Adhesion of Soft Materials to Rough Surfaces: Experimental Studies, Statistical Analysis and Modelling

 ,
, 
Abstract
:1. Introduction
2. Preliminaries
2.1. Statistical Description of Rough Surfaces
2.1.1. Non-Adhesive Contact between Rough Elastic Solids
2.1.2. Adhesive Contact between Rough Elastic Solids
3. Statistical Analysis of Experimental Surface Topography Data
3.1. Normality Tests
3.1.1. The KS Test
3.1.2. The LF Test
3.1.3. The AD Test
3.1.4. The CVM Test
3.1.5. The SW Test
3.1.6. The Pearson Test
3.1.7. The SF Test
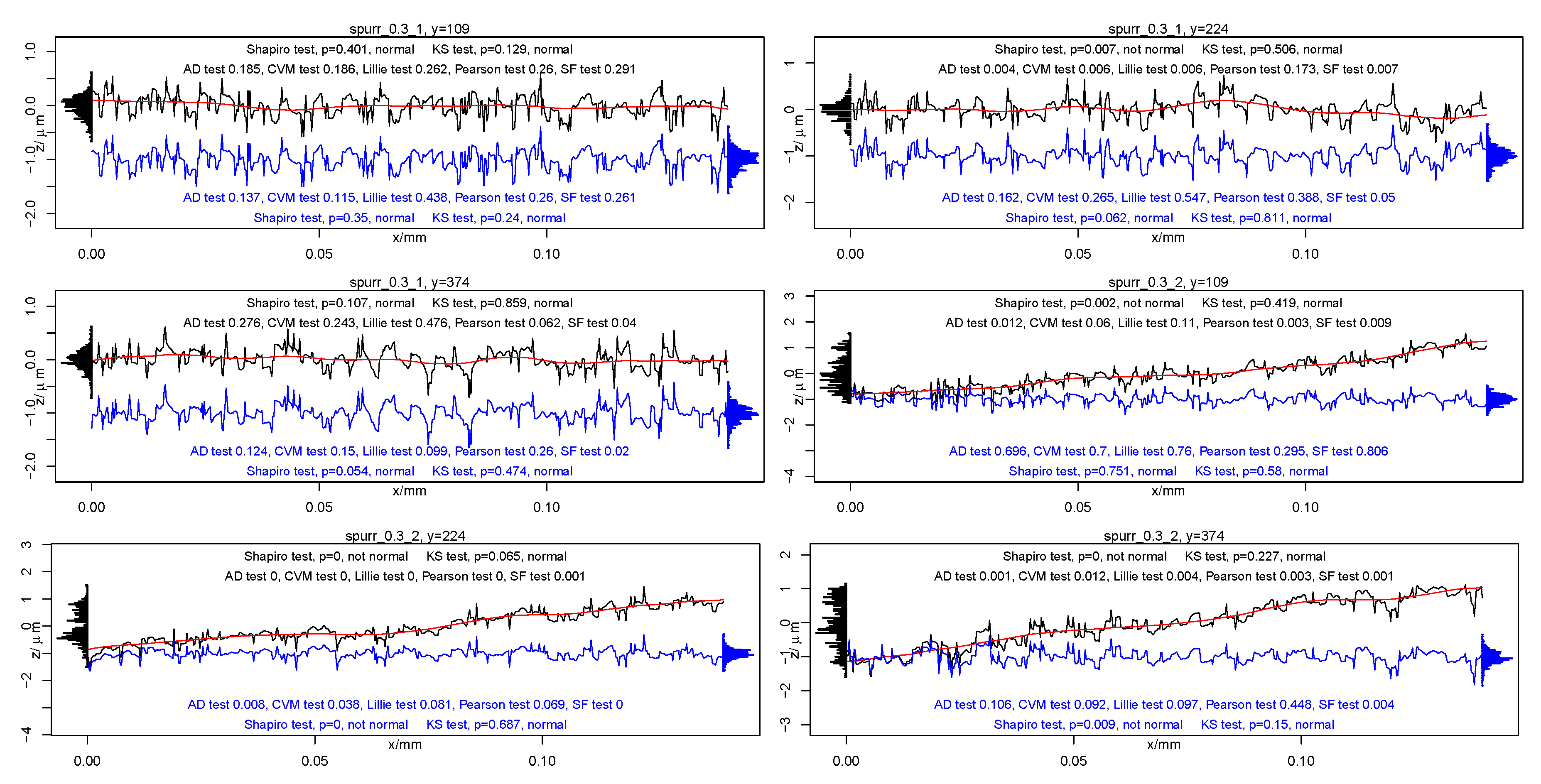
3.2. Results of the Normality Testing
4. The Indentation Tests of Epoxy Resin Replicas and Theoretical Modelling
4.1. Experimental Data Obtained by DSI
4.1.1. Modelling of Surfaces as Random Process Graphs
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kendall, K. Molecular Adhesion and Its Applications; Kluwer Academic/Plenum Publishers: New York, NY, USA, 2001. [Google Scholar]
- Eichler-Volf, A.; Kovalev, A.; Wedeking, T.; Gorb, E.V.; Xue, L.; You, C.; Piehler, J.; Gorb, S.N.; Steinhart, M. Bioinspired monolithic polymer microsphere arrays as generically anti-adhesive surfaces. Bioinspir. Biomim. 2016, 11, 025002. [Google Scholar] [CrossRef] [PubMed]
- Fuller, K.N.G.; Tabor, D. The effect of surface roughness on the adhesion of elastic solids. Proc. R. Soc. Lond. A 1975, 345, 327–342. [Google Scholar] [CrossRef]
- Gorb, E.; Haas, K.; Henrich, A.; Enders, S.; Barbakadze, N.; Gorb, S. Composite structure of the crystalline epicuticular wax layer of the slippery zone in the pitchers of the carnivorous plant Nepenthes alata and its effect on insect attachment. J. Exp. Biol. 2005, 208, 4651–4662. [Google Scholar] [CrossRef] [PubMed]
- Purtov, J.; Gorb, E.V.; Steinhart, M.; Gorb, S.N. Measuring of the hardly measurable: adhesion properties of anti-adhesive surfaces. Appl. Phys. A 2013, 111, 183–189. [Google Scholar] [CrossRef]
- Gorb, E.; Purtov, J.; Gorb, S. Adhesion force measurements on the two wax layers of the waxy zone in Nepenthes alata pitchers. Sci. Rep. 2014, 4, 5154. [Google Scholar] [CrossRef] [PubMed]
- Borodich, F.M.; Galanov, B.A.; Gorb, S.N.; Prostov, M.I.; Prostov, Y.I.; Suarez-Alvarez, M.M. Evaluation of adhesive and elastic properties of materials by depth-sensing indentation of spheres. Appl. Phys. A Mater. Sci. Process. 2012, 108, 13–18. [Google Scholar] [CrossRef]
- Borodich, F.M.; Galanov, B.A.; Gorb, S.N.; Prostov, M.Y.; Prostov, Y.I.; Suarez-Alvarez, M.M. Evaluation of adhesive and elastic properties of polymers by the BG Method. Macromol. React. Eng. 2013, 7, 555–563. [Google Scholar] [CrossRef]
- Jiao, Y.; Gorb, S.; Scherge, M. Adhesion measured on the attachment pads of Tettigonia viridissima (Orthoptera, insecta). J. Exp. Biol. 2000, 203, 1887–1895. [Google Scholar] [PubMed]
- Perepelkin, N.V.; Kovalev, A.E.; Gorb, S.N.; Borodich, F.M. Estimation of the elastic modulus and the work of adhesion of soft materials using the extended Borodich-Galanov (BG) method and depth sensing indentation. Mech. Mater. 2018, in press. [Google Scholar]
- Galanov, B.A. Models of adhesive contact between rough elastic bodies. Int. J. Mech. Sci. 2011, 53, 968–977. [Google Scholar] [CrossRef]
- Goryacheva, I.G. Contact Mechanics in Tribology; Kluwer: Dordreht, The Nederlands, 1997. [Google Scholar]
- Khusu, A.P.; Vitenberg, Y.R.; Palmov, V.A. Roughness of Surfaces: Theoretical Probabilistic Approach; Nauka: Moscow, Russia, 1975. [Google Scholar]
- Whitehouse, D.J.; Archard, J.F. The properties of random surfaces of significance in their contact. Proc. R. Soc. Lond. 1970, 316, 97–121. [Google Scholar] [CrossRef]
- Maugis, D. Contact, Adhesion and Rupture of Elastic Solids; Springer: Berlin, Germany, 2000. [Google Scholar]
- Nowicki, B. Multiparameter representation of surface roughness. Wear 1985, 102, 161–176. [Google Scholar] [CrossRef]
- Whitehouse, D.J. The parameter rash—Is there a cure? Wear 1982, 83, 75–78. [Google Scholar] [CrossRef]
- Abbott, E.J.; Firestone, F.A. Specifying surface quality: A method based on accurate measurement and comparison. Mech. Eng. 1933, 55, 569–572. [Google Scholar]
- Meetings of the Town’s Mathematical Seminar in Leningrad. Uspekhi Mat. Nauk 1954, 9, 255–256. (In Russian)
- Linnik, Y.V.; Khusu, A.P. Mathematical and statistical description of unevenness of surface profile at grinding. Bull. USSR Acad. Sci. Div. Tech. Sci. 1954, 20, 154–159. (In Russian) [Google Scholar]
- Borodich, F.M.; Pepelyshev, A.; Savencu, O. Statistical approaches to description of rough engineering surfaces at nano and microscales. Tribol. Int. 2016, 103, 197–207. [Google Scholar] [CrossRef] [Green Version]
- Zhuravlev, V.A. On question of theoretical justification of the Amontons-Coulomb law for friction of unlubricated surfaces. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2007, 221, 894–898. [Google Scholar] [CrossRef]
- Kragelsky, I.V. Static friction between two rough surfaces. Bull. USSR Acad. Sci. Div. Tech. Sci. 1948, 10, 1621–1625. (In Russian) [Google Scholar]
- Borodich, F.M. Translation of Historical Paper. Introduction to V A Zhuravlev’s historical paper: ‘On the question of theoretical justification of the Amontons-Coulomb law for friction of unlubricated surfaces’. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2007, 221, 893–898. [Google Scholar]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. A 1966, 370, 300–319. [Google Scholar] [CrossRef]
- Greenwood, J.A. Surface modelling in tribology. In Applied Surface Modelling; Creasy, C.F.M., Craggs, C., Eds.; Ellis Horwood: New York, NY, USA, 1990; pp. 61–75. [Google Scholar]
- Polonsky, I.A.; Keer, L.M. Scale effects of elastic-plastic behavior of microscopic asperity contacts. J. Tribol. Trans. ASME 1996, 118, 335–340. [Google Scholar] [CrossRef]
- Polonsky, I.A.; Keer, L.M. Simulation of microscopic elastic-plastic contacts by using discrete dislocations. Proc. R. Soc. A 1996, 452, 2173–2194. [Google Scholar] [CrossRef]
- Borodich, F.M.; Savencu, O. Hierarchical models of engineering rough surfaces and bioinspired adhesives. In Bio-Inspired Structured Adhesives; Heepe, L., Gorb, S., Xue, L., Eds.; Springer: Berlin, Germany, 2017. [Google Scholar]
- Johnson, K.L. Non-Hertzian contact of elastic spheres. The mechanics of the contact between deformable bodies. In Proceedings of the IUTAM Symposium; De Pater, A.D., Kalker, J.J., Eds.; Delft University Press: Delft, The Nederland, 1975; pp. 26–40. [Google Scholar]
- Fuller, K. Effect of surface roughness on the adhesion of elastomers to hard surfaces. Mater. Sci. Forum 2011, 662, 39–51. [Google Scholar] [CrossRef]
- Carpick, R.W. The contact sport of rough surfaces. Science 2018, 359, 38. [Google Scholar] [CrossRef] [PubMed]
- Borodich, F.M. Fractal Contact Mechanics. In Encyclopedia of Tribology; Wang, Q.J., Chung, Y.-W., Eds.; Springer: Berlin, Germany, 2013; Volume 2, pp. 1249–1258. [Google Scholar]
- Borodich, F.M.; Mosolov, A.B. Fractal roughness in contact problems. PMM J. Appl. Math. Mech. 1992, 56, 681–690. [Google Scholar] [CrossRef]
- Borodich, F.M.; Onishchenko, D.A. Fractal roughness for problem of contact and friction (the simplest models). J. Frict. Wear 1993, 14, 452–459. [Google Scholar]
- Borodich, F.M.; Onishchenko, D.A. Similarity and fractality in the modelling of roughness by a multilevel profile with hierarchical structure. Int. J. Solids Struct. 1999, 36, 2585–2612. [Google Scholar] [CrossRef]
- Borodich, F.M. Similarity properties of discrete contact between a fractal punch and an elastic medium. Comptes Rendus L’Académie Sci. 1993, 316, 281–286. [Google Scholar]
- Borodich, F.M.; Galanov, B.A. Self-similar problems of elastic contact for non-convex punches. J. Mech. Phys. Solids 2002, 50, 2441–2461. [Google Scholar] [CrossRef]
- Borodich, F.M. Parametric homogeneity and non-classical self-similarity. I. Mathematical background. Acta Mech. 1998, 131, 27–45. [Google Scholar] [CrossRef]
- Borodich, F.M. Parametric homogeneity and non-classical self-similarity. II. Some applications. Acta Mech. 1998, 131, 47–67. [Google Scholar] [CrossRef]
- Galanov, B.A.; Valeeva, I.K. Sliding adhesive contact of elastic solids with stochastic roughness. Int. J. Eng. Sci. 2016, 101, 64–80. [Google Scholar] [CrossRef]
- Galanov, B.A. Spatial contact problems for rough elastic bodies under elastoplastic deformations of the unevenness. PMM J. Appl. Math. Mech. 1984, 48, 750–757. [Google Scholar] [CrossRef]
- Borodich, F.M.; Galanov, B.A.; Perepelkin, N.V.; Prikazchikov, D.A. Adhesive contact problems for a thin elastic layer: Asymptotic analysis and the JKR theory. Math. Mech. Solids 2018. [Google Scholar] [CrossRef]
- Borodich, F.M. The Hertz-type and adhesive contact problems for depth-sensing indentation. Adv. Appl. Mech. 2014, 47, 225–366. [Google Scholar]
- Borodich, F.M.; Galanov, B.A. Non-direct estimations of adhesive and elastic properties of materials by depth-sensing indentation. Proc. R. Soc. A 2008, 464, 2759–2776. [Google Scholar] [CrossRef] [Green Version]
- Thode, H.C. Testing for Normality; Marcel Dekker: New York, NY, USA, 2002. [Google Scholar]
- Johnson, K.L.; Kendall, K.; Roberts, A.D. Surface energy and the contact of elastic solids. Proc. R. Soc. Lond. A 1971, 324, 301–313. [Google Scholar] [CrossRef]
- Rabotnov, Y.N. Elements of Hereditary Solid Mechanics; Mir Publishers: Moscow, Russia, 1980. [Google Scholar]
- Kovalev, A.; Sturm, H. Polymer Adhesion. In Encyclopedia of Tribology; Wang, Q.J., Chung, Y.-W., Eds.; Springer: Berlin, Germany, 2013; pp. 2551–2556. [Google Scholar]
- Myshkin, N.; Kovalev, A. Adhesion and surface forces in polymer tribology—A review. Friction 2018, 6, 143–155. [Google Scholar] [CrossRef] [Green Version]
- Derjaguin, B.V.; Krotova, N.A.; Smilga, V.P. Adhesion of Solids; Consultants Bureau: New York, NY, USA, 1978. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal Size of Surface Asperities (m) | (m) | (m) | (m) |
|---|---|---|---|
| 0 | |||
| 1 | |||
| 3 | |||
| 9 | |||
| 12 |
| Nominal Size of Surface Asperities (m) | [N/m] | [mN] | [mN] |
|---|---|---|---|
| 1 | |||
| 3 | |||
| 9 | |||
| 12 |
| Nominal Size of Surface Asperities (m) | N | [] | R (m) | () | [N] | |
|---|---|---|---|---|---|---|
| 1975 | ||||||
| 1 | 1213 | |||||
| 3 | 153 | |||||
| 9 | ||||||
| 12 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pepelyshev, A.; Borodich, F.M.; Galanov, B.A.; Gorb, E.V.; Gorb, S.N. Adhesion of Soft Materials to Rough Surfaces: Experimental Studies, Statistical Analysis and Modelling. Coatings 2018, 8, 350. https://doi.org/10.3390/coatings8100350
Pepelyshev A, Borodich FM, Galanov BA, Gorb EV, Gorb SN. Adhesion of Soft Materials to Rough Surfaces: Experimental Studies, Statistical Analysis and Modelling. Coatings. 2018; 8(10):350. https://doi.org/10.3390/coatings8100350
Chicago/Turabian StylePepelyshev, Andrey, Feodor M. Borodich, Boris A. Galanov, Elena V. Gorb, and Stanislav N. Gorb. 2018. "Adhesion of Soft Materials to Rough Surfaces: Experimental Studies, Statistical Analysis and Modelling" Coatings 8, no. 10: 350. https://doi.org/10.3390/coatings8100350
APA StylePepelyshev, A., Borodich, F. M., Galanov, B. A., Gorb, E. V., & Gorb, S. N. (2018). Adhesion of Soft Materials to Rough Surfaces: Experimental Studies, Statistical Analysis and Modelling. Coatings, 8(10), 350. https://doi.org/10.3390/coatings8100350