Data-Aided and Non-Data-Aided SNR Estimators for CPM Signals in Ka-Band Satellite Communications

Abstract
:1. Introduction
2. Channel Model of Ka-Band Satellite Communication
2.1. Attenuation Factor
2.2. Statistical Channel Model of Ka-Band Satellite Communication
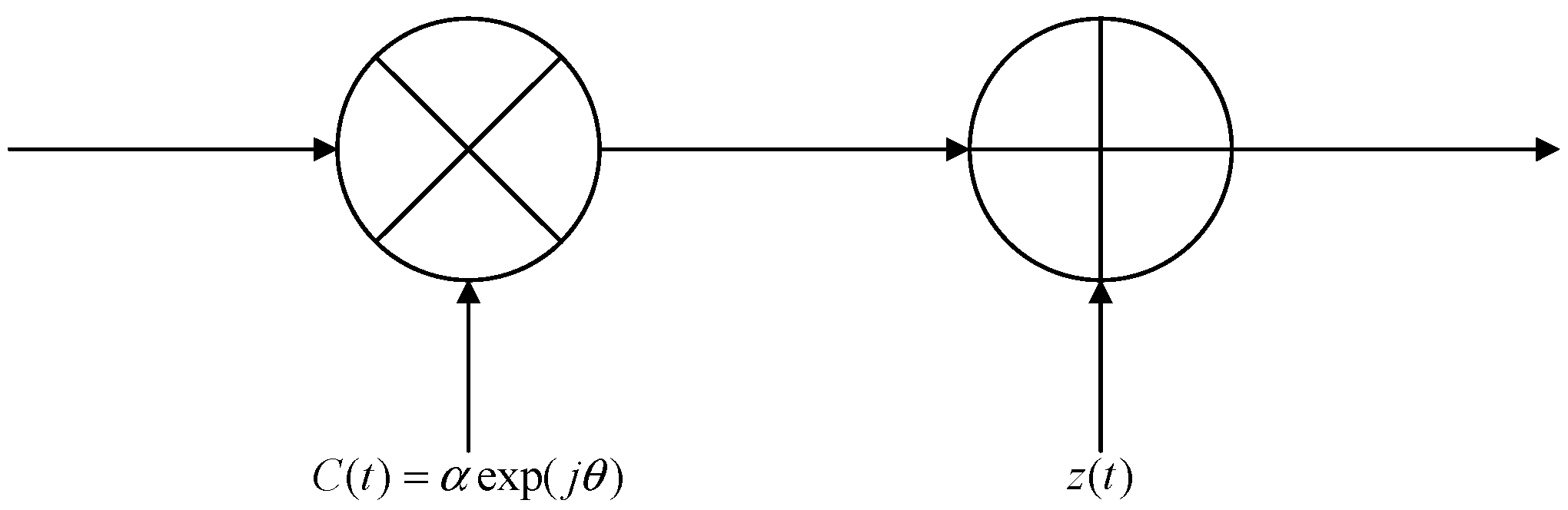
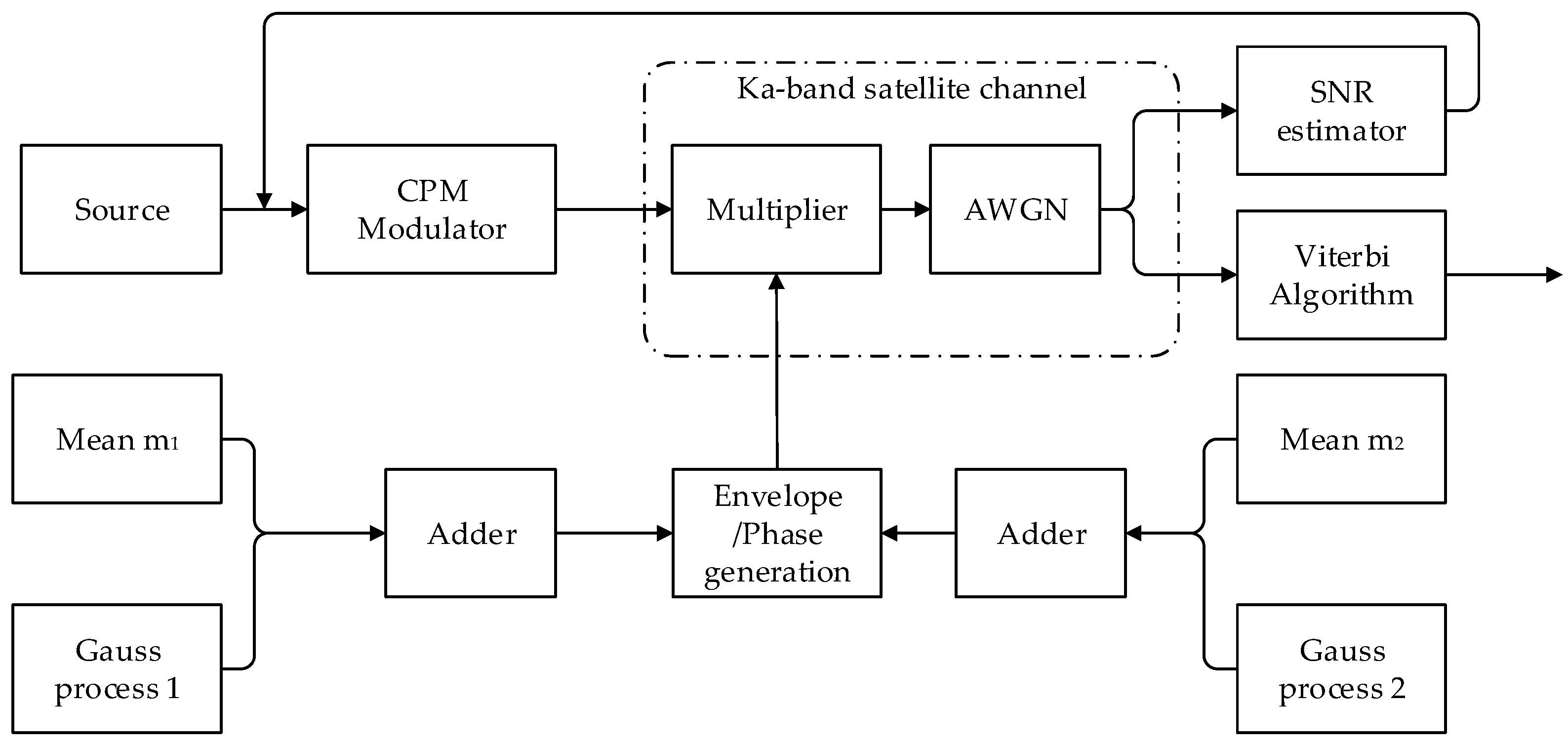
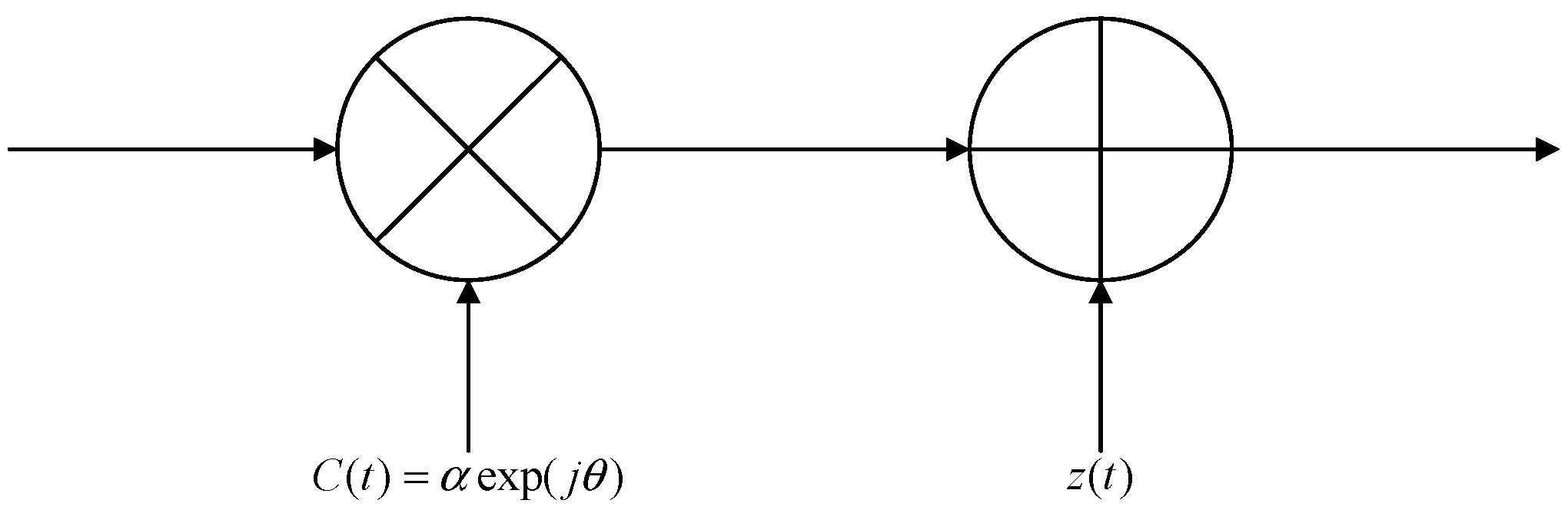
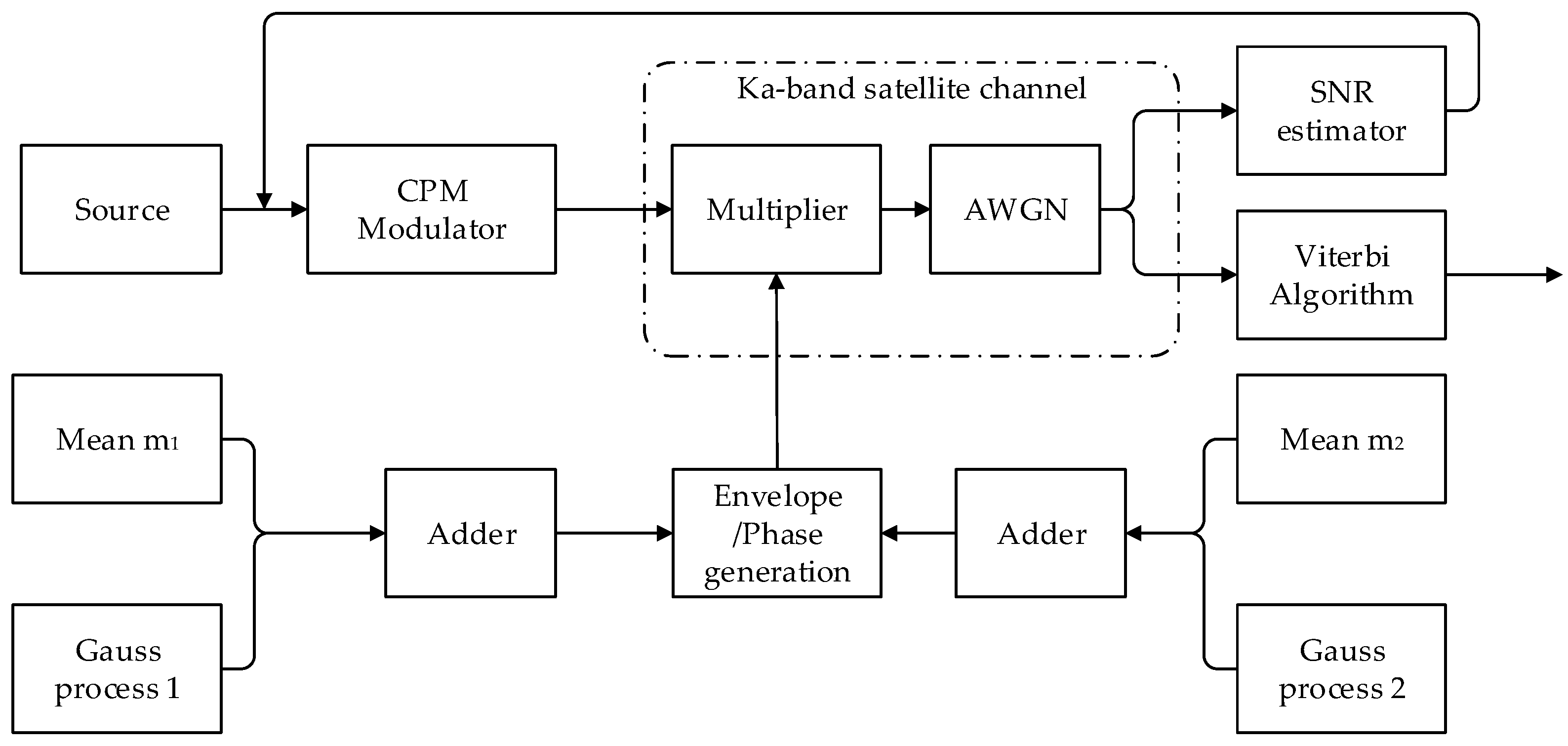
3. System Model
4. SNR Estimators
4.1. DA ML Estimator
4.2. M2M4 Estimator
4.3. Performance Index
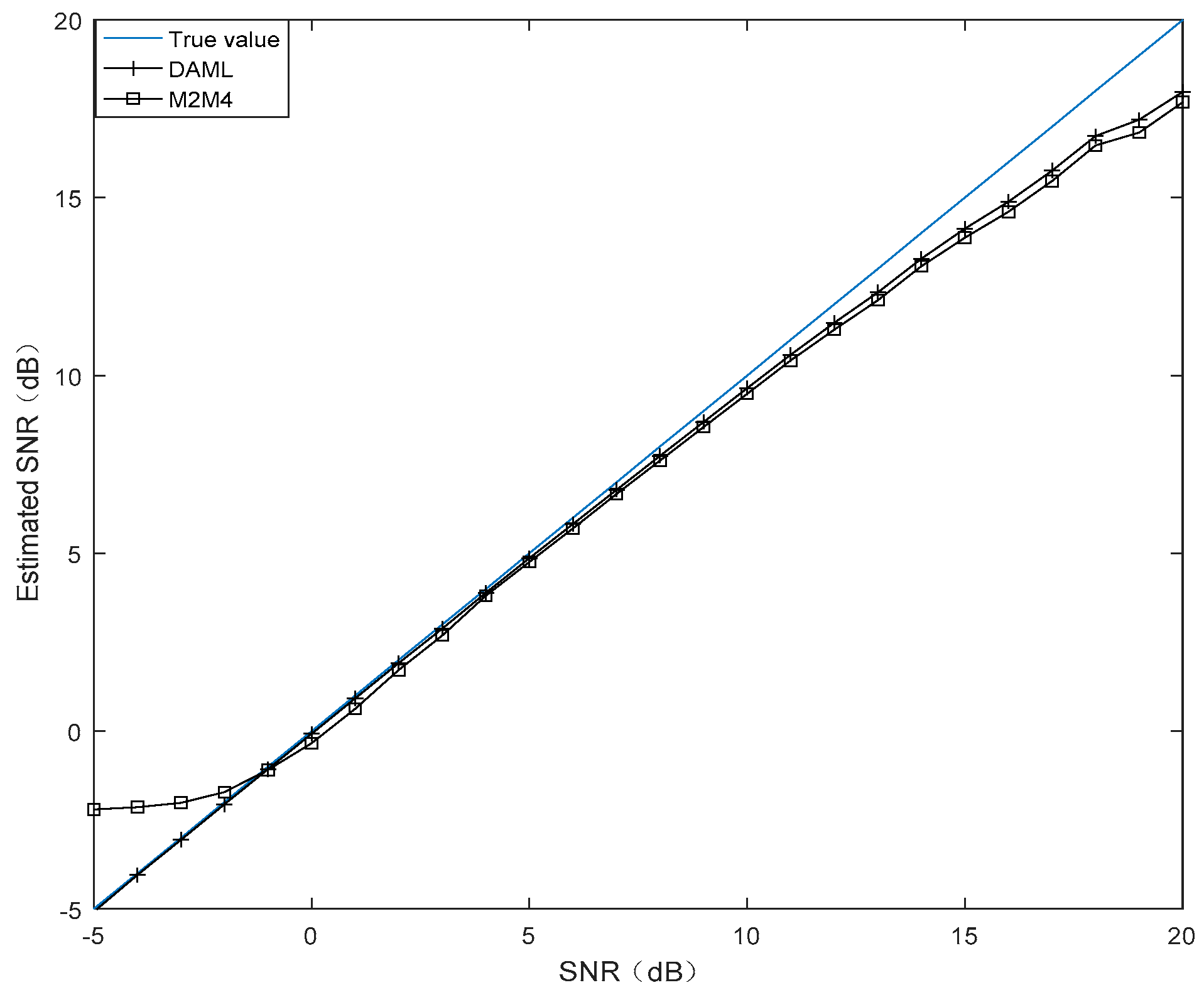
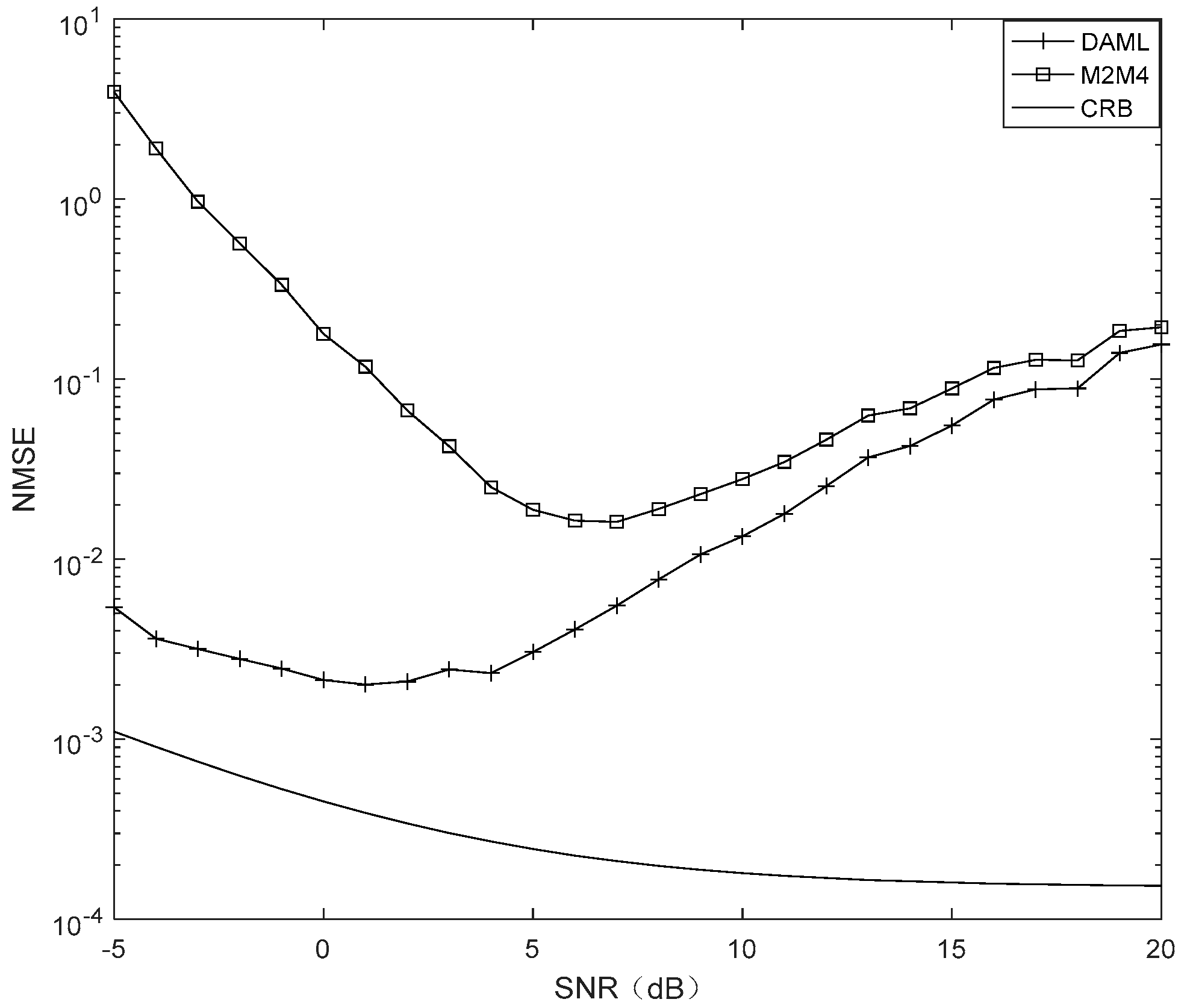
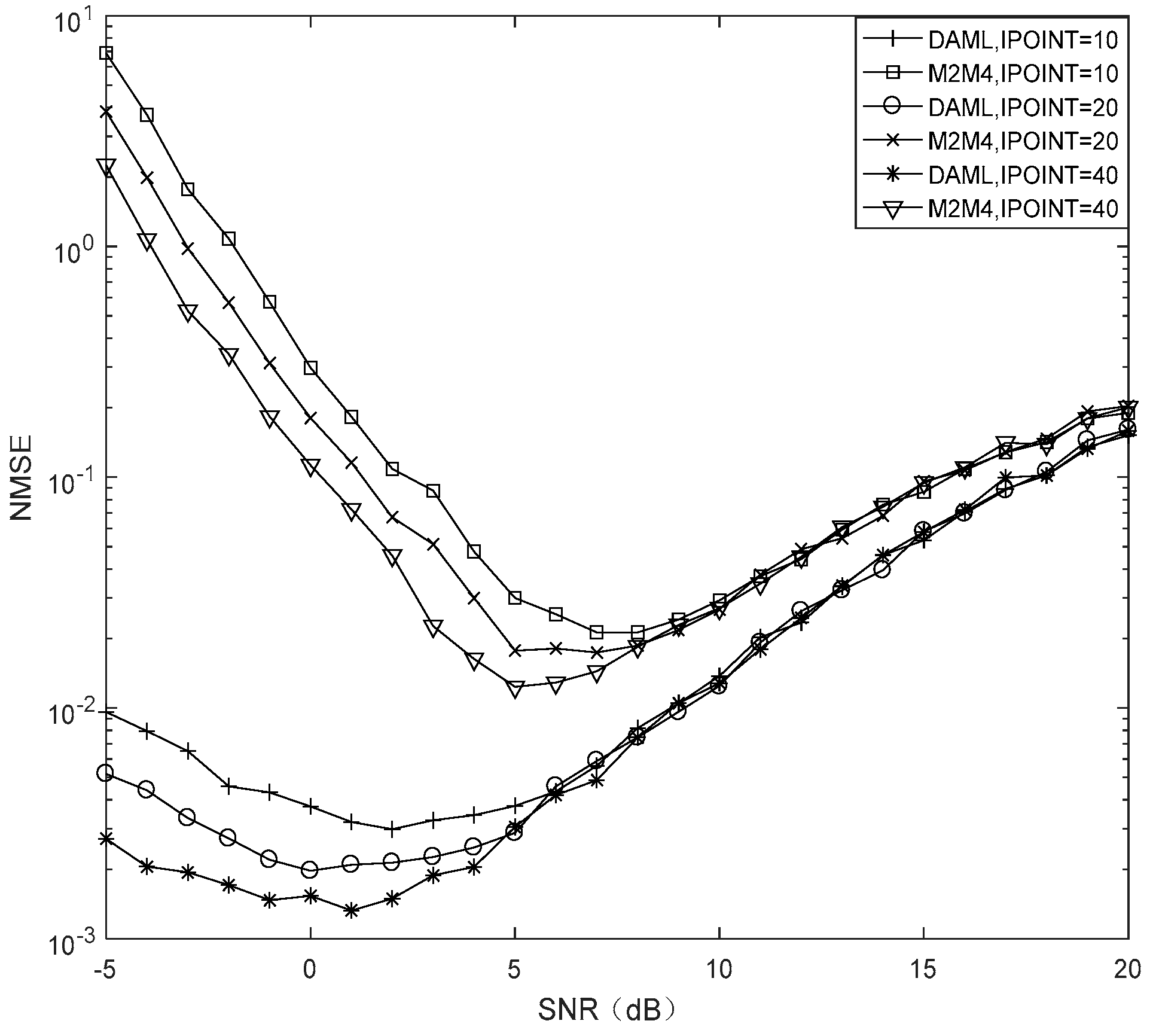
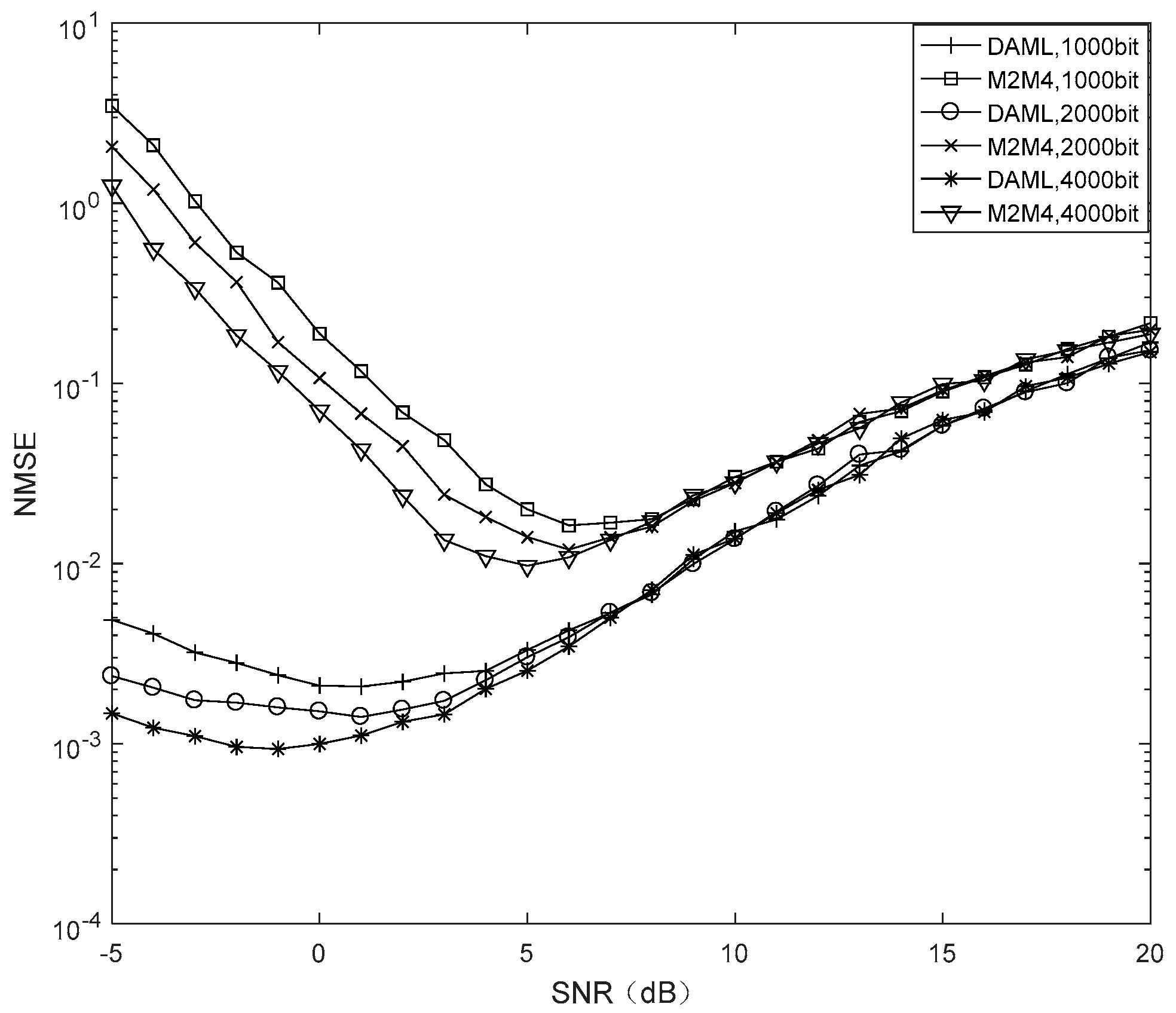
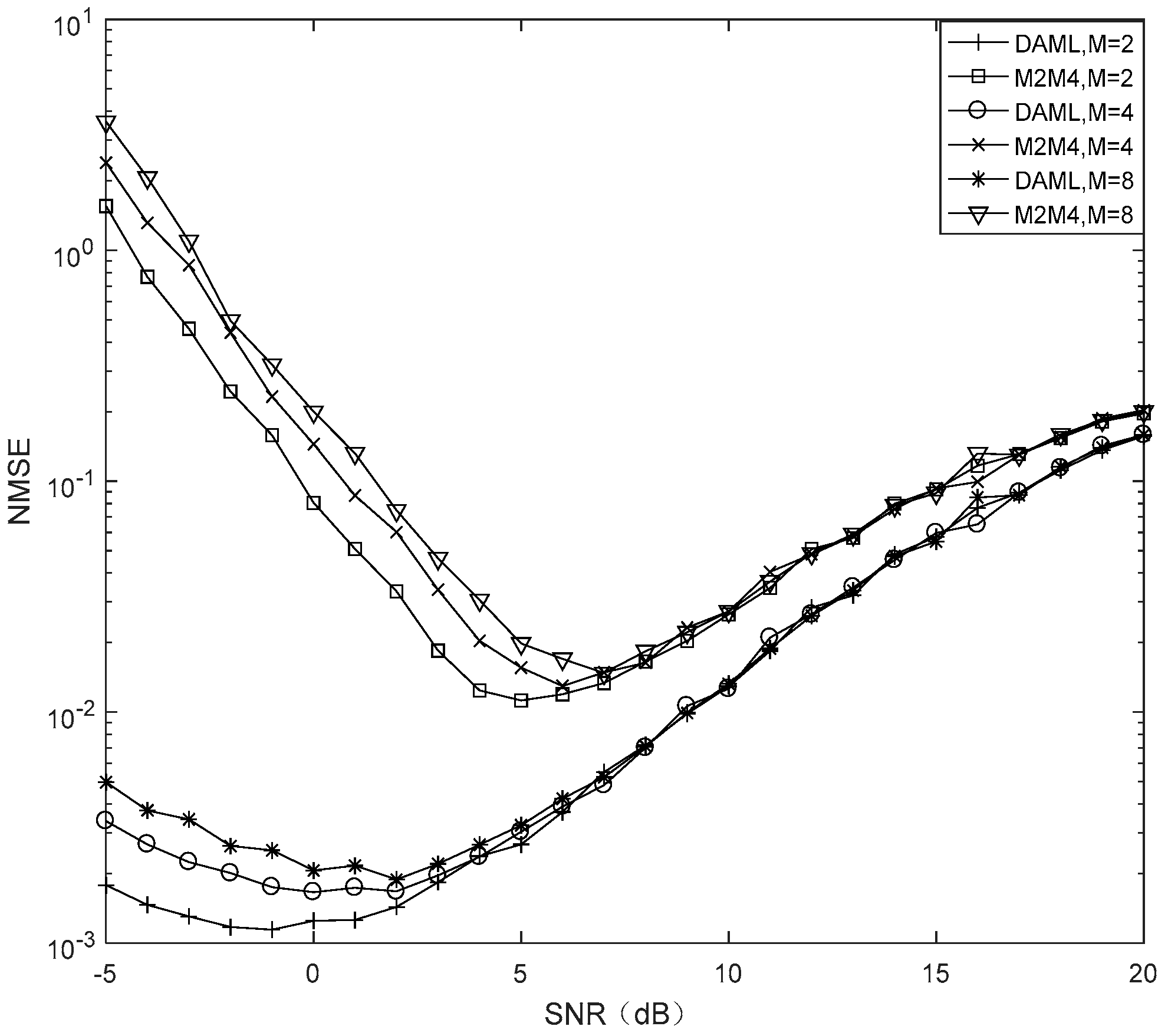
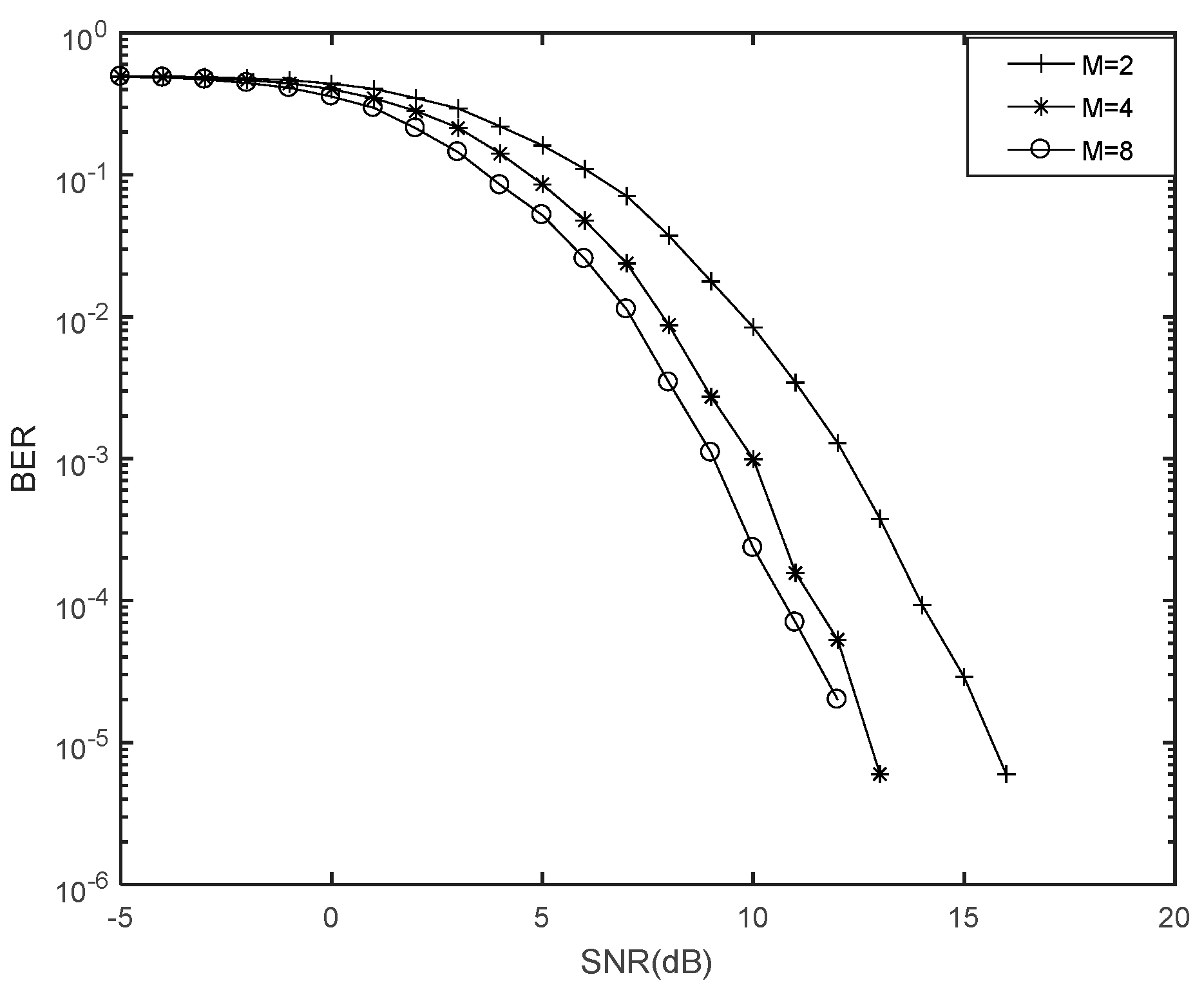
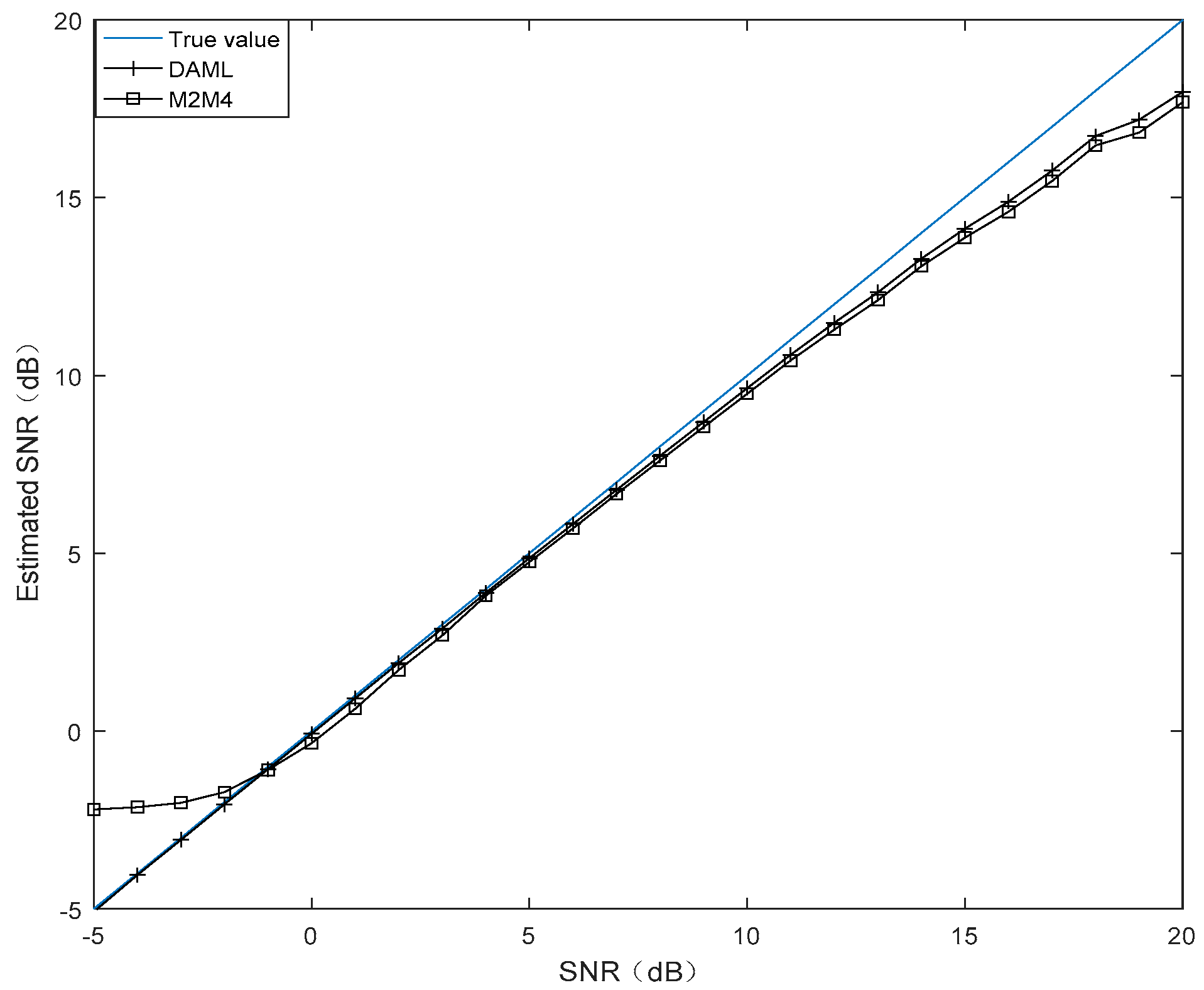
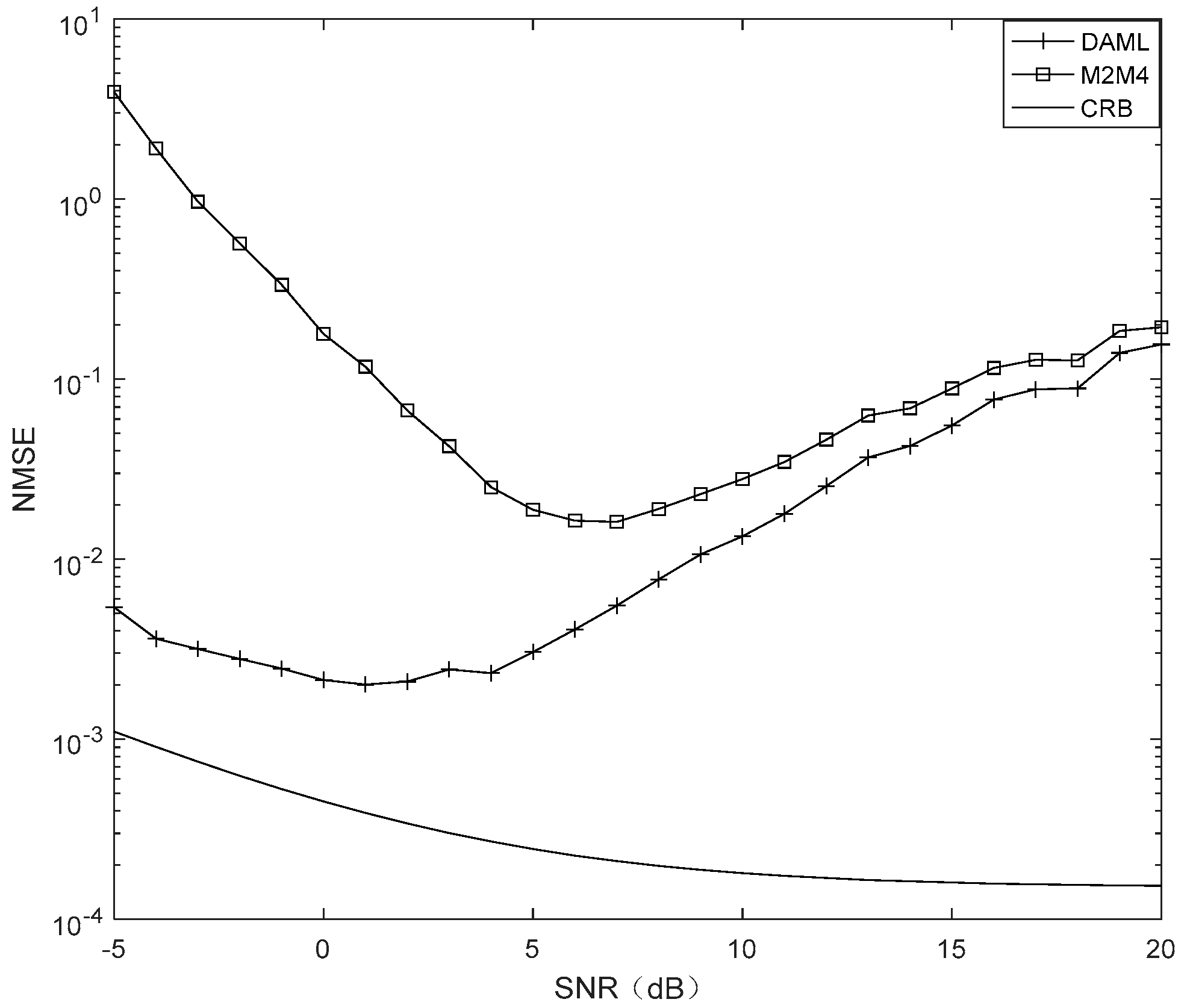
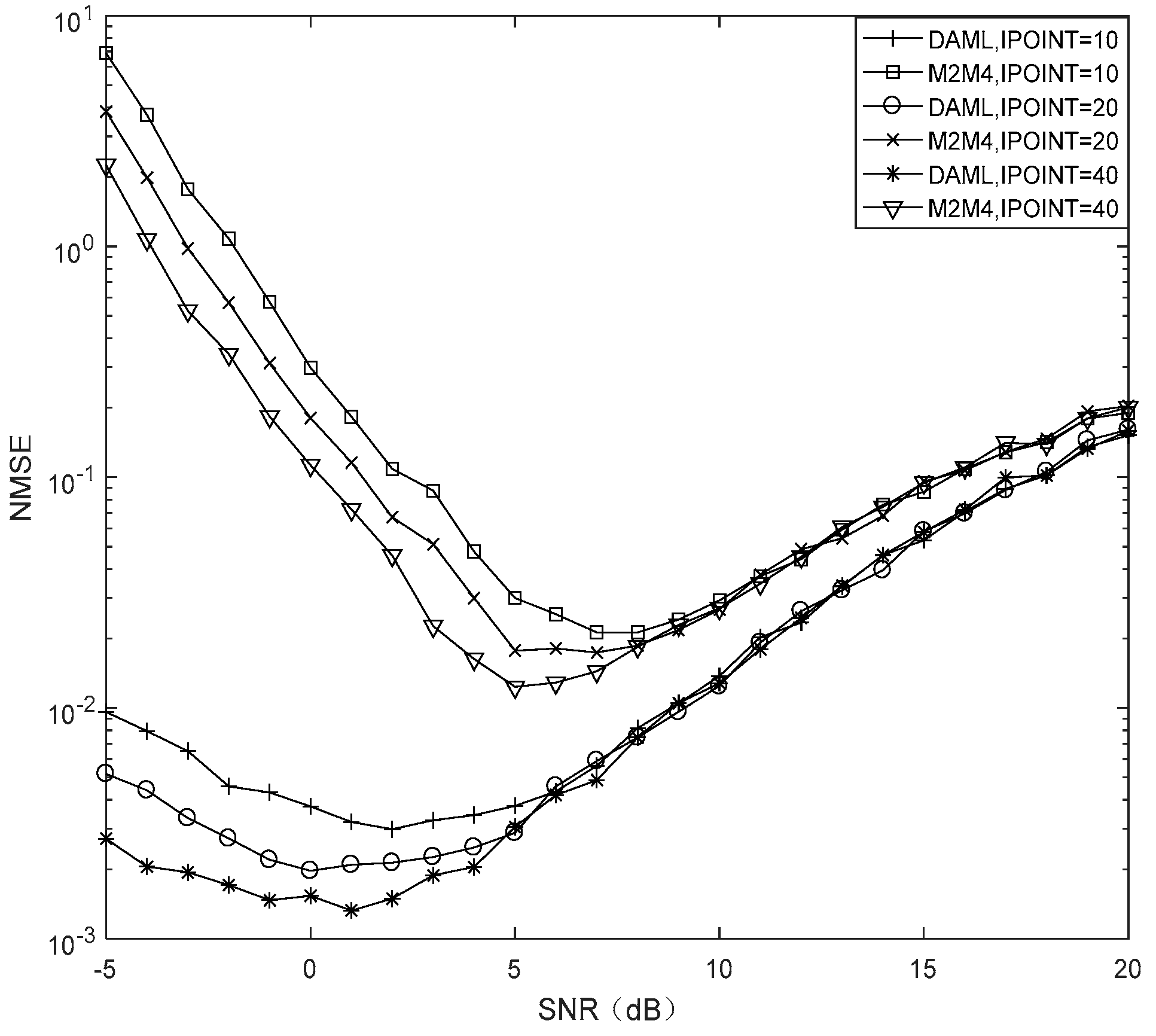
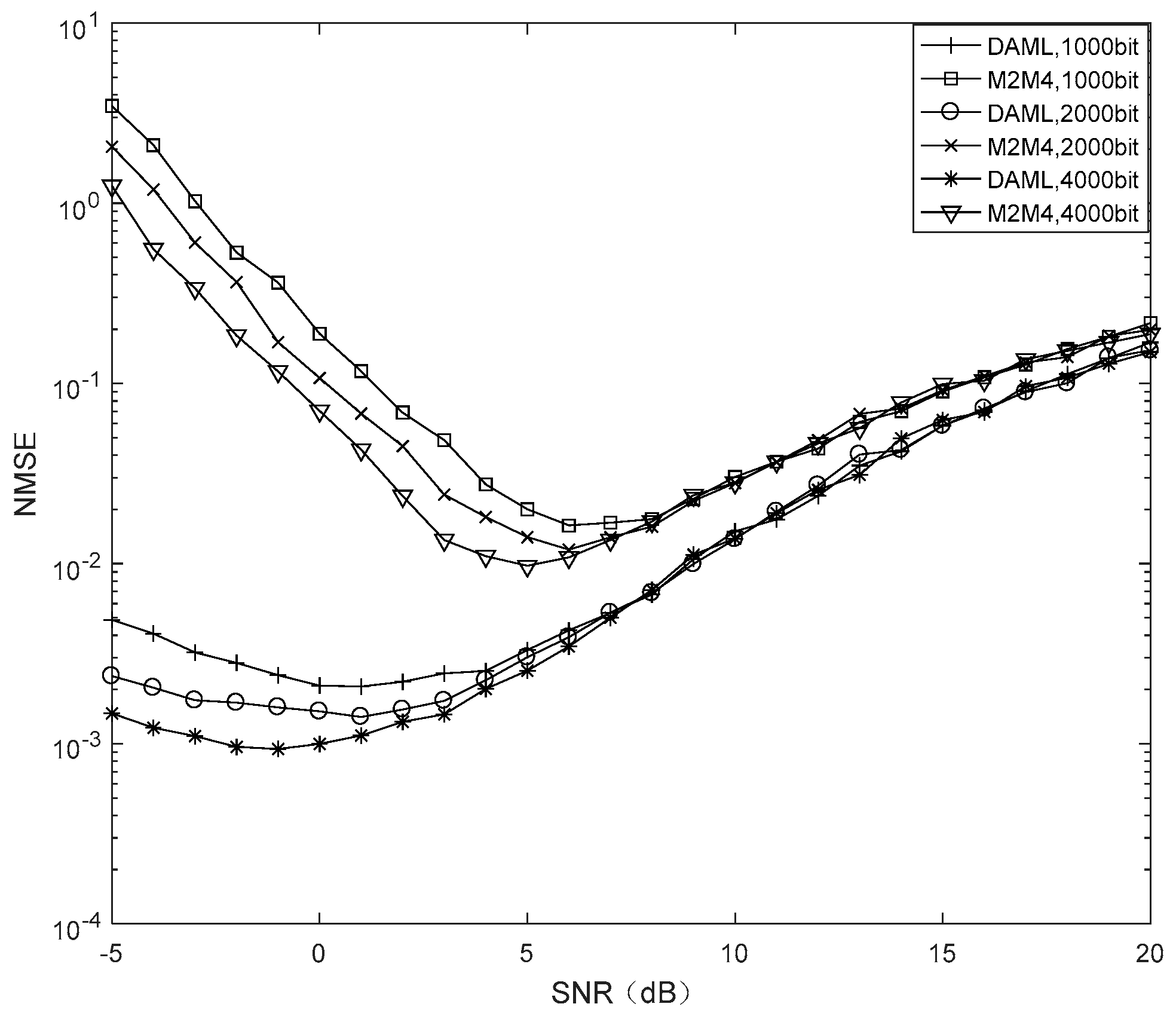
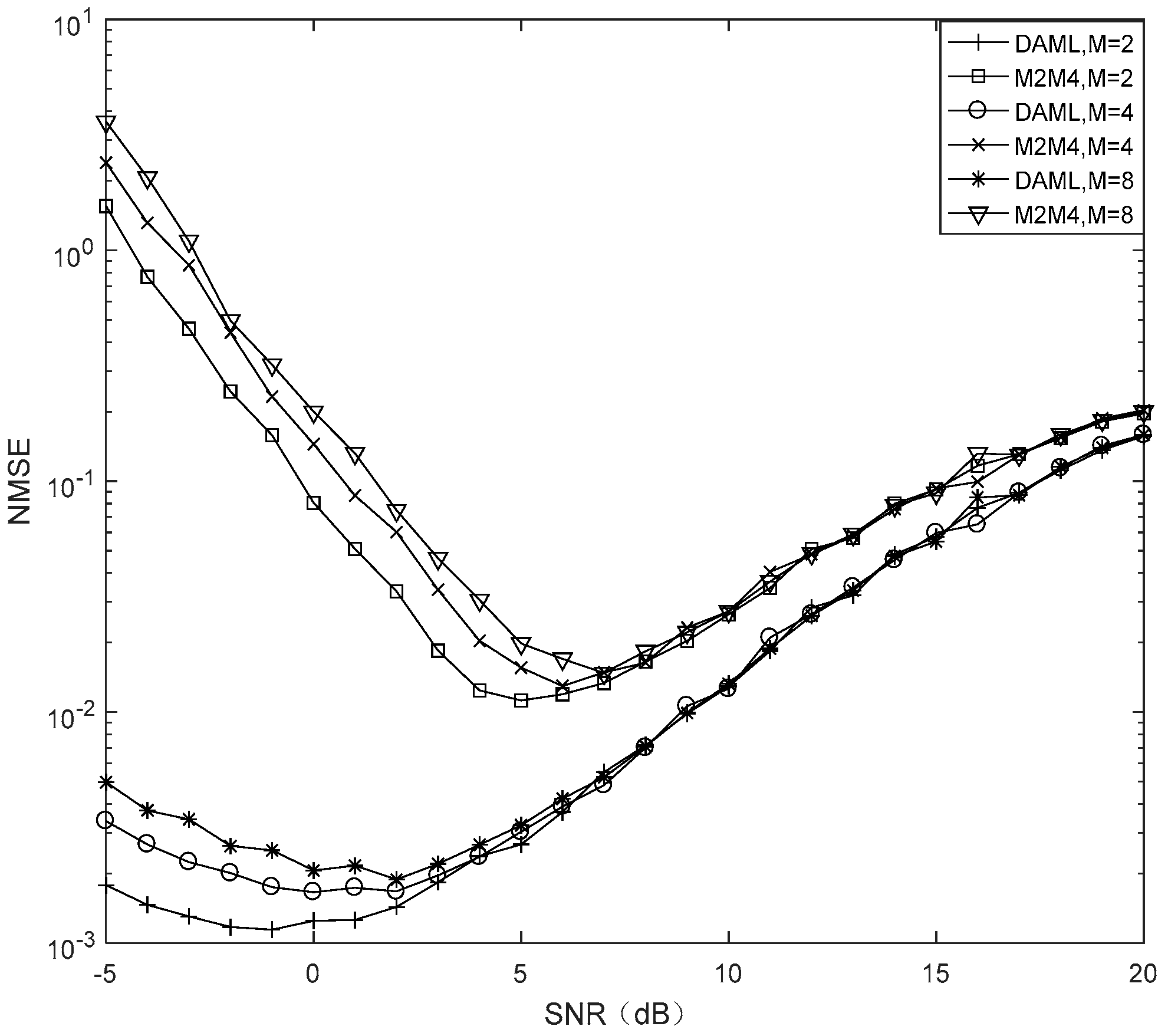
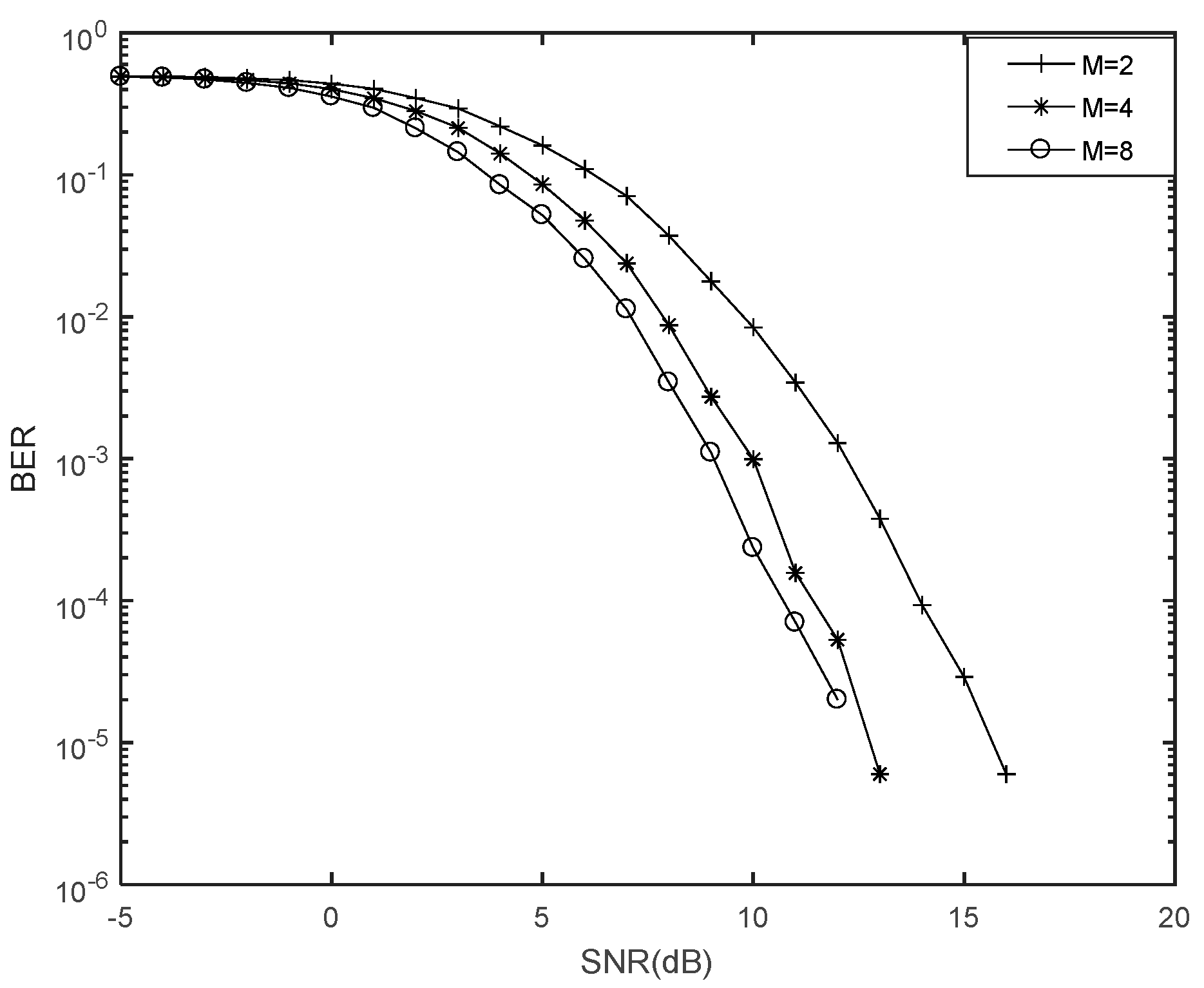
5. Numerical Results and Analysis
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rossi, T.; de Sanctis, M.; Ruggieri, M. Satellite communication and propagation experiments through the alphasat Q/V band Aldo Paraboni technology demonstration payload. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 18–27. [Google Scholar] [CrossRef]
- Cianca, E.; Rossi, T.; Yahalom, A. EHF for satellite communications: The new broadband frontier. Proc. IEEE 2011, 99, 1858–1881. [Google Scholar] [CrossRef]
- Dai, C.Q.; Huang, N.N.; Chen, Q. Adaptive transmission scheme in Ka-band satellite communications. In Proceedings of the 2016 IEEE International Conference on Digital Signal Processing, Beijing, China, 16–18 October 2016; pp. 336–340. [Google Scholar]
- Ojo, J.S.; Owolawi, P.A. Application of synthetic storm technique for diurnal and seasonal variation of slant path Ka-band rain attenuation time series over a subtropical location in South Africa. Int. J. Antennas Propag. 2015. [Google Scholar] [CrossRef]
- Luini, L.; Capsoni, C. Prediction of monthly rainfall statistics from data with long integration time. Electron. Lett. 2013, 49, 1104–1106. [Google Scholar] [CrossRef]
- Shrestha, S.; Nadeem, I.; Kim, S.; Han, S.; Choi, D. Rain Specific Attenuation and Frequency Scaling approach in Slant-Path for Ku and Ka-Band Experiments in South Korea. In Proceedings of the 16th International Conference on Electronics, Information, and Communication, Phuket, Thailand, 11–14 January 2017. [Google Scholar]
- Kourogiorgas, C.; Panagopoulos, A.D. A rain-attenuation stochastic dynamic model for LEO satellite systems above 10 GHz. IEEE Trans. Veh. Technol. 2015, 64, 829–834. [Google Scholar] [CrossRef]
- Yang, Z.; Li, H.; Jiao, J. CFDP-based two-hop relaying protocol over weather-dependent Ka-band space channel. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1357–1374. [Google Scholar] [CrossRef]
- Zain, A.F.M.; Albendag, A.A.M. Improving ITU-R rain attenuation model for HAPS earth-space link. In Proceedings of the 2013 IEEE International Conference on Space Science and Communication, Melaka, Malaysia, 1–3 July 2013; pp. 56–59. [Google Scholar]
- Shrestha, S.; Choi, D. Characterization of Rain Specific Attenuation and Frequency Scaling Method for Satellite Communication in South Korea. Int. J. Antennas Propag. 2017. [Google Scholar] [CrossRef]
- Shrestha, S.; Choi, D. Study of rain attenuation in Ka band for satellite communication in South Korea. J. Atmos. Sol. Terr. Phys. 2016, 148, 53–63. [Google Scholar] [CrossRef]
- Shrestha, S.; Choi, D. Study of 1-min rain rate integration statistic in South Korea. J. Atmos. Sol. Terr. Phys. 2017, 155, 1–11. [Google Scholar] [CrossRef]
- Shrestha, S.; Park, J.J.; Choi, D.Y. Rain rate modeling of 1-min from various integration times in South Korea. SpringerPlus 2016, 51, 433. [Google Scholar] [CrossRef] [PubMed]
- Acquisition, Presentation and Analysis of Data in Studies of Radio Wave Propagation. Available online: https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.311-16-201609-I!!PDF-E.pdf (accessed on 29 June 2017).
- Usha, S.M.; Nataraj, K.R. Bit Error Rate Analysis Using QAM Modulation for Satellite Communication Link. Procedia Technol. 2016, 25, 456–463. [Google Scholar] [CrossRef]
- Cariolaro, G. A system-theory approach to decompose CPM signals into PAM waveforms. IEEE Trans. Commun. 2010, 58, 200–210. [Google Scholar] [CrossRef]
- Cariolaro, G.; Erseghe, T.; Laurenti, N. New Results on the Spectral Analysis of Multi-h CPM Signals. IEEE Trans. Commun. 2011, 59, 1893–1903. [Google Scholar] [CrossRef]
- Wiesel, A.; Goldberg, J.; Messer, H. Non-data-aided signal-to-noise-ratio estimation. In Proceedings of the IEEE International Conference on Communications, New York, NY, USA, 28 April–2 May 2002; pp. 197–201. [Google Scholar]
- Rice, M. Data-Aided and Non-Data-Aided Maximum Likelihood SNR Estimators for CPM. IEEE Trans. Commun. 2015, 63, 4244–4253. [Google Scholar] [CrossRef]
- Chang, L.; Li, G.Y.; Li, J. Closed-Form SNR Estimator for MPSK Signals in Nakagami Fading Channels. IEEE Trans. Veh. Technol. 2016, 65, 6878–6887. [Google Scholar] [CrossRef]
- Wu, H.; Sha, Z.C.; Huang, Z.T. Signal-to-noise ratio estimation for DVB-S2 based on eigenvalue decomposition. Commun. IET 2016, 10, 1–7. [Google Scholar] [CrossRef]
- Li, Z.; Yang, D.; Wang, H. Maximum likelihood SNR estimator for coded MAPSK signals in slow fading channels. In Proceedings of the 2013 International Conference on Wireless Communications and Signal Processing, Hangzhou, China, 24–26 October 2013; pp. 1–6. [Google Scholar]
- Matricciani, E.; Riva, C. Evaluation of the feasibility of satellite systems design in the 10–100 GHZ frequency range. Int. J. Satell. Commun. 1998, 16, 237–247. [Google Scholar] [CrossRef]
- Loo, C. Impairment of digital transmission through a Ka band satellite channel due to weather conditions. Int. J. Satell. Commun. Netw. 1998, 16, 137–145. [Google Scholar] [CrossRef]
- Loo, C. Statistical models for land mobile and fixed satellite communications at Ka band. In Proceedings of the Vehicular Technology Conference, Atlanta, GA, USA, 28 April–1 May 1996; pp. 1023–1027. [Google Scholar]
- Kay, S.M.M. Fundamentals of Statistical Signal Processing, Volume I: Estimation Theory; Prentice Hall Press: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Alagha, N.S. Cramer-Rao bounds of SNR estimates for BPSK and QPSK modulated signals. IEEE Commun. Lett. 2001, 5, 10–12. [Google Scholar] [CrossRef]
- Pauluzzi, D.R.; Beaulieu, N.C. A comparison of SNR estimation techniques for the AWGN channel. IEEE Trans. Commun. 2000, 48, 1681–1691. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Weather Conditions | ||||
|---|---|---|---|---|
| Clear/cloudy | 0.455 | 0.00056 | 0.0079 | 0.00381 |
| Cumulus cloud | 0.346 | 0.00272 | 0.0154 | 0.00864 |
| Light rain | 0.483 | 0.00003 | 0.0088 | 0.00546 |
| Thunder shower | 0.436 | 0.01386 | 0.0068 | 0.00414 |
| Blowing snow | 0.500 | 0.00021 | 0.0089 | 0.00435 |
| Ice pellets | 0.482 | 0.00062 | 0.0094 | 0.00544 |
| Rain | 0.662 | 0.02000 | −0.0089 | 0.03077 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, R.; Cao, Y.; Wang, T. Data-Aided and Non-Data-Aided SNR Estimators for CPM Signals in Ka-Band Satellite Communications. Information 2017, 8, 75. https://doi.org/10.3390/info8030075
Xue R, Cao Y, Wang T. Data-Aided and Non-Data-Aided SNR Estimators for CPM Signals in Ka-Band Satellite Communications. Information. 2017; 8(3):75. https://doi.org/10.3390/info8030075
Chicago/Turabian StyleXue, Rui, Yang Cao, and Tong Wang. 2017. "Data-Aided and Non-Data-Aided SNR Estimators for CPM Signals in Ka-Band Satellite Communications" Information 8, no. 3: 75. https://doi.org/10.3390/info8030075