Preliminary Study on the Contribution of External Forces to Ship Behavior

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Material and Methods
2.1. TELEMAC-3D
2.2. TOMAWAC
2.2.1. Maneuvering Modeling Group (MMG Model)
2.2.2. Wind forces
2.2.3. Wave Forces
2.2.4. Rudder Forces
2.2.5. Forces Acting on the Hull
2.3. Numerical Experiments
2.4. Initial and Boundary Conditions
3. Calibration and Validation
4. Results and Discussions
5. Conclusions
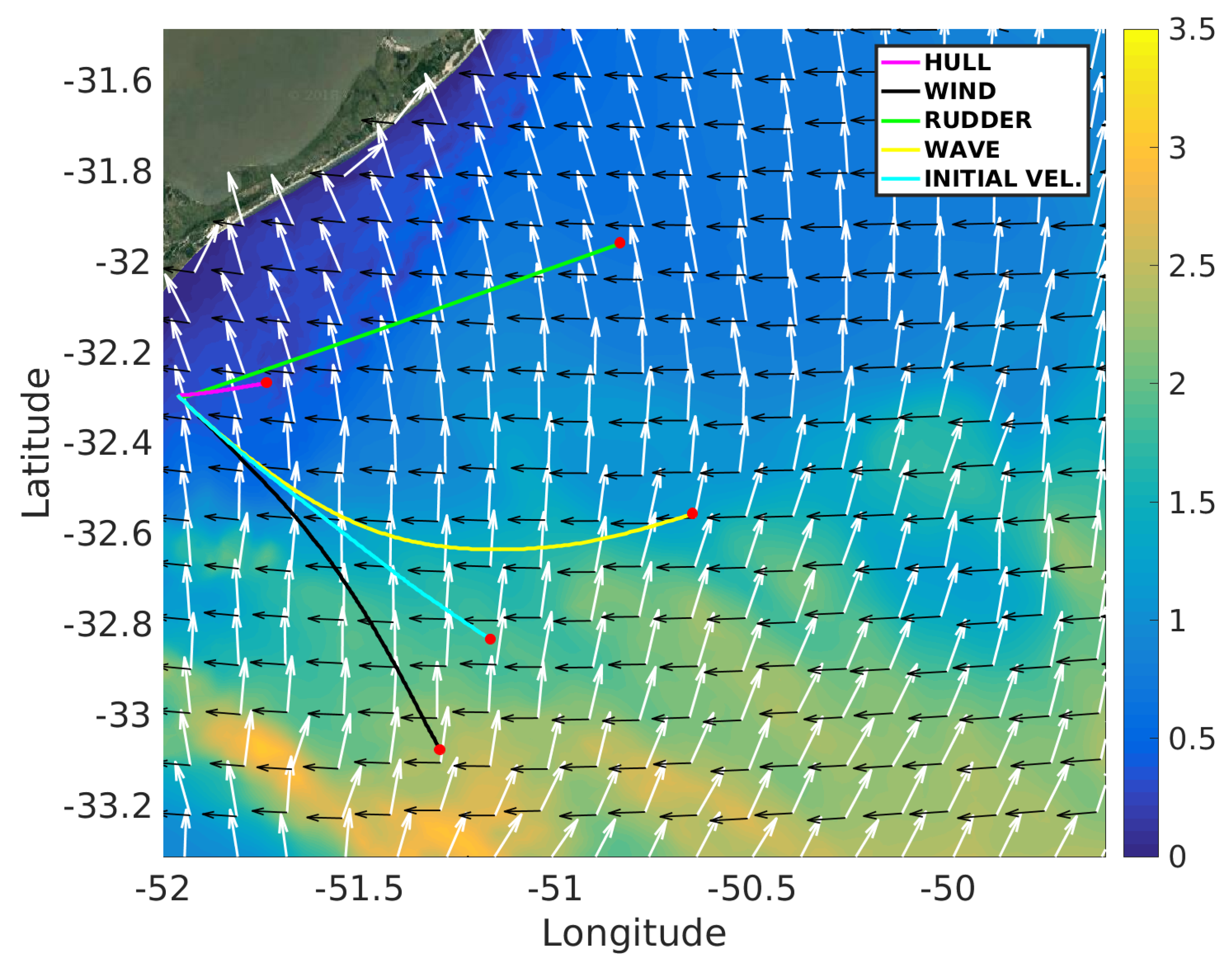
- The ship had its trajectory deflect to starboard due to East winds, showing that wind has an influence on the ship behavior during navigation;
- The ship had its trajectory deflect to port due to North waves; in this way the waves can influence, significantly, the ship’s route, mostly on the longer ones;
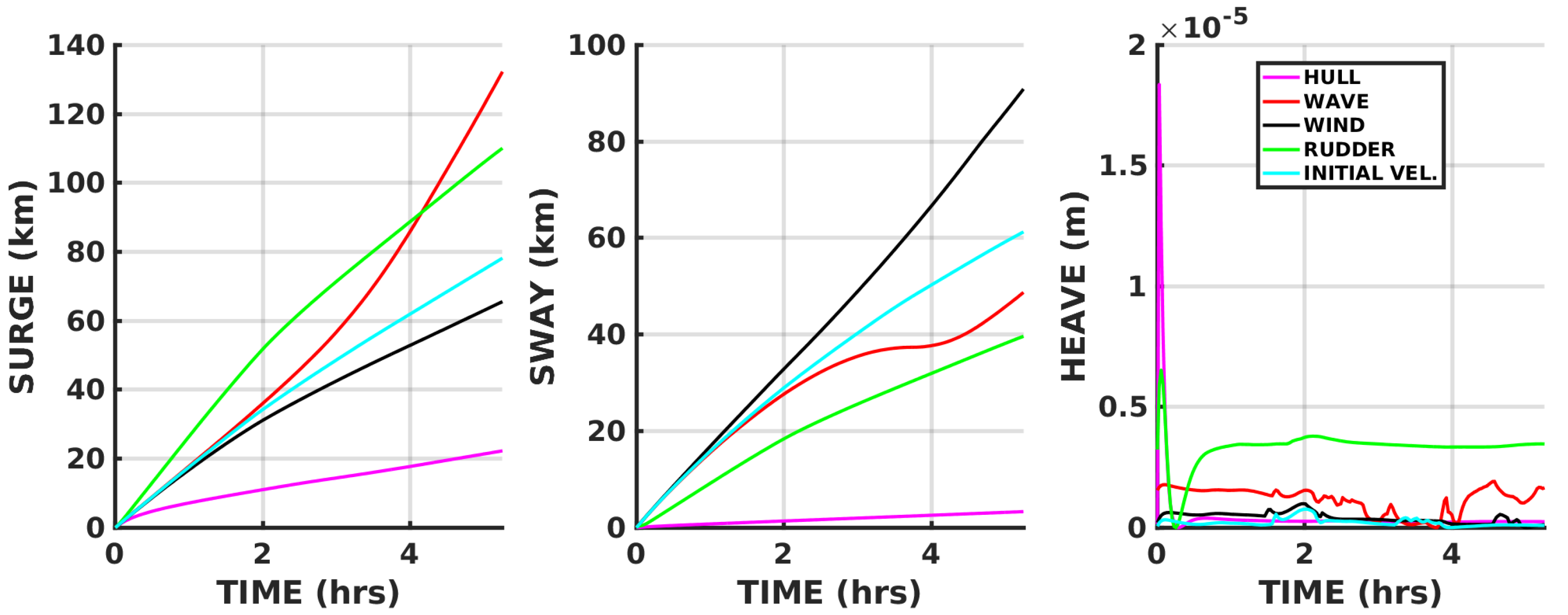
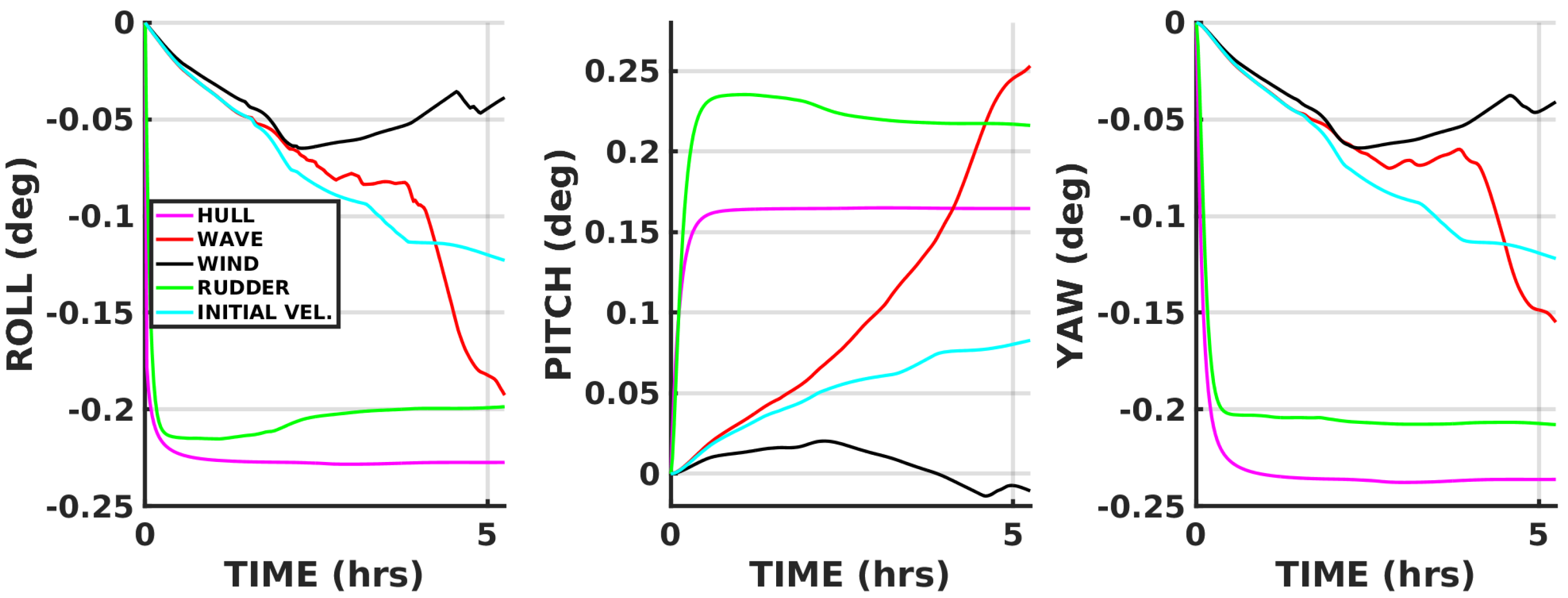
- The wind force has no major influences in the angles of angular movements, but it can influence the ship’s trajectory mainly in longer distances;
- The wave force can significantly deflect the vessel trajectory and it is able to affectthe angles of angular movements performed by a ship;
- The external forces classified as MMG Model can push the vessel or make its linear movements difficult, which depends on the relative angle between the vessel and the forces;
- The external force direction associated with high intensity of sea and wave height can deflect a ship’s trajectory or reduce its final displacement;
- The physical characteristics of a vessel, such as mass and geometric, form can influence the performance of a ship under severe scenarios;
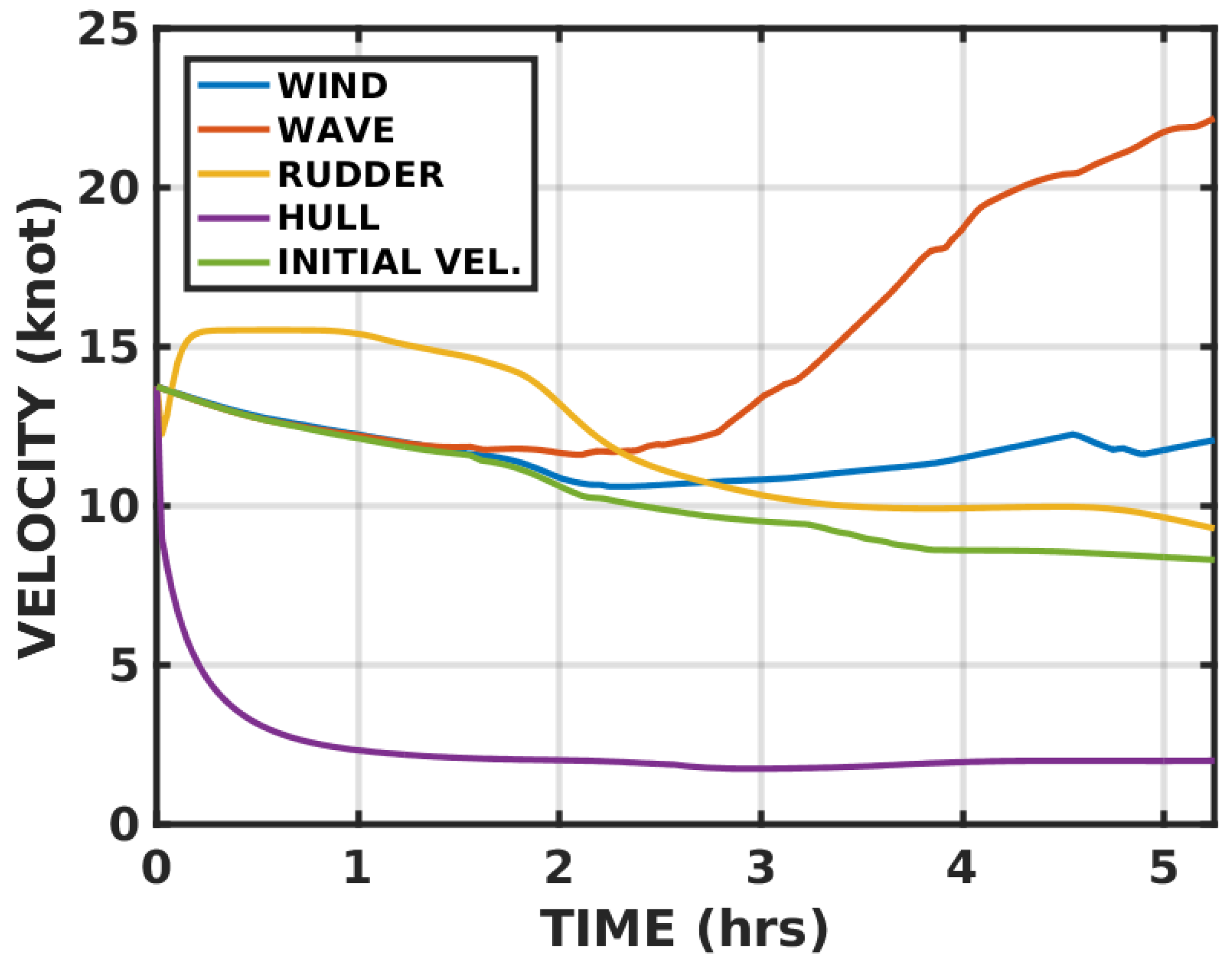
- The velocity of a ship can significantly influence the external force magnitude, which depends on the relative velocity, including the hull and rudder forces;
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| CESUP-UFRGS | Supercomputing Center of the Federal University of Rio Grande do Sul |
| CNPq | Conselho Nacional de Desenvolvimento Científico e Tecnológico |
| HYCOM | Hybrid Coordinate Ocean Model |
| IC | Index of Concordance |
| JTTC | Japanese Towing Tank Conference |
| LANSD | Laboratório de Análise Numérica e Sistemas Dinâmicos |
| LNCC | Laboratório Nacional de Computação Científica |
| MAE | Mean Average Error |
| MMG Model | Maneuvering Modeling Group |
| Mean value of the model data | |
| Standard deviation value of the model data | |
| MSE | Mean Square Error |
| NA | Not Applied |
| NOAA | (National Oceanic and Atmospheric Administration) |
| NCEP | National Centers for Environmental Prediction |
| NCAR | National Center for Atmospheric Research |
| Mean value of the observed data | |
| Standard deviation value of the observed data | |
| PNBOIA | Programa Nacional de Boias |
| RIOS | Research Initiative on Oceangoing Ships |
| RMSE | Root Mean Square Error |
| Pierson error coefficient | |
| SI | Scatter Index |
| SS | Mean Square Inclination |
| SHIPMOVE | SHIP MOVEMENT MODEL |
| TOMAWAC | TELEMAC-Based Operational Model Addressing Wave Action Computation |
References
- Sclavounos, P. On the Diffraction of Free Surface Waves by a Slender Ship. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1984. [Google Scholar]
- Froude, W. On the Rolling of Ships; Royal Institution of Naval Architects: London, UK, 1862; p. 95. [Google Scholar]
- Michell, J.H. Wave–Resistance of a Ship. Philos. Mag. 1898, 45, 106–123. [Google Scholar] [CrossRef]
- Maruo, H. Calculation of the Wave Resistance of Ships, the Draught of Which is as Small as the Beam. J. Zosen Kiokai 1962, 1962, 21–37. [Google Scholar] [CrossRef] [Green Version]
- Newman, J.N. A slender-body theory for ship oscillations in waves. J. Fluid Mech. 1964, 18, 602–618. [Google Scholar] [CrossRef]
- Newman, J.N.; Sclavounos, P. The Unified Theory of Ship Motions. In Proceedings of the Symposium on 13th Naval Hydrodynamics, Tokyo, Janpan, 6–10 October 1980. [Google Scholar]
- Moreno, C.A. Interferência Hidrodinâmica no Comportamento em ondas Entre Navios com Velocidade de Avanço. Ph.D. Thesis, Coordenação de Aperfeiçoamento de Pessoal de Nível Superior, Brasília, Brazil, 2010. [Google Scholar]
- Yasukawa, H.; Yoshimura, Y. Introduction of MMG standard method for ship maneuvering predictions. J. Mar. Sci. Technol. (Jpn.) 2015, 20, 37–52. [Google Scholar] [CrossRef]
- Ogawa, A.; Kasai, H. On the mathematical model of manoeuvring motion of ships. Int. Shipbuild. Prog. 1978, 25, 306–319. [Google Scholar] [CrossRef]
- Inoue, S.; Hirano, M.; Kijima, K.; Takashina, J. Practical calculation method of ship maneuvering motion. Int. Shipbuild. Prog. 1981, 28, 207–222. [Google Scholar] [CrossRef]
- Armudi, A.; Marques, W.; Oleinik, P. Analysis of ship behavior under influence of waves and currents. Revista de Engenharia Térmica 2017, 16, 18–26. [Google Scholar] [CrossRef]
- Hervouet, J.; Van Haren, L. Recent advances in numerical methods for fluid flow. In Floodplain Processes; Anderson, M.G., Walling, D.E., Bates, P.D., Eds.; Wiley: New York, NY, USA, 1996; pp. 183–214. [Google Scholar]
- Hervouet, J.M. Free Surface Flows: Modelling With the Finite Element Methods; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Millero, F.J.; Poisson, A. International one-atmosphere equation of state of seawater. Deep Sea Res. Part A Oceanogr. Res. Pap. 1981, 28, 625–629. [Google Scholar] [CrossRef]
- TOMAWAC. TOMAWAC Technical Report—Software for Sea State Modelling on Unstructured Grids over Oceans and Coastal Seas; Technical Report; EDF: Chateau, France, 2011. [Google Scholar]
- Lee, S.D.; Yu, C.H.; Hsiu, K.Y.; Hsieh, Y.F.; Tzeng, C.Y.; Kehr, Y.Z. Design and experiment of a small boat track-keeping autopilot. Ocean Eng. 2010, 37, 208–217. [Google Scholar] [CrossRef]
- Maimun, A.; Priyanto, A.; Rahimuddin; Sian, A.Y.; Awal, Z.I.; Celement, C.S.; Nurcholis; Waqiyuddin, M. A mathematical model on manoeuvrability of a LNG tanker in vicinity of bank in restricted water. Saf. Sci. 2013, 53, 34–44. [Google Scholar] [CrossRef]
- Andersen, I.M.V. Wind loads on post-panamax container ship. Ocean Eng. 2013, 58, 115–134. [Google Scholar] [CrossRef]
- Chen, C.; Shiotani, S.; Sasa, K. Numerical ship navigation based on weather and ocean simulation. Ocean Eng. 2013, 69, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Zou, Z.J.; Deng, D.H. A study on prediction of ship maneuvering in regular waves. Ocean Eng. 2017, 137, 367–381. [Google Scholar] [CrossRef]
- Willmot, C.J. Some Comments on the Evaluation of Model Performance. Bull. Am. Meteorol. Soc. 1982, 63, 1309–1313. [Google Scholar] [CrossRef] [Green Version]
- Janssen, P.A.E.M.; Hansen, B.; Bidlot, J.R. Verification of the ECMWF Wave Forecasting System against Buoy and Altimeter Data. Am. Meteorol. Soc. 1997, 12, 763–784. [Google Scholar] [CrossRef]
- Lalbeharry, R. Evaluation of the CMC regional wave forecasting system against buoy data. Atmosphere-Ocean 2002, 40, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Chawla, A.; Spindler, D.M.; Tolman, H.L. Validation of a thirty year wave hindcast using the Climate Forecast System Reanalysis winds. Ocean Model. 2013, 70, 189–206. [Google Scholar] [CrossRef]
- Teegavarapu, R.S.V. Floods in a Changing Climate: Extreme Precipitation; Cambridge University Press: Cambridge, UK, 2013; p. 268. [Google Scholar]
- Edwards, E.; Cradden, L.; Ingram, D.; Kalogeri, C. Verification within wave resource assessments. Part 1: Statistical analysis. Int. J. Mar. Energy 2014, 8, 50–69. [Google Scholar] [CrossRef] [Green Version]
- Khandekar, M. Operational Wave Models. In Guide to Wave Analysis and Forecasting, 2nd ed.; World Meteorological Association: Geneva, Switzerland, 1998; Chapter 6; pp. 67–80. [Google Scholar]
- Bidlot, J.R.; Holmes, D.J.; Whittmann, P.A.; Lalbeharry, R.; Chen, H.S. Intercomparison of the Performance of Operational Ocean Wave Forecasting Systems with Buoy Data. Am. Meteorol. Soc. 2002, 17. [Google Scholar] [CrossRef]
- Cha, R.; Wan, D. Numerical investigation of motion response of two model ships in regular waves. Procedia Eng. 2015, 116, 20–31. [Google Scholar] [CrossRef]
- Chuang, Z.; Steen, S. Speed loss of a vessel sailing in oblique waves. Ocean Eng. 2013, 64, 88–99. [Google Scholar] [CrossRef]
- Bennett, S.; Hudson, D.; Temarel, P. The influend of forward speed on ship motions in abnormal waves: Experimental measurements and numerical predictions. J. Fluids Struct. 2013, 39, 154–172. [Google Scholar] [CrossRef]
- Ozdemir, Y.; Barlas, B. Numerical study of ship motions and added resistance in regular incident waves of KVLCC2 model. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 149–159. [Google Scholar] [CrossRef] [Green Version]
- Papanikolaou, A.; Alfred Mohammed, E. Stochastic uncertainty modelling for ship design loads and operational guidance. Ocean Eng. 2014, 86, 47–57. [Google Scholar] [CrossRef]
- Papanikolaou, A.; Fournarakis, N.; Chroni, D.; Liu, S.; Plessas, T. Simulation of the Maneuvering Behavior of Ships in Adverse Weather Conditions. In Proceedings of the 31st Symposium on Naval Hydrodynamics, Monterey, CA, USA, 16 September 2016. [Google Scholar]
| 1. | |
| 2. | |
| 3. | |
| 4. | |
| 5. | |
| 6. | |
| 7. | |
| 8. |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass (kg) | Length (m) | Width (m) | Draught (m) |
|---|---|---|---|
| 173 | 32 | 12 |
| Int | |||
|---|---|---|---|
| 1.97 | 9.85 | 0.26 | |
| 1.75 | 9.10 | 0.18 | |
| 0.70 | 2.53 | 0.14 | |
| 0.67 | 1.40 | 0.10 | |
| RMSE | 0.57 | NA | 0.16 |
| MAE | 0.43 | NA | 0.13 |
| IC | 0.70 | NA | 0.86 |
| MSE | 0.33 | NA | 0.02 |
| Bias | 0.22 | 0.74 | 0.07 |
| SI (%) | 33 | 23 | NA |
| SS | 1.12 | 1.10 | NA |
| 0.70 | 0.65 | NA |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
da Silva, A.S.; Oleinik, P.H.; de Paula Kirinus, E.; Costi, J.; Guimarães, R.C.; Pavlovic, A.; Marques, W.C. Preliminary Study on the Contribution of External Forces to Ship Behavior. J. Mar. Sci. Eng. 2019, 7, 72. https://doi.org/10.3390/jmse7030072
da Silva AS, Oleinik PH, de Paula Kirinus E, Costi J, Guimarães RC, Pavlovic A, Marques WC. Preliminary Study on the Contribution of External Forces to Ship Behavior. Journal of Marine Science and Engineering. 2019; 7(3):72. https://doi.org/10.3390/jmse7030072
Chicago/Turabian Styleda Silva, Augusto Silva, Phelype Haron Oleinik, Eduardo de Paula Kirinus, Juliana Costi, Ricardo Cardoso Guimarães, Ana Pavlovic, and Wiliam Correa Marques. 2019. "Preliminary Study on the Contribution of External Forces to Ship Behavior" Journal of Marine Science and Engineering 7, no. 3: 72. https://doi.org/10.3390/jmse7030072