its memory, thus resulting in a simpler architecture. Therefore—compared to LSTM (as shown in
Figure 1b), which has a greater number of gates and states—the GRU has fewer parameters and may have less computational complexity. The GRU algorithm allows for faster convergence and internal weight updates [
37]. The gating vector can determine whether the information in the long-term sequence is not cleared or removed over time.
We define the observation sequence
in the environmental dataset to represent an ecological mode sequence of length
g. The GRU algorithm reads the elements in the sequence one by one and updates the internal hidden state. Specifically, the refresh rate at time
t is calculated using the following formula:
where the input vector at time step
t, denoted as
, is the
t-th element of the environmental modal input sequence
, which experiences a linear transformation. In addition,
saves the previous time step
1, and
and
are weight matrices.
Update gates determine the amount of past information that is needed to propagate into the future. The following expression calculates the reset gate:
The reset gate stores past relevant information through the following formula:
The input
and the previous statement
change linearly through the weight matrices
and
; then, the corresponding element product
and hadamard product
are calculated. In addition,
is calculated using the following formula:
where
and
denote the information retained between time steps.
4. Adaptive Multimodal Data Method
4.1. Overview Architecture
To address the trajectory prediction problem described in the previous section, we propose a new AMD model. Our model is designed to map AIS and environmental multimodal data input sequences to the output sequences of specified lengths. In a given time step
s, our model aims to learn the following prediction distribution:
which represents the
probability that
g multimodal observation data in a given input sequence
map to the
l target trajectory sequences in the future. The neural network model can directly sample the target sequence once the predictive distribution has been learned.
The task of the proposed AMD model is essentially a regression problem. The purpose is to train the adaptive multimodal data neural network-based model
using AIS
and environmental
data. An output sequence
of length
l is generated, thereby maximizing the conditional probability Equation (
6), that is
where the parameterized function
can be trained from a given multimodal dataset to find the parameter set
in the training samples nearest to the mapping function in Equation (
7), thereby minimizing the following task-relevant error measure
L:
where
N represents the overall sample count, and
and
denote the input and target sequences.
Figure 2 shows that the AMD model mainly contains an AIS-based extraction network, a weather-based extraction network, and a fusion block. First, the observation sequence
is read based on the AIS extraction network, and the temporary prediction value
is obtained through neural network training. Then, the environment observation sequence
is read based on the environment extraction network, and the temporary prediction value
is obtained through neural network learning. The FC is the fully connected layer, which is used to transform the matrix learned via the modal data feature extraction network according to the target sequence dimension. Finally, the fusion block fuses the predicted values
and
to generate the
of the final future trajectory.
We learn the mapping relationship
in Equation (
9) through AIS- and environmental-based extraction networks. The initial calculation functions are given in the following formulas:
A neural network with parameters
and
can be described using Equations (
9) and (
10). A mapping
is defined between the input sequence
and internal expressions
, such that
is the output of the MLP’s hidden state.
maps the input sequence
to the internal expression sequence
, such that
is the fully connected layer output of the hidden state connection GRU.
Finally, through the fusion block pairs
and
, the mapping relationship
in Equation (
7) is fused and learned, and the following output sequence of length
l is finally generated:
where Equation (
11) is a neural network with
as a parameter, which maps the input intermediate prediction value to a series of internal representations
, such that
is the output after fusion and addition.
In our study, the AIS-based extraction and prediction network utilizes the MLP network, and the environmental-based extraction and prediction network employs the GRU network. The following subsections will provide more details about AIS- and environmental-based extraction networks, as well as fusion blocks.
4.2. AIS-Based Extraction Network
The observation sequence in the AIS data is captured via the neural network input layer based on the AIS extraction network. Afterward, the hidden layer learns the weights and parameters, and the fully connected layer outputs predictions. We employ Equation (
9) to map
to the output, that is, the hidden sequence
, and this is iterated through the following neural network function:
In Equation (
9),
is a sequence of length
l obtained via the hidden layer output vector
after another connection operation. The AIS-based extraction network encodes the spatio-temporal information from each element
.
4.3. Environmental-Based Extraction Network
The GRU neural network uses a environmental-based extraction network to capture the observation sequence in the environmental data. Afterward, the hidden layer learns the weights and parameters, and the fully connected layer outputs the predictions. We employ the GRU network in Equation (
10) to map the
to the output, that is, the hidden sequence
, and this is iterated through the following neural network function:
In Equation (
10),
is a sequence of length
l obtained after performing another connection operation on the hidden layer output vector
. Each element
encodes the environmental modal information input from the
t-th component of the sequence to the environmental-based extraction network.
4.4. Fusion Block
The fusion block of Equation (
11) aims to generate future trajectories given the temporarily predicted values
and
. Mathematically, the fusion prediction block decomposes the fusion probability into ordered conditions to calculate the conditional probability given the temporary prediction value. Given the prediction sequences based on AIS and environment extraction networks, observations and future sequences are assumed to be conditionally independent as follows:
where the future trajectory
is calculated via
F given the temporary prediction values
and
, the observation sequence for time step
j, and
in the fusion prediction block.
4.5. Data Preprocessing
We elaborated on the data preprocessing process with regard to the association between AIS and the environmental data, as well as with respect to the processing of training data.
4.5.1. Correlating AIS and Environmental Data
This study adopted real-world AIS and environmental data. Each row in the AIS dataset records the ship’s spatio-temporal message, including the timestamp (), the maritime mobile service identity (), longitude (), latitude (), course over ground (), and speed over ground (). Each row in the environmental dataset records local weather data, including timestamp (), longitude (), latitude (), wind (), visibility (), and temperature (). The original AIS data do not contain environmental factors and need to be effectively correlated. Therefore, we utilized the closest and shortest distance methods to correlate the AIS and environmental information.
Firstly, for each AIS data point, the closest environmental message cluster was selected from the environmental dataset based on the timestamp field.
Secondly, the environmental data nearest to the AIS data were selected from the filtered environmental message clusters.
Finally, the filtered environmental data were combined with the AIS data to form new multimodal original data containing both AIS and environmental data.
The above steps were repeated to form a new multimodal AIS and environmental dataset.
4.5.2. Dataset Normalization
To ensure the quality of data utilization, we preprocessed the correlated multimodal dataset. Normalization can eliminate the differences in data across different dimensions in the original dataset while preserving data characteristics as much as possible. The min–max normalization method was applied to normalize the multimodal datasets, as shown in the following formula:
where
X denotes the original data,
denotes the maximum value, and
and
are the minimum and normalized data, respectively.
To avoid distorting the obtained model due to any changes in the regional extent, when normalizing the longitudinal and latitudinal values, we set the longitudinal = 180 and = −180, as well as the latitudinal = 90 and = 0. We did not utilize the maximum and minimum longitudinal and latitudinal values within the data of a given area.
Meanwhile, to obtain multiple continuous space–time sub-trajectory sequence data for each ship, a window sliding method based on timestamps was applied to segment the normalized dataset. The length of the observed sequence for each sub-trajectory is g, and the size of the predicted sequence trajectories is l. The proposed AMD model can set a reasonable data input and output length according to the task requirements.
4.6. Implementation Details
This subsection mainly introduces the detailed configuration of the AMD model. Our model was implemented on the Python 3.6 platform, and all experiments were performed on a PC equipped with an Intel Xeon(R) E5-2650L v3 @ 1.80 GHz CPU with 32 GB of RAM. Multivariate input sequences were first transferred into 64 units for analysis using MLP and GRU networks, and this was followed by a step-by-step learning of the output sequences. Using Adam’s algorithm, the batch size was 64 and the number of epochs was 300. The detailed configuration is shown in
Table 1. In addition, before training the network, the dataset was split into 70% training and 30% testing sets.
5. Results and Analysis
5.1. Datasets and Evaluation Metrics
This study mainly used AIS and environmental datasets from the geographical area of the Australian and Argentinian oceans. The AIS dataset was obtained from the China Maritime Safety Administration, and the environmental dataset was obtained from the National Centers for Environmental Information Data. Specifically, we selected the data from 1 April to 30 April 2020 to verify this research method. As shown in
Figure 3, we chose the marine around Australia and southern Argentina. The detailed latitudinal and longitudinal range of the selected sea areas is shown in
Table 2. We verified the effectiveness of the AMD model using the two datasets. After the AMD model was trained on one of the sea areas, it was not directly transferred to the other sea area for direct use. Data preprocessing was performed for AIS and environmental data using the preprocessing method. The results before and after processing are shown in
Table 3.
The AIS dataset of the Australian oceans has three characteristics: (1) in some areas, navigation is intensive, and there are scenarios with high maritime traffic complexity; (2) there are intensive ship activities at sea, and the tracks in the Australian marine area are dense, as shown in
Figure 3; and (3) many types of ships exist, as described in the following
Section 5.3.2, and the dataset includes eight types of ships, with each ship’s primary business at sea being different. Given these marine areas with dense routes, various ship types, and high complexity, there is an urgent need to improve maritime traffic safety and rationally plan routes for maritime ship navigation to avoid ship collisions.
This study mainly used
,
, and
metrics to evaluate the usefulness of the AMD model. An error between the observed and predicted value was calculated to measure the quality of the vessel trajectory prediction task. Specifically, the aforementioned metric formulas were computed as follows:
where
and
are the observed values, and
and
are the predicted values.
N denotes the total samples. A smaller error value means a better prediction.
Furthermore, we computed the distance between the predicted and observed values employing the haversine formula. The half-positive vector distance of any two trajectory points, such as
and
, is calculated as follows:
where
R denotes the Earth’s radius. Using nautical miles (
) as the distance measurement unit, we define the mean square error
for
N sample points to evaluate the AMD model performance better:
A predicted trajectory value is denoted by , while a measured (ground truth) trajectory value is denoted by .
5.2. Quantitative Analysis
For a detailed comparison, we compared the AMD model against the current work on vessel trajectory prediction. We used the LSTM [
38], GRU [
39], ANN [
40], BLSTM [
41], EncDec [
42], MPLSTM [
43], and ST-Seq2seq [
44] models as the baseline models. In particular, LSTM and GRU are variant models of RNN networks, and several other models are effective trajectory prediction methods that were built using neural networks. Each model sets its learning rate for training according to the baseline model. The detailed configuration is shown in
Table 4. The models were trained on the training set to obtain trainable models, and these were then evaluated on the test set.
Our experimental results were based on the Australian and Argentina datasets.
Table 5 shows that the AMD model was the most effective on various evaluation indicators. Specifically, in terms of
and
metrics, the results of various models in the Australian dataset showed that our model exhibited improvements of at least 55.4% and 57.09%, respectively. These results proved that using AMD modal information with various neural networks to adapt to multimodal AIS and environmental data has obvious advantages in improving vessel trajectory prediction capabilities.
Moreover, when contrasted against the seven comparison models, the AMD model improved, on average, by 75.44% in terms of the evaluation metric on the Australian dataset. Compared to the benchmark models, the of the AMD model improved by 45.49% on the Argentina dataset. It is worth noting that the prediction results of the ST-Seq2seq baseline model deviated from other models by more than 100 times. This showed that the ST-Seq2seq model does not perform well on our ocean dataset, which is closely related to the ST-Seq2seq model design goals and dataset.
measures the error between a model’s predicted and actual values. As shown in
Table 5, the AMD model improved by an average of 84.39% and 74.66% compared to the baseline comparison model on the Australian and Argentina datasets, respectively. We selected the ship’s trajectory data (
= 636,092,810) on the Australian dataset and the ship’s (
= 740,349,000) on the Argentina dataset to draw a schematic trajectory diagram. We set the length of the observation sequence and the target prediction sequence to 9.
To explicitly show the effectiveness of the AMD model, we selected a period of historical trajectory data in the dataset as the test data to draw a trajectory display chart. We defined the known trajectory in the input prediction model as the ‘observation’ trajectories and the actual trajectory of the target predicted trajectory segment as the ‘truth’ trajectories. Among them, the ‘observation’ trajectories are also the same starting point sequence of the different prediction models. As shown in
Figure 4, across different datasets, AMD’s prediction was closest to the true trajectory. However, the predicted trajectories of the other models significantly deviated by several nautical miles. This trajectory diagram is consistent with the experimental results. In summary, our AMD model achieved satisfactory performance in vessel trajectory prediction.
5.3. Qualitative Analysis
5.3.1. Comparison with Sub-Extraction Models
As mentioned earlier, the AMD model was based on MLP and GRU networks. To verify the efficacy of the AMD model, we compared it to those from the sub-extraction models constructed from MLP and GRU. AIS and environmental datasets were directly associated with training the sub-model. That is, the input dimension and input step were 10 and 2, respectively.
The AMD model exhibited better prediction across various evaluation indicators when compared to the sub-model, as shown in
Table 6. Through comparing the predicted value and the actual value evaluation index
,
Figure 5 shows that our proposed model performed best on the two datasets used for evaluation. This experimental result proved that simply utilizing a single neural network to train mixed AIS and environmental data cannot achieve prediction results with good accuracy.
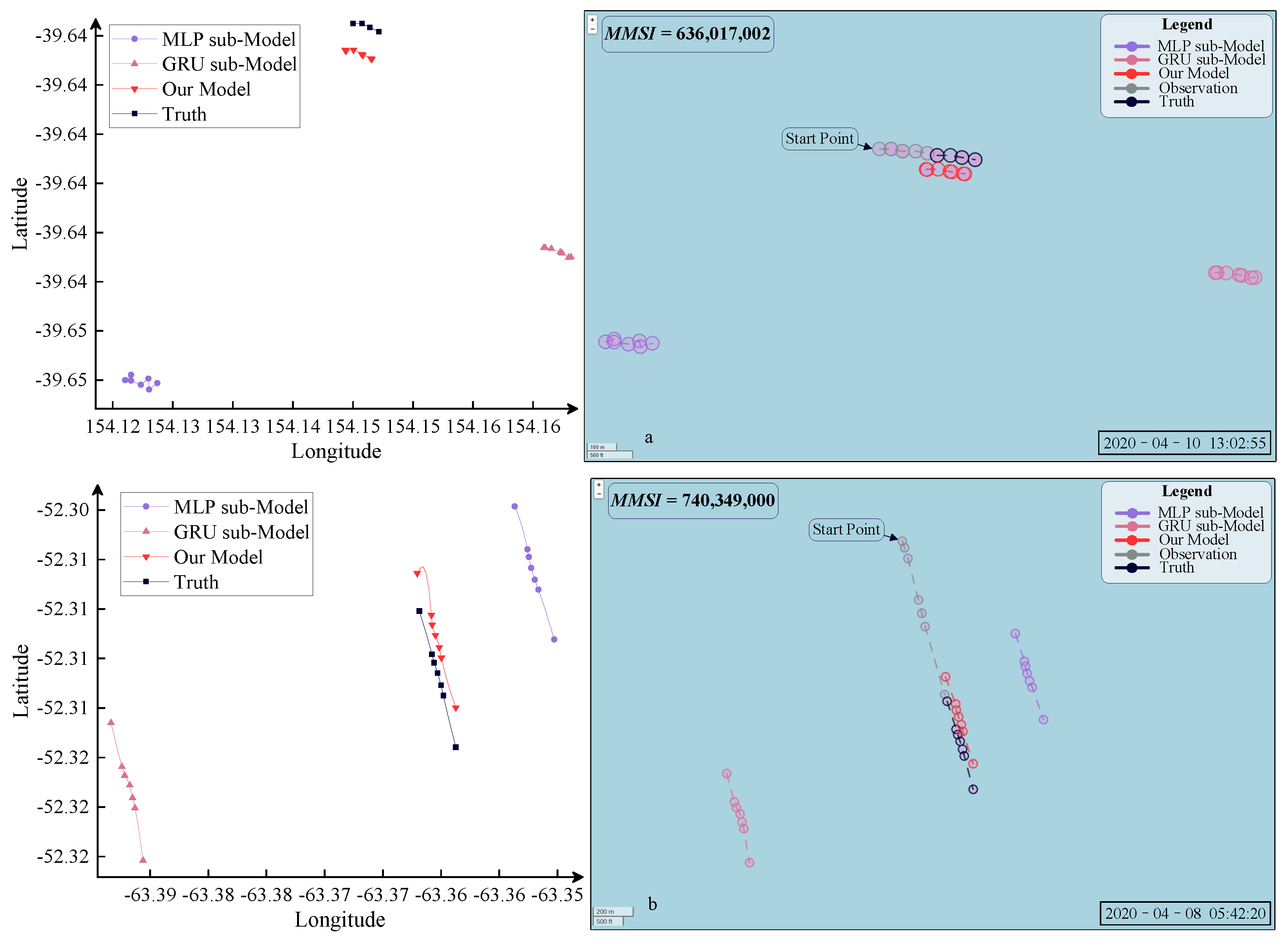
We extracted the ship’s trajectory data (
= 636,017,002) from the Australian dataset and the ship’s trajectory data (
= 740,349,000) from the Argentina dataset, and we also drew a schematic diagram of the AMD model and sub-model trajectory. The AMD model predicted the trajectory more accurately than the single model, as shown in
Figure 6. Therefore, AIS-based and environmental-based multimodal data fusion prediction can improve the reliability of ship trajectory prediction.
5.3.2. Comparison of Different Types of Ships
There are many types of ships at sea, and the navigation characteristics of each ship are different. For example, obvious patterns can be seen in some ship tracks, while others are scattered due to a lack of regularity. The results of the prediction model differ depending on the vessel type. As shown in
Table 7, there are eight types of ship data in the Australian dataset.
The data of these eight ship types were separated from the dataset; then, our trained AMD model was used to predict the experimental results for different ship type datasets. As shown in
Figure 7, under the
and
evaluation metrics, the ship types of 20 (wing-effect craft) and 40 (high-speed craft) had the best prediction results. This may be related to the satellite AIS receivers exceeding the distance limit. In general, land-based AIS receivers cannot effectively collect ship data due to distance limitations, but satellites can overcome this limitation.
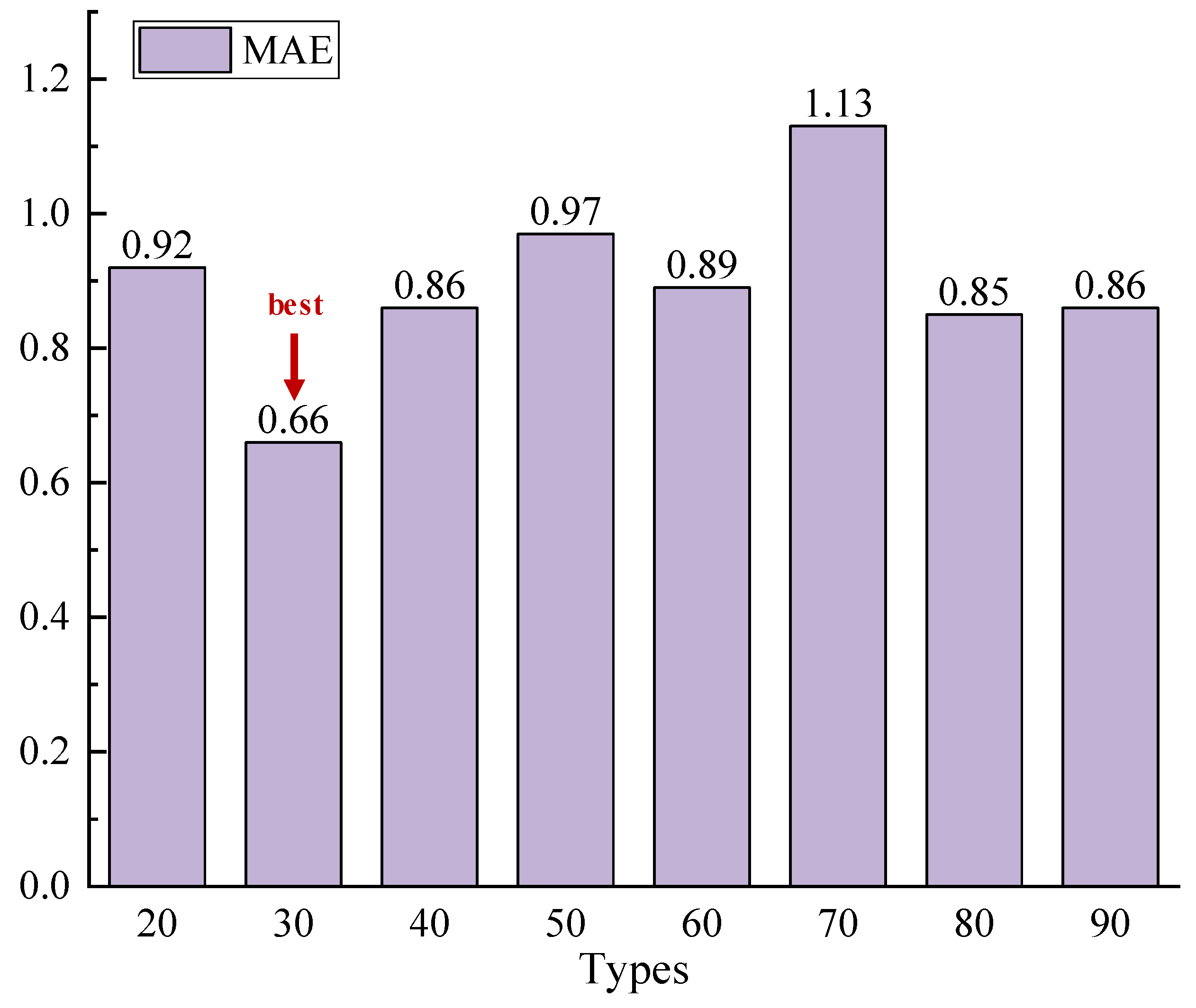
As shown in
Figure 8, when the ship type = 30 (fishing boat), the error of the AMD model is the smallest. This is because fishing boats often operate in designated activity areas, and the AMD model can learn certain regular vessel trajectory characteristics more easily. Notably, the scientific magnitudes of the
and
evaluation indicators were very small, and the errors between the different types of ships were not very different. Moreover, the
evaluation index showed that the prediction results of the various types of boats hardly differed. The AMD model predicted similar results for different types of ships, thereby proving that the AMD model can be well adapted for the prediction of ship trajectories.
5.4. Ablation Experiments Used to Verify the AMD Model’s Superiority
5.4.1. Comparison of the Prediction Results of Different Network Structures
In contrast to using AIS datasets to study the methods for predicting ship trajectories, this study also combined environmental modal data. Both AIS data and environmental data exhibited temporal sequence features. We compared the AIS and environmental data learning networks with typical networks to verify the superiority of the multimodal datasets. As shown in
Table 8, five variant models were set up for comparison. The data training process and evaluation indicators were consistent with the proposed AMD method.
Figure 9 shows the experimental results of the variant model on the two datasets. The multimodal merger prediction network consisting of MLP and GRU networks performed best. The reason for this was that the ship navigation data in the two sea areas were dense, and the spatio-temporal information data were sufficient; thus, the AIS data have linear entity characteristics. Therefore, utilizing MLP works best in the AIS data extraction network. However, the space–time information itself was not directly related. We employed the nearest time and shortest distance techniques to combine the two types of modal data, thereby establishing a correlation between the environmental and spatio-temporal information. It had a weakly nonlinear time series data characteristic. Thus, the GRU network was the best in terms of environmental data extraction.
5.4.2. Comparison of the Prediction Results under Various Combinations of Environmental Factors
This study explicitly considered three environmental factors: wind (including wind speed and direction), visibility, and air temperature. This section details the series of experiments that were set up to verify whether considering sufficient environmental factors is necessary to improve the AMD model’s reliability. Specifically, six comparison experiment groups were created using the control variable method. The AIS data input dimension information remained unchanged and the environmental data factor input type changed. That is, the environmental dataset contains only win factors; only factors; only factors; and factors; and factors; and and factors. The AMD method we designed was trained on these six comparison datasets to obtain a model; then, the prediction results were obtained when the model was applied to the test dataset.
Table 9 shows the prediction results of our model for various comparison datasets. In the RMSE evaluation metric, our method is at least 56.56% better than other combinations of environmental factors (including only
factors). According to
Figure 10, the AMD model was the most accurate when considering all three environmental factors together. Therefore, from the prediction results, it is reasonable for the experimental results to be different under different combinations of environmental factors because they have different effects on ship navigation. For example, if the wind speed is too high, the ship’s navigation will be disrupted, thus causing it to veer off course or move slowly. When visibility is poor, ships often use safer navigation methods, such as traveling at low speeds. In terms of the
and
evaluation metrics, temperature factors are considered as having a better effect than considering wind factors. However, in terms of the
evaluation index, the impact of temperature factors on the model is considerably smaller than other environmental factors (such as wind or visibility). This is reasonable because the effects of temperature factors on ship navigation are relatively small in real-world navigation conditions.
We recorded the navigation route of the ship with
= 538,008,487 in a specific area of Australia.
Figure 11 shows that the AMD model-predicted trajectory was closer to the actual value when considering the three environmental factors. In comparison, the effect was significantly worse when one or two factors were considered. In summary, considering as many environmental factors as possible when the aim is to improve the AMD model’s reliability is of positive importance. Therefore, including all three environmental factors in the AMD model can improve its reliability from the perspective of multimodal data.
6. Conclusions
To improve the ability to predict ship trajectories utilizing multimodal datasets, we proposed a ship trajectory prediction model that adapts to satellite multimodal AIS and environmental data. Unlike most existing studies that only consider a ship’s historical spatio-temporal trajectory data, the AMD model also considers the maritime environmental factors that affect ship navigation. Various modalities of data, such as space–time and environmental data, exhibit various effects on ship trajectory prediction. Thus, the multimodal feature extraction network was designed to obtain multimodal data features. Specifically, we associated two types of modal data through the closest timestamp and shortest distance methods, which were then used to construct multimodal datasets. Then, an effective modal data extraction network was designed to obtain multimodal data features, and a weighted sum method was used to fuse multimodal feature prediction output.
The AMD model realized the fusion of multimodal data, and the realized multimodal data features in addition to the spatio-temporal data were needed to ensure the prediction model’s reliability. Numerous experimental results proved that the AMD model improves the RMSE and MAPE metrics by at least 55.4% and 57.09%, respectively, when compared to the advanced baseline model. In addition, the superiority of the AMD model was verified by comparing the prediction performance with critical components, and the prediction results were obtained by considering different ship types. Finally, the effectiveness of the AMD model design was demonstrated through a series of ablation experiments. However, in a real-world maritime traffic service system, various modalities of data related to ship navigation exist, and the performance of existing prediction models can still be improved.
Although this study explored a multimodal data adaptive prediction model, there remain various areas to further improve the prediction performance. Our future work will employ attention mechanisms to improve the AMD model’s ability to learn characteristic elements based on multimodal data. These include the acceleration and deceleration behavior of ships during navigation, abnormal ship behavior in extreme weather environments, etc. Moreover, the navigation characteristics of different types of vessels should be further studied, thereby encompassing their business behaviors and navigation characteristics in diverse maritime scenarios.
Author Contributions
Conceptualization, Y.X. (Ye Xiao) and J.L.; Data curation, Y.X. (Ye Xiao); Formal analysis, Y.X. (Ye Xiao); Funding acquisition, Y.X. (Ye Xiao), Y.H., and J.L.; Investigation, Y.X. (Yi Xiao) and Q.L.; Methodology, Y.X. (Ye Xiao) and Y.H.; Project administration, Y.X. (Ye Xiao) and Y.H.; Resources, Y.H. and Q.L.; Software, Y.X. (Ye Xiao); Supervision, Y.H.; Validation, Y.X. (Ye Xiao), Y.H. and J.L.; Visualization, Y.X. (Yi Xiao); Writing—original draft, Y.X. (Ye Xiao); Writing—review and editing, Y.H., J.L., and Y.X. (Yi Xiao). All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Distinguished Youth Fund Project of Hunan Province (grant no. 2022JJ10018).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets used and/or analyzed during the current study are available from the corresponding authors on reasonable request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Tian, X.; Yan, R.; Liu, Y.; Shuaian, W. A smart predict-then-optimize method for targeted and cost-effective maritime transportation. Transport. Res. B-Meth. 2023, 172, 32–52. [Google Scholar] [CrossRef]
- Kaklis, D.; Kontopoulos, I.; Varlamis, I.; Emiris, I.Z.; Varelas, T. Trajectory mining and routing: A cross-sectoral approach. J. Mar. Sci. Eng. 2024, 12, 157. [Google Scholar] [CrossRef]
- Chondrodima, E.; Pelekis, N.; Pikrakis, A.; Theodoridis, Y. An efficient LSTM neural network-based framework for vessel location forecasting. IEEE Trans. Intell. Transp. Syst. 2023, 24, 4872–4888. [Google Scholar] [CrossRef]
- Zhang, M.; Yu, S.R.; Chung, K.S.; Chen, M.L.; Yuan, Z.M. Time-optimal path planning and tracking based on nonlinear model predictive control and its application on automatic berthing. Ocean Eng. 2023, 286, 115228. [Google Scholar] [CrossRef]
- Xiao, Y.; Li, X.; Yao, W.; Chen, J.; Hu, Y. Bidirectional Data-Driven Trajectory Prediction for Intelligent Maritime Traffic. IEEE Trans. Intell. Transp. Syst. 2022, 24, 1773–1785. [Google Scholar] [CrossRef]
- Jia, H.; Yang, Y.; An, J.; Fu, R. A ship trajectory prediction model based on attention-BILSTM optimized by the whale optimization algorithm. Appl. Sci. 2023, 13, 4907. [Google Scholar] [CrossRef]
- Gao, D.; Zhu, Y.; Soares, C.G. Uncertainty modelling and dynamic risk assessment for long-sequence AIS trajectory based on multivariate Gaussian Process. Reliab. Eng. Syst. Saf. 2023, 230, 108963. [Google Scholar] [CrossRef]
- Park, J.; Jeong, J.; Park, Y. Ship trajectory prediction based on bi-LSTM using spectral-clustered AIS data. J. Mar. Sci. Eng. 2021, 9, 1037. [Google Scholar] [CrossRef]
- Wang, X.; Xiao, Y. A deep learning model for ship trajectory prediction using automatic identification system (AIS) data. Information 2023, 14, 212. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, J.; Gong, P.; Chen, C.; Han, B.; Wu, Z. Trajectory prediction of seagoing ships in dynamic traffic scenes via a gated spatio-temporal graph aggregation network. Ocean Eng. 2023, 287, 115886. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Xing, H. A novel method for ship trajectory prediction in complex scenarios based on spatio-temporal features extraction of AIS data. Ocean Eng. 2023, 281, 114846. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, J.; Hirdaris, S.; Zhang, M.; Tian, W. An interpretable knowledge-based decision support method for ship collision avoidance using AIS data. Reliab. Eng. Syst. Saf. 2023, 230, 108919. [Google Scholar] [CrossRef]
- Xu, X.; Wu, B.; Xie, L.; Teixeira, Â.P.; Yan, X. A novel ship speed and heading estimation approach using radar sequential images. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11107–11120. [Google Scholar] [CrossRef]
- Srivastava, S.; Kumar, L.; Jeyanthi, R.; Deepa, K.; Aggrawal, V. Framework for ship trajectory forecasting based on linear stationary models using automatic identification system. Procedia Comput. Sci. 2023, 218, 1463–1474. [Google Scholar] [CrossRef]
- Xu, J.; Gong, J.; Wang, L.; Li, Y. Integrating k-means clustering and LSTM for enhanced ship heading prediction in oblique stern wave. J. Mar. Sci. Eng. 2023, 11, 2185. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, J.; Billah, M.M.; Zhang, T. ABiLSTM based prediction model for AUV trajectory. J. Mar. Sci. Eng. 2023, 11, 1295. [Google Scholar] [CrossRef]
- Wu, Y.; Deng, L.; He, W. BwimNet: A novel method for identifying moving vehicles utilizing a modified encoder-decoder architecture. Sensors 2020, 20, 7170. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Liu, J.; Liu, R.W.; Wu, W.; Liu, Y. Interval prediction of vessel trajectory based on lower and upper bound estimation and attention-modified LSTM with bayesian optimization. Physica A 2023, 630, 129275. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, Z.; Zhou, X.; Li, B.; Zhang, L.; Zhen, E.; Wang, S.; Zhao, Z.; Guo, Z. METO-S2S: A S2S based vessel tra-jectory prediction method with multiple-semantic encoder and type-oriented decoder. Ocean Eng. 2023, 277, 114248. [Google Scholar] [CrossRef]
- Xu, X.; Liu, C.; Li, J.; Miao, Y.; Zhao, L. Long-term trajectory prediction for oil tankers via grid-based clustering. J. Mar. Sci. Eng. 2023, 11, 1211. [Google Scholar] [CrossRef]
- Zhang, M.; Kujala, P.; Musharraf, M.; Zhang, J.; Hirdaris, S. A machine learning method for the prediction of ship motion trajectories in real operational conditions. Ocean Eng. 2023, 283, 114905. [Google Scholar] [CrossRef]
- Sedaghat, A.; Arbabkhah, H.; Jafari Kang, M.; Hamidi, M. Deep learning applications in vessel dead reck-oning to deal with missing automatic identification system data. J. Mar. Sci. Eng. 2024, 12, 152. [Google Scholar] [CrossRef]
- Dong, Q.; Wang, N.; Song, J.; Hao, L.; Liu, S.; Han, B.; Qu, K. Math-data integrated prediction model for ship maneuvering motion. Ocean Eng. 2023, 285, 115255. [Google Scholar] [CrossRef]
- Chen, X.; Wei, C.; Zhou, G.; Wu, H.; Wang, Z.; Biancardo, S.A. Automatic identification system (AIS) data supported ship trajectory prediction and analysis via a deep learning model. J. Mar. Sci. Eng. 2022, 10, 1314. [Google Scholar] [CrossRef]
- Bao, K.; Bi, J.; Gao, M.; Sun, Y.; Zhang, X.; Zhang, W. An improved ship trajectory prediction based on AIS data using MHA-BiGRU. J. Mar. Sci. Eng. 2022, 10, 804. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, Z.; Zhou, Z.; Chen, X.; Wu, B.; Wang, S. A ship trajectory prediction method based on GAT and LSTM. Ocean Eng. 2023, 289, 116159. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Zhang, Z.; Xing, H. Big data driven vessel trajectory prediction based on sparse mul-ti-graph convolutional hybrid network with spatio-temporal awareness. Ocean Eng. 2023, 287, 115695. [Google Scholar] [CrossRef]
- Xiao, Z.; Fu, X.; Zhang, L.; Zhang, W.; Liu, R.W.; Liu, Z.; Goh, R.S.M. Big data driven vessel trajectory and navigating state prediction with adaptive learning, motion modeling and particle filtering techniques. IEEE Trans. Intell. Transp. Syst. 2020, 23, 3696–3709. [Google Scholar] [CrossRef]
- Zhang, M.; Huang, L.; Wen, Y.; Zhang, J.; Huang, Y.; Zhu, M. Short-term trajectory prediction of maritime vessel using k-nearest neighbor points. J. Mar. Sci. Eng. 2022, 10, 1939. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Z.; Zhao, C.; Chen, X.; He, J.; Zhang, C. A three-stage multi-objective heterogeneous inte-grated model with decomposition-reconstruction mechanism and adaptive segmentation error correction method for ship motion multi-step prediction. Adv. Eng. Inform. 2023, 56, 101954. [Google Scholar] [CrossRef]
- Lang, X.; Wu, D.; Mao, W. Physics-informed machine learning models for ship speed prediction. Expert. Syst. Appl. 2024, 238, 121877. [Google Scholar] [CrossRef]
- Wu, W.; Chen, P.; Chen, L.; Mou, J. Ship trajectory prediction: An integrated approach using Con-vLSTM-based sequence-to-sequence model. J. Mar. Sci. Eng. 2023, 11, 1484. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, H.; Guo, Y. Toward multimodal vessel trajectory prediction by modeling the distribution of modes. Ocean Eng. 2023, 282, 115020. [Google Scholar] [CrossRef]
- Mehri, S.; Alesheikh, A.A.; Basiri, A. A context-aware approach for vessels’ trajectory prediction. Ocean Eng. 2023, 282, 114916. [Google Scholar] [CrossRef]
- Ghimire, S.; Nguyen-Huy, T.; Prasad, R.; Deo, R.C.; Casillas-Perez, D.; Salcedo-Sanz, S.; Bhandari, B. Hybrid convolutional neural network-multilayer perceptron model for solar radiation prediction. Cogn. Comput. 2023, 15, 645–671. [Google Scholar] [CrossRef]
- Li, H.; Gao, W.; Xie, J.; Yen, G.G. Multiobjective bilevel programming model for multilayer perceptron neural networks. Inform. Sciences 2023, 642, 119031. [Google Scholar] [CrossRef]
- Mirzavand Borujeni, S.; Arras, L.; Srinivasan, V.; Samek, W. Explainable sequence-to-sequence GRU neural network for pollution forecasting. Sci. Rep. 2023, 13, 9940. [Google Scholar] [CrossRef] [PubMed]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Perera, L.P.; Oliveira, P.; Soares, C.G. Maritime traffic monitoring based on vessel detection, tracking, state estimation, and trajectory prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Liu, R.W.; Nie, J.; Garg, S.; Xiong, Z.; Zhang, Y.; Hossain, M.S. Data-driven trajectory quality improvement for promoting intelligent vessel traffic services in 6G-enabled maritime IoT systems. IEEE Internet Things J. 2020, 8, 5374–5385. [Google Scholar] [CrossRef]
- Capobianco, S.; Millefiori, L.M.; Forti, N.; Braca, P.; Willett, P. Deep learning methods for vessel trajectory prediction based on recurrent neural networks. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4329–4346. [Google Scholar] [CrossRef]
- Gao, D.W.; Zhu, Y.S.; Zhang, J.F.; He, Y.K.; Yan, K.; Yan, B.R. A novel MP-LSTM method for ship tra-jectory prediction based on AIS data. Ocean Eng. 2021, 228, 108956. [Google Scholar] [CrossRef]
- You, L.; Xiao, S.; Peng, Q.; Claramunt, C.; Han, X.; Guan, Z.; Zhang, J. St-seq2seq: A spatio-temporal feature-optimized seq2seq model for short-term vessel trajectory prediction. IEEE Access 2020, 8, 218565–218574. [Google Scholar] [CrossRef]
Figure 1.
Structural diagrams of the networks. (a) The GRU. (b) The LSTM.
Figure 1.
Structural diagrams of the networks. (a) The GRU. (b) The LSTM.
Figure 2.
The architecture diagram of the adaptive multimodal data model in this research.
Figure 2.
The architecture diagram of the adaptive multimodal data model in this research.
Figure 3.
The sea area selected for this study. The red dots in the figure are ship track points. (a) Australia. (b) Argentina.
Figure 3.
The sea area selected for this study. The red dots in the figure are ship track points. (a) Australia. (b) Argentina.
Figure 4.
Schematic diagram of the predicted trajectories of ships under different models on the Australian and Argentina datasets. (a) Vessel trajectories ( = 636,092,810) in the Australian dataset. (b) Vessel trajectories ( = 740,349,000) in the Argentina dataset.
Figure 4.
Schematic diagram of the predicted trajectories of ships under different models on the Australian and Argentina datasets. (a) Vessel trajectories ( = 636,092,810) in the Australian dataset. (b) Vessel trajectories ( = 740,349,000) in the Argentina dataset.
Figure 5.
Compare MAE indicators in the AMD model with the sub-extraction model.
Figure 5.
Compare MAE indicators in the AMD model with the sub-extraction model.
Figure 6.
Comparison of the predicted trajectories of the AMD model with the sub-extraction model. (a) Vessel trajectories ( = 636,017,002) in the Australian dataset. (b) Vessel trajectories ( = 740,349,000) in the Argentina dataset.
Figure 6.
Comparison of the predicted trajectories of the AMD model with the sub-extraction model. (a) Vessel trajectories ( = 636,017,002) in the Australian dataset. (b) Vessel trajectories ( = 740,349,000) in the Argentina dataset.
Figure 7.
Comparison of the trajectory prediction results of the different types of ships.
Figure 7.
Comparison of the trajectory prediction results of the different types of ships.
Figure 8.
Comparison of the errors between predicted values and true values for different types of ship trajectories.
Figure 8.
Comparison of the errors between predicted values and true values for different types of ship trajectories.
Figure 9.
Comparison of the prediction performance of the variant models on the two datasets: (a) Australia dataset. (b) Argentina dataset.
Figure 9.
Comparison of the prediction performance of the variant models on the two datasets: (a) Australia dataset. (b) Argentina dataset.
Figure 10.
The error between the predicted value and the actual value of the AMD model under different environmental factors.
Figure 10.
The error between the predicted value and the actual value of the AMD model under different environmental factors.
Figure 11.
A schematic diagram of the trajectory predicted by the AMD model under different environmental factors.
Figure 11.
A schematic diagram of the trajectory predicted by the AMD model under different environmental factors.
Table 1.
Detailed configuration information of the training process.
Table 1.
Detailed configuration information of the training process.
| Name | Value |
|---|
| Learning rate | 0.001 |
| Batches | 64 |
| Optimizer | Adam |
| Epochs | 300 |
| Loss function | MSE |
| Activation | tanh |
Table 2.
Latitude and longitude area.
Table 2.
Latitude and longitude area.
| | Longitude | Latitude |
|---|
| |
Min.
|
Max.
|
Min.
|
Max.
|
|---|
| Australia | 105.65 | 178.85 | −54.92 | −6.56 |
| Argentina | −100.36 | −30.46 | −66.91 | −32.23 |
Table 3.
Preprocessing entries for AIS and environmental datasets.
Table 3.
Preprocessing entries for AIS and environmental datasets.
| Datasets | AIS Data (Rows) | Environmental Data (Rows) |
|---|
|
Raw Data Entries
|
Preprocessed Data Entries
|
Ships
|
Raw Data Entries
|
Preprocessed Data Entries
|
|---|
| Australia | 795,132 | 314,865 | 176 | 1,168,140 | 380,066 |
| Argentina | 1,485,687 | 631,027 | 227 | 872,199 | 217,859 |
Table 4.
Detail parameter table for baseline models.
Table 4.
Detail parameter table for baseline models.
| Model | Learning Rate | Input Layer | Batch Size | Activation |
|---|
| LSTM [38] | 0.001 | 18 | 64 | tanh |
| GRU [39] | 0.001 | 18 | 64 | tanh |
| ANN [40] | 0.001 | 18 | 64 | tanh |
| BLSTM [41] | 0.005 | 18 | 5000 | tanh |
| EncDec [42] | 0.0001 | 18 | 200 | tanh |
| MPLSTM [43] | 0.001 | 18 | 64 | tanh |
| ST-Seq2seq [44] | 0.001 | 18 | 64 | tanh |
Table 5.
Comparison of the prediction results of the various models under Australian and Argentina datasets.
Table 5.
Comparison of the prediction results of the various models under Australian and Argentina datasets.
| Baseline Models | Australia Datasets | Argentina Datasets |
|---|
|
RMSE
()
|
MAPE
()
|
MAE
()
|
RMSE
()
|
MAPE
()
|
MAE
()
|
|---|
| LSTM [38] | 0.493 | 1.011 | 3.648 | 0.262 | 0.535 | 1.082 |
| GRU [39] | 0.362 | 0.454 | 4.005 | 0.343 | 0.826 | 1.663 |
| ANN [40] | 0.782 | 1.216 | 7.871 | 0.476 | 1.743 | 3.526 |
| BLSTM [41] | 1.043 | 1.710 | 6.776 | 0.775 | 2.418 | 5.656 |
| EncDec [42] | 0.913 | 1.847 | 6.924 | 0.434 | 1.273 | 2.687 |
| MPLSTM [43] | 0.397 | 0.913 | 2.835 | 0.386 | 0.695 | 2.073 |
| ST-Seq2seq [44] | 121.686 | 200.164 | 1450.614 | 52.652 | 200.713 | 450.236 |
| Our model | 0.161 | 0.195 | 0.843 | 0.254 | 0.244 | 0.624 |
Table 6.
Comparison of the AMD model with the sub-extraction model.
Table 6.
Comparison of the AMD model with the sub-extraction model.
| Datasets | Models | RMSE () | MAPE () |
|---|
| Australia dataset | MLP sub-model | 8.96 | 8.32 |
| GRU sub-model | 4.59 | 7.05 |
| Our | 1.61 | 1.95 |
| Argentina dataset | MLP sub-model | 3.52 | 8.66 |
| GRU sub-model | 3.22 | 5.83 |
| Our | 2.54 | 2.44 |
Table 7.
The different ship type numbers that correspond to ship types.
Table 7.
The different ship type numbers that correspond to ship types.
| Types Number | Type Names |
|---|
| 20 | Wing in ground (WIG) |
| 30 | Fishing |
| 40 | High speed craft (HSC) |
| 50 | Pilot vessel |
| 60 | Passenger |
| 70 | Cargo |
| 80 | Tanker |
| 90 | Other type |
Table 8.
The five variant models composed of typical network structures.
Table 8.
The five variant models composed of typical network structures.
| | Variant 1 | Variant 2 | Variant 3 | Variant 4 | Variant 5 |
|---|
| AIS ex-net | gru | lstm | gru | gru | bigru |
| Environmental ex-net | gru | lstm | bigru | lstm | mlp |
| Variant model | dgru | dlstm | grubigru | grulstm | bigrumlp |
Table 9.
Prediction results of the AMD model under different combinations of environmental factors (Australian dataset).
Table 9.
Prediction results of the AMD model under different combinations of environmental factors (Australian dataset).
| | win | vis | temp | win and vis | win and temp | temp and vis | win, vis and temp |
|---|
| RMSE () | 4.61 | 3.72 | 6.66 | 5.13 | 4.82 | 5.64 | 1.61 |
| MAPE () | 9.86 | 6.52 | 2.39 | 5.09 | 2.75 | 2.03 | 1.95 |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}