
An Extremely Efficient Boundary Element Method for Wave Interaction with Long Cylindrical Structures Based on Free-Surface Green’s Function



Abstract
:1. Introduction
2. Mathematical Theory and Algorithms
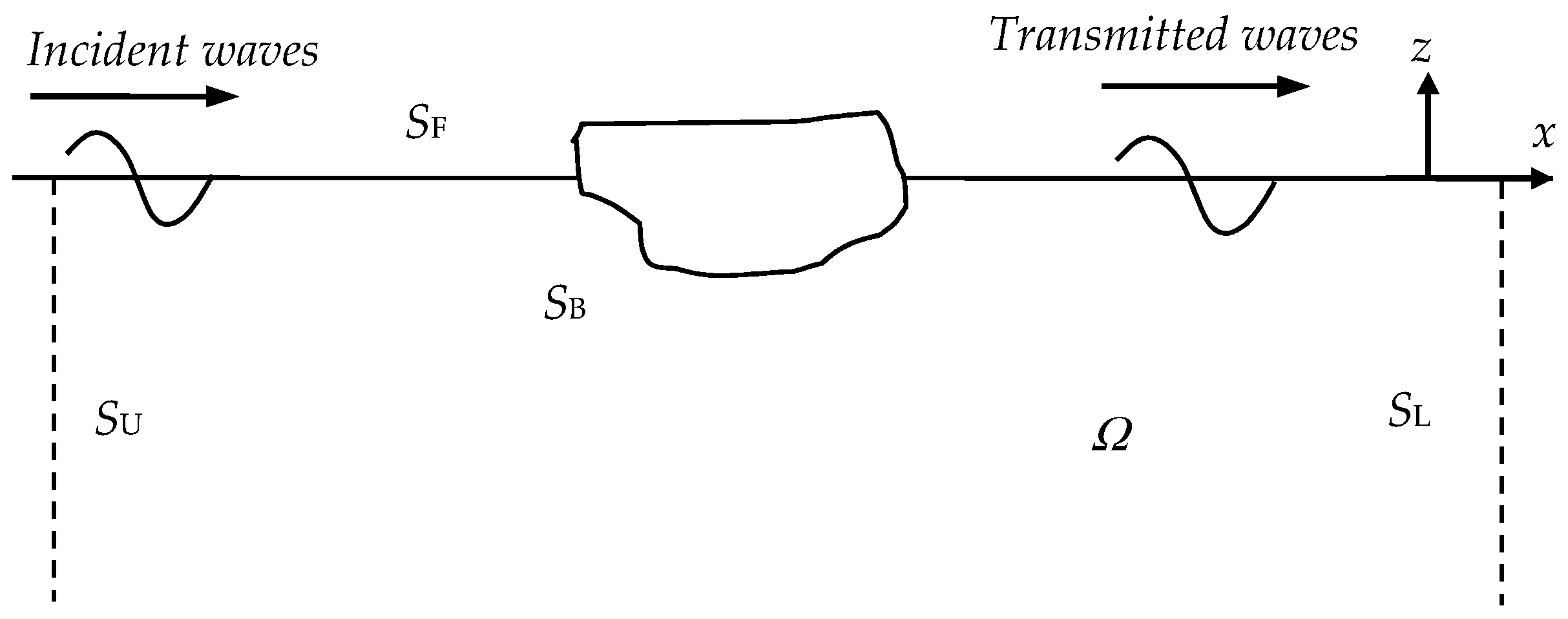
2.1. Governing Equation and Boundary Conditions
2.2. Numerical Techniques
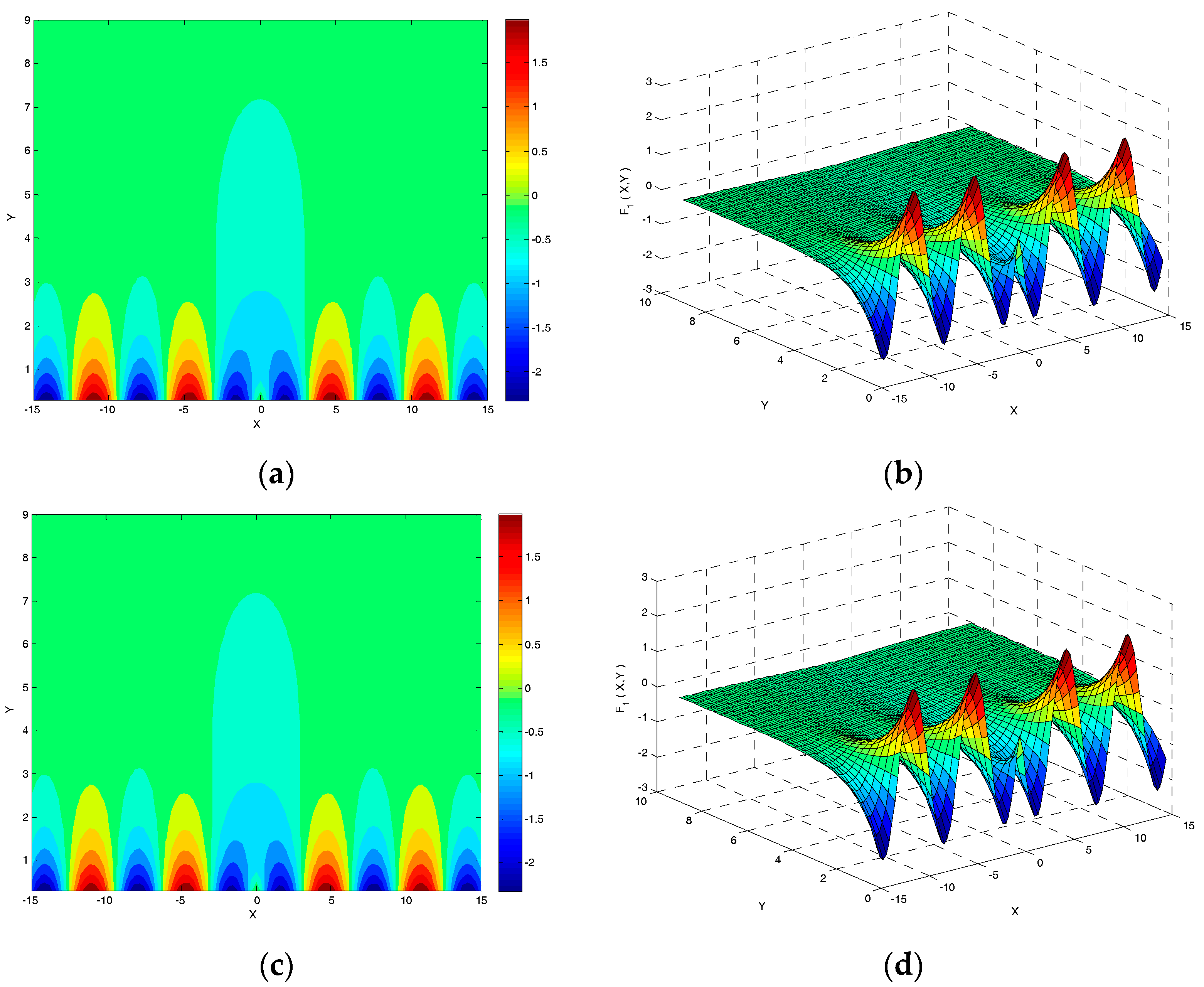
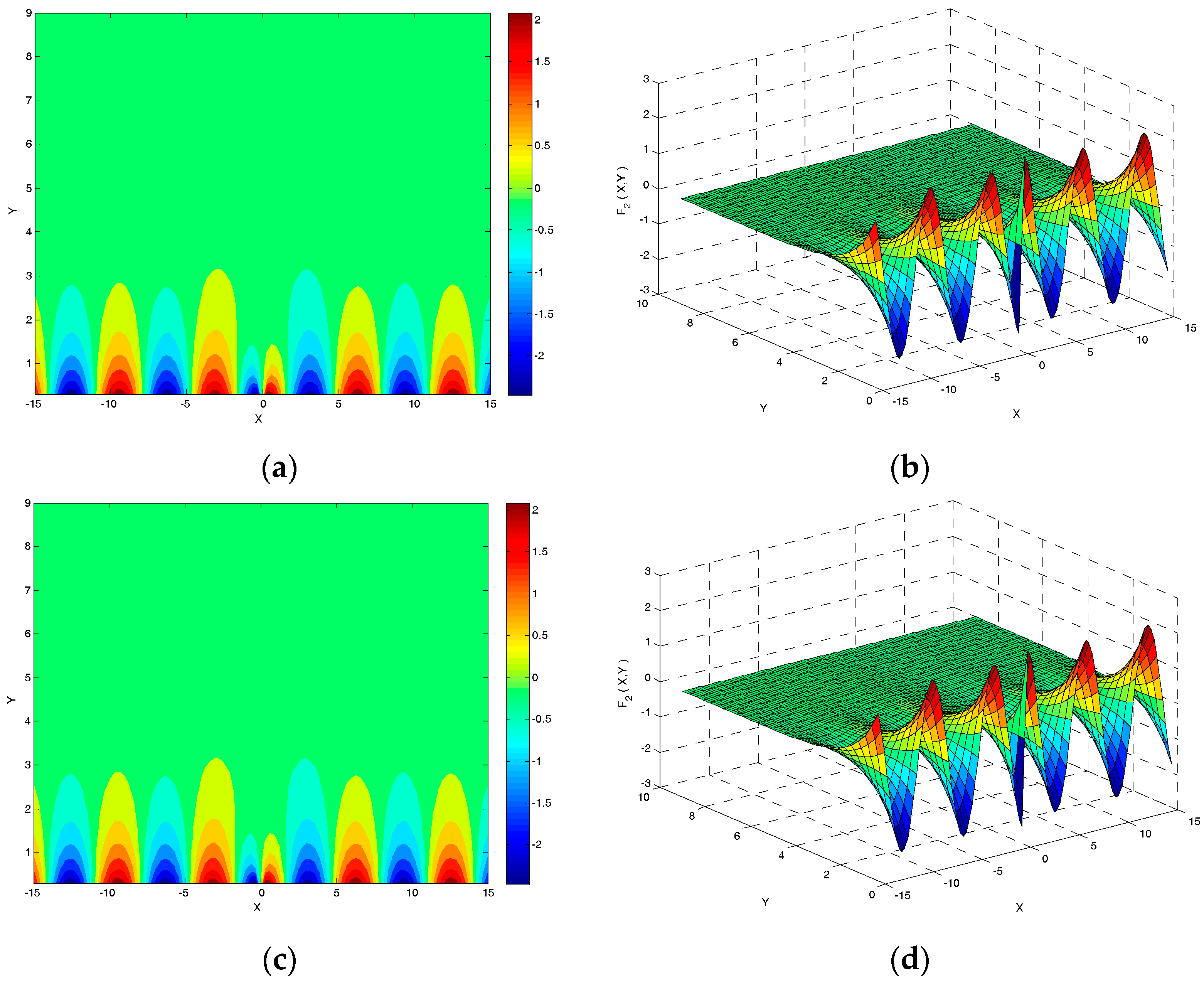
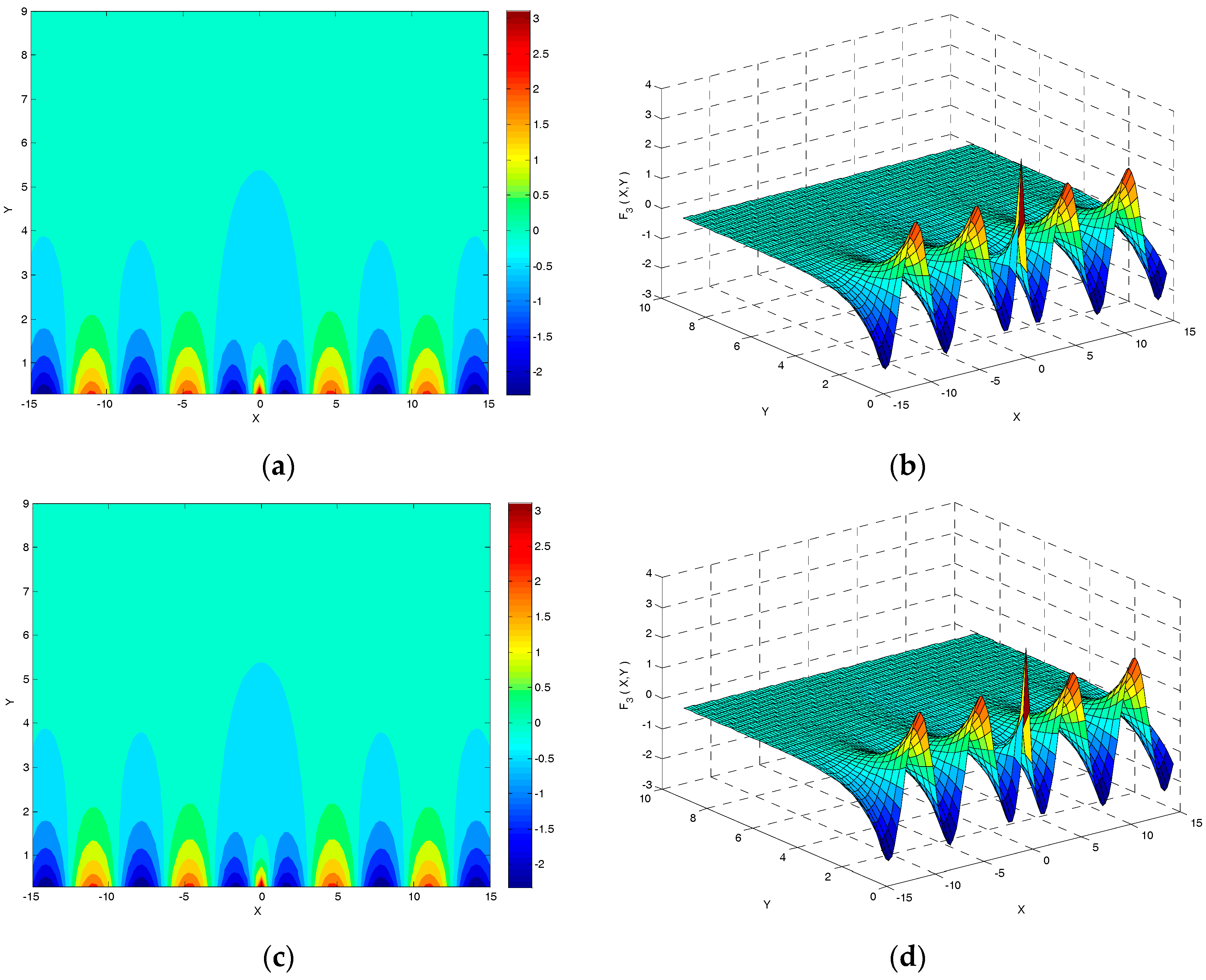
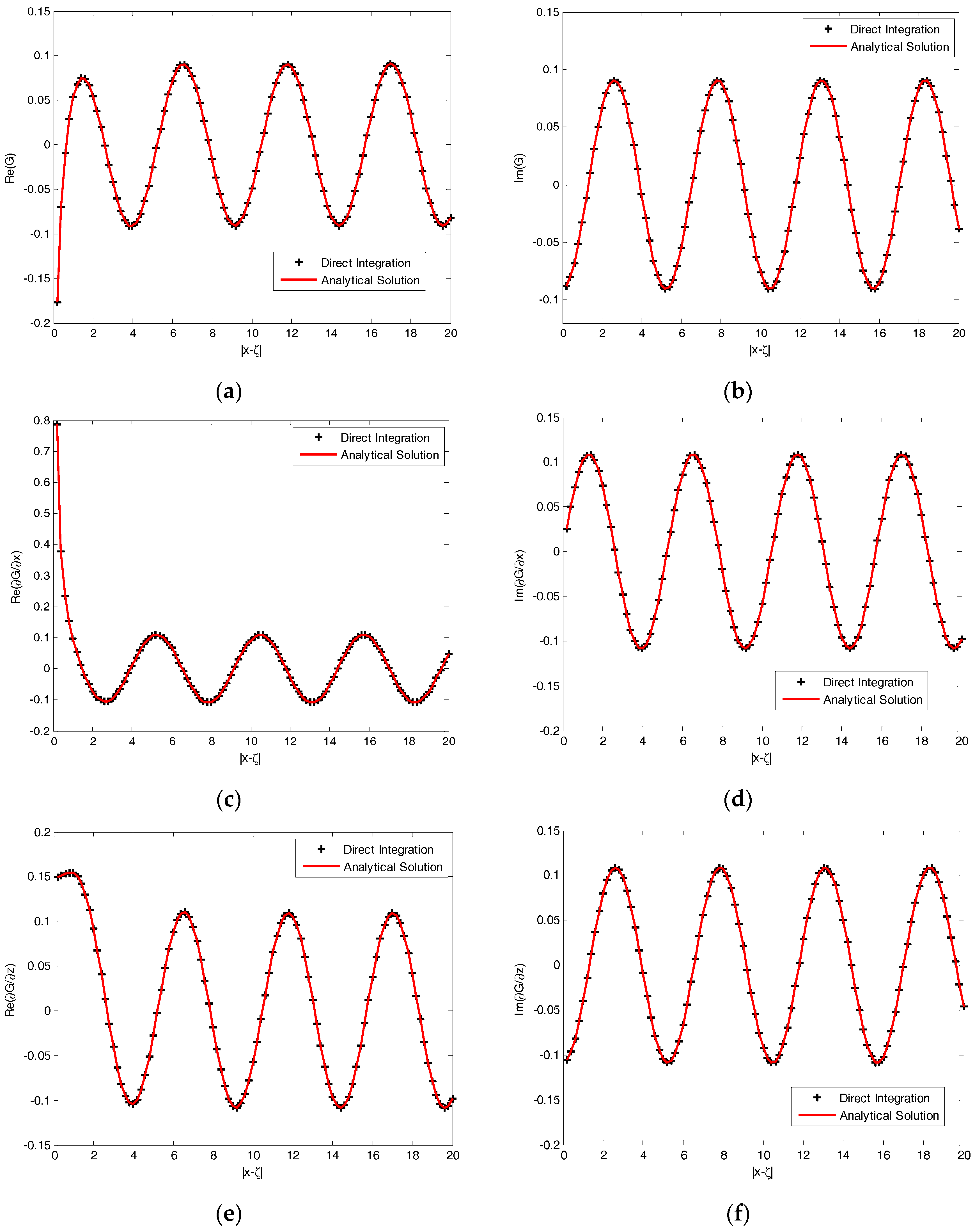
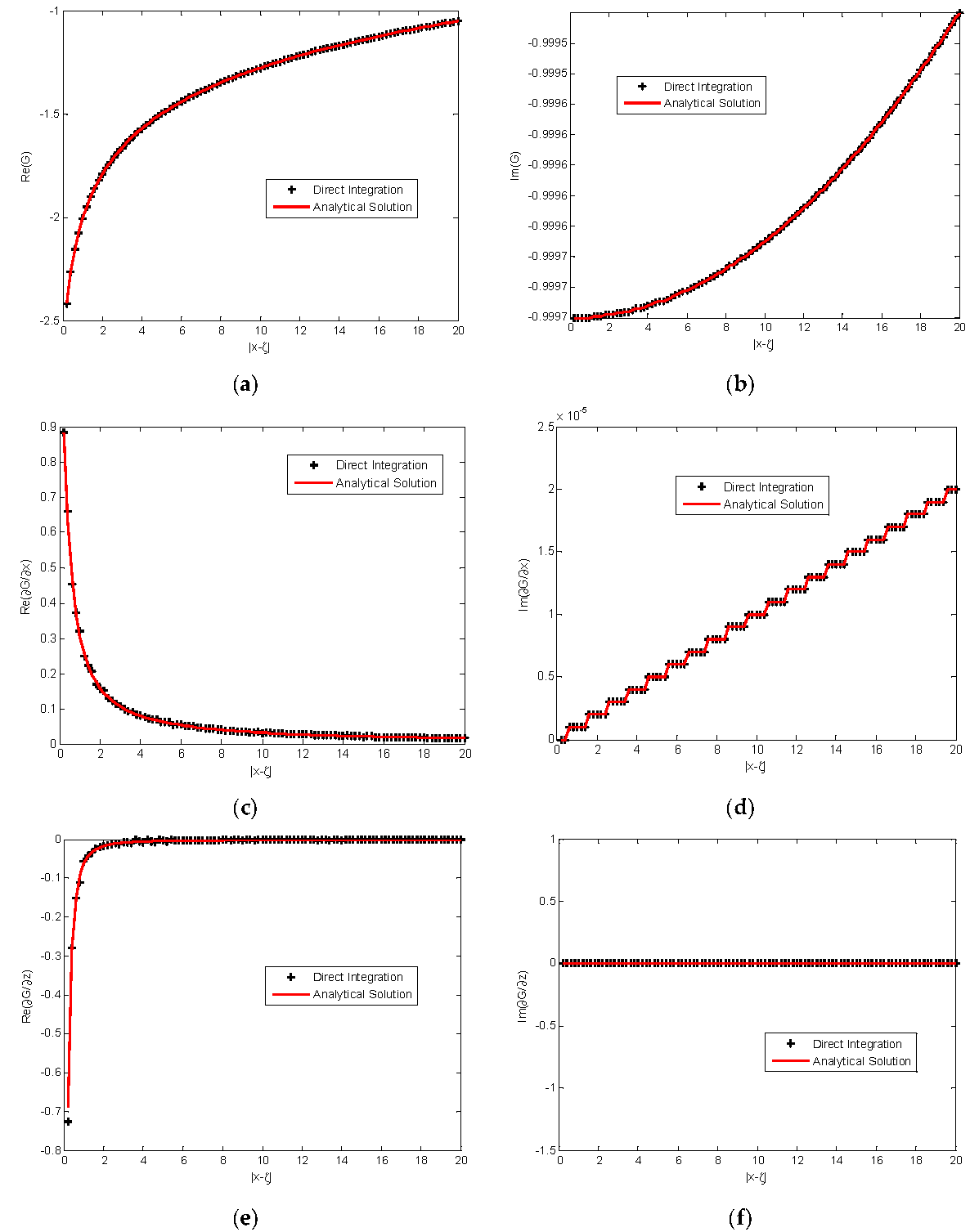
2.3. Direct Calculation of Free-Surface Green’s Function
2.4. Fast Evaluation by the Analytical Method
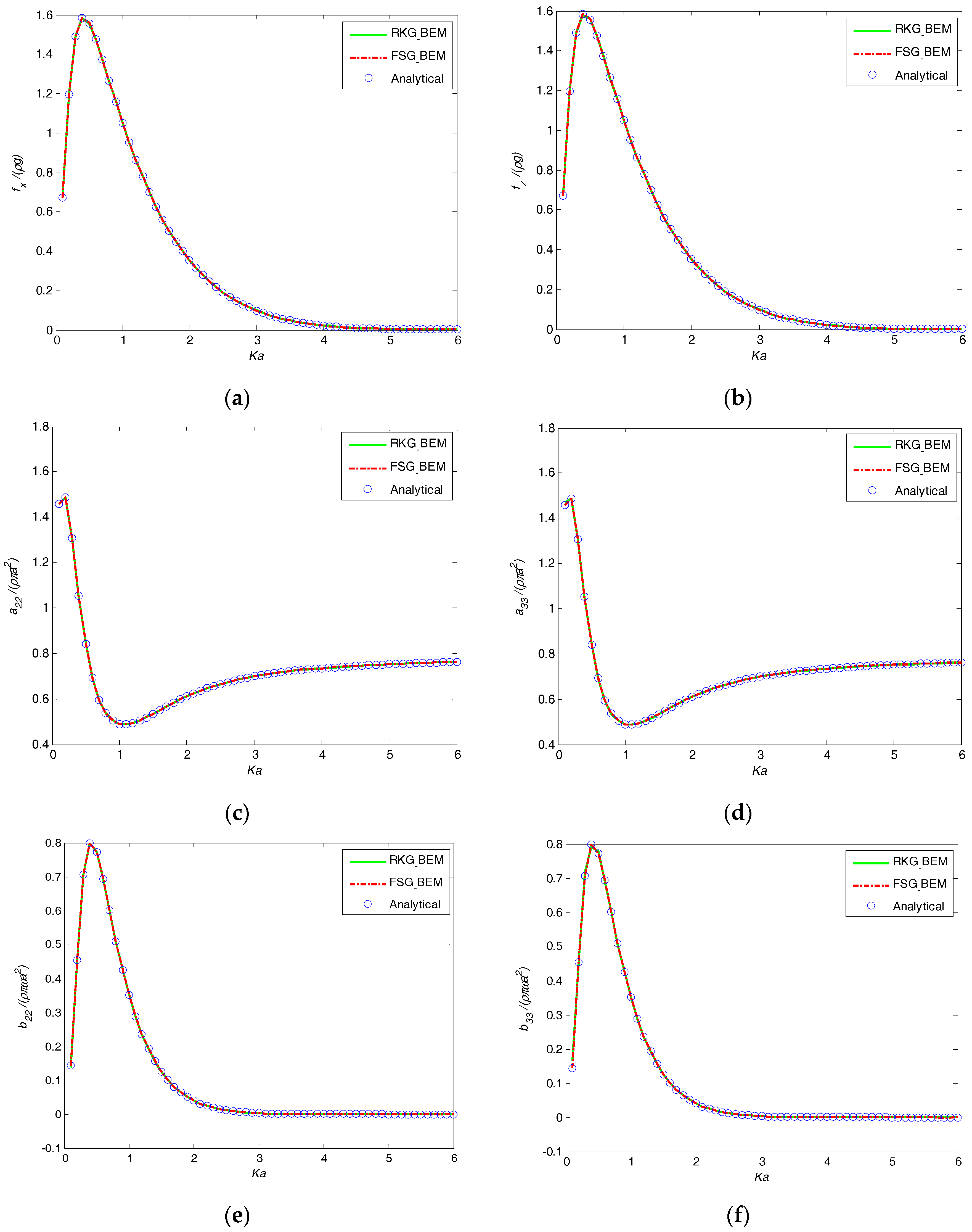
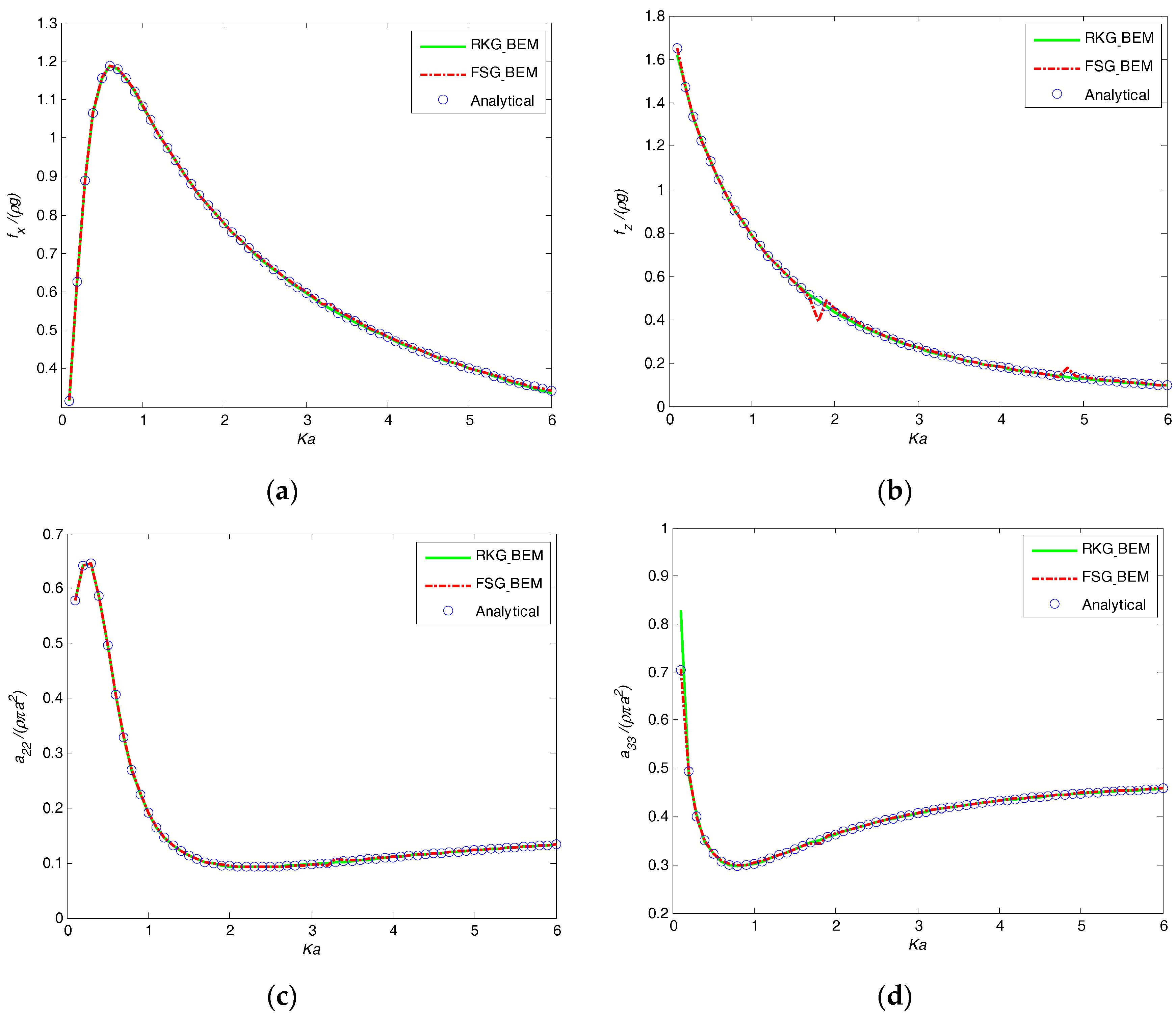
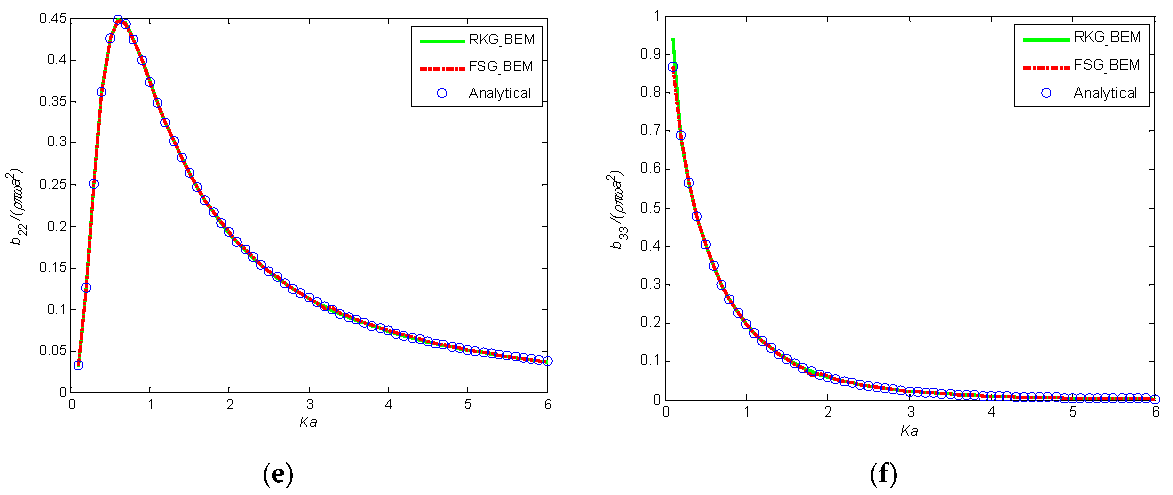
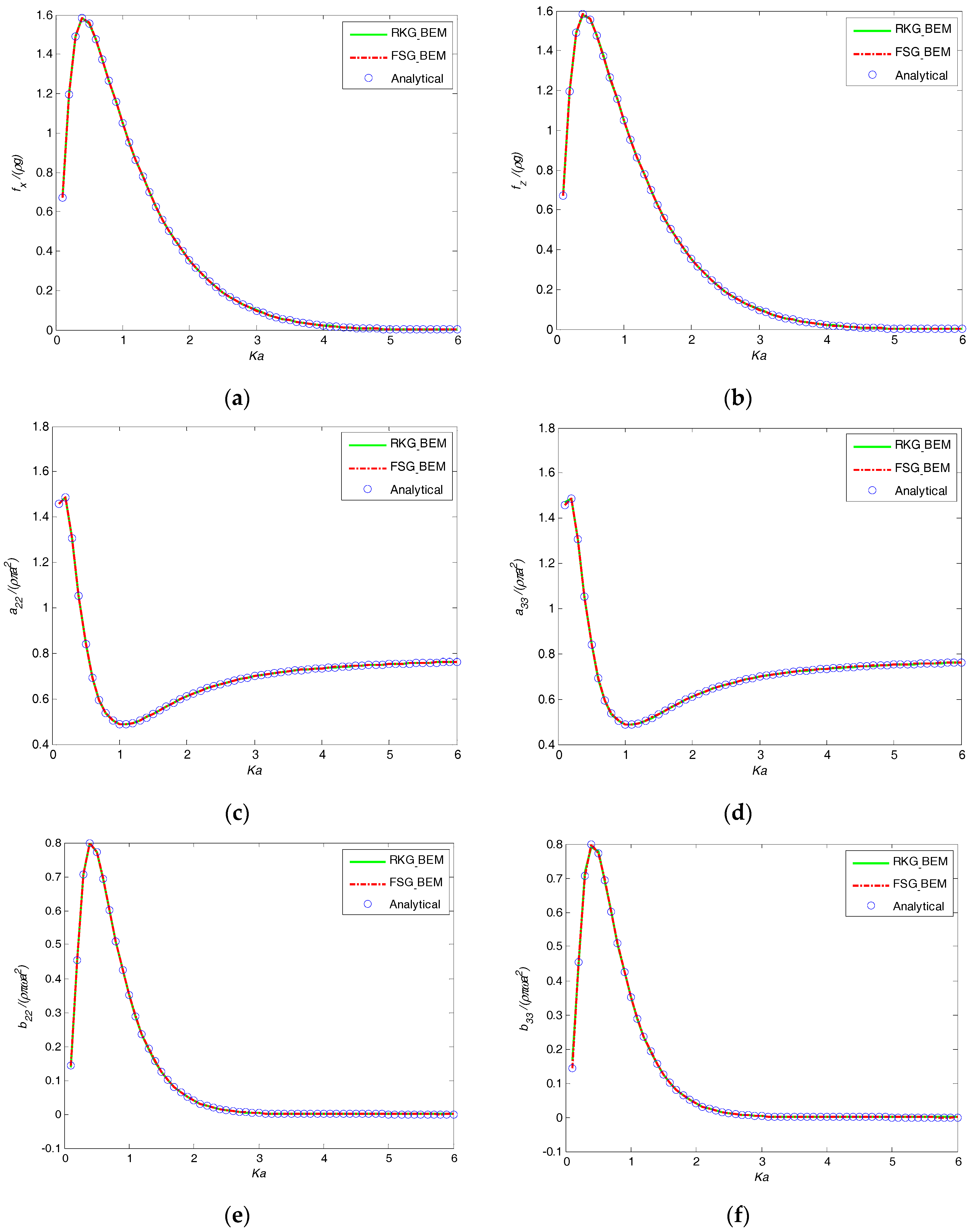
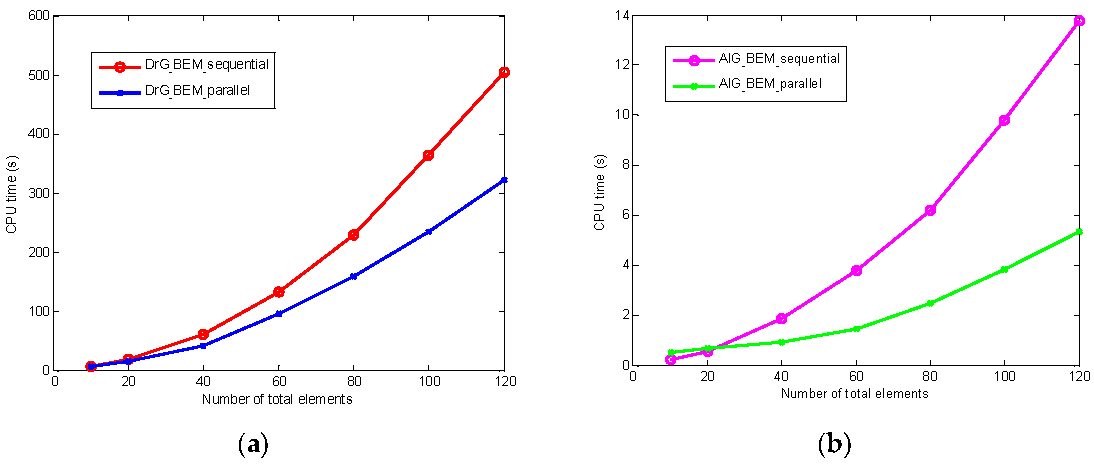
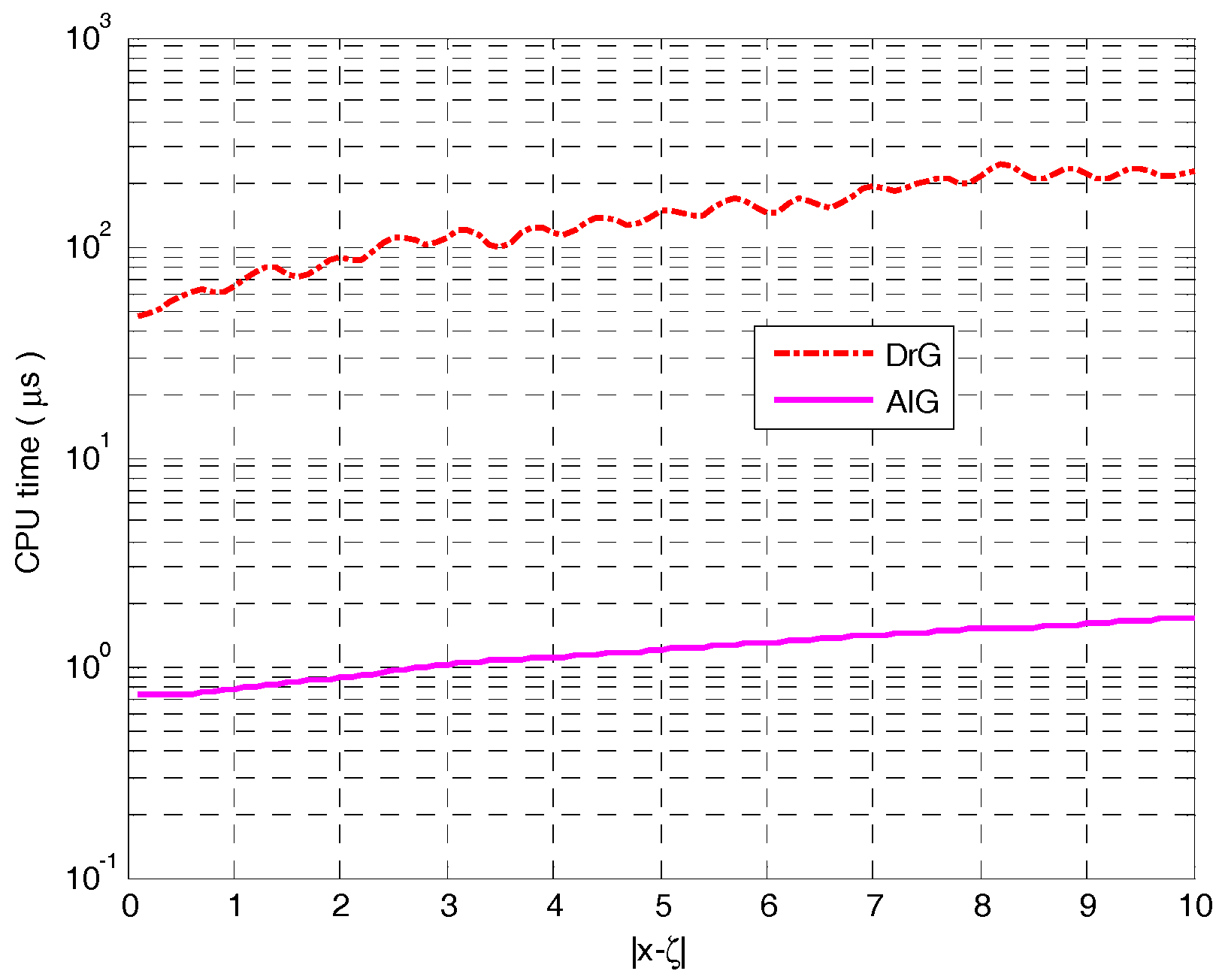
3. Numerical Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| RKG_BEM | Rankine Green function based Boundary Element Method |
| FSG_BEM | Free-surface Green function based Boundary Element Method |
| DrG_BEM | Boundary Element Method based on direct integration of the free-surface Green function |
| AlG_BEM | Boundary Element Method based on analytical solution of the free-surface Green function |
Appendix A
Appendix B
References
- Ursell, F. On the heaving motion of a circular cylinder on the surface of a fluid. Q. J. Mech. Appl. Math. 1949, 2, 218–231. [Google Scholar] [CrossRef]
- Ursell, F. Surface waves on deep water in the presence of a submerged circular cylinder I. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1950; Volume 46, pp. 141–158. [Google Scholar]
- Evans, D.V.; Linton, C.M. Active devices for the reduction in wave intensity. Appl. Ocean Res. 1989, 11, 26–32. [Google Scholar] [CrossRef]
- Bai, K.J. Diffraction of oblique waves by an infinite cylinder. J. Fluid Mech. 1975, 68, 513–535. [Google Scholar] [CrossRef]
- Garrison, C.J. Interaction of oblique waves with an infinite cylinder. Appl. Ocean Res. 1984, 6, 4–15. [Google Scholar] [CrossRef]
- Politis, C.G.; Papalexandris, M.V.; Athanassoulis, G.A. A boundary integral equation method for oblique water-wave scattering by cylinders governed by the modified Helmholtz equation. Appl. Ocean Res. 1984, 24, 215–233. [Google Scholar] [CrossRef]
- Zheng, Y.H.; Shen, Y.M.; Ng, C.O. Effective boundary element method for the interaction of oblique waves with long prismatic structures in water of finite depth. Ocean Eng. 2008, 35, 494–502. [Google Scholar] [CrossRef]
- Dean, R.G.; Ursell, F. Interaction of a Fixed, Semi-Immersed Circular Cylinder with a Train of Surface Waves; Technical Report No. 37; Hydrodynamic Lab, MIT: Cambridge, MA, USA, 1959. [Google Scholar]
- Martin, P.A.; Dixon, A.G. The scattering of regular surface waves by a fixed, half-immersed, circular cylinder. Appl. Ocean Res. 1983, 5, 13–23. [Google Scholar] [CrossRef]
- Wehausen, J.V.; Laitone, E.V. Surface waves. In Encyclopedia of Physics; Springer: Berlin, Germany, 1964; Volume 9, pp. 446–778. [Google Scholar]
- Haskind, M.D. The diffraction of waves about a moving cylindrical vessel. Prikl. Mat. Mikh. 1953, 17, 431–442. [Google Scholar]
- Newman, J.N. The approximation of free-surface Green functions. In Wave Asymptotics; Martin, P.A., Wickham, G.R., Eds.; Cambridge University Press: Cambridge, UK, 1992; pp. 107–135. [Google Scholar]
- Noblesse, F. The Green function in the theory of radiation and diffraction of regular water waves by a body. J. Eng. Math. 1982, 16, 137–169. [Google Scholar] [CrossRef]
- Telste, J.G.; Noblesse, F. Numerical evaluation of the Green Function of water-wave radiation and diffraction. J. Ship Res. 1986, 30, 69–84. [Google Scholar]
- Ponizy, B.; Noblesse, F.; Ba, M.; Guilbaud, M. Numerical evaluation of free-surface Green functions. J. Ship Res. 1994, 38, 193–202. [Google Scholar]
- Newman, J.N. An expansion of the oscillatory source potential. Appl. Ocean Res. 1984, 6, 116–117. [Google Scholar] [CrossRef]
- Newman, J.N. Algorithms for free-surface green’s function. J. Eng. Math. 1985, 19, 57–67. [Google Scholar] [CrossRef]
- Monacella, V.J. The distribution due to a slender ship oscillating in a fluid of finite depth. J. Ship Res. 1966, 10, 242–252. [Google Scholar]
- McIver, M. An example of non-uniqueness in the two-dimensional linear water wave problem. J. Fluid Mech. 1996, 315, 257–266. [Google Scholar] [CrossRef]
- Linton, C.M.; McIver, P. Handbook of Mathematical Techniques for Wave/Structure Interactions; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Yan, B.; Bai, W.; Liu, Y.; Gou, Y.; Ning, D. An analytical investigation on floating cylindrical breakwaters with different constraints. Ocean Eng. 2016. (submitted). [Google Scholar]
- Taylor, R.E.; Zietsman, J. A comparison of localized finite element formulations for two-dimensional wave diffraction and radiation problems. Int. J. Numer. Methods Eng. 1981, 17, 1355–1384. [Google Scholar] [CrossRef]
- Li, L. Numerical Seakeeping Predictions of Shallow Water Effect on Two Ship Interactions in Waves. Ph.D. Thesis, Dalhousie University, Halifax, NS, Canada, 2001. [Google Scholar]
- Liu, Y.; Hu, C.; Sueyoshi, M.; Iwashita, H.; Kashiwagi, M. Motion response prediction by hybrid panel-stick models for a semi-submersible with bracings. J. Mar. Sci. Technol. 2016. [Google Scholar] [CrossRef]
- Liu, Y.; Shigeo, Y. FinGreen3D: A Fortran code for efficiently computing free-surface Green’s kernel in finite ocean depth with application to wave-structure interaction problems by using a satisfying region-decomposition strategy. Comput. Phys. Commun. 2016. (submitted). [Google Scholar]
- Kronrod, A.S. Nodes and Weights of Quadrature Formulas-Sixteen-Place Tables: Authorized Translation from the Russian; Consultants Bureau: New York, NY, USA, 1965. [Google Scholar]
- Piessens, R.; de Doncker-Kapenga, E.; Uberhuber, C.W.; Kahaner, D.K. Quadpack: A Subroutine Package for Automatic Integration; Springer: Berlin/Heidelberg, Germany, 1983. [Google Scholar]
- Gander, W.; Gautschi, W. Adaptive Quadrature-Revisited; Technical Report 306; Department of Computer Science, ETH Zurich: Zurich, Switzerland, 1998. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | LF | LU | LL | LB | NF | NU | NL | NB |
|---|---|---|---|---|---|---|---|---|
| FSG_BEM | / | / | / | πa | / | / | / | 10 |
| RKG_BEM | 60a | 20a | 20a | πa | 240 | 90 | 90 | 30 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Gou, Y.; Teng, B.; Yoshida, S. An Extremely Efficient Boundary Element Method for Wave Interaction with Long Cylindrical Structures Based on Free-Surface Green’s Function. Computation 2016, 4, 36. https://doi.org/10.3390/computation4030036
Liu Y, Gou Y, Teng B, Yoshida S. An Extremely Efficient Boundary Element Method for Wave Interaction with Long Cylindrical Structures Based on Free-Surface Green’s Function. Computation. 2016; 4(3):36. https://doi.org/10.3390/computation4030036
Chicago/Turabian StyleLiu, Yingyi, Ying Gou, Bin Teng, and Shigeo Yoshida. 2016. "An Extremely Efficient Boundary Element Method for Wave Interaction with Long Cylindrical Structures Based on Free-Surface Green’s Function" Computation 4, no. 3: 36. https://doi.org/10.3390/computation4030036
APA StyleLiu, Y., Gou, Y., Teng, B., & Yoshida, S. (2016). An Extremely Efficient Boundary Element Method for Wave Interaction with Long Cylindrical Structures Based on Free-Surface Green’s Function. Computation, 4(3), 36. https://doi.org/10.3390/computation4030036