1. Introduction
The harnessing of wind energy from deepwater sites is the next stage of the commercialisation of offshore wind. Several pilot-scale floating wind farms are already operational worldwide, with larger-scale deployments in planning. Floating Offshore Wind Turbines (FOWTs) are specifically engineered to harness higher wind speeds in deep waters, presenting unique challenges compared to fixed-bottom wind turbines. Numerous investigations focusing on the development of floating wind turbine designs, operation conditions and numerical analysis methodologies have been developing in recent years [
1]. A significant challenge involves the installation of these structures, typically accomplished by towing the FOWTs to their designated farm locations using large ocean-going vessels. The FOWT system is susceptible to various metocean factors, including wind, waves and currents, which significantly influence towing operations. As wind farms venture into deeper waters, environmental conditions generally become more extreme, amplifying the complexity of the marine operations necessary for installation, operation, maintenance and decommissioning. It is imperative to thoroughly investigate the impact of these environmental factors on an FOWT when planning the construction of large wind farms. This comprehensive understanding will facilitate the identification of optimal weather windows and enable more reliable year-round planning for floating wind farm construction.
The installation methodology employed varies, based on the type of floater utilised to support the wind turbine. FOWTs offer a distinctive opportunity for complete construction and assembly in sheltered waters or at quaysides. Irrespective of the floater type, the installation process necessitates a crucial marine operation—towing. Following construction, the primary challenge entails transporting the fully assembled FOWT system to the designated installation site, where it is connected to preinstalled mooring lines. This task is typically accomplished using towing tugs capable of towing the system from the quayside to the wind farm site. This marine operation poses notable challenges due to often adverse sea conditions, which may subject the turbine to significant loading due to platform motion.
Semi-submersible FOWTs, which can be fully constructed at quaysides and subsequently towed to the farm location, are a popular choice for platform technology developers. As these platforms are susceptible to significant wave-induced motion [
2], it is imperative to analyse the motion characteristics of fully assembled semi-submersible FOWTs under tow. This will allow an assessment of vessel requirements, turbine loading, weather windows, safety and ultimately the viability of towing these significant structures in deep waters, far from shore, where weather conditions can change rapidly. Given the sensitive nature of wind turbine structures to motion, maintaining acceptable values of motion and acceleration is essential to prevent damage to components and to maintain the high standards of Safety of Life at Sea (SOLAS).
It is worth noting that all the existing floating wind farms across the globe have utilised towing operations during their installation phases. The Windfloat Atlantic, Hywind Scotland, Kincardine and Hywind Tampen projects utilised towing vessels and operations during their construction [
3,
4]. Tow-to-port and tow-to-shallow operations are planned for major maintenance activities for Kincardine and Hywind Scotland wind farms, respectively [
5]. During a heavy maintenance campaign at the Kincardine wind farm, one of the platforms was detached from the mooring system and towed to a maintenance port and subsequently towed back to the wind farm location after necessary repairs [
6].
Thus, towing operations remain crucial for significant repairs and decommissioning processes also, reinforcing their status as one of the most vital marine operations throughout the entire life cycle of a floating wind farm.
Numerous factors influence the towing operation of an FOWT system. Some of these concern the motion that affects the survivability and course-keeping of the platform, whilst others deal with the forces and acceleration limits on the structure. These factors collectively ensure the secure, safe and efficient transit of the fully assembled FOWT system to its wind farm destination. Throughout the towing process, the platform contends with various metocean elements such as wind, waves and currents. It is important to avoid severe motion and acceleration and phenomena like fishtailing while towing. While FOWTs are engineered for stability at high draughts with mooring lines in place, the towing phase often necessitates the transportation of deballasted platforms at lower draughts and without the support of mooring lines. Consequently, dedicated research into platform motion during towing is imperative to facilitate safe towing operations.
Towing operations have been the subject of research in the context of Oil and Gas platforms over the past few decades, primarily during the exploration phase. Existing ocean towing practices are guided by established general rules and guidelines for marine operations [
2,
7,
8]. In recent years, there have been emerging efforts to analyse towing operations specific to FOWTs. A critical aspect contributing to the safety of towing operations is the stability of the platform during transit. While dedicated rules and guidelines for assessing the intact stability of FOWT systems are currently lacking, certain principles can be adapted from the extensively developed standards within the oil and gas industry, which have been in use for an extended period. Collu et al. [
9] conducted research in this area, proposing stability guidelines for fully assembled FOWTs during the transportation and installation phases. Furthermore, there has been a growing interest in investigating the motion dynamics of platforms during towing operations. Ding et al. [
10] conducted a numerical analysis of the towing operation involving a submerged Tension Leg Platform (TLP) wind turbine, employing a multi-body approach to examine the impact of environmental factors (e.g., wind and waves), bollard pull and towing point height on the towing process. Their study involved modelling and analysing a multi-body system comprising a tug, a towing line and an FOWT, encompassing various environmental conditions and identifying limiting factors. It showed that the platform exhibited stability up to significant wave heights of 5 m and wind speeds of 17 m/s while being towed at speeds of up to 2.8 m/s.
Buttner et al. [
11] conducted an experimental investigation to examine the towing process of the Orthospar platform while subjecting it to waves propagating from different directions. Concurrently, they assessed the loading experienced due to the towing line during these experiments. In a separate study, Mas-Soler et al. [
12] carried out experiments involving a Tension Leg Platform (TLP) to determine the platform’s towing characteristics across various towing configurations, both in calm waters and under diverse wave conditions. Le et al. [
13] analysed the towing performance of two submerged floating offshore wind turbines, evaluating platform motion under varying sea conditions. The study involved calculating maximum values for the heave, pitch and roll and using these to establish limits for towing these platforms based on significant wave height. Additionally, the study derived the bollard pull requirements for different towing scenarios. In another study, Hyland et al. [
14] conducted towing tests, assessing the drag prerequisites of the GICON TLP under various operational and towing conditions, and they observed Vortex-Induced Motion (VIM) while towing in calm water.
Many of the mentioned investigations focused on towing in specific metocean conditions, depending on the type of floater and installation sites. Previous experimental investigations outlined the observations and motion characteristics recorded during the experiments, but numerical analysis methodologies have rarely been mentioned. FOWTs are usually planned for farm-scale deployments with multiple repeated towing operations compared to the towing of an oil and gas floating platform, which is usually a one-off process. Finding the optimised towing speed and ascertaining the metocean limits is crucial to enabling safe, efficient and cost-effective towing operations [
3]. A comprehensive, systematic study focusing on various towing speeds and wave heights and their effects on FOWT motion and towing loads is lacking. This paper aims to fill this gap in knowledge, and it provides an ’industry-ready’ approach to understanding and analysing FOWT towing operations. It also aims to create an experimental database for studying semi-submersible towing operations and fuelling further research.
This paper presents and analyses an experimental investigation conducted to understand the towing characteristics of a semi-submersible platform under various conditions, including different speeds, physical configurations and wave conditions. The study placed particular emphasis on the hydrodynamic drag and motion that the platform exhibited during the towing operation. The motion was simulated numerically using two distinct approaches. In the first approach, the platform was represented as a body in motion at a small forward speed, and the motion was simulated using potential-flow-based approaches. This is an analysis methodology commonly used for the hydrodynamic analysis of ships moving with a small forward speed. The forward speed can have a considerable impact on the wave forces acting on a body, especially the second-order drift forces [
15]. Grue et al. [
16] studied this problem and found that a forward speed of 1 m/s can increase the drift forces by up to 50% compared to a body at zero speed. Later, Grue et al. [
17] extended the numerical approach to analysing bodies in waters of a restricted depth also. This paper presents a novel investigation into the applicability of this approach across a large range of speeds and wave heights, attempting to predict the dynamic response of a towed semi-submersible FOWT by incorporating quadratic damping coefficients, derived from decay tests, to accurately ascertain the impact of viscosity. The second approach involves modelling the platform under zero-speed conditions, with towing simulated by restraining the platform using towing lines and applying a current equivalent to the towing speed. Second-order drift forces play a major role here, and a similar problem was analysed by Emmerhoff et al. [
18] to understand the slow-drift motion of vertical cylinders moving with a low speed (or a slow current). An explicit solution for the analysis of a single cylinder was derived and extended to analyse a rectangular arrangement of cylinders. Negative damping was observed over frequency intervals in which the wave interactions were significant. Kinoshita et al. [
19] developed a semi-analytical solution to analyse cylindrical bodies oscillating in the presence of waves and a slight current. The effects of draughts and water depth were also studied. This solution worked well for cylinders moored to the sea bottom but was lacking while analysing freely oscillating cylinders. In the presented study, the motion was simulated using a hybrid approach, i.e., a combination of potential flow and Morison-equation-based methods. The obtained results were subjected to a comprehensive analysis, allowing for a comparative assessment of the advantages and disadvantages inherent to both methods.
While designing new floaters, it is crucial to investigate and establish installation methodologies that align with the specific requirements and operational demands of the floaters [
3]. If wet towing is imperative, the methodologies discussed in this paper offer designers and developers an opportunity to assess the seaworthiness and towability of forthcoming FOWTs, thereby enabling them to refine their decision-making process during the project’s initial phases itself. These methods are applicable to any floater design and can be employed to calculate the motion and towing loads of the platform, and depending on the availability of resources, a suitable method can be chosen. The paper stimulates further innovation and refinement in analysis techniques, including various non-linear phenomena, flexible platforms, additional limiting factors, etc., leading to improved methodologies in the future.
In
Section 2, the details of the experimental campaign are discussed. The geometric details of the platform, the model and the towing line are outlined in this section. The measurements, dimensions, speeds and numerical simulation results provided in the paper are presented at full-scale, and the corresponding model-scale values can be derived by applying the appropriate scaling factors.
Section 3 discusses the numerical approaches used for the calculations. The results obtained from the numerical simulations are validated against the experimental results. Some of these comparisons are shown in this section, and the rest are presented in Appendices
Appendix B and
Appendix C. Subsequently, the following section critically analyses and interprets the obtained results from the experiments and the numerical simulations presented in the previous section. In the following section, the major insights and informed conclusions from the presented study are presented The potential avenues for future research, highlighting areas where further exploration and investigation could enhance our understanding of the subject matter, are also discussed there.
4. Numerical Validation
Two distinct methods were employed to conduct a comparative analysis of the results. In the first method, the platform was presumed to be in forward motion at a speed equivalent to the platform’s towing speed. Utilising SEACAL [
31], in-house seakeeping software developed at MARIN, based on 3D potential flow methods, the platform’s motion was simulated in the frequency domain. An inherent challenge in this method lies in accurately determining the damping coefficients governing heave, roll and pitch motion, which is influenced by various types of nonlinearities. The precise calculation of these damping coefficients is crucial to accurately simulate this motion. The damping values were derived from the decay tests, which yielded damping values at the natural frequency. This value was then incorporated as additional damping, and simulations were executed to calculate the Response Amplitude Operators (RAOs).
In the second method, the platform was modelled in OrcaFlex [
32] as a stationary body (zero-speed), while a current matching the towing speed was imposed on the body. The platform was constrained using towing lines, and its motion in various wave conditions and current speeds was simulated. Firstly, the platform was modelled as a 3D panel mesh, and a frequency-domain hydrodynamic analysis was executed utilising Orcawave [
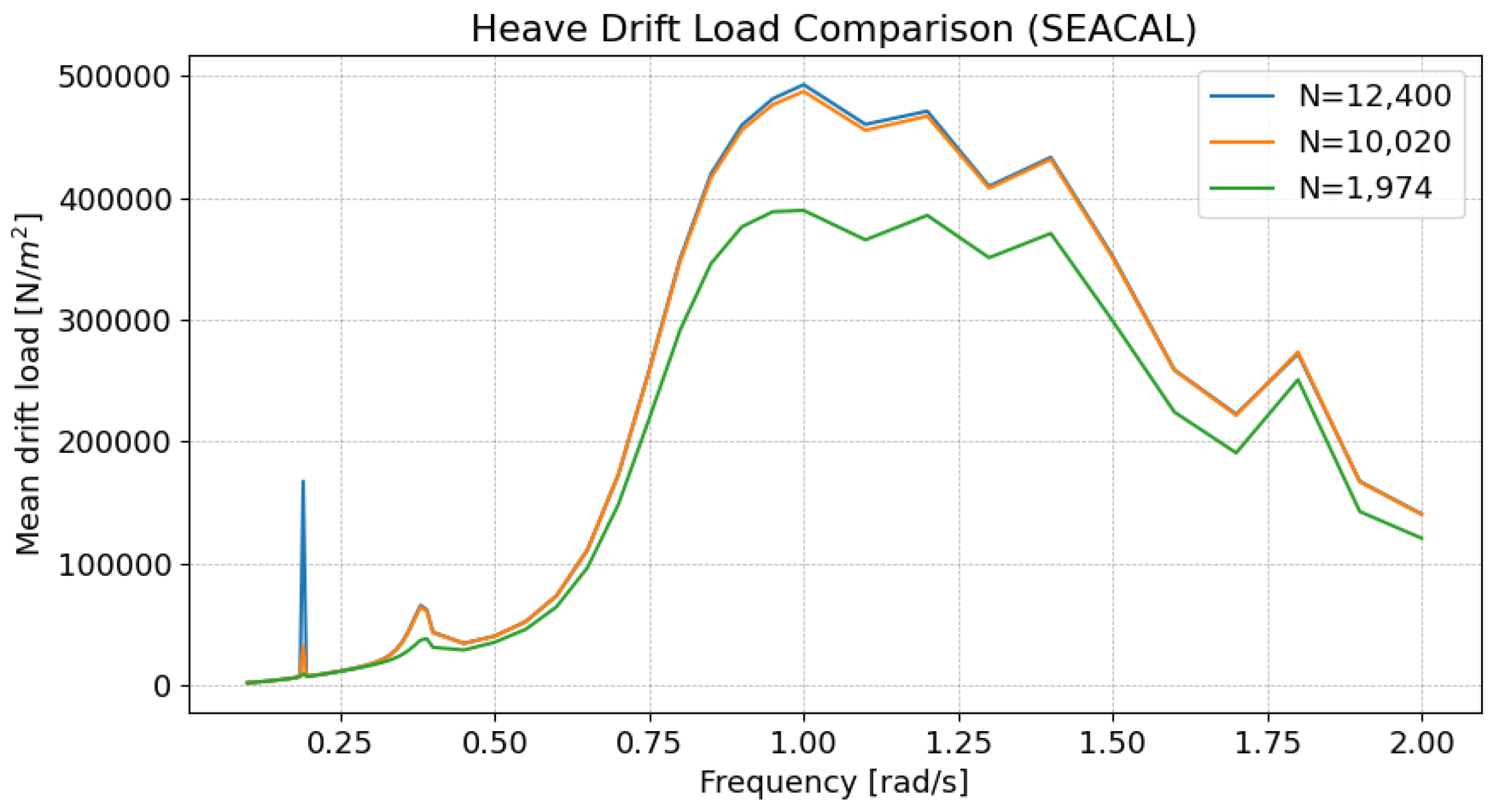
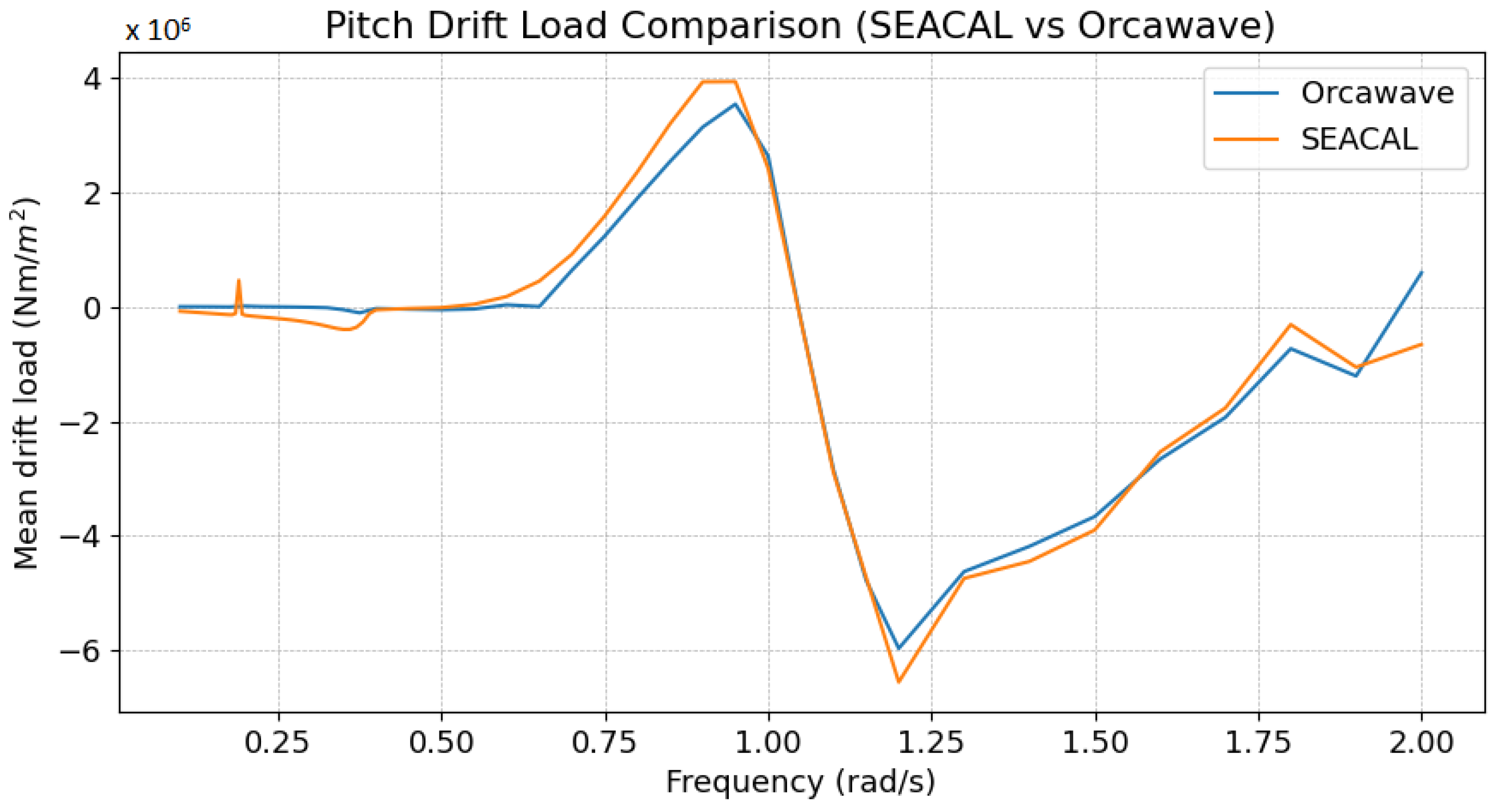
33]. The second-order drift forces play a major role in the motion of bodies moving with a slow speed (or small current velocities), and it is important to calculate them accurately. A mesh convergence study based on the second-order heave and pitch drift loads was performed, and it is presented in
Appendix A. No additional damping was used here for the frequency-domain analysis. Subsequently, this model and its associated hydrodynamic properties were imported into OrcaFlex for the purpose of performing time-domain simulations. The towing system modelling and following analyses were conducted within the OrcaFlex environment. To account for viscous effects, Morison elements were integrated into the model along the columns, braces and pontoons of the platform. The details of the Morison elements were obtained from the example cases provided by Orcina [
34], and they are listed in
Table 7. Only drag was considered while using the Morison elements in the version of OrcaFlex used for the analyses. In this approach, motion was simulated in the time domain, and RAOs were determined through subsequent analysis. The RAOs obtained from both calculations were then compared with the results obtained from the experiment, facilitating a comprehensive evaluation of the simulated and observed behaviours of the platform. The details of the numerical tools and the setup used for the simulations are outlined in
Appendix A.
SEACAL is based on zero-speed green functions with a correction for forward speed, depending on the encounter frequency. Low-speed approximations were used while modelling the hydrodynamic motion of the platform. It was assumed that the flow was uniform and equal to the platform’s speed everywhere around the platform. The radiated and diffracted waves were calculated independently of the forward speed; i.e., for all speeds, they were propagating in circles around the platform at zero speed. This method generally gives good predictions for small forward speeds (Fn < 0.25). However, a forward speed of 3.086 m/s (Fn = 0.284) was also investigated, given its slight Froude number proximity to 0.25, to explore the code’s performance at a higher speed. The low-speed approximations hold true only for low values (<0.25) of the Strouhal number (also known as the Brard number),
, determined via
=
U/g [
15,
35]. While modelling waves and the current together, Orcaflex employs the conventional super-positioning of waves and the current, and it does not take the wave–current interaction into consideration [
36]. The effect of the current on a structure is similar to the effect of the forward speed on a vessel [
16,
35], but in practice, this applies to conditions under which Strouhal numbers are sufficiently low (
< 0.25). This is a limiting condition that applies to both the methods employed in this study. A Strouhal number check was performed to ascertain the frequencies and forward speeds at which the limiting value was exceeded (
> 0.25). This threshold was surpassed when the encountering frequencies were greater than or equal to 1.2 rad/s, 1 rad/s and 0.8 rad/s for forward speeds of 2.056 m/s, 2.572 m/s and 3.082 m/s, respectively. This signifies that the simulation results using these methods may not be accurate for analysing these towing conditions. However, the results are presented from a curiosity perspective and to check how much they deviate from the experimental results.
4.1. Decay Tests
Decay tests play a vital role in discerning the natural frequencies and facilitating the computation of damping coefficients. In this context, specific decay tests were executed to ascertain the natural frequencies of heave, roll and pitch motion while simultaneously allowing for the calculation of damping coefficients required for the simulations. The damping values are quadratic in nature and are dependent on the motion amplitudes, and these values were calculated and are listed in
Table 8. These values were provided as an input for SEACAL, and the damping values at various motion amplitudes were interpolated via the software during the simulations.
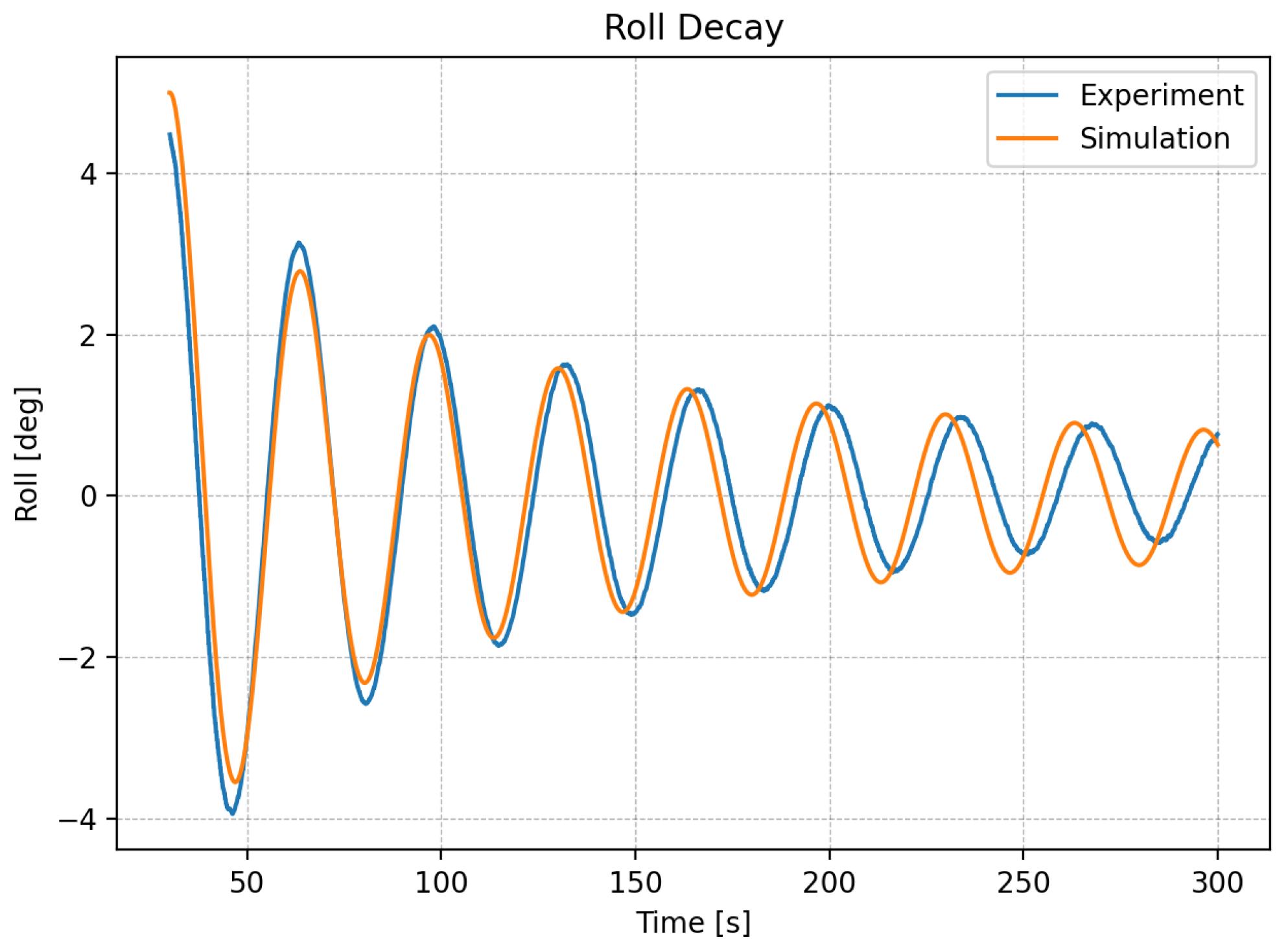
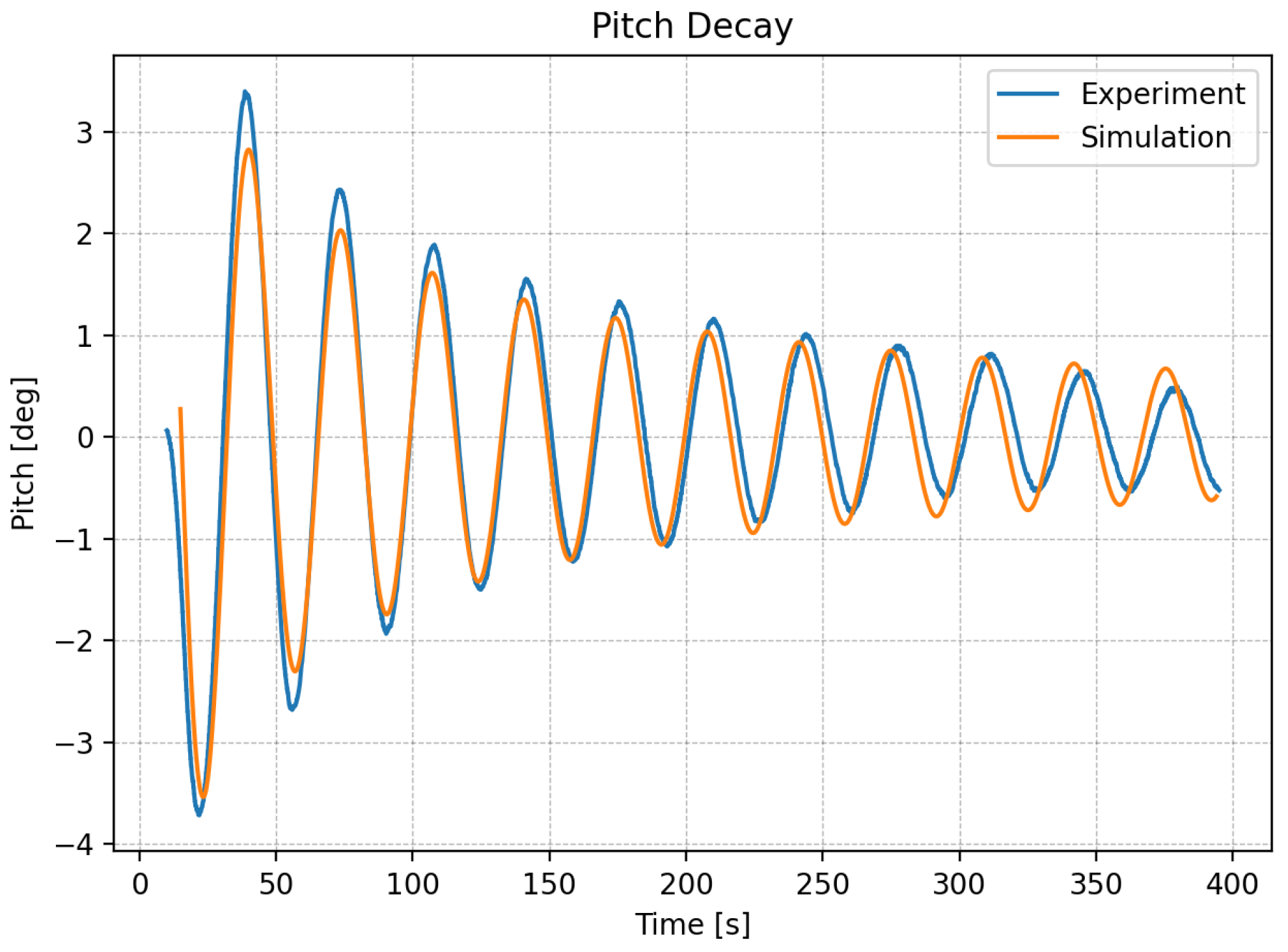
The decay tests themselves were simulated using OrcaFlex, with the resulting outcomes subjected to a thorough comparative analysis. The time-domain simulation results exhibited a strong alignment with the experimental findings for heave and pitch motion, though they marginally underestimated the results for roll motion (see
Appendix A,
Figure A7,
Figure A8 and
Figure A9). The natural frequencies were also derived from the RAO simulations performed using SEACAL. A comparative analysis of the natural periods, derived from both the experimental measurements and simulations, is presented in
Table 9.
4.2. Towing in Regular Waves
FOWTs are usually towed from ports which have calm sea conditions into more exposed open seas. Depending on the location of the wind farm, the sea conditions get harsher, and the FOWT system starts to encounter waves of varying physical properties. In order to quantify the maximum allowable limits, it is vital to understand the response of the FOWT system in regular waves. In this section, the response of the platform during towing operations under various wave conditions is studied. Its motion and the added resistance that the system encountered are the main focus.
4.2.1. Towing Forces and Added Resistance in Waves
It is crucial to calculate the total towing force required to tow the system in different wave systems in order to find the required bollard pull and a suitable tug for towing. One phenomenon is the added resistance in waves experienced by the floater in regular waves. Added resistance is a second-order phenomenon, and it contributes to the bollard pull requirements of tugs to tow a fully assembled platform in various sea conditions. Once the added resistance in waves is obtained for different wave conditions, the mean added resistance in an irregular seaway can be obtained using the following formula [
37]:
Here, e represents the wave encounter frequency, S(e) is the energy spectrum of the irregular sea, and is the wave amplitude.
The added resistance was calculated for various speeds from the experimental data by subtracting the mean towing force in calm water from the mean towing force in the wave system. Since the added resistance is proportional to the square of the wave amplitude, the obtained added resistance values were normalised by the square of the corresponding wave amplitude. The mean towing force and mean added resistance in waves were simulated using OrcaFlex and compared with the experiments in
Figure 11,
Figure 12 and
Figure 13. The mean added resistance in waves for various speeds is plotted against the
/L, where
is the wavelength and L is the length of the floater (see
Figure 11,
Figure 12 and
Figure 13).
4.2.2. Motion of the Platform
The primary motion of interest here was heave and pitch, with the roll motion observed to be negligible when towing against head waves. The same model employed to conduct decay tests was also utilised in the towing simulation. Additionally, the modelling process incorporated the towing lines, including the bridle configuration, within the OrcaFlex framework (
Figure 14). For wave modelling, the wave encounter frequency was utilised, while the effect of forward speed was introduced by applying a current matching the towing speed. This approach allowed for the calculation of the platform’s time-domain response in the presence of waves, with the simulation results subsequently subjected to validation against experimental data (see
Appendix C,
Figure A10,
Figure A11 and
Figure A12 for examples). The modelling of the bridle system was done while ensuring that the overall stiffness of the system equated to the stiffness of the spring. OrcaFlex was employed to compute the tension in the main towing line, consequently yielding the total towing force required to tow the system in various wave conditions directly. The RAOs were also calculated using SEACAL for comparison.
The time-domain comparison was performed as shown in
Appendix B. OrcaFlex was able to simulate the results with reasonable accuracy, and it agreed with the experimental results in most cases. The heave and pitch amplitude was calculated for all the test cases mentioned in
Table 4. The simulation results demonstrate a commendable alignment with the experimental data. The mean amplitude of the heave and pitch motion calculated from all the test cases was compared against the simulations (see
Figure 15,
Figure 16 and
Figure 17).
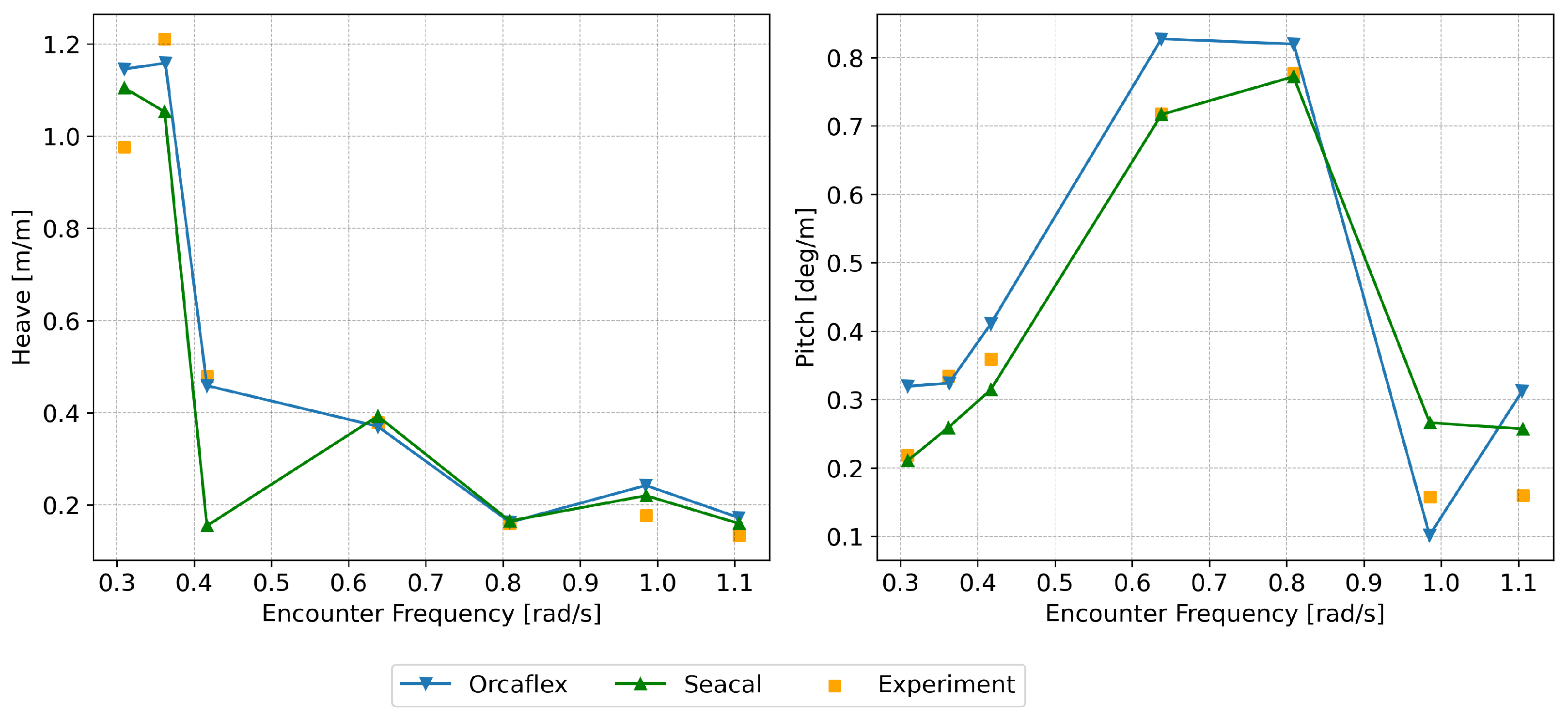
4.3. Towing in Irregular Waves
The platform was towed in the white-noise wave conditions shown in
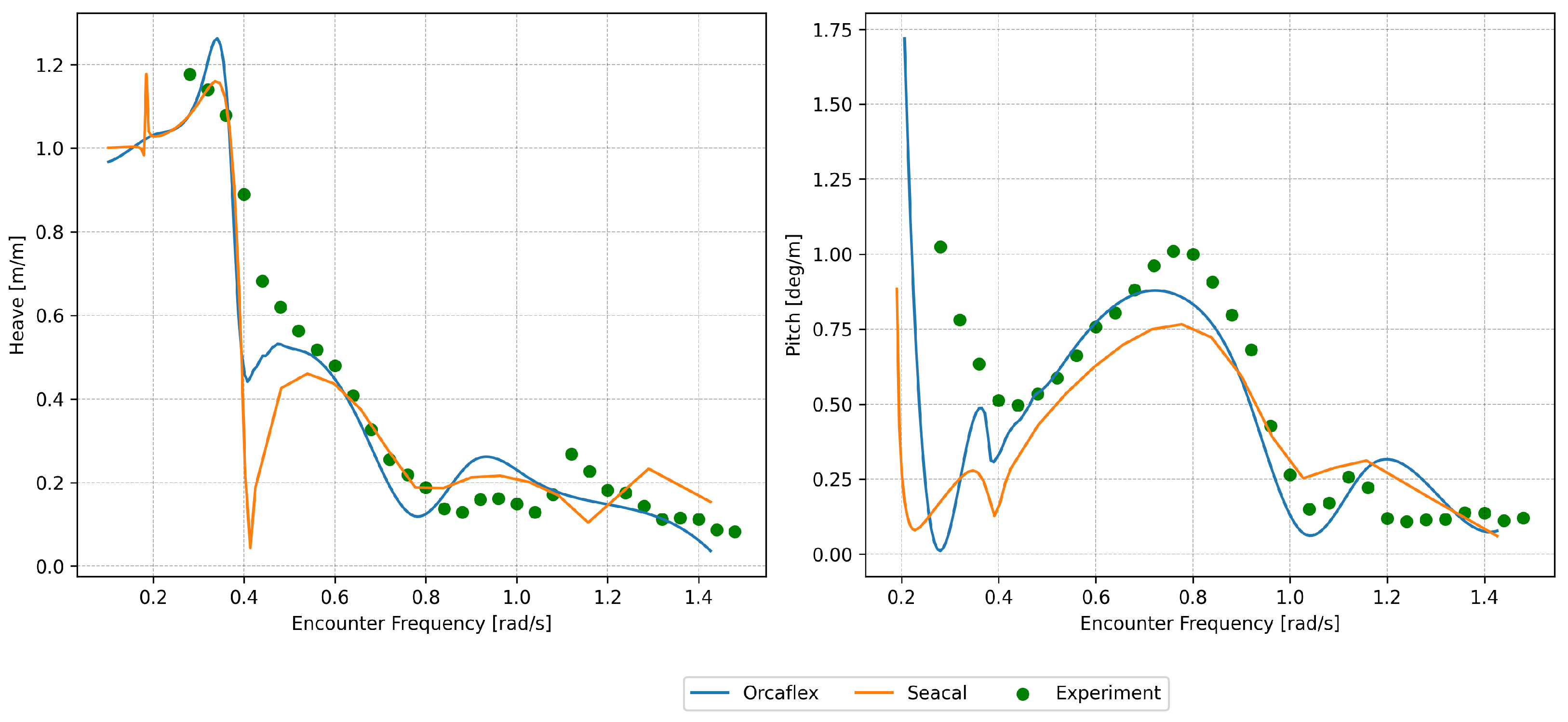
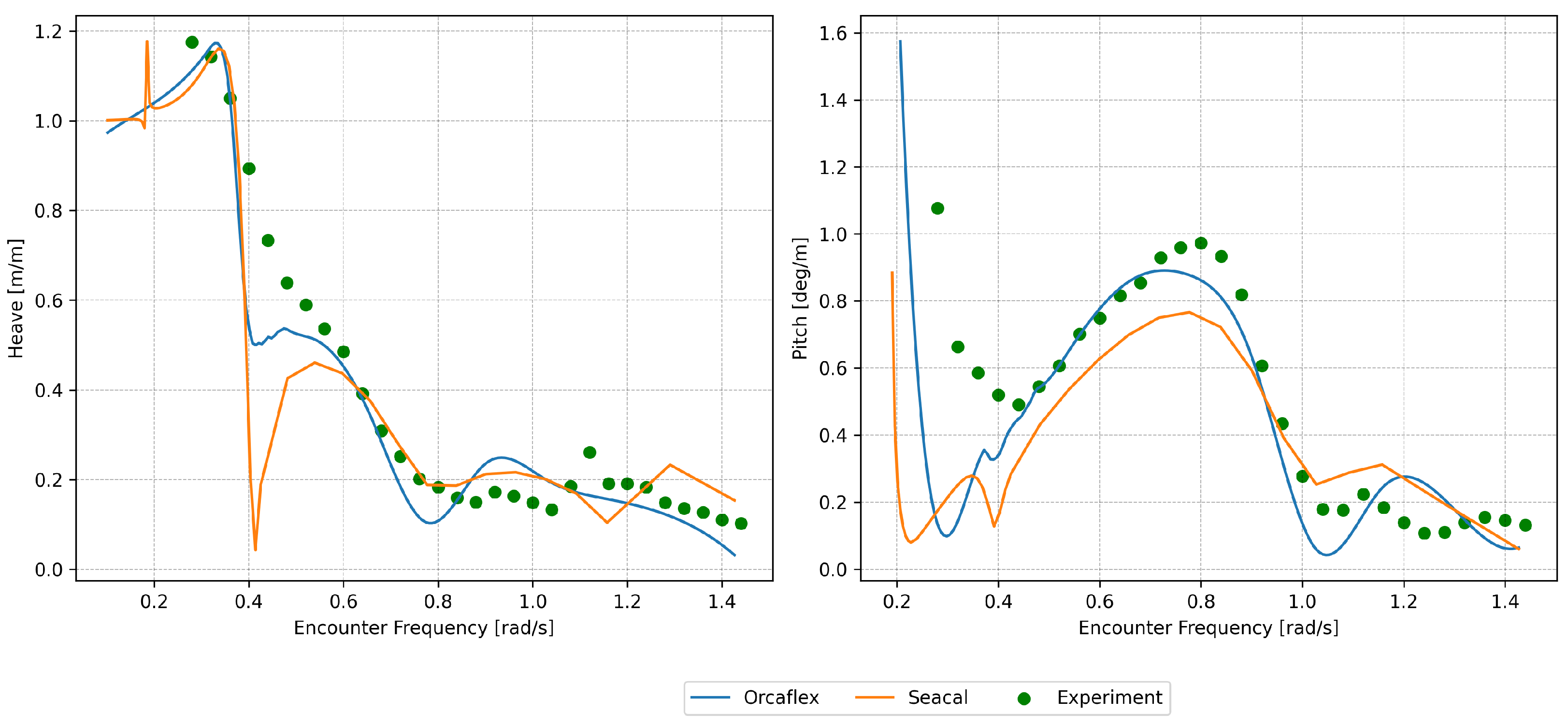
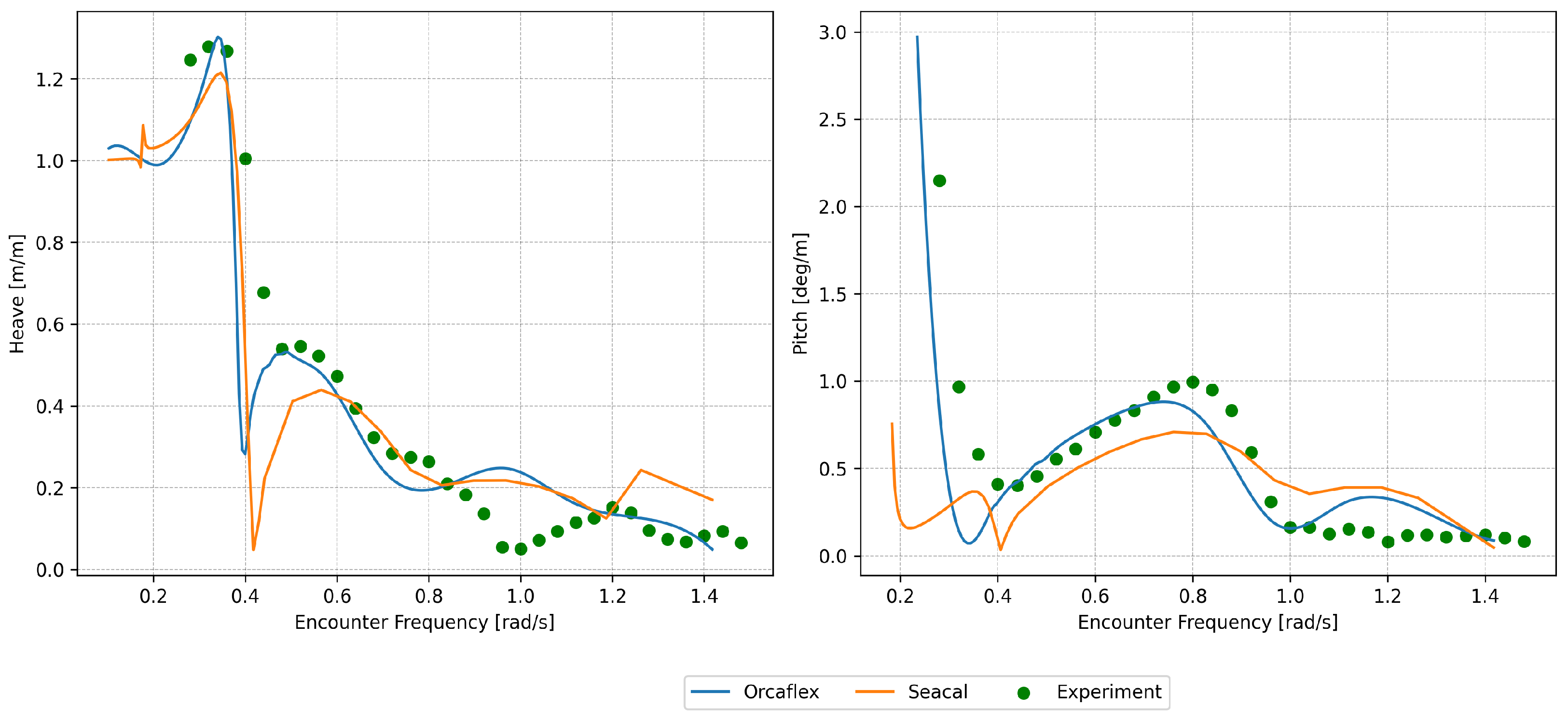
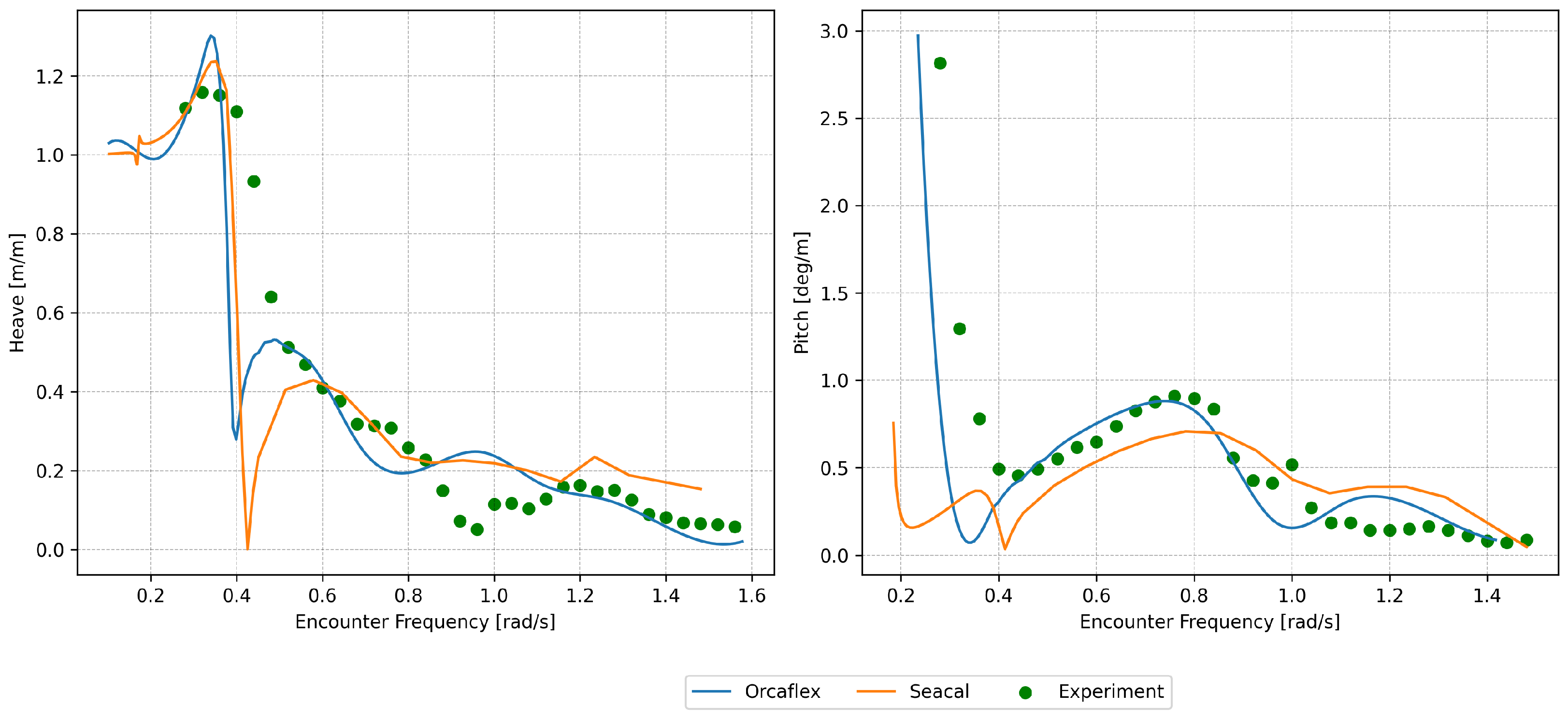
Table 5, and RAOs were calculated using spectral approaches. The RAOs were simulated using SEACAL at the tested towing speeds. These calculations incorporated the determined damping values to enhance the accuracy of the platform’s motion predictions. Using OrcaFlex, time-domain simulations were performed for numerous wave frequencies for all the tested regular wave conditions. From these simulations, the RAOs were obtained by calculating the amplitudes of the pitch and heave motion. Subsequently, RAOs for heave and pitch are graphically presented in the next section (
Figure 18,
Figure 19,
Figure 20 and
Figure 21 and
Appendix C). The outcomes from both approaches are plotted in
Appendix C, facilitating a comprehensive comparison between the two sets of results.
5. Discussion
This study presents a comprehensive towing analysis of a semi-submersible FOWT system with various wave conditions, towing speeds and towing configurations. Determining the ideal towing draught plays an important role when planning towing operations. The optimum towing draught is often set as a balancing point between the intact stability and hydrodynamic motion of the floating body. However, it is equally important to exercise caution and account for various non-linear phenomena like FIMs, green water shipping and wave run-ups on the columns, as observed in towing tests, while determining the towing draught.
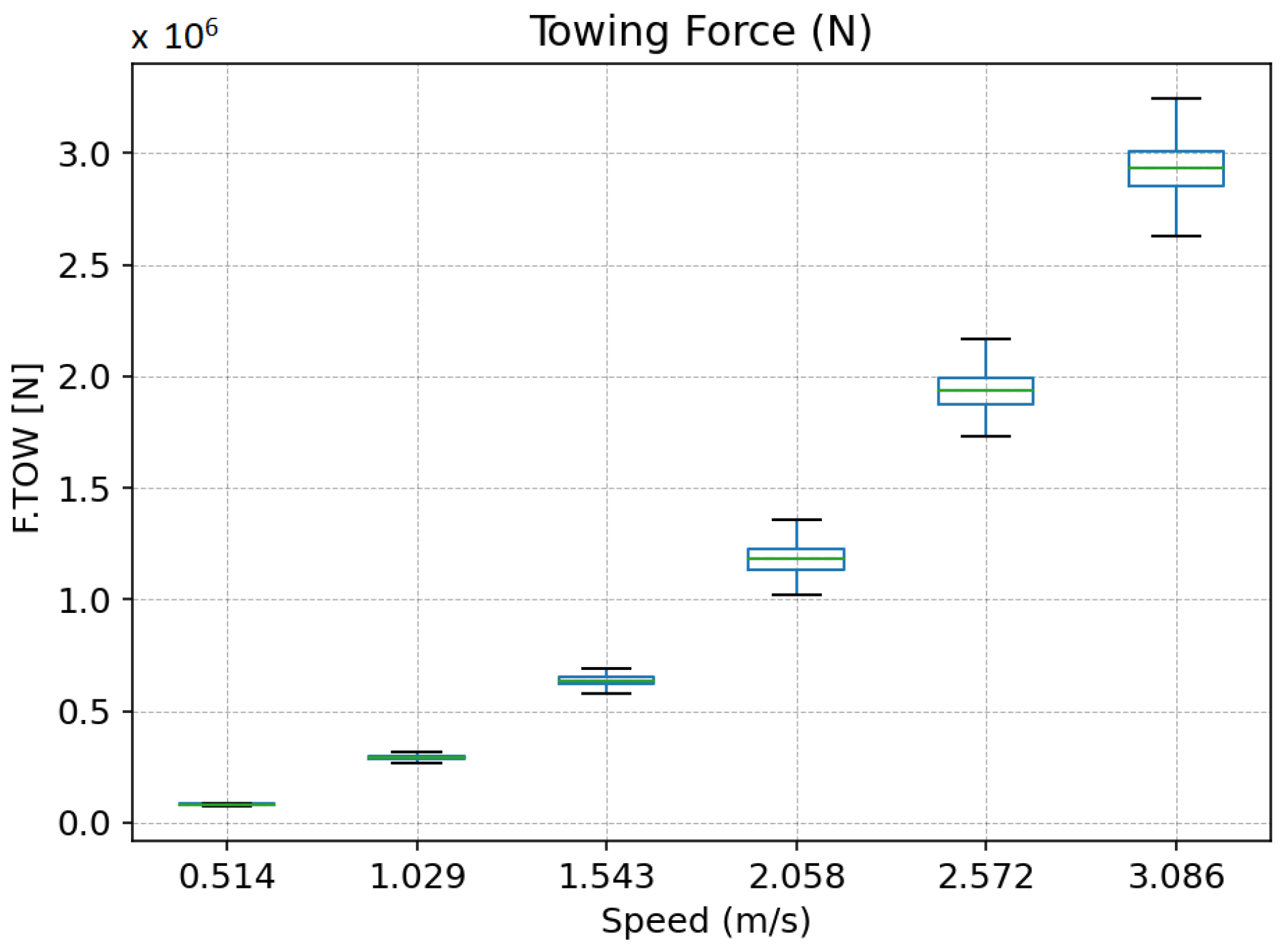
In
Figure 10, it can be observed that the drag on the platform varies quadratically with respect to the towing speed. This agrees with the observations from previous towing experiments using the INNWIND semi-submersible platform [
3]. This is important, as this value provides an idea about the towing in calm water or calm sea states. This plays an important role in calculating the bollard pull and the selection of the tugs for towing. Tug vessels with a maximum bollard pull of around 228 tons and 336 tons are required to tow the platform at 2.57 m/s (5 knots) and 3.09 m/s (6 knots), respectively. Some large tug vessels with bollard pulls of 300 tons exist but are rare [
25]. During a major repair campaign of the Kincardine wind farm, tug vessels with a bollard pull higher than 200 tons were chartered at record-high rates for over a decade [
6]. These elevated rates were due to the construction of the Hywind Tampen project, which was taking place at the same period in Norway. This signifies that, for towing at high speeds, vessels with high bollard pulls are required, which can have a direct impact on costs.
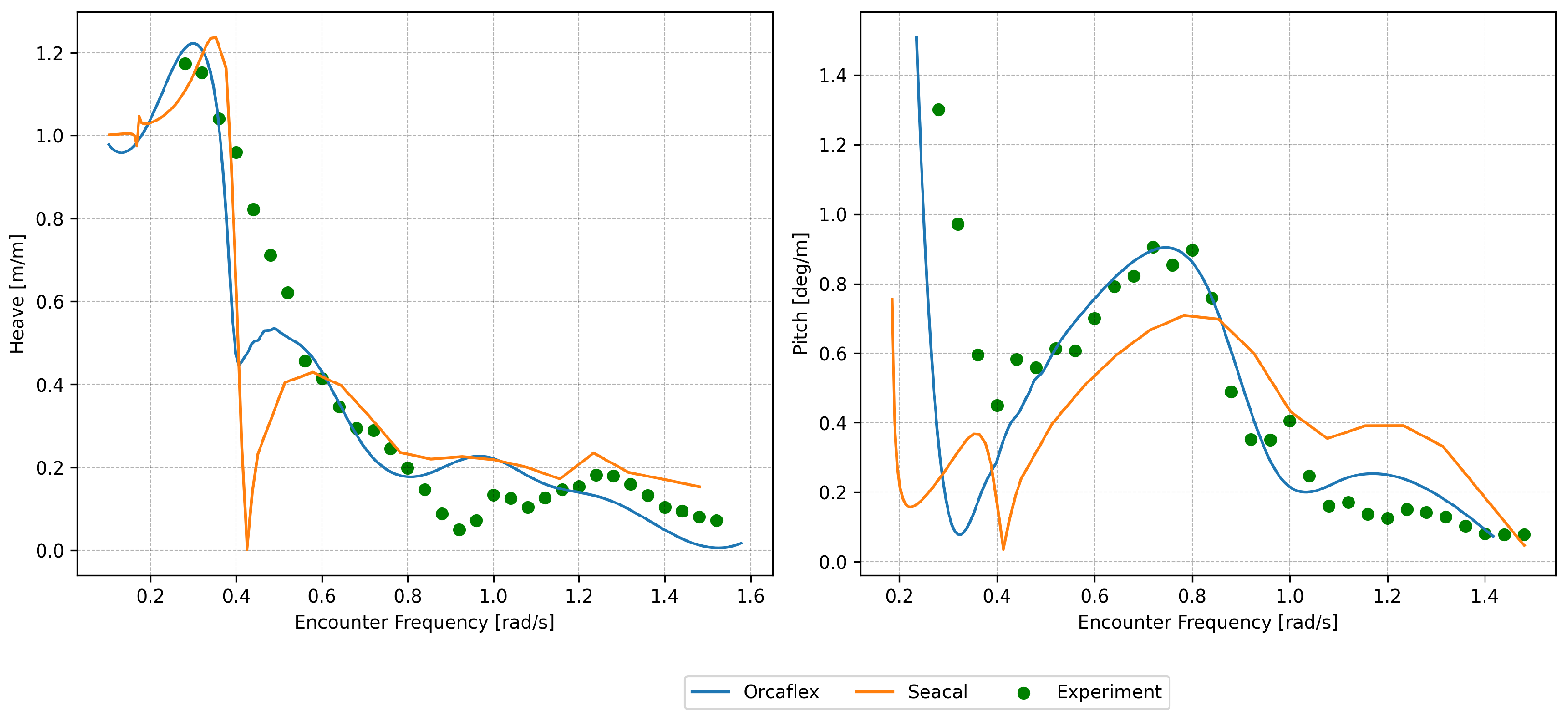
The precise prediction of the FOWT motion and towing loads in a seaway is a challenging task. Two numerical approaches were applied: a frequency-domain potential flow approach (SEACAL), including a slow forward speed and linearised damping, and a hybrid time-domain approach (OrcaFlex), employing potential-flow calculations and Morison elements to account for viscous effects. The hybrid approach slightly under-predicted the mean towing force but was able to predict it with a mean absolute percentage error of 5.9%, 8.4% and 9.5% for test cases with towing speeds of 1.029 m/s, 2.058 m/s and 2.572 m/s, respectively. The added resistance was not properly predicted, but a rough prediction was possible, and it requires further investigation to improve the predictions. The highest added resistance occurs when /L is close to 1, i.e., when the length of the encountering wave is equal to the length of the platform, and this was properly captured using the model.
The heave RAOs calculated using the hybrid approach are in good agreement with the experimental results for all significant wave heights (
Figure 18,
Figure 19,
Figure 20 and
Figure 21 and
Appendix C). In the case of pitch motion, the predictions are in good agreement with the experiments at a low significant wave height of 1 m but show deviation from the experimental results as the significant wave height increases. The deviation occurs at encounter frequencies (0.2–0.4 rad/s) close to the natural frequency of the pitch (0.18 rad/s) for which viscous effects dominate. This shows the presence of highly non-linear damping or other physical phenomena which cannot be predicted using potential-flow-based methods. At higher encounter frequencies (0.4–1.5 rad/s), the simulations are in good agreement with the experimental results. This method enables the modelling of different towing line configurations, encompassing both bridle and non-bridle setups, facilitating an analysis of the tension experienced by the main line, the bridle and the bridle legs. Even though reasonable predictions are possible, this method is very time-consuming and laborious, as it involves simulations of various combinations of different wave frequencies, wave heights and towing speeds in the time domain and their post-processing.
It can be observed that the simple potential-flow-based method with a correction for viscous effects is effective for low-speed (0.514–1.543 m/s) towing simulations. Heave RAOs were observed to be under-predicted at encounter frequencies close to the natural frequency of the heave (0.37 rad/s) in all test conditions. The prediction of the pitch was reasonable only in low speeds (0.514–1.543 m/s) with an error up to 35% for encounter frequencies higher than the natural frequency (0.4–1.5 rad/s) of the pitch (0.18 rad/s) (see
Appendix C,
Figure A13,
Figure A14,
Figure A15 and
Figure A16). As the towing speed increases, the pitch motion predictions deviate considerably from the experiments (see
Figure A17,
Figure A18,
Figure A19,
Figure A20,
Figure A21 and
Figure A22). This may occur due to the inaccuracy of the damping coefficient values used for the correction or other non-linear phenomena. With accurate calculations of damping coefficients for various speeds and wave heights, better simulations may be feasible, but it is a challenging task. This method is faster, as it involves the direct calculation of frequency-domain RAOs in a single simulation compared to the calculation of RAOs from the time-domain results using the previous method. At higher speeds (2.572 m/s and 3.086 m/s), the Strouhal number threshold is exceeded as the encounter frequency increases, and a deviation from the experimental results is observed. This is expected, and better numerical tools (e.g., the Rankine source method [
38]) are required to improve both heave and pitch predictions.
6. Conclusions and Further Work
Accurate predictions of the motion of an FOWT system hinge upon a thorough understanding and estimation of the various non-linearities inherent to the fluid dynamics concerning the platform motion. Among these factors, damping assumes a pivotal role, particularly in forecasting the pitch, roll and heave motion of the platform. The precise determination of damping coefficients is imperative to ensure the accuracy of system motion predictions. A hybrid approach, combining potential flow principles and the Morison equation, offers a reasonably accurate means of estimating platform motion. However, it is important to note that this method may not be fast, as it demands substantial time to simulate time-domain results and derive RAOs from them. When relying solely on potential flow methodologies, accurate damping calculations become crucial. This might be challenging, given the necessity of estimating damping across a range of frequencies and wave amplitudes—a task that can prove difficult to execute. Damping estimation at natural frequencies, as obtained from decay tests, can offer reliable predictions, particularly in scenarios where damping is primarily influenced due to viscous effects.
During the experiments, significant pitch and heave motion was observed, with the heave plates emerging from the water at specific wave frequencies near the natural frequencies of heave and pitch motion. This phenomenon is highly nonlinear, and its impact on the platform’s motion cannot be adequately analysed using potential-flow-based methods. Additionally, phenomena like vortex shedding can influence motion and warrant dedicated research. It was observed that the Reynolds number exceeded a value of 1 × 10
5 (see
Table 2 as the towing speed increased to 0.436 m/s (6 kn) and entered the sub-critical flow regime [
39] characterised by the slow transition of laminar vortices into turbulent vortex shedding. Similar phenomena are expected during towing in waves, affecting the platform’s motion and potentially contributing to the observed deviations between the OrcaFlex and SEACAL simulations and the experimental results under high-wave, high-speed and low-frequency conditions. Addressing these phenomena requires dedicated research using high-fidelity methods such as Computational Fluid Dynamics (CFD) or Smooth Particle Hydrodynamics (SPH). Investigations by Rongé et al. [
40] have demonstrated that CFD methods can provide better predictions of second-order and third-order wave loads compared to strip-theory methods and potential-flow methods. This could potentially enhance predictions of Response Amplitude Operators (RAOs) and towing loads, warranting further investigation. SEACAL can also use the Rankine source method to analyse higher towing speeds and improve the results (
> 0.25). This approach necessitates discretizing both the hull and the water surface to accurately calculate the waves generated from the floating body. However, it is computationally demanding and requires further optimisation to be applicable to the analysis of semi-submersible platforms.
In the presented study, the focus was solely on headseas. The emphasis was placed on heave and pitch motion, as well as the corresponding assessment of damping coefficients, which are of primary importance. However, in different heading conditions, roll motion can also become significant, necessitating the estimation of roll damping for precise motion predictions. It is safe to assume that roll predictions could also be possible using the approaches mentioned in the paper. The accuracy of these motion predictions is paramount due to the established motion limits during towing stipulated by classification societies. The estimation of viscous damping is crucial during numerical simulations because, in its absence, motion limits are surpassed even in calmer sea conditions, subsequently shrinking the available weather windows for towing operations.
Another important factor is the drag on the platform that influences the selection of tugs and towing lines for towing operations. In certain wave conditions, the added resistance in waves increases dramatically, hence the bollard pull requirement for towing. The mean added resistance in waves should be estimated before commencing towing operations. This also plays a role in the selection of towing ropes/cables. Towing using a bridle is advantageous over towing without a bridle, as it reduces the chances of fluid-induced motion.
The further assessment of non-linear effects such as VIM/fishtailing, galloping and pitch-induced wave run-up are some of the non-linear phenomena expected while towing, and some of them were observed during the towing tests. These phenomena will lead to downtime and should be avoided either via a better understanding or via mitigation. It requires dedicated research to understand their effects on the towing system and develop numerical models so that precautions can be taken to avoid them. The effects of wind and current on the parked turbine during transit should also be studied to understand and predict the motion and loads on the FOWT system. It is important to analyse the towing route using statistical approaches to perform voyage simulations in order to determine the operability (uptime/downtime) during wet towing.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










































