
Risk Analysis and Visualization of Merchant and Fishing Vessel Collisions in Coastal Waters: A Case Study of Fujian Coastal Area

 ,
,
Abstract
:1. Introduction
- When assessing collision risks, we innovatively adjust the ship domain for fishing vessels during their operations.
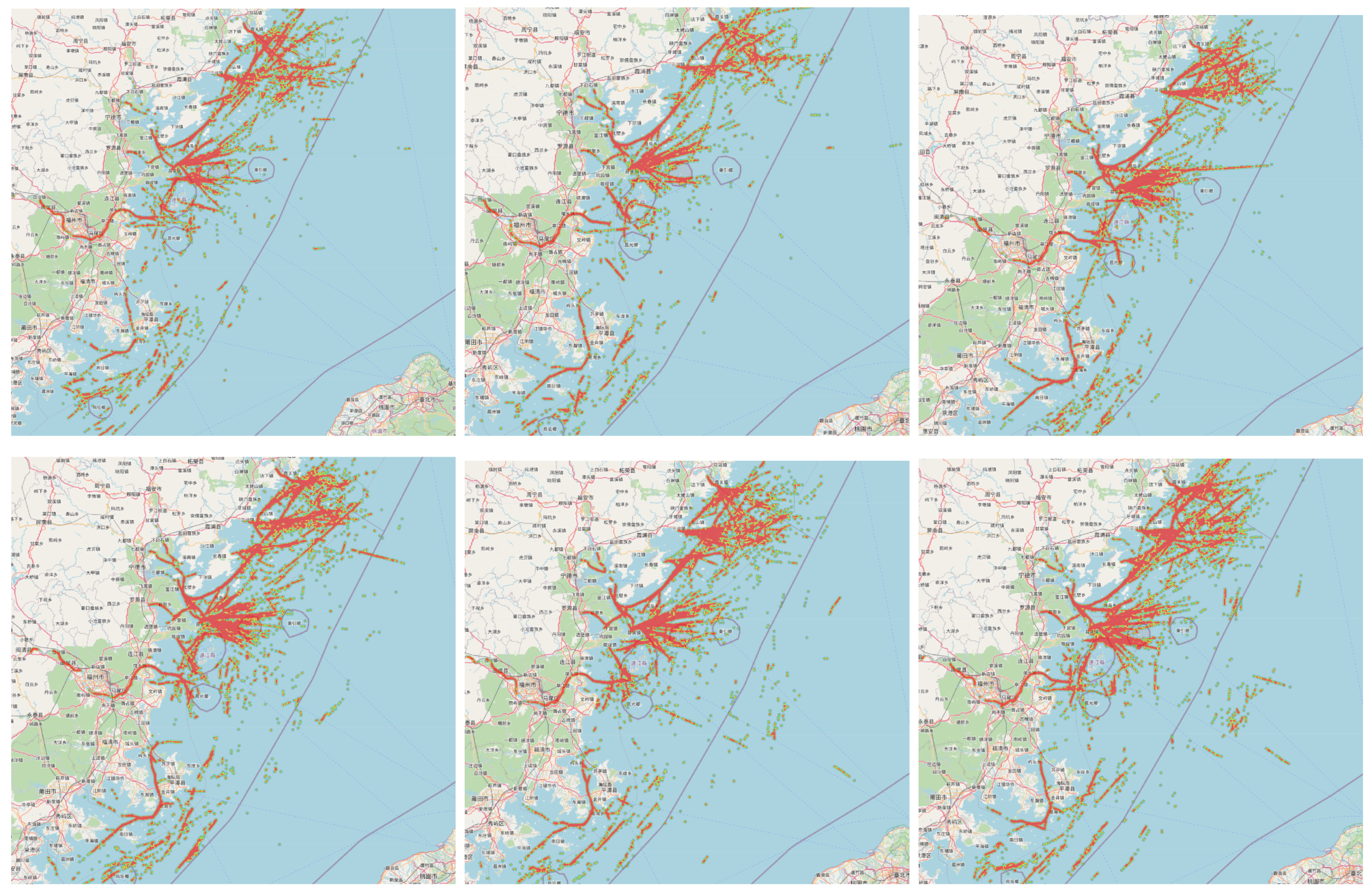
- We conduct a visual analysis of the temporal and spatial distribution of encounter risk data.
- We validate the accuracy of our risk assessment methodology using ship collision incidents from the past three years.
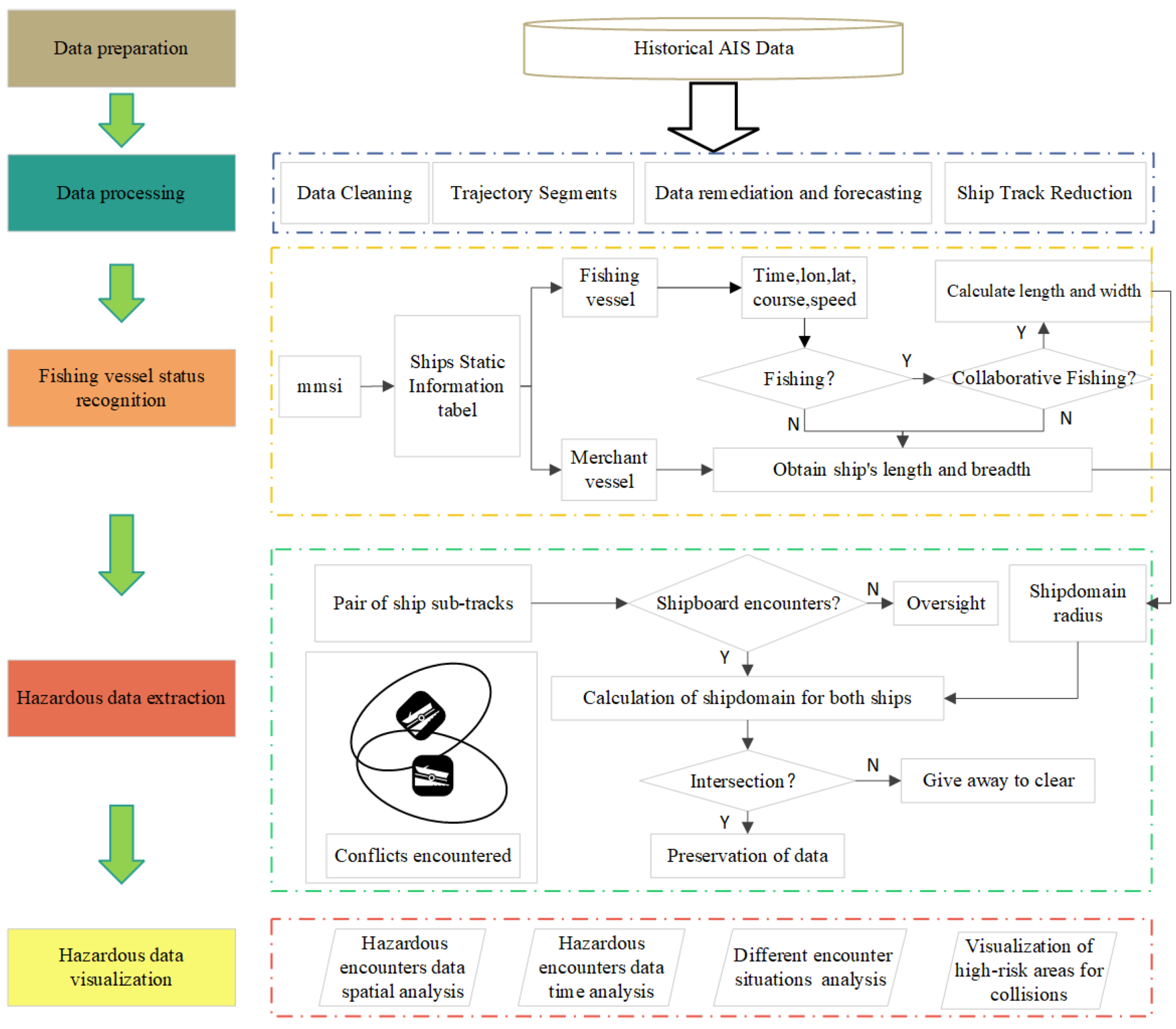
2. Methodology
2.1. Data Preprocessing
2.1.1. Data Cleaning
- Geographical coordinates located on land;
- Values exceeding the normal range (refer to Table 1 for data range);
- MMSI not conforming to specifications.
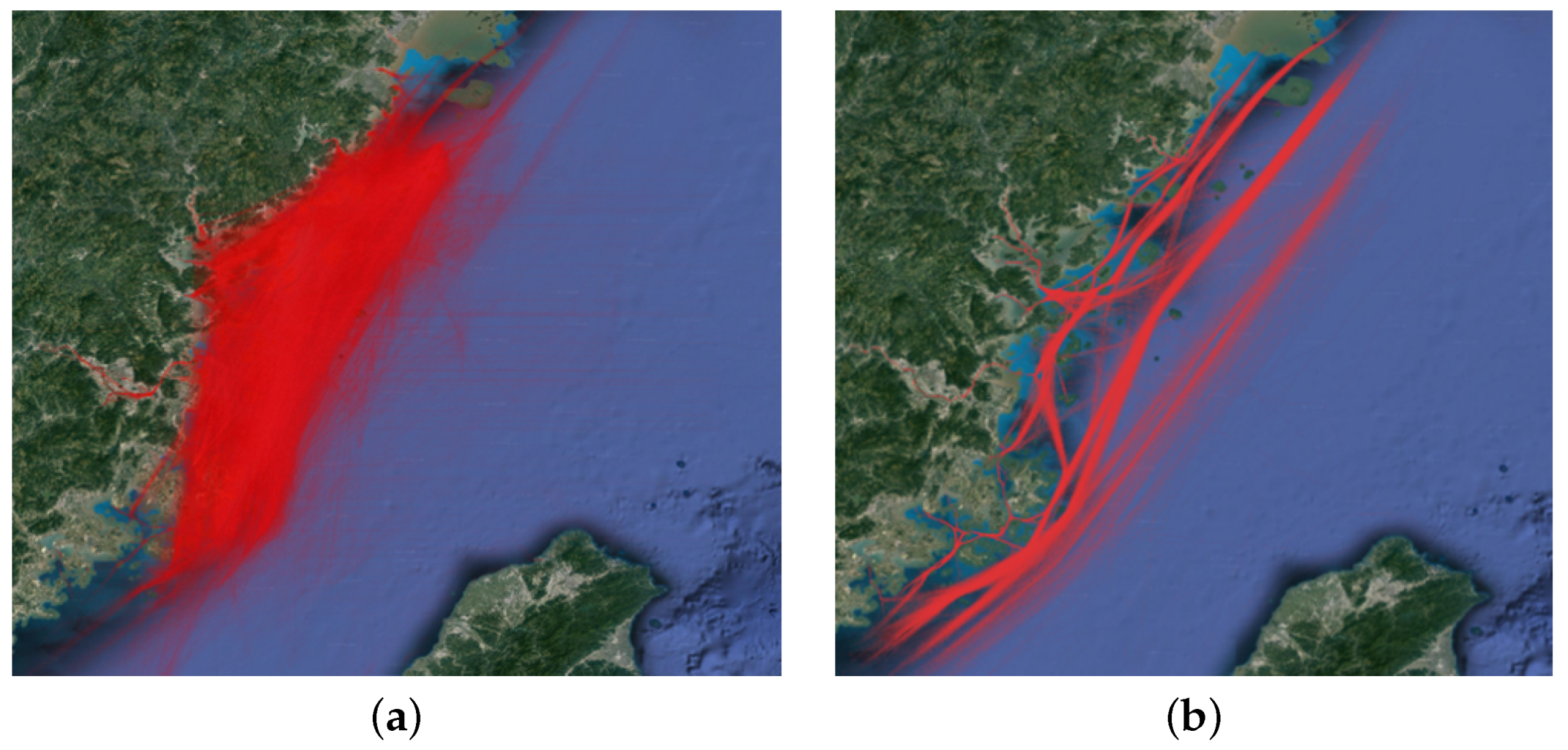
2.1.2. Trajectory Separation
2.1.3. Data Restoration
2.2. Identification of Fishing Vessel Operation Statuses
2.2.1. Characteristics of Fishing Vessel Operational Trajectories
- Trawling operation: characterized by frequent turns during operation to tow the net back and forth in a specific area.
- Gillnet operation: marked by dropping numerous drifting gillnets along a trajectory and returning along the same path to retrieve the nets.
- Purse seine operation: distinguished by deploying a net to encircle a target area, returning to the starting point, and then retrieving the net.
2.2.2. Fishing Boat Operation Status Judgment
- Normal navigation: Fishing vessels engaged in normal navigation exhibit relatively stable speed and direction, with no abrupt changes. Vessels with speeds greater than 2 knots and that maintain stable speed and heading within a 10 min interval are identified to be in a normal navigation state.
- Anchorage: Vessels at anchor may exhibit some speed due to factors like sea currents. Therefore, during processing, vessels with speeds below 2 knots and a substantial number of AIS data positions in close proximity—exhibiting a movement distance less than 0.1 nautical miles within a 10 min interval—are identified as vessels at anchor.
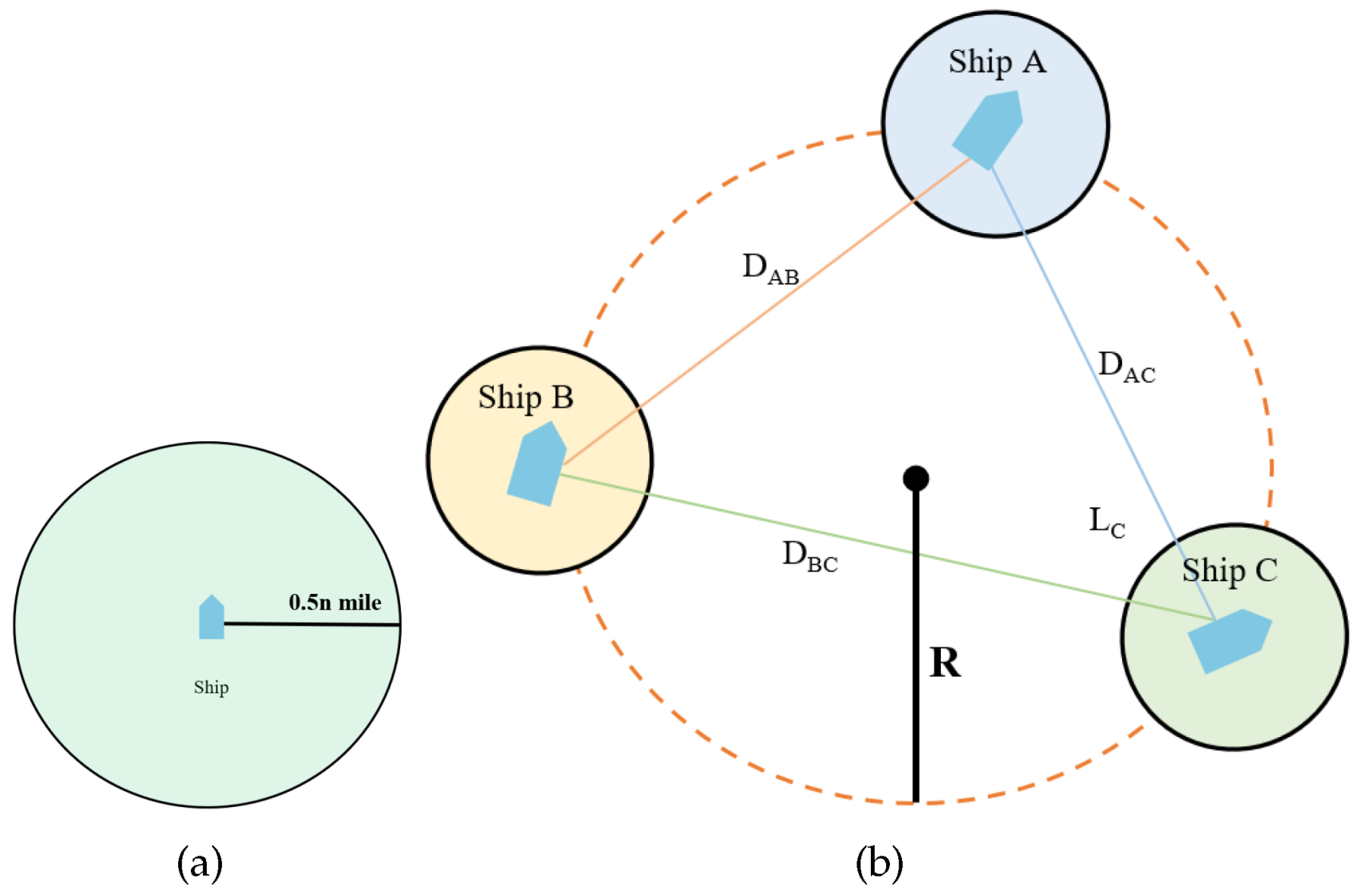
- Fishing: Identifying whether a fishing vessel is actively fishing relies on distinguishing trajectory characteristics that differ from normal navigation. Fishing vessels typically operate at speeds ranging from 2 to 5 knots. We identify vessels within this speed range and examine their trajectories to determine if they are engaged in fishing. If nearby vessels are also in a fishing state and are within 0.5 nautical miles, this is considered to be cooperative fishing. During this operation, the fishing vessel’s maneuverability is limited, and passing merchant vessels are advised to maintain a distance of at least 1 nautical mile.
2.3. Encounter Risk Data Mining and Visualization
2.3.1. Ship Domain Model
2.3.2. Calculation of DCPA and TCPA
2.3.3. Collision Risk Index
2.3.4. Risk Data Extraction
2.3.5. Risk Data Visualization
3. Experiments
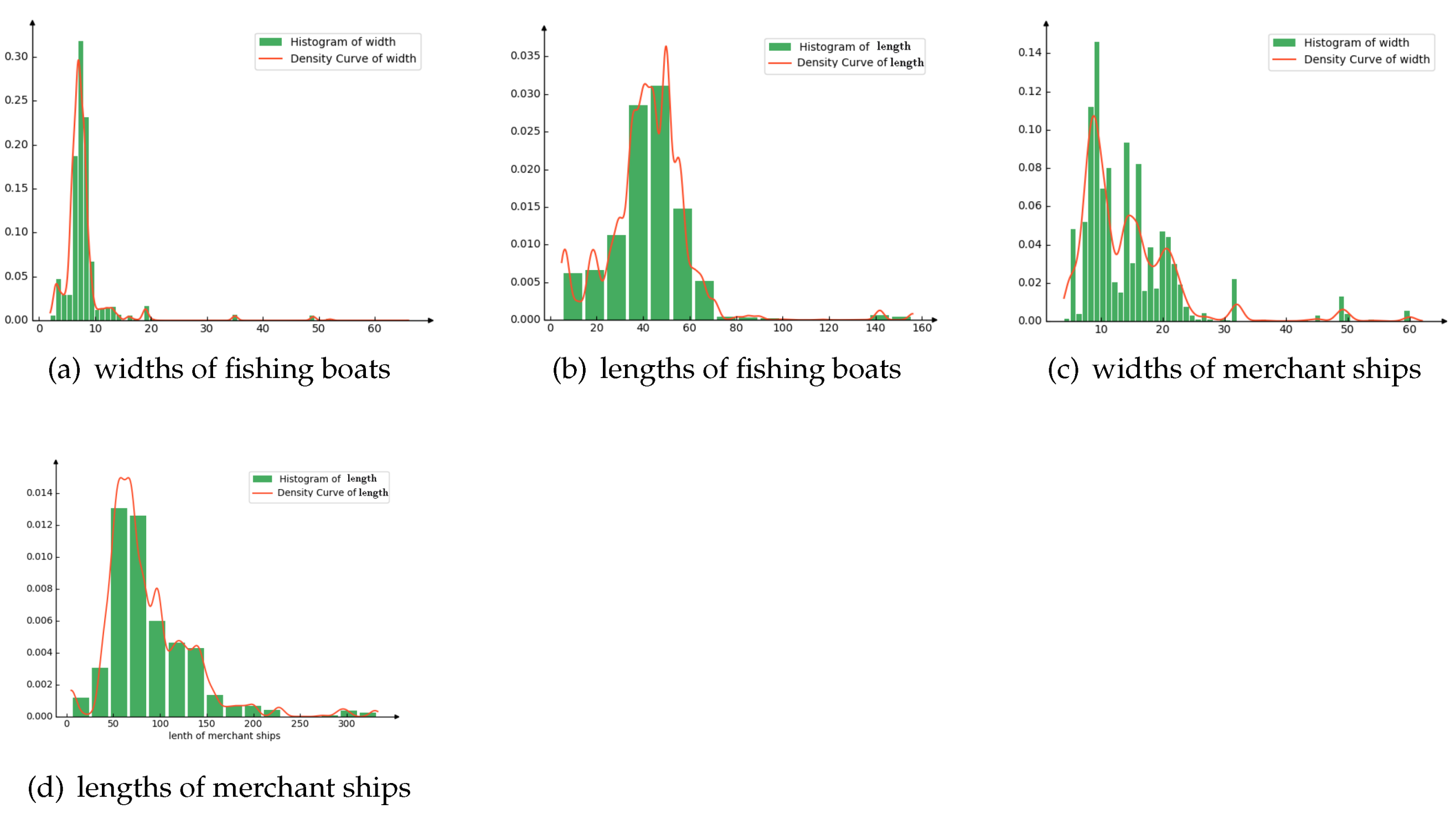
3.1. Analysis of the Characteristics of Dangerous Vessels
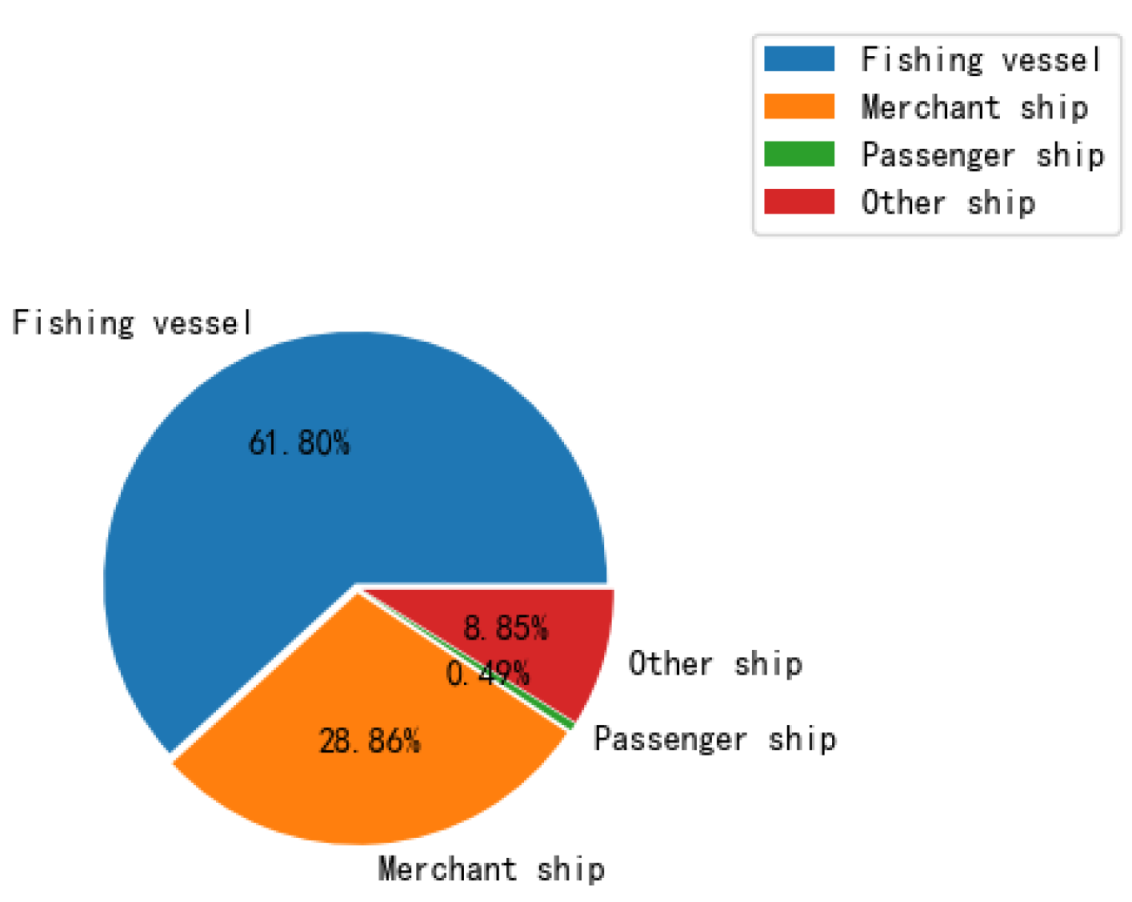
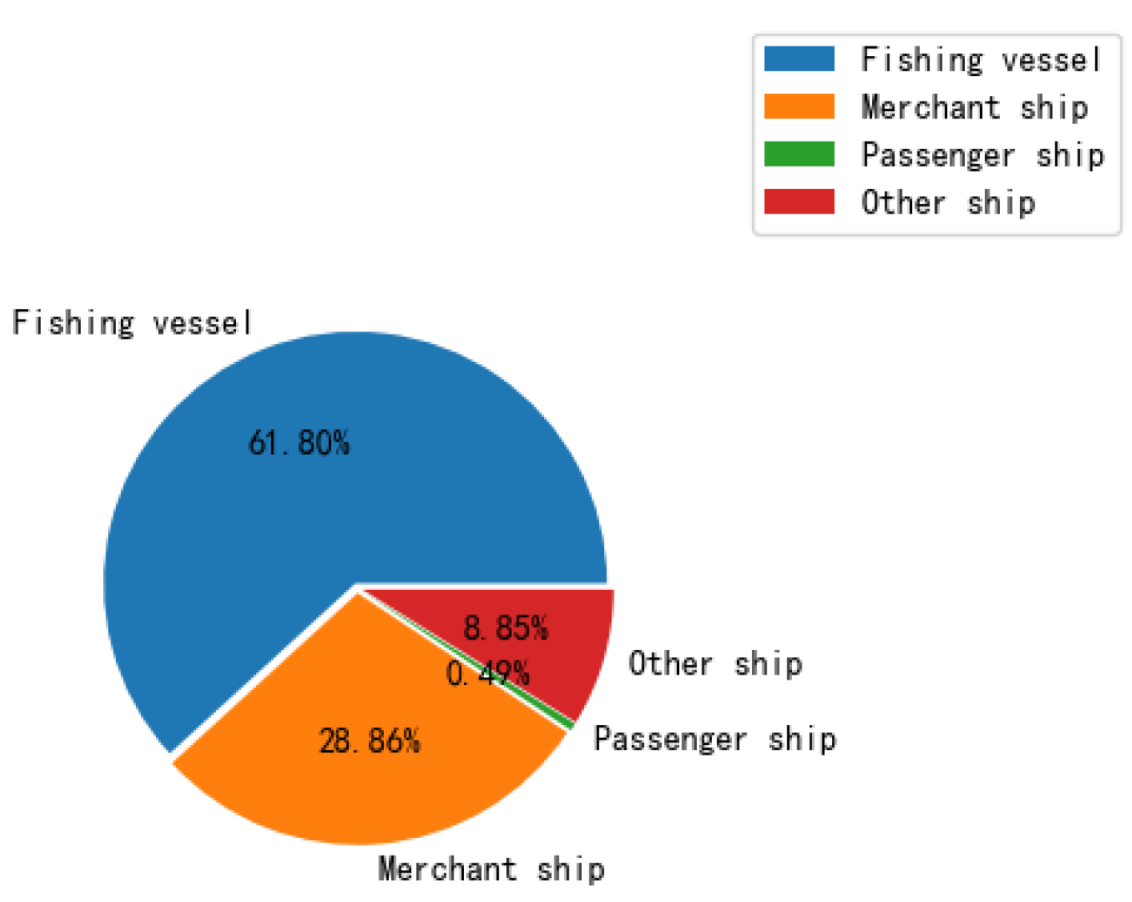
3.1.1. Ship Type Distribution in Encounter Scenarios
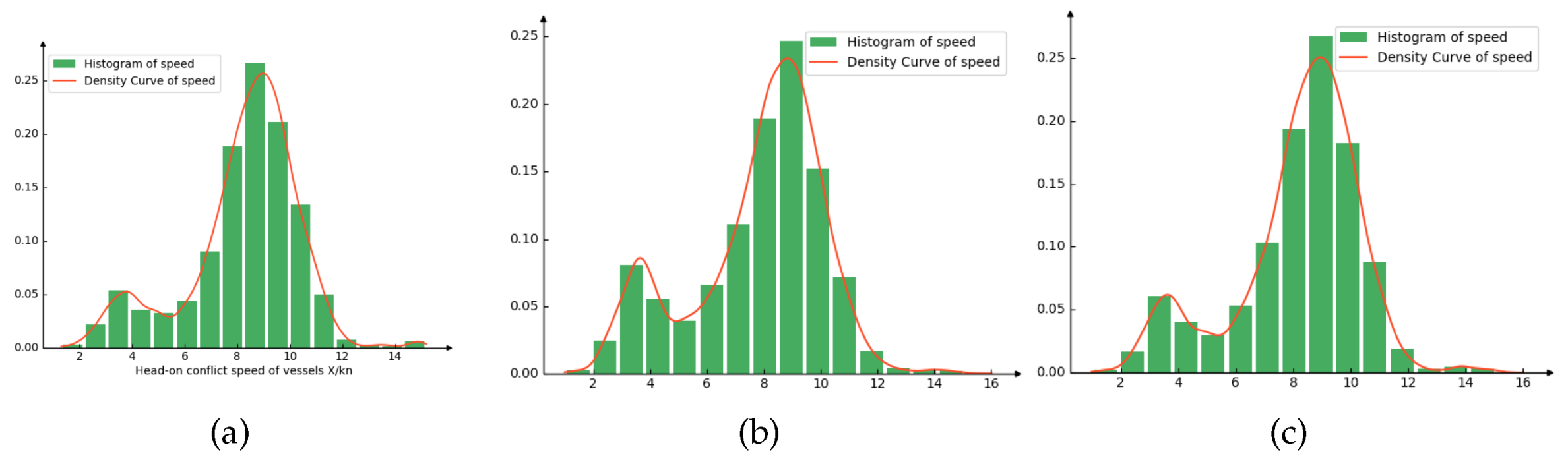
3.1.2. Speed Distribution of Encounters
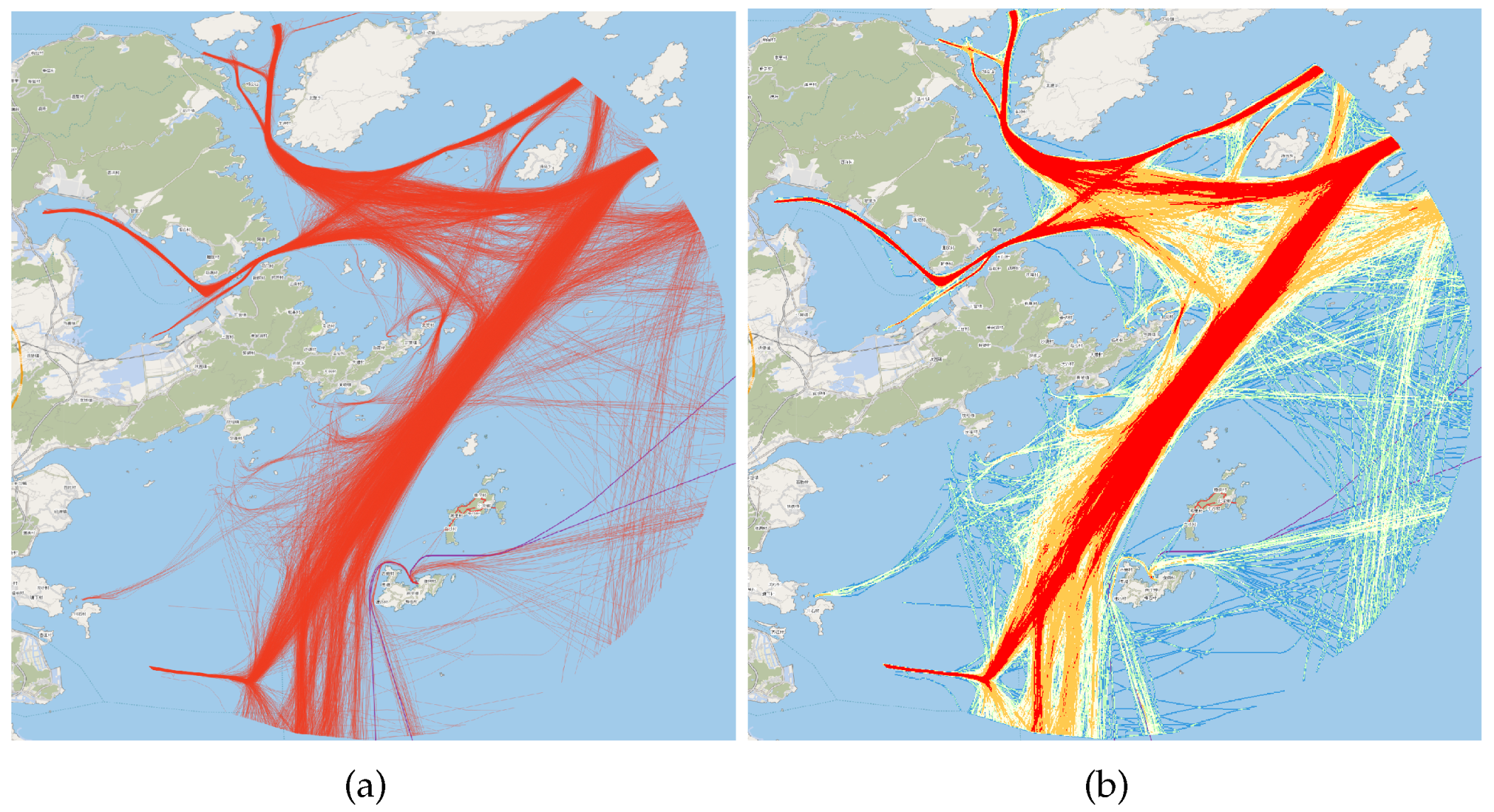
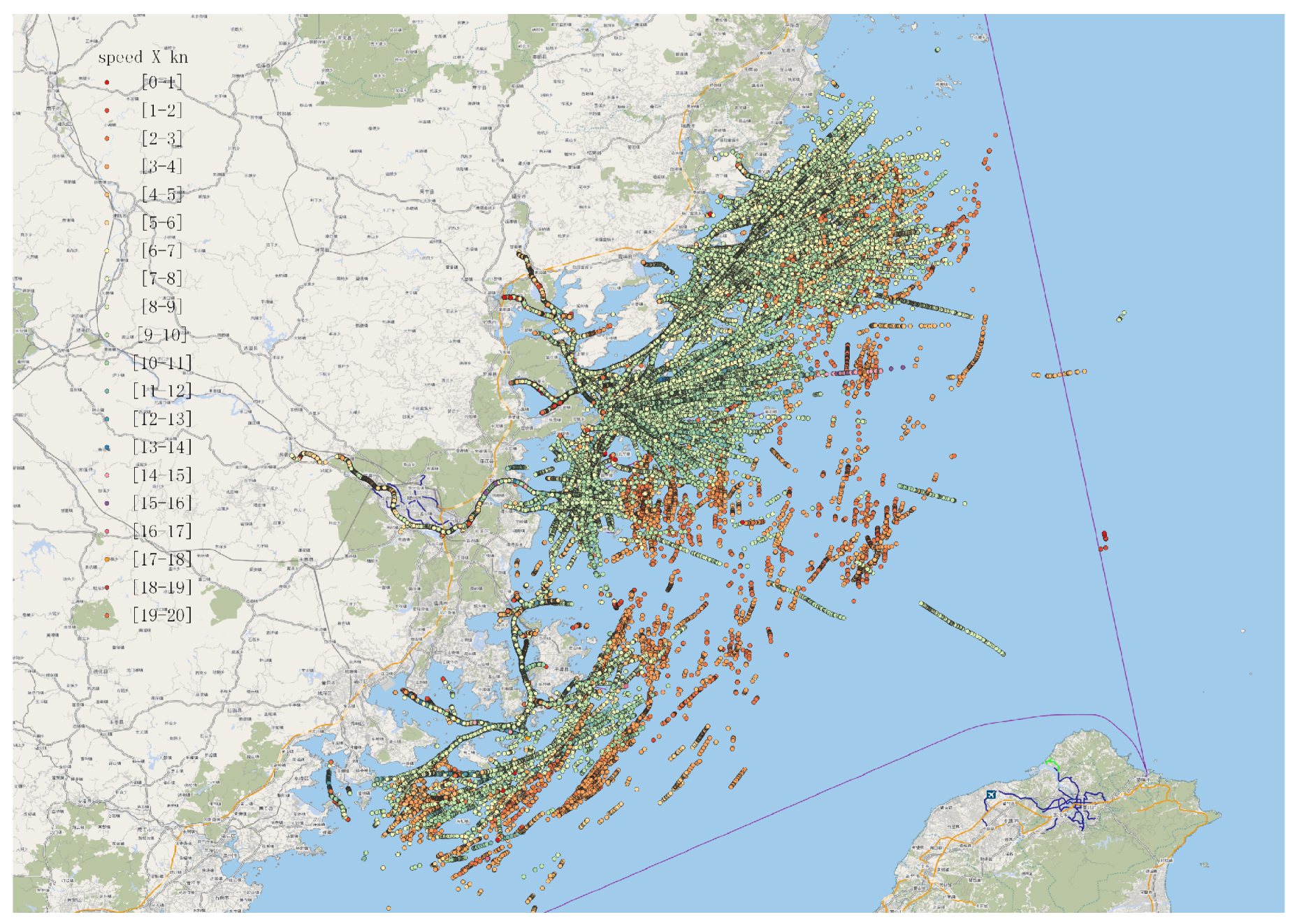
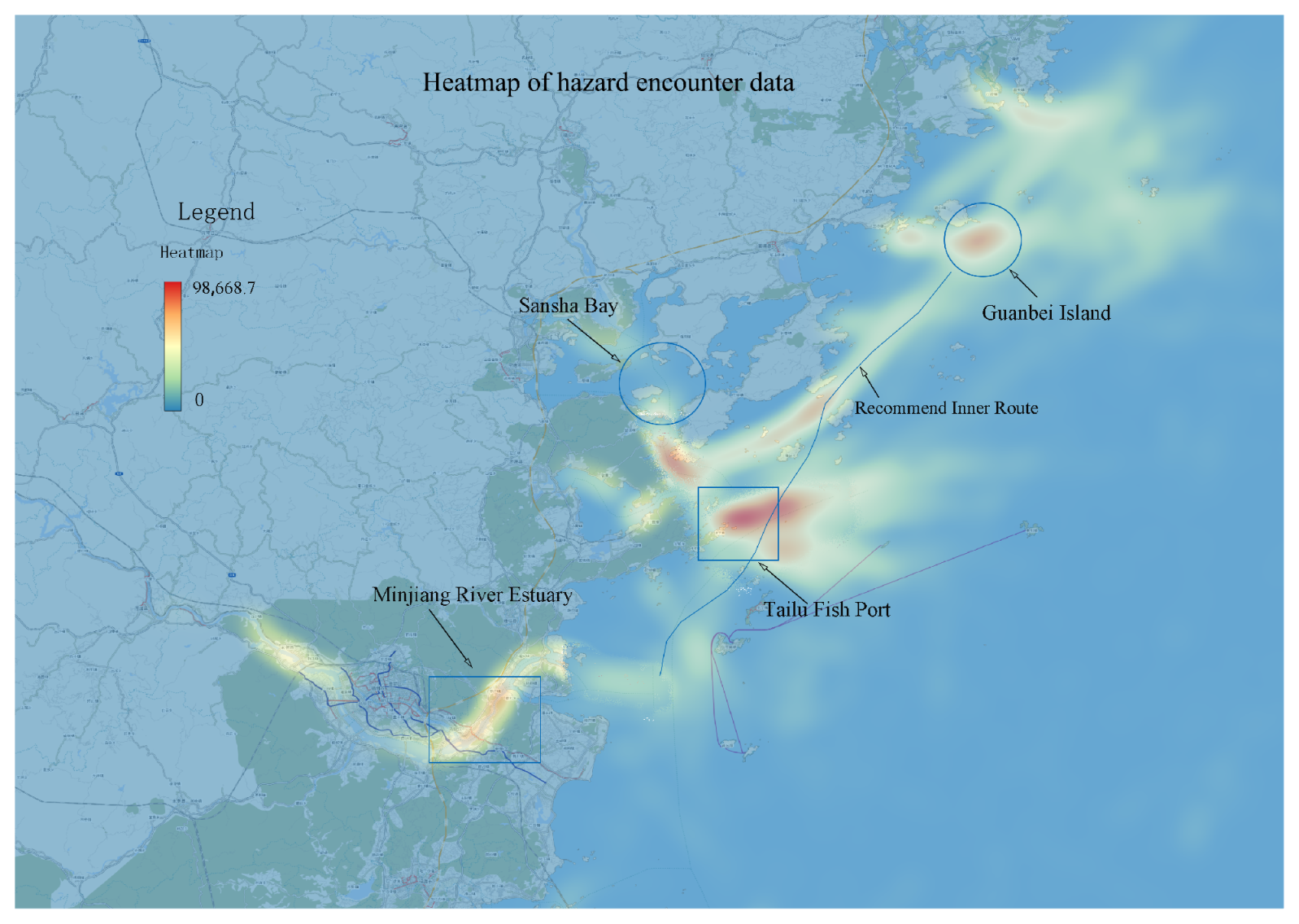
3.2. Spatial Distribution of Hazardous Encounter Events
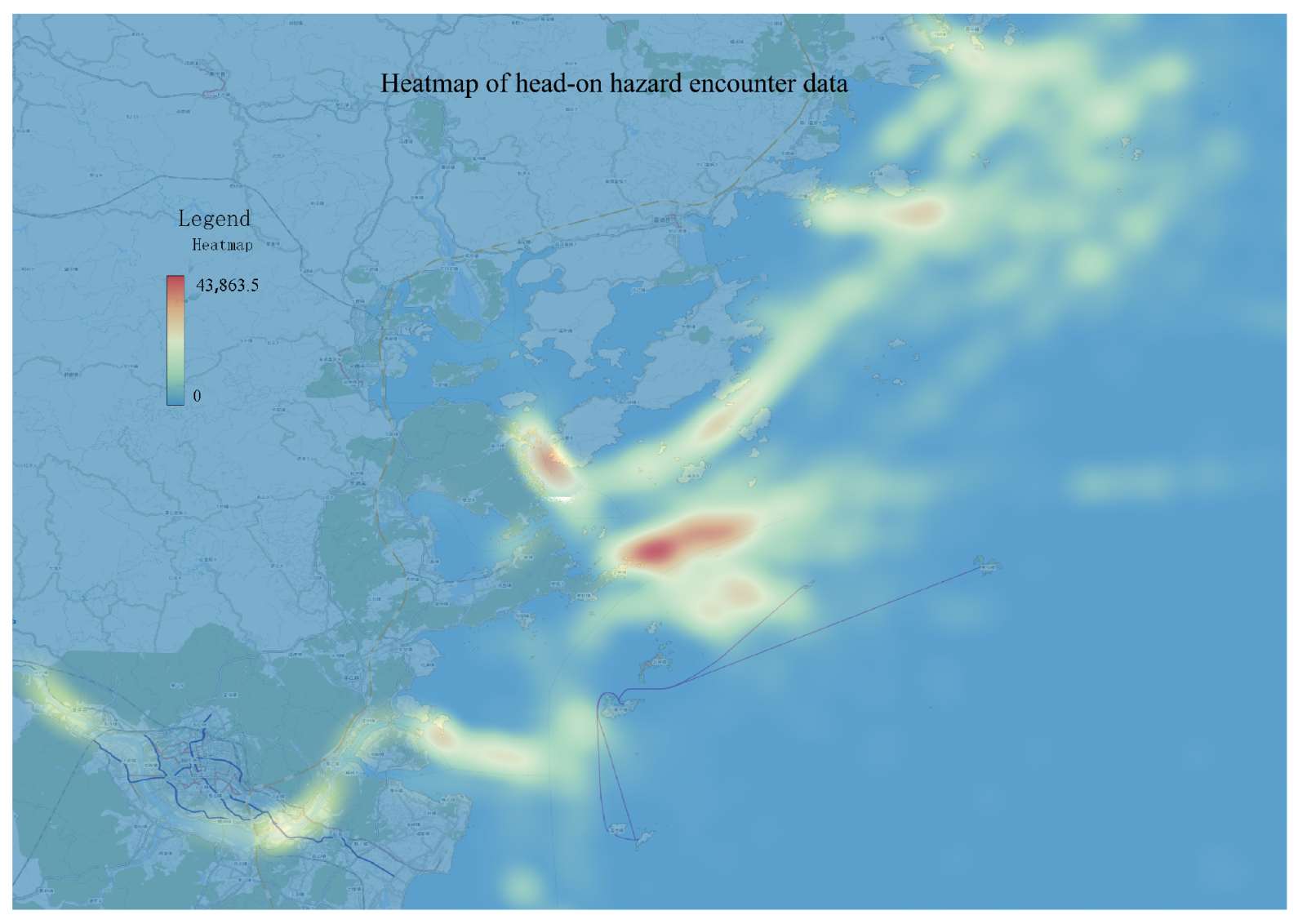
3.2.1. Spatial Distribution of Hazardous Head-On Encounter Scenarios
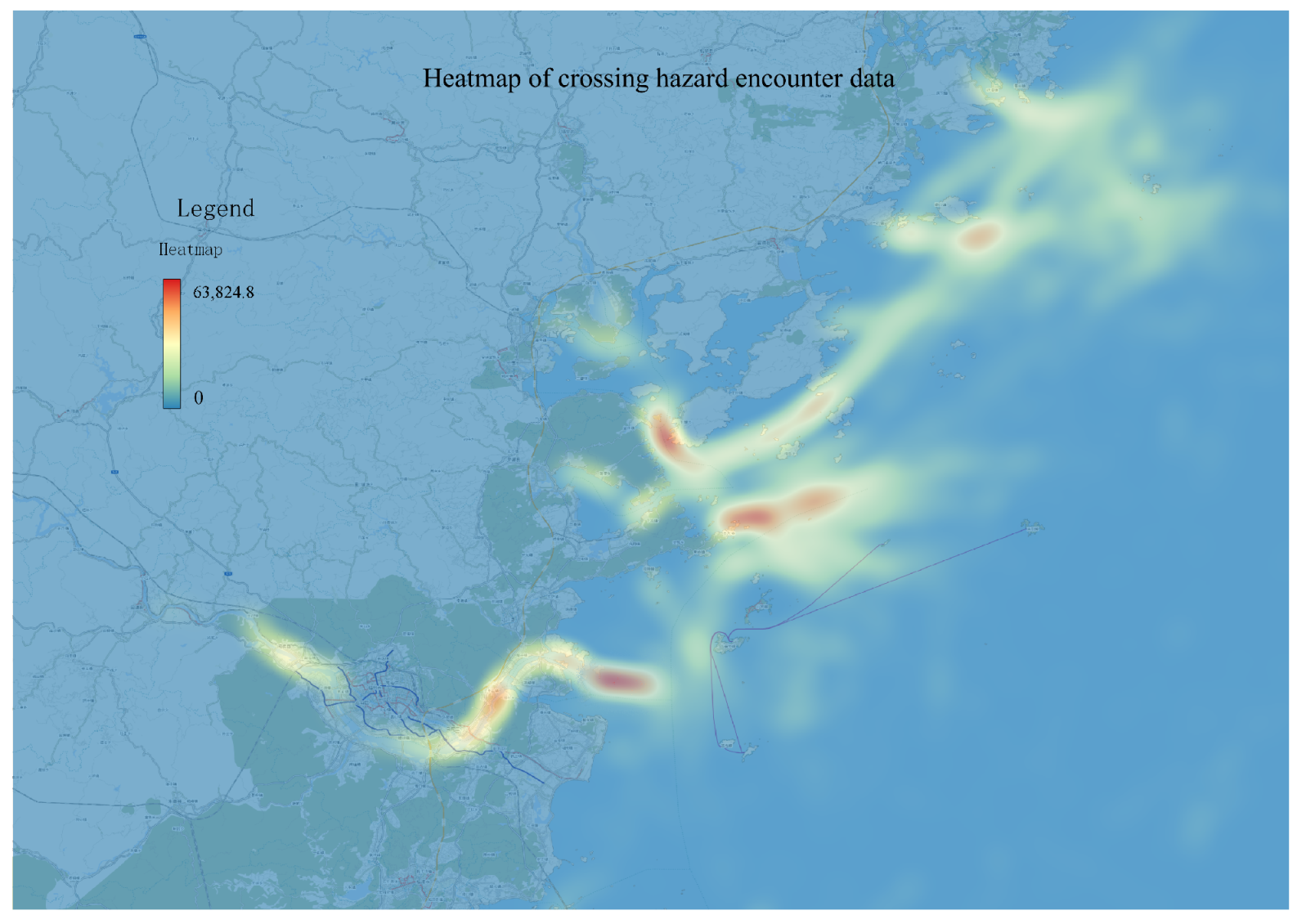
3.2.2. Spatial Distribution of Hazardous Crossing Encounter Scenarios
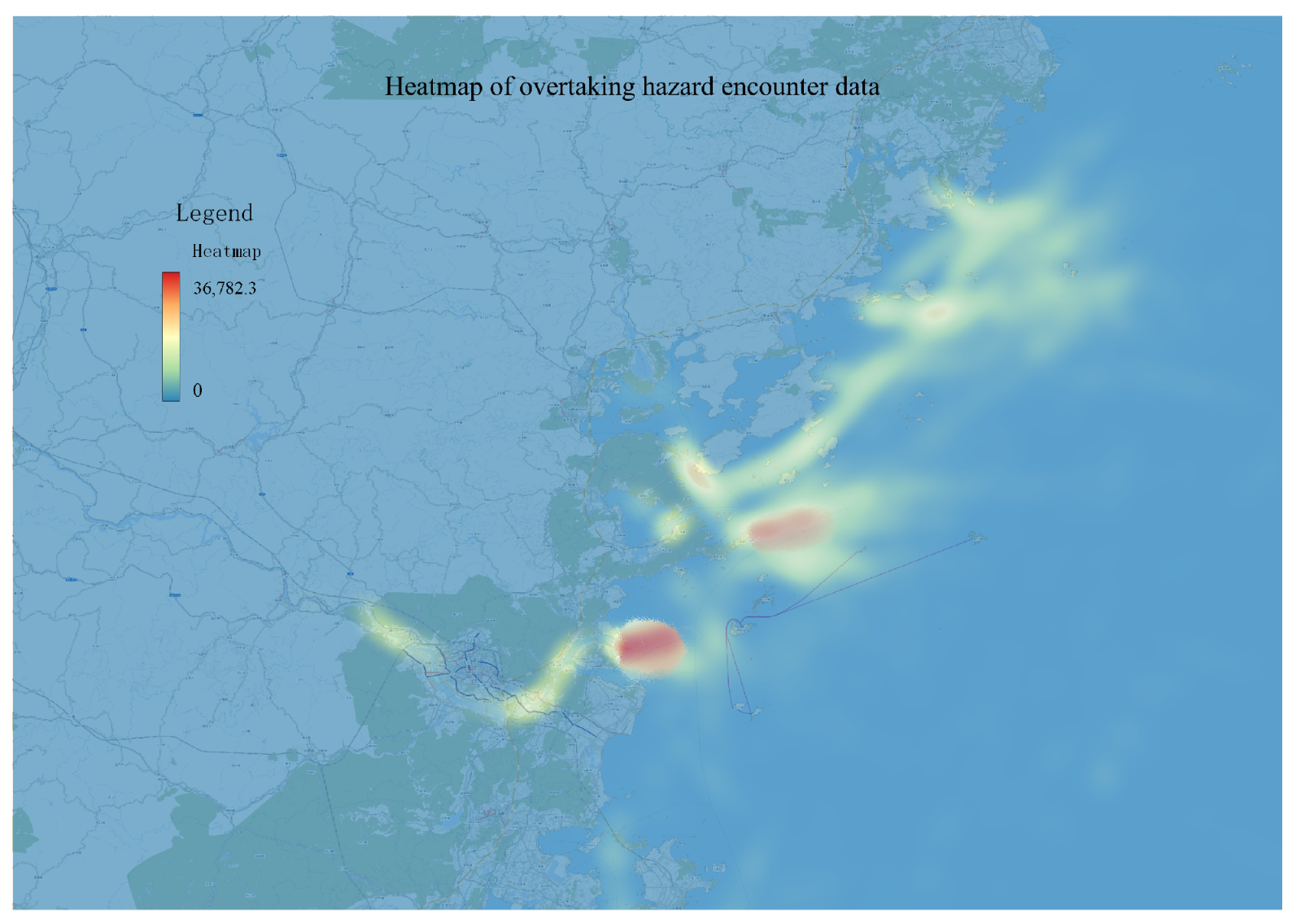
3.2.3. Spatial Distribution of Dangerous Overtaking Scenarios
3.3. Temporal Distribution of Hazardous Encounter Data
3.3.1. Distribution of Fishing Vessels in Hazardous Situations
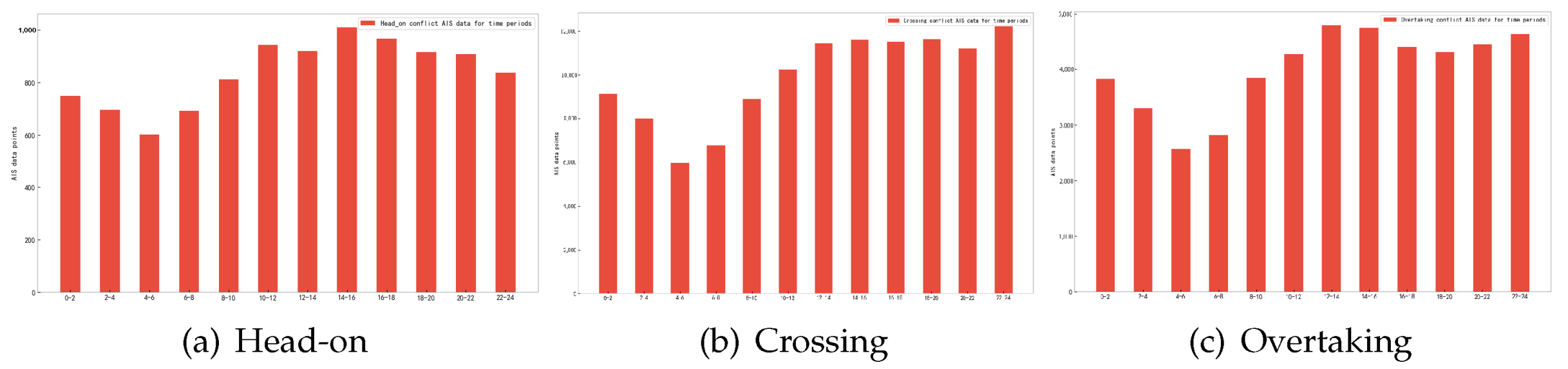
3.3.2. Temporal Distribution of Hazardous Encounter Events under Different Scenarios
3.3.3. Spatial and Temporal Distribution of Hazardous Encounter Events
4. Analysis and Discussion
4.1. Case Analysis of Collision Accidents
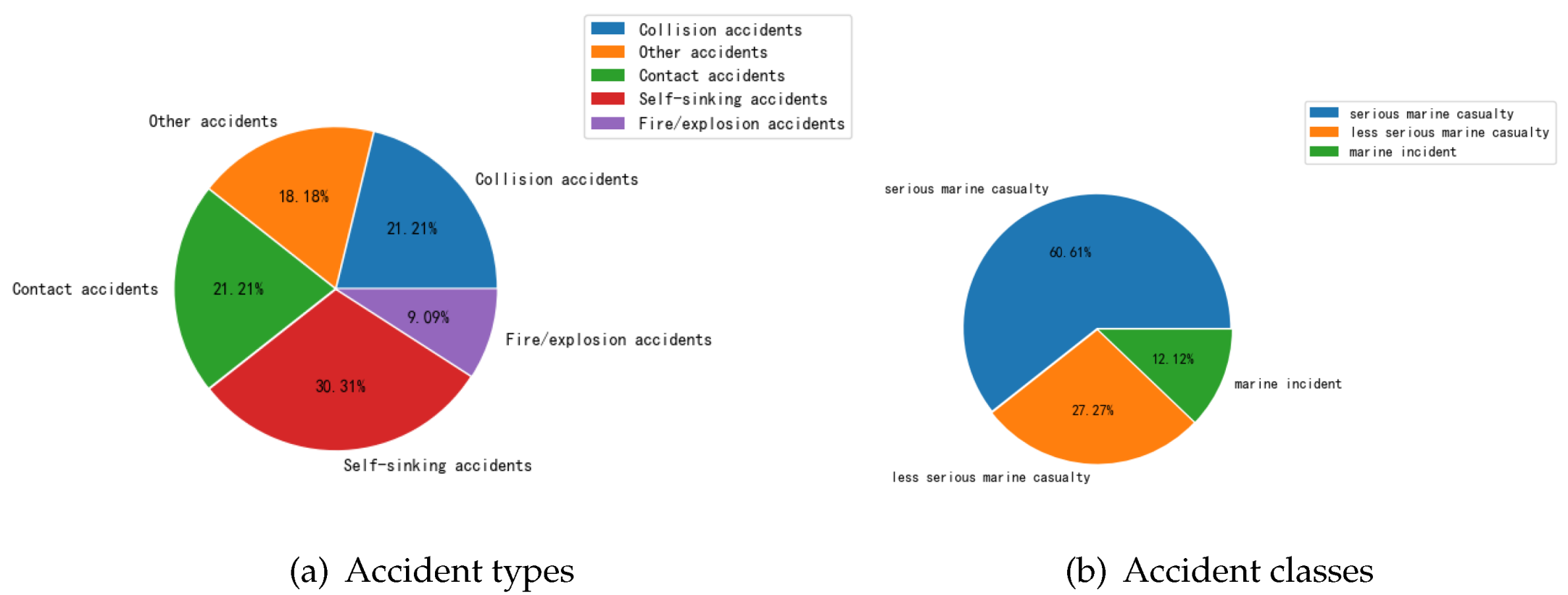
4.1.1. Marine Accident Data Statistics
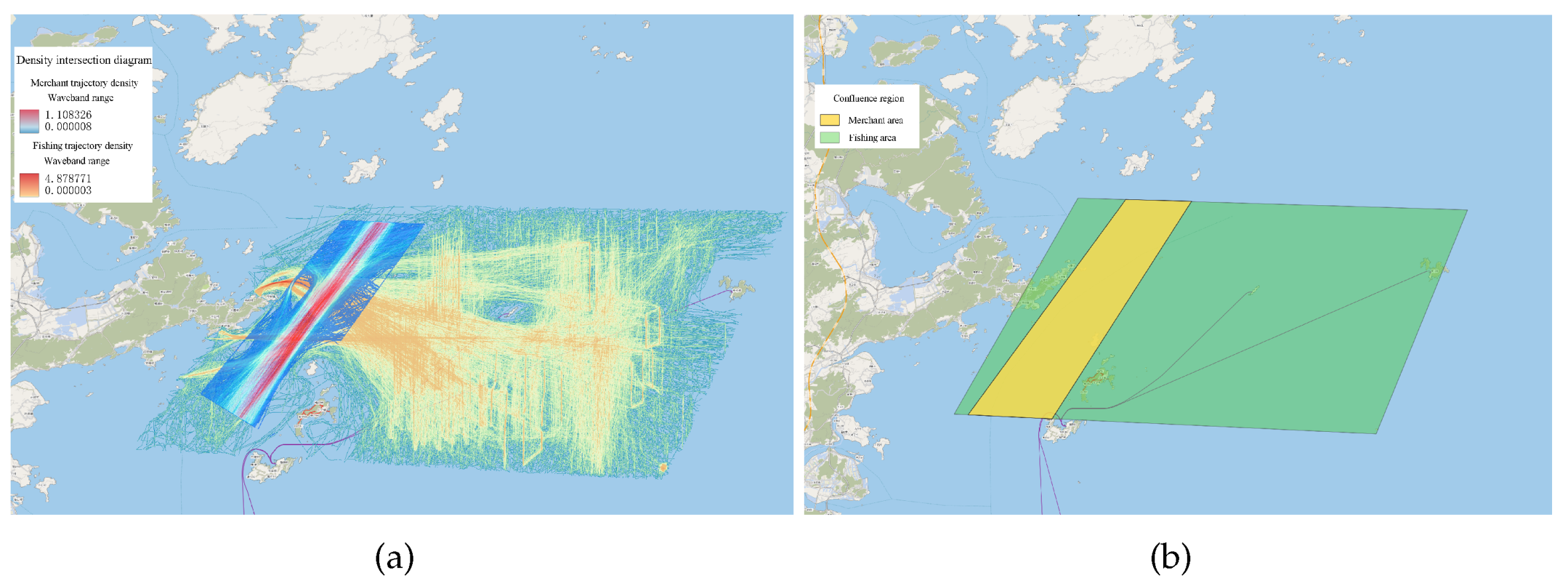
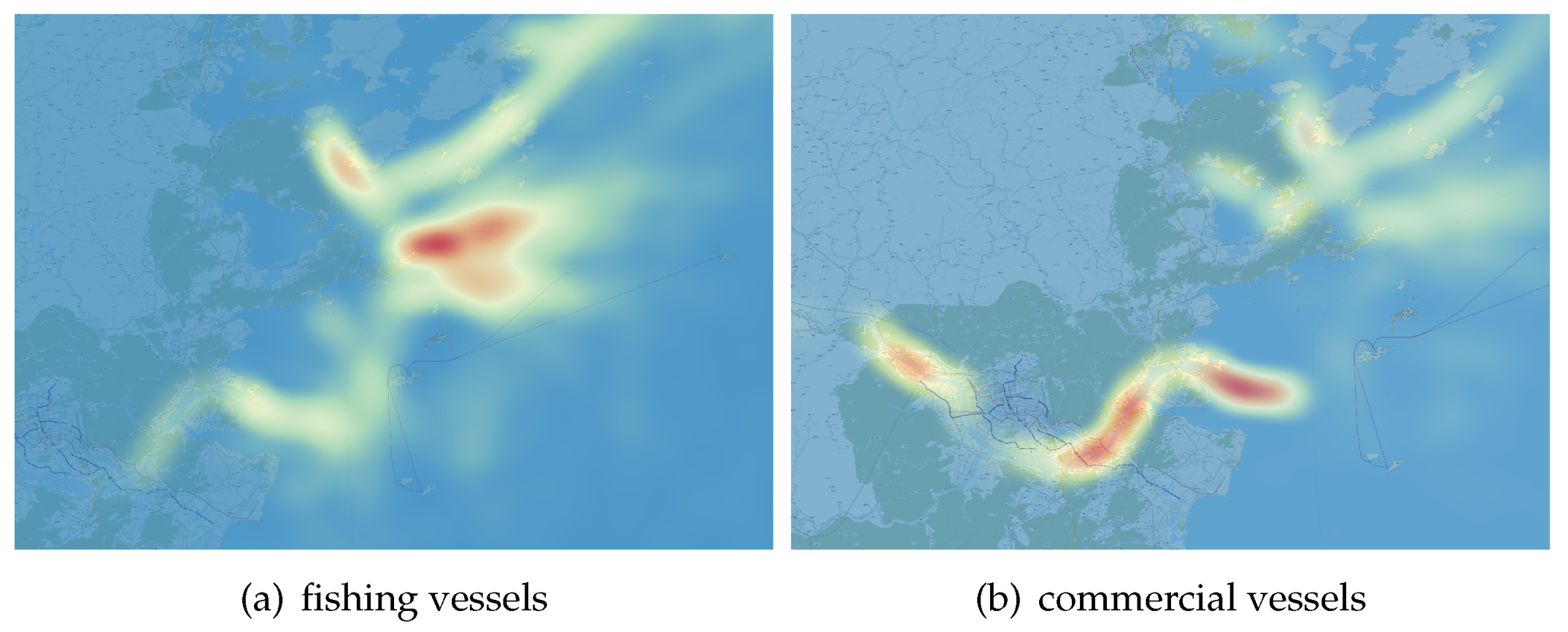
4.1.2. Analysis of High-Risk Areas of Collisions between Merchant Ships and Fishing Vessels
4.1.3. Comparison with Actual Collision Incidents
5. Conclusions
- Identification of fishing vessel operational status: The paper proposes a method to identify the operational status of fishing vessels. Recognizing the operational status of fishing vessels is crucial for collision prevention, particularly when encountering fishing vessels engaged in operations. The experiment distinguishes between the navigation trajectories of fishing vessels under different operational characteristics to effectively identify the operational statuses of fishing vessels, with a focus on those engaged in operations for encounter risk analysis.
- Evaluation of hazardous encounter events for merchant and fishing vessels: The paper introduces a method to assess encounter risk data for merchant and fishing vessels. By calculating the CPA and TCPA, the collision risk is quantified. The experiment sets the vessel domain for fishing vessels engaged in operations to 0.5 nautical miles, ensuring a safe distance of at least 0.5 nautical miles between each vessel in a collaborative operation. The paper categorizes and assesses risk data for different encounter situations.
- Visualization of high-risk collision areas for merchant and fishing vessels: The paper conducts a visual analysis of high-risk collision areas for merchant and fishing vessels in the research area under different encounter situations. The identified high-risk collision areas include the eastern nearshore waters of Lianjiang, with latitudes ranging from 26°17′56.40″ to 26°25′12″ and longitudes between 119°24′25.20″ and 119°48′7.20″, and the Minjiang River estuary. The paper validates the identified high-risk collision areas using data on the locations of maritime collisions in the research area over the past three years, demonstrating the reasonableness of the experiment’s outcomes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nieh, C.Y.; Lee, M.C.; Huang, J.C.; Kuo, H.C. Risk assessment and traffic behaviour evaluation of inbound ships in Keelung harbour based on AIS data. J. Mar. Sci. Technol. 2019, 27, 2. [Google Scholar]
- Liu, Z.; Zhang, B.; Zhang, M.; Wang, H.; Fu, X. A quantitative method for the analysis of ship collision risk using AIS data. Ocean Eng. 2023, 272, 113906. [Google Scholar] [CrossRef]
- Silveira, P.; Teixeira, A.; Soares, C.G. Use of AIS data to characterise marine traffic patterns and ship collision risk off the coast of Portugal. J. Navig. 2013, 66, 879–898. [Google Scholar] [CrossRef]
- Sedov, V.A.; Sedova, N.A.; Glushkov, S.V. The fuzzy model of ships collision risk rating in a heavy traffic zone. Vibroeng. Procedia 2016, 8, 453–458. [Google Scholar]
- Yi, M. Design of the model for predicting ship collision risk using fuzzy and DEVS. J. Korea Soc. Simul. 2016, 25, 127–135. [Google Scholar] [CrossRef]
- Chin, H.C.; Debnath, A.K. Modeling perceived collision risk in port water navigation. Saf. Sci. 2009, 47, 1410–1416. [Google Scholar] [CrossRef]
- Liu, K.; Yu, Q.; Yuan, Z.; Yang, Z.; Shu, Y. A systematic analysis for maritime accidents causation in Chinese coastal waters using machine learning approaches. Ocean Coast. Manag. 2021, 213, 105859. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, L.; Shu, Y.; Zhu, W. Evaluation model and management strategy for reducing pollution caused by ship collision in coastal waters. Ocean Coast. Manag. 2021, 203, 105446. [Google Scholar] [CrossRef]
- Shinoda, T.; Shimogawa, K.; Tamura, Y. Applied Bayesian Network Risk Assessment for Collision Accidents between Fishing Vessels and Cargo Vessels. J. Inst. Navig. 2012, 127, 165–174. [Google Scholar] [CrossRef]
- Takemoto, T.; Sakamoto, Y.; Yano, Y.; Furusho, M. Collision Avoidance Actions and Backgrounds in Fishing Vessels Collision Accidents. J. Jpn. Inst. Navig. 2010, 122, 113–120. [Google Scholar]
- Xiao, F.; Ma, Y.; Wu, B. Review of Probabilistic Risk Assessment Models for Ship Collisions with Structures. Appl. Sci. 2022, 12, 3441. [Google Scholar] [CrossRef]
- Mou, J.M.; Van der Tak, C.; Ligteringen, H. Study on collision avoidance in busy waterways by using AIS data. Ocean Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Uğurlu, F.; Yıldız, S.; Boran, M.; Uğurlu, Ö.; Wang, J. Analysis of fishing vessel accidents with Bayesian network and Chi-square methods. Ocean Eng. 2020, 198, 106956. [Google Scholar] [CrossRef]
- Argüelles, R.P.; Maza, J.A.G.; Martín, F.M.; Bartolomé, M. Ship-to-ship dialogues and agreements for collision risk reduction. J. Navig. 2021, 74, 1039–1056. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Negenborn, R.R.; Van Gelder, P. A ship collision avoidance system for human-machine cooperation during collision avoidance. Ocean Eng. 2020, 217, 107913. [Google Scholar] [CrossRef]
- Jung, C.H. A study on the requirement to the fishing vessel for reducing the collision accidents. J. Korean Soc. Mar. Environ. Saf. 2014, 20, 18–25. [Google Scholar] [CrossRef]
- Yang, J.; Sun, Y.; Song, Q.; Ma, L. Laws and preventive methods of collision accidents between merchant and fishing vessels in coastal area of China. Ocean Coast. Manag. 2023, 231, 106404. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, Z.; Liu, Y.; Song, H. Discussions about the best methods of collision between merchant ships and fishing boats during fishing seasons near chinese coast. In Proceedings of the International Conference on Computer Information Systems and Industrial Applications, Bangkok, Thailand, 28–29 June 2015; pp. 758–761. [Google Scholar]
- Obeng, F.; Domeh, V.; Khan, F.; Bose, N.; Sanli, E. Capsizing accident scenario model for small fishing trawler. Saf. Sci. 2022, 145, 105500. [Google Scholar] [CrossRef]
- Chou, C.C. Application of ANP to the selection of shipping registry: The case of Taiwanese maritime industry. Int. J. Ind. Ergon. 2018, 67, 89–97. [Google Scholar] [CrossRef]
- Seo, A.; Hida, T.; Nishiyama, M.; Nagao, K. Comparison and evaluation on user interface of small ship navigation support system. Proc. Jpn. Inst. Navig. 2018, 6, 1–4. [Google Scholar]
- Ma, F.; Chu, X.; Yan, X.; Liu, C. Error Distinguish of Ais Based on Evidence Combination. J. Theor. Appl. Inf. Technol. 2012, 45, 83–90. [Google Scholar]
- Ma, F.; Chu, X.; Liu, C. The error distinguishing of automatic identification system based on improved evidence similarity. In Proceedings of the ICTIS 2013: Improving Multimodal Transportation Systems-Information, Safety, and Integration, Wuhan, China, 29 June–2 July 2013; pp. 715–722. [Google Scholar]
- Qin, Z. The Study on Motion Control and Swarm Coordinated Planning for Unmanned Surface Vehicles (USV). Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2018. [Google Scholar]
- Fujii, Y.; Tanaka, K. Traffic capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]
- Kearon, J. Computer programs for collision avoidance and traffic keeping. In Proceedings of the Conference on Mathematical Aspects on Marine Traffic, London, UK, 15–16 September 1977; Academic Press: London, UK, 1979. [Google Scholar]
- Xu, X.; Geng, X.; Wen, Y. Modeling of ship collision risk index based on complex plane and its realization. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.Y.; Liu, J. Ship encounter azimuth map division based on automatic identification system data and support vector classification. Ocean Eng. 2020, 213, 107636. [Google Scholar] [CrossRef]
- Hasanspahić, N.; Vujičić, S.; Frančić, V.; Čampara, L. The role of the human factor in marine accidents. J. Mar. Sci. Eng. 2021, 9, 261. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Type | Range |
|---|---|---|
| Time | timestamp | 1 August 2022–1 December 2022 |
| Maritime Mobile Service Identity (MMSI) | string | 200,000,000–799,999,999 |
| Longitude | float | 0–180° |
| Latitude | float | 0–90° |
| Speed Over Ground (SOG) | float | 0–20 KN |
| Course Over Ground (COG) | float | 0–360° |
| True Heading | float | 0–360° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Lei, J.; Wang, Z.; Zheng, D.; Yu, C.; Chen, M.; He, W. Risk Analysis and Visualization of Merchant and Fishing Vessel Collisions in Coastal Waters: A Case Study of Fujian Coastal Area. J. Mar. Sci. Eng. 2024, 12, 681. https://doi.org/10.3390/jmse12040681
Zhu C, Lei J, Wang Z, Zheng D, Yu C, Chen M, He W. Risk Analysis and Visualization of Merchant and Fishing Vessel Collisions in Coastal Waters: A Case Study of Fujian Coastal Area. Journal of Marine Science and Engineering. 2024; 12(4):681. https://doi.org/10.3390/jmse12040681
Chicago/Turabian StyleZhu, Chuanguang, Jinyu Lei, Zhiyuan Wang, Decai Zheng, Chengqiang Yu, Mingzhong Chen, and Wei He. 2024. "Risk Analysis and Visualization of Merchant and Fishing Vessel Collisions in Coastal Waters: A Case Study of Fujian Coastal Area" Journal of Marine Science and Engineering 12, no. 4: 681. https://doi.org/10.3390/jmse12040681