1. Introduction
There are two main types of construction projects. The first one covers projects consisting of non-repetitive activities. Such projects are often scheduled using network methods, such as Critical Path Method (CPM). The second type comprises Repetitive Construction Projects (RCP) that involve sets of activities to be reproduced in a number of work zones (i.e., units and locations).
If the amount of activity-related work in each work zone is the same, the projects are referred to as ‘Repetitive Linear Projects’. However, in the practice of construction works, quantities of work typically differ from zone to zone. Examples are the erection of a set of housing blocks of the same type of structural frame and the same finishes but different in shape and size, or the construction of a multi-span bridge where the spans are of different lengths; such projects are often referred to as Repetitive Non-linear Projects [
1,
2,
3,
4].
In the process of modeling the RCP, the progress of works in work zones can be expressed by either discrete or continuous numbers [
3,
4]. For instance, the progress of erection of tall buildings, where particular crews conduct their work in a fixed sequence of consecutive floors, is conveniently expressed by a discrete number of completed work zones (i.e., floors). In other cases, work progress is measured in natural units such as kilometers of highway or pipeline.
Many researchers question the applicability of network methods, including the CPM, in scheduling repetitive construction projects. The critical path method can theoretically be used to schedule any type of project. However, its network model presents only task precedence relations that result primarily from technological limitations. Organizational conditions, such as resource allocation, are not modeled flexibly enough to enable the planner to analyze the consequences of resource availability constraints or to ensure the continuous utilization of resources and continuous work in work zones. With CPM, repetitive processes in subsequent work zones are modeled as separate individual tasks connected by precedence relations. This makes the task list long and the network model unnecessarily complicated and difficult to manage. In the case of practical problems, any modification to the model, such as introducing additional constraints or modifying the objective function, leads to a higher degree of problem complexity.
Therefore, a number of RCP-dedicated methods have been developed, and their analyses compared [
2,
3]. Almost all of them are based on the assumption of identical work zones. In practice, dividing the scope of a construction project into identical work zones is rarely possible, as they naturally differ, to smaller or larger extents, in the amount of work.
Most frequently, the RCP methods are aimed only at assuring continuous work for the crews [
1]. Indeed, the continuity of crew work is of key importance in construction as it helps to retain skilled labor, make the most of the learning effect, reduce unproductive time, and thus cut direct costs. However, while striving for such continuity, the scheduler must be prepared to compromise on the overall duration of the project [
3].
The buildings and their parts (units, work zones) might be, in many cases, erected in any sequence, but the sequence affects both the cost and the duration of the project. RCP scheduling methods that allow the planner to determine the optimal order of units are rare. Moreover, most of them assume that relations between processes—modeling technological precedence and indicating the order in which crews move from one unit to the next—cannot be changed (i.e., they are hard relations).
Determining the best schedule and sequence of work has been the focus of operational research, discrete optimization and combinatorial programming, especially in industrial engineering. The problem of scheduling RCP is similar to the flow shop problem in industrial production. The buildings under construction correspond to jobs, the crews correspond to machines and the processes executed by the crews correspond to operations [
5].
The following different variants of the permutation flow shop problem may be applicable to scheduling repetitive construction projects:
The regular permutation flow shop problem for determining the minimum project duration (here, the continuity of crew work and the continuity of work in work zones are not the focus) [
6];
The no-wait flow shop problem [
7,
8,
9] where the focus is on the continuity of work in work zones;
The no-idle flow shop problem [
10,
11] to assure continuous work of the crews.
The existing methods of solving the permutation flow shop problems, if to be used in scheduling repetitive projects in construction, need some adaptation [
5,
12,
13,
14].
The construction scheduling methods that rest upon the flow shop algorithms come under many names, such as Stream Methods [
15] and Time Coupling Methods (TCM) [
16], to mention only those developed in Poland over the last few decades.
To solve the permutation flow shop problem, a variety of algorithms were put forward, some based on the branch-and-bound method, some using heuristic and metaheuristic approaches. The problem can also be solved by the algorithms of the Asymmetric Traveling Salesman Problem (ATSP) [
10,
11,
17], originated in the 1930s.
This study aims to develope a mathematical model facilitating the scheduling of construction projects under the constraint of continuity of work in work zones and to keep the project duration to a minimum, whilst allowing for other constraints deemed important in the practice of construction.
If the project consists of erecting a complex of buildings for different clients, then the sooner a building is completed, the sooner it can be handed over to the client and paid for. Assuming that the contractor is paid on completion of a building, optimizing the sequence of handing-over means increasing the project’s economic efficiency for the contractor. Moreover, if particular buildings are completed quicker, some indirect costs are reduced. Similarly, the investor can start using the facility (or selling or renting either the facility or individual apartments) more quickly and achieve earlier revenues, covering the expenses incurred at the initial stages of the investment project.
The optimization problem—minimizing project duration under the constraint of continuity of work in buildings—has been transformed into the ATSP. In addition, a fixed partial order in the permutation of the sequence of buildings (projects from the portfolio) can be taken into consideration. Such a requirement is due to the fact that the buildings often cannot be completed in any sequence, since the layout of the whole complex may pose additional constraints as some buildings would not be accessible unless other buildings are finished. This issue was disregarded in the existing methods of scheduling repetitive projects.
Moreover, the approach of the Asymmetric Traveling Salesman Problem with Time Windows (ATSPTW) provides an opportunity to develop the proposed approach for another optimization problem—namely, scheduling contractor’s project portfolios. The projects in the portfolio cannot be entirely scheduled at the contractor’s will: while some clients may allow the contractor to put forward the time for completion, others are likely to define the due date themselves.
Considering the above, the authors aim at formulating a model that describes a project consisting of the erection of multiple, non-identical buildings (units, work zones). The model enables the planner to find a schedule that minimizes the overall duration of the project, allows the contractor to complete particular work zones (i.e., buildings) as soon as possible (without idle time), and, at the same time, conforms to a predefined sequence of some buildings. The aim of the paper is not to develop a new algorithm to solve the optimization problem, but to formulate a model in a way that allows the user to solve it using existing tools.
The remainder of the paper is organized as follows:
Section 2 presents the existing methods employed to solve the model;
Section 3 presents assumptions for the model and its mathematical formulation, illustrating the analysis with a numerical example;
Section 4 summarizes the findings and points to directions for further research.
2. Methods
Practical construction scheduling rests mostly upon the experience of planners, who sometimes use the Line of Balance or network model-based software equipped with some algorithms for minimizing the duration and indicating/solving resource availability conflicts. This approach may be sufficient in the case of relatively simple projects. However, finding an optimal schedule for a project conducted in less typical conditions and under specific constraints calls for applying Operations Research (OR) methodology.
OR facilitates solving quantitative decision problems by creating and analyzing mathematical models that represent the performance of real systems. The main phases for OR methodology are: defining the problem, constructing the model, solving and validating the model, verifying the results, and implementing the solution [
18,
19].
To construct the model, it is necessary to identify all key components that contribute to the performance of the system to be optimized. The mathematical model comprises equations and related mathematical expressions that describe the essence of a problem by decision variables (that affect the performance of the system), parameters of the model (that capture the system’s properties), the objective function (appropriate measure of system performance), and constraints (any restrictions on the decision variables values).
As the model needs to reflect the character of the problem precisely, it is naturally unique and specific to the practical case it represents. However, some generalization is possible so that it can be applied to solving similar cases. This work puts forward such a framework model of RCP: its objective is fixed—minimizing project duration under the constraint of continuous work in the locations—and its adaptation to a particular case consists in providing case-specific parameter values.
In OR, there is no single general technique to solve all mathematical models—the type and complexity of the model dictate the nature of the solution method. In the analyzed case, the model is based on a widely known linear program of the ATSP with binary variables. The ATSP is non-deterministic polynomial-time (NP)-hard. A number of exact and approximate algorithms have been proposed to solve it. The exact methods of solving the ATSP are based on the branch-and-bound technique (as, among others, in references [
20,
21,
22]. Since the problem is similar to the model of the assignment problem, it can be solved with the algorithm proposed by R. L. Ackoff and M. Sasieni R. L. (the so-called ‘Hungarian algorithm’) and the algorithm by J. Munkres [
18,
19]. If the solution does not contain sub-cycles, then it is considered optimal. Sub-cycles can be eliminated using the procedure proposed by W.L. Eastman [
18,
19]. Given the space of feasible solutions with a size of
n! (where:
n is the number of work zones), the computational complexity of exact algorithms restricts their applicability. For this reason, heuristic and metaheuristics algorithms have been formulated and applied as well [
23,
24,
25,
26,
27,
28,
29,
30,
31,
32].
To account for the time constraints for the construction of particular buildings, the problem under consideration may be transformed into an ATSPTW. A number of accurate, heuristic, and metaheuristic algorithms were developed to solve an ATSPTW [
33,
34,
35,
36,
37,
38], including cases that assume non-deterministic conditions [
39,
40].
3. Results
3.1. Problem Definition
Let us assume that the project involves a complex construction process to be conducted in n heterogeneous (non-uniform) work zones. This complex process was divided into simpler processes to be conducted by particular construction crews. The crews are of fixed composition in terms of qualification and the number of workers. The crews move from work zone to work zone in a fixed sequence.
There is either no direct proportion between the area of a work zone and the workload (so the duration of a particular process differs zone to zone) or, if such a relationship occurs, it varies between the processes.
The objective is to construct a project schedule of the shortest duration. The duration is affected by the sequence in which the work zones are taken over by the crews and the duration of individual processes. Fast execution of a process in a work zone requires that the available workspace is utilized to the maximum: the number of workers in a crew should be as high as technically viable for a work zone of the least work load.
For each work zone
i (
), the set of processes
j (
) is to be conducted in a fixed order. The duration of the processes carried out by a construction crew
j in work zone
i is
. The start date of the first process in the first work zone is set to 0 (
) (
Figure 1).
Condition (1) determines the minimum period
between the start of the first process conducted by the first construction crew in the subsequent work zones,
u and
v. The minimum period
can be calculated as follows [
2]:
The aim is to determine a permutation of the work zones that minimizes the project duration. The duration of all processes in all work zones can be determined according to the following formula:
3.2. Mathematical Model of the Problem
In this study, the problem was modeled by analogy to the ATSP formulation. Let be a directed graph where is a set of the graph nodes (the work zones), and is the set of arcs linking the nodes.
For each possible combination of pairs, let us determine
, i.e., the project duration increment with the assumption of the processes being first started in work zone
u and then continued in work zone
v:
where
M is a sufficiently large number.
The values can be compiled in a square matrix which corresponds to the distance (time) matrix in the traveling salesman problem:
The problem of minimizing the crews’ idle time under the constraint of continuous work in the work zones can be reduced to the TSP (searching for the Hamiltonian minimum cycle) by introducing a dummy work zone (node
n + 1) linked with the arcs
, for which the following applies:
The problem of determining the optimal sequence is expressed as follows:
where:
Conditions (7)–(8) assure that the path is going through all graph nodes, including the dummy node. Conditions (9)–(11) assure that the path includes only one cycle. The variables represent the sequence of the nodes along the closed path.
3.3. Additional Constraints
By modifying the model parameters, the user is able to account for additional constraints. For instance, the constraints may consist in setting a particular work zone to be first, or in enforcing a particular subset of work zones to be developed in a predefined order.
A prerequisite that the works start in a particular work zone
may be dictated by financial considerations (to complete the most profitable work first) or by the demand of the client. In the presence of such a constraint, the data in matrix
C are modified as follows:
It is also possible to modify the model by additional constraints in the following form:
The need to conduct works in a set of zones in a predefined order may arise from the project logic (e.g., erection of consecutive floors in a multi-story building, the floors being work zones) or operating considerations (commissioning particular buildings according to defined milestones). In such circumstances, the data of matrix C are to be modified as follows:
- (a)
Remove the rows and columns numbered from the matrix;
- (b)
Change the remaining values as follows: , , and .
The problem of scheduling projects with predefined time windows of continuous development of work zones is more complex. Assuming deterministic conditions, with durations of all processes in individual work zones treated as certain, the time constraints can be the work completion dates. In the ATSP, the time windows correspond to the time intervals of the traveling salesman’s ‘visits’ in the particular ‘locations’ (i.e., the graph nodes). This modification of the problem is referred to as ATSPTW.
3.4. Example
Let us define the matrix of durations of four processes to be conducted in six work zones (for example, buildings that can be sold as soon as they are completed):
The minimum period between the start of processes,
, calculated according to Formula (1), is:
The elements of matrix
C (the project duration increments with the development of processes first in work zone
u and subsequently in work zone
v), determined by relations (3)–(5), are:
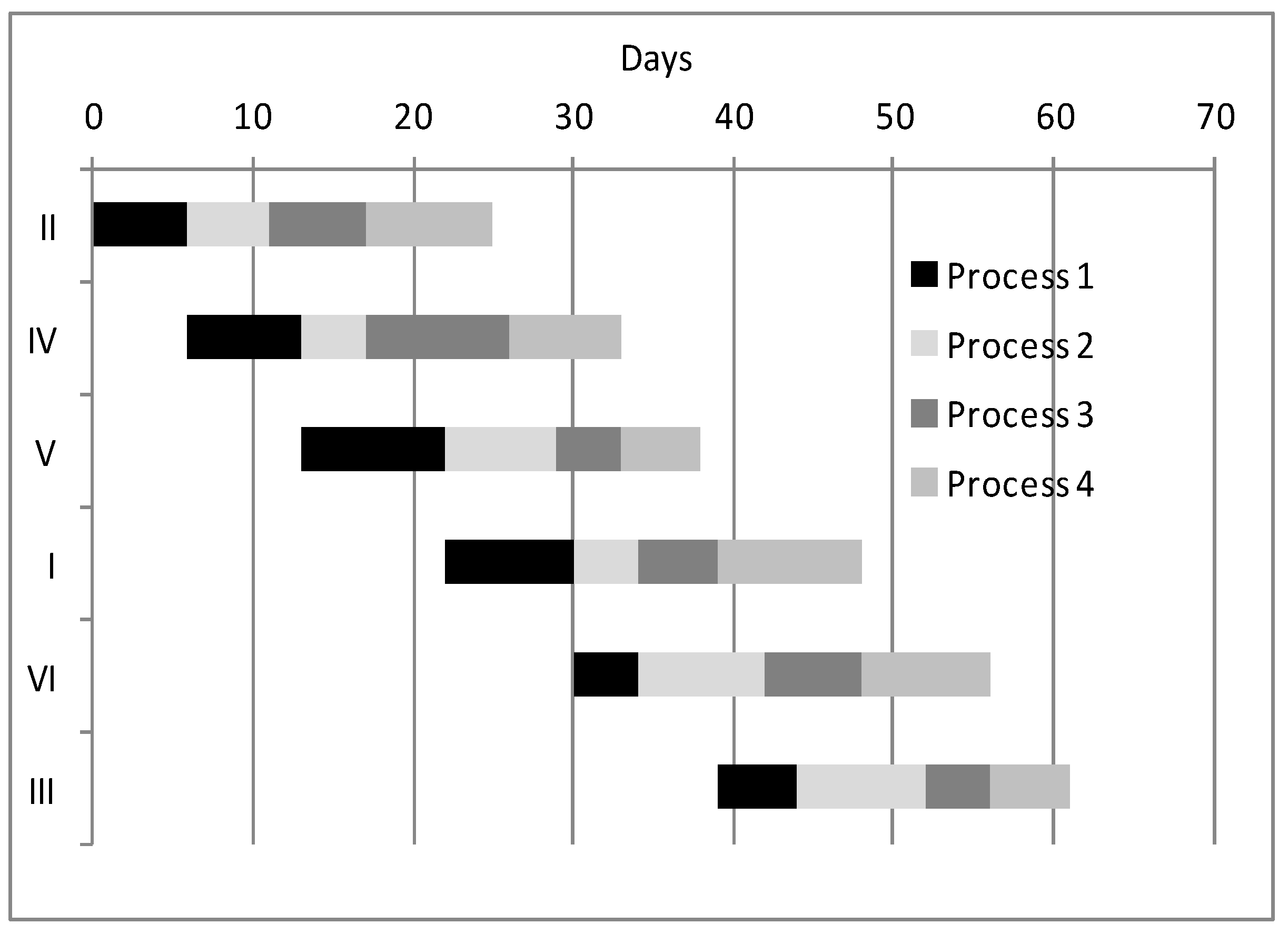
The example was solved with LINGO 14.0. The optimal sequence of the work zones (excluding the dummy work zone no. 7 from the optimal cycle) was: .
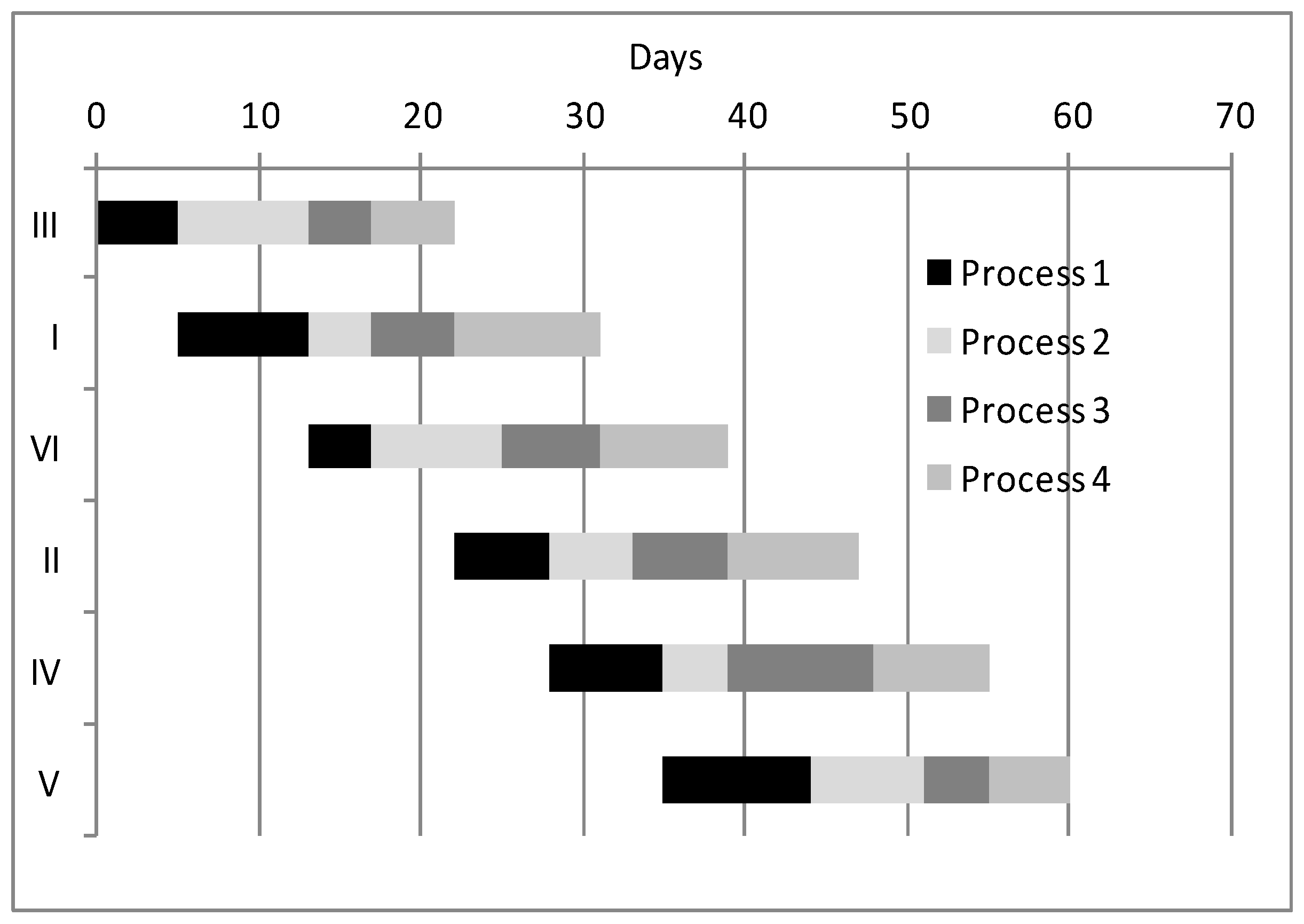
Figure 2 presents the project schedule for the work zones in the optimal sequence (total duration 60 days, thus 8 days shorter than in the case of a schedule with the sequence of work zones corresponding to their initial numbering).
Ignoring the requirement for the continuity of work in work zones, the algorithm prompts the optimal sequence of , with a minimum duration of 59 days. Thus, the no-wait approach and minimizing duration of work in buildings result in the longer overall duration of the project.
The longest duration of 72 days with no-wait constraints corresponds to the following sequence: . Therefore, in this particular case, the proposed approach enabled the planner to reduce the project duration by 16.7%.
Figure 3 shows a schedule of the minimum duration under an additional constraint: the crews are to start the work in zone IV (with the optimum sequence of zones being
and a project duration of 62 days).
Figure 4 shows a schedule constructed under the assumption that, following the work in zone IV, the crews are to start the work in zone V and follow with zone I (with the optimal sequence of zones being
and a project duration of 61 days). As expected, adding more constraints results in increased project duration. In the example, the increase is small but, in real life, it is likely to be significant and may affect indirect costs that are proportional to the project duration.
4. Conclusions
The ability to prepare or update a schedule of construction works in a way that assures continuity of work and reduces the project duration may provide a significant competitive advantage to a contractor as it reduces the production cycle and demand for the contractor’s working capital. Moreover, construction clients typically insist on shortening the construction stage, anticipating the benefits of the operation phase, and use the time for completion as a criterion in bid assessment. Contractors that are able to find ways of delivering work quicker are more likely to get orders.
The model enables the planner to determine the sequence of buildings (i.e., units or work zones) that minimizes the overall project duration under additional constraints; a particular building (unit, work zone) may be required to be completed first, or some buildings (units, work zones) may have to be delivered in a particular order. Additional constraints of this kind have not been taken into account in existing RCP scheduling methods so far. Moreover, most of the existing methods, in contrast to the proposed approach, are not applicable to the scheduling of multi-facility projects in a way that reduces the completion time of particular buildings by enforcing continuous work in buildings.
Additional constraints that arise from specific conditions of a project increase the project duration. Therefore, it is advisable to account for these constraints while scheduling the project and while optimizing the schedule for project duration minimization.
The proposed method of optimizing schedules with work continuity constraints reduces the permutational problem of sequencing to an ATSP, a problem sufficiently elaborated on in the operational research literature. The advantage of the method is that it can be implemented using widely available software. Adding constraints (e.g., setting a particular work zone to be completed first) is easily performed by modifying the model parameters. Moreover, the problem with time windows can be solved using ready-made ATSPTW algorithms.
However, to support the practitioners in constructing better schedules, the authors intend to develop a scheduling tool based on the proposed model. The proposed approach is deterministic. Construction processes are carried out in a risky environment, which renders deterministic models unreliable. Therefore, the direction of further research will involve increasing the model’s robustness by accounting for variability of project conditions by allocating time buffers.


{kind=link}
{kind=link}
{kind=link}
{kind=link}



