A Sub-50 µm2, Voltage-Scalable, Digital-Standard-Cell-Compatible Thermal Sensor Frontend for On-Chip Thermal Monitoring


Abstract
:1. Introduction
2. Proposed Temperature Sensor Design
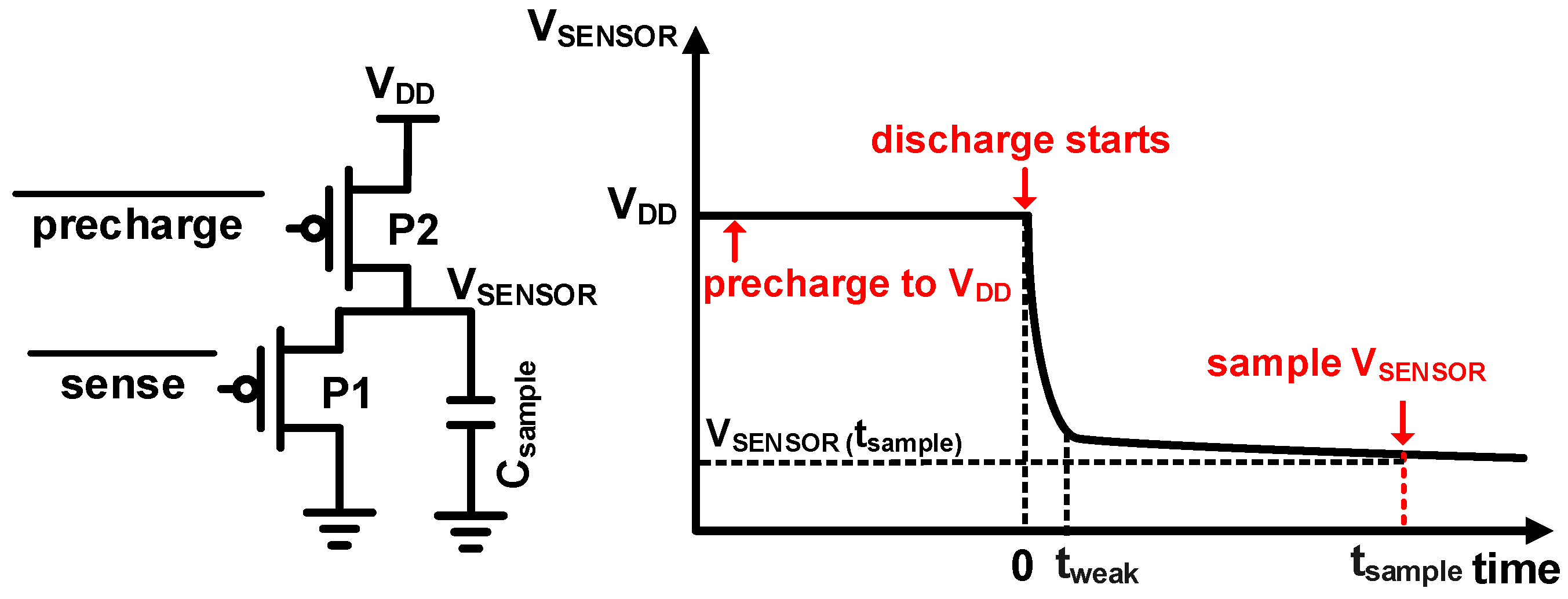
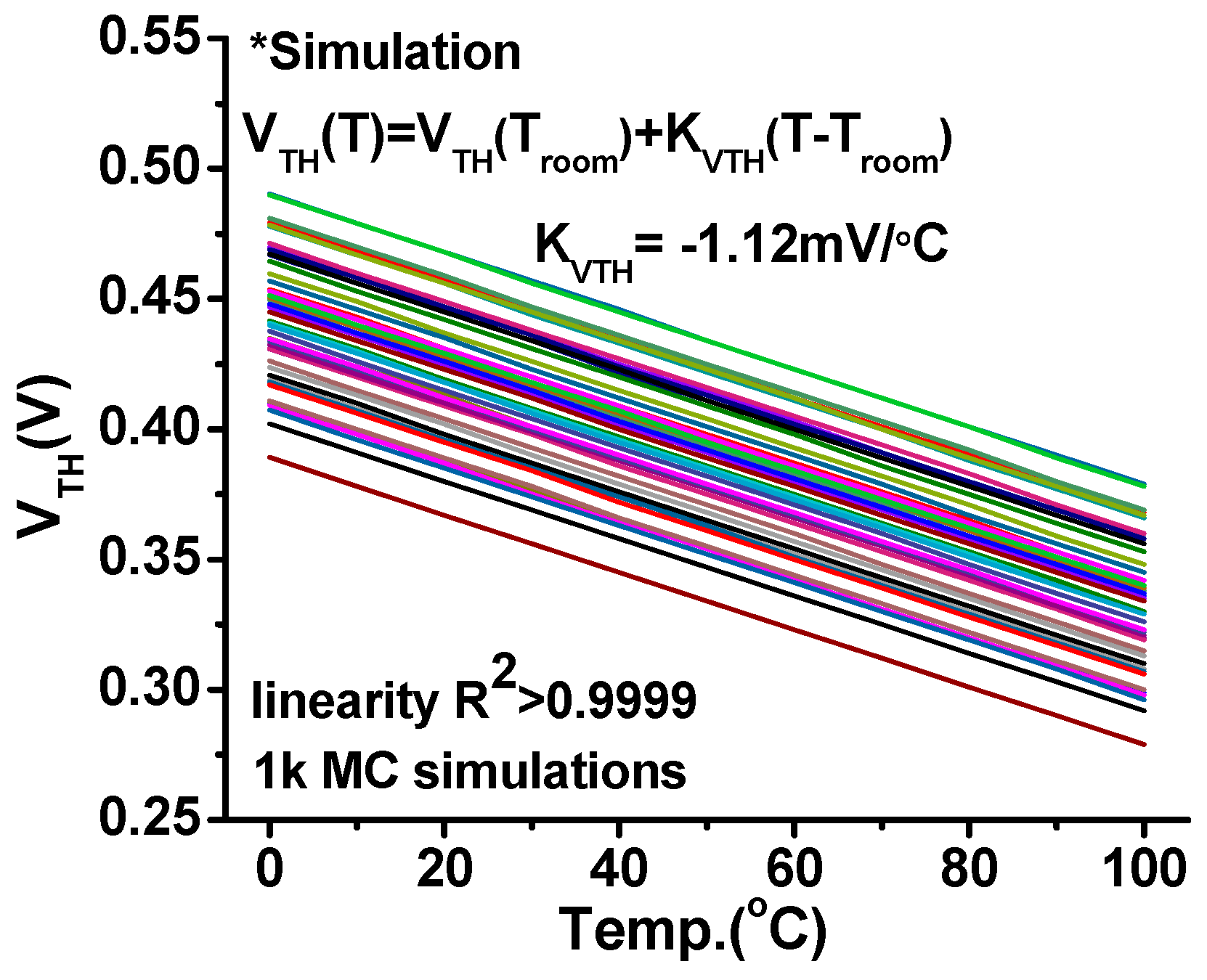
2.1. Operating Principle
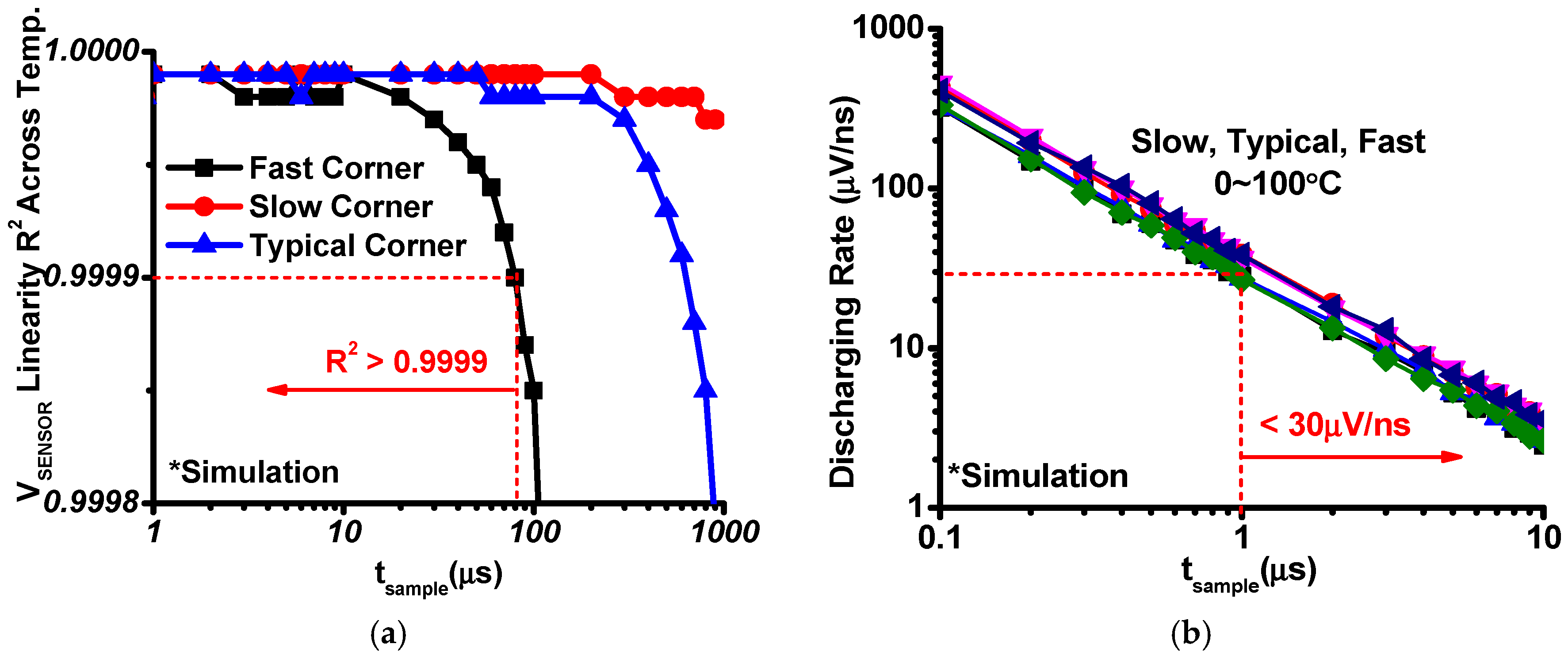
2.2. Optimal tsample
2.3. Pre-Charge Level Variation
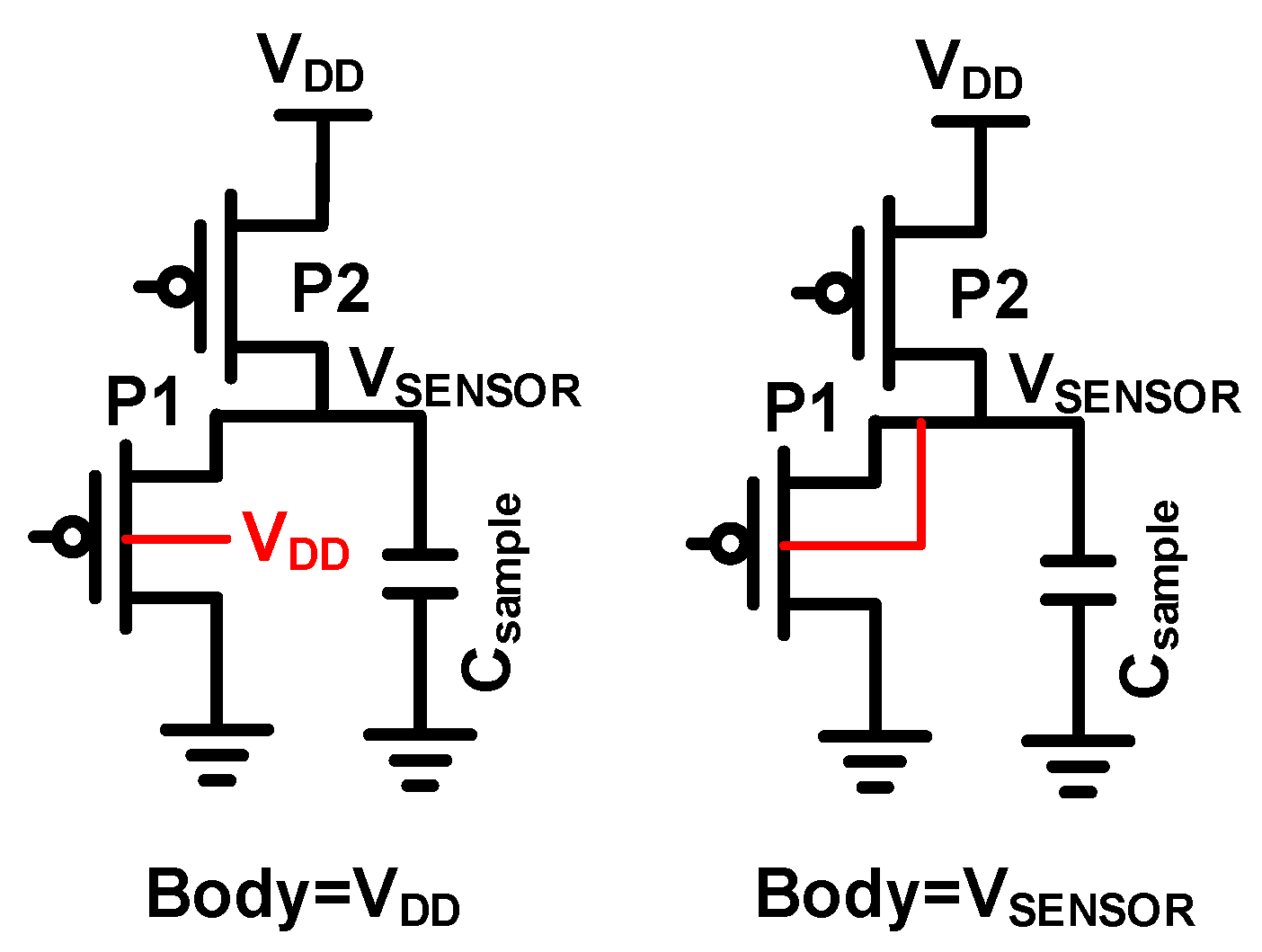
2.4. Sensor Device Type and Body Connection
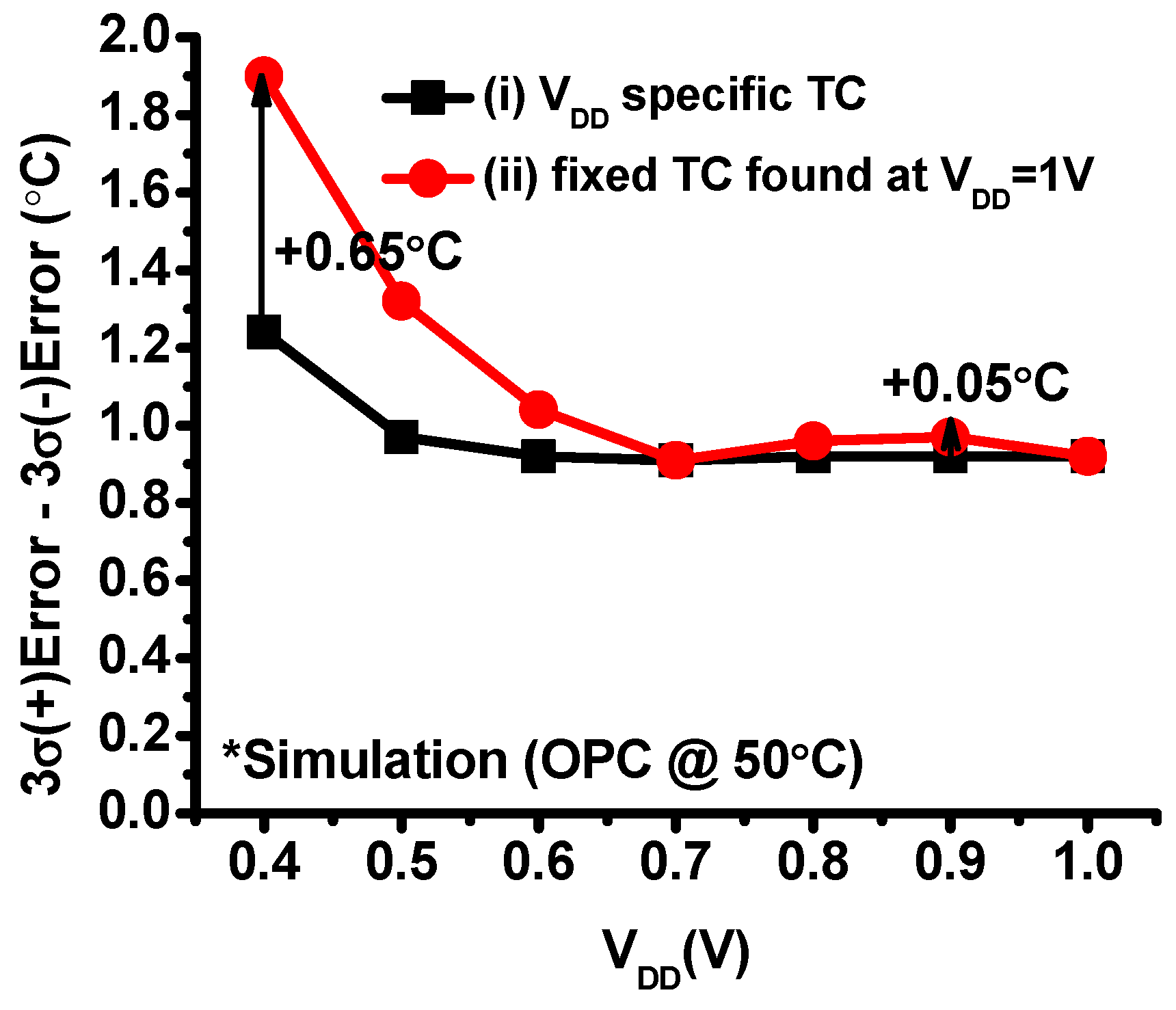
2.5. VDD Scalability and Noise
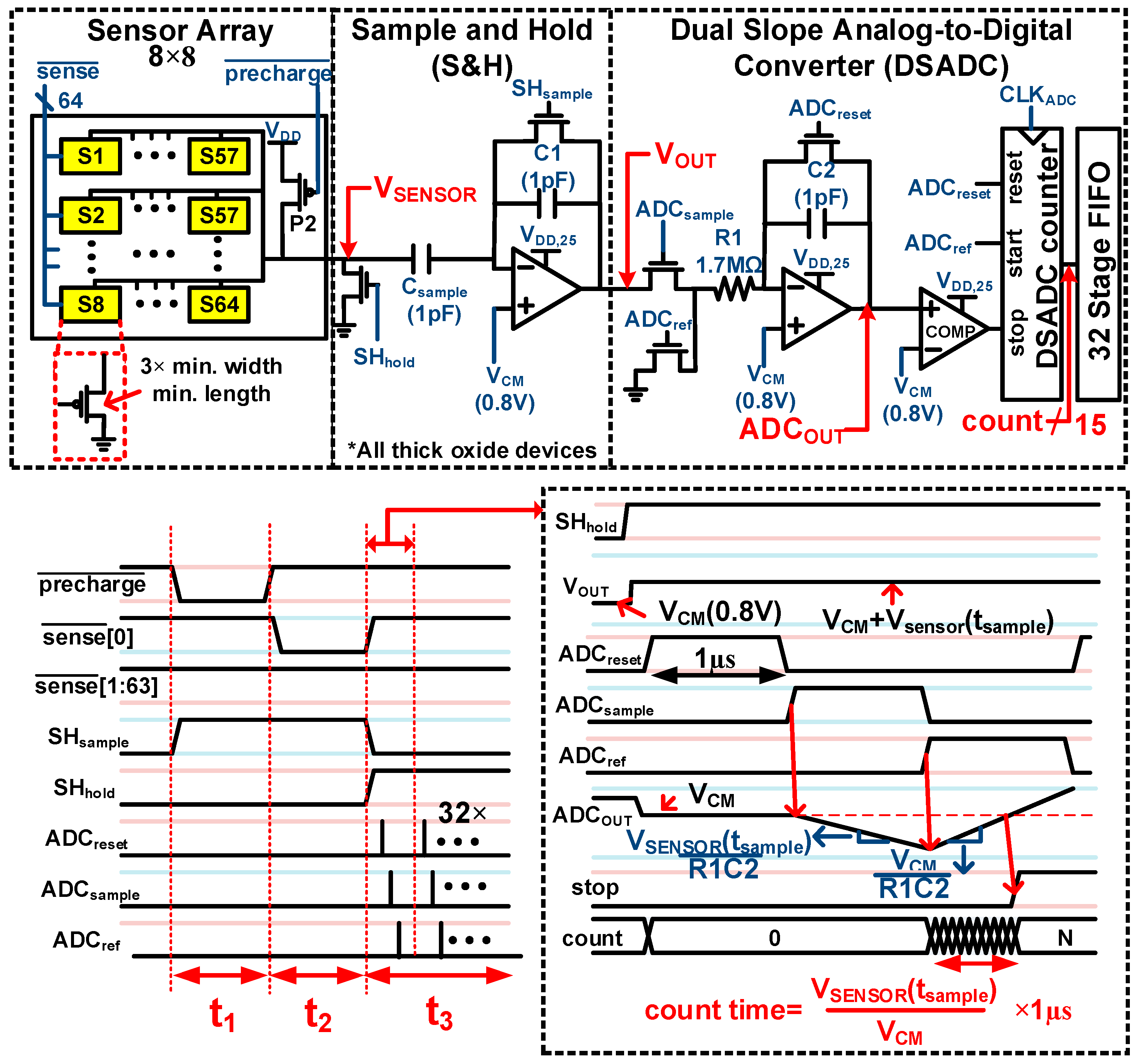
3. Test Chip Details
3.1. P2 and Csample Sharing
3.2. Operating Principle
3.3. On-Chip DSADC
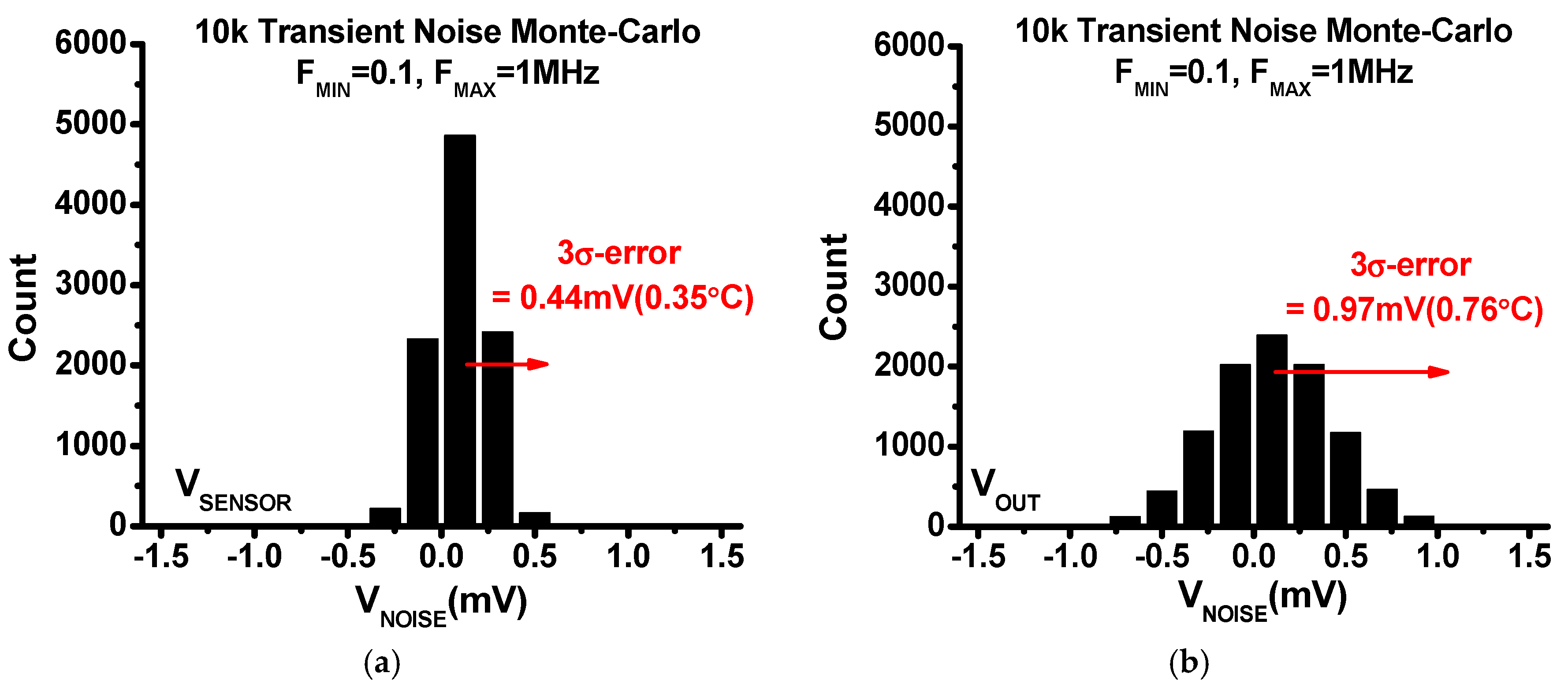
3.4. Noise Simulation
4. Measurement Results
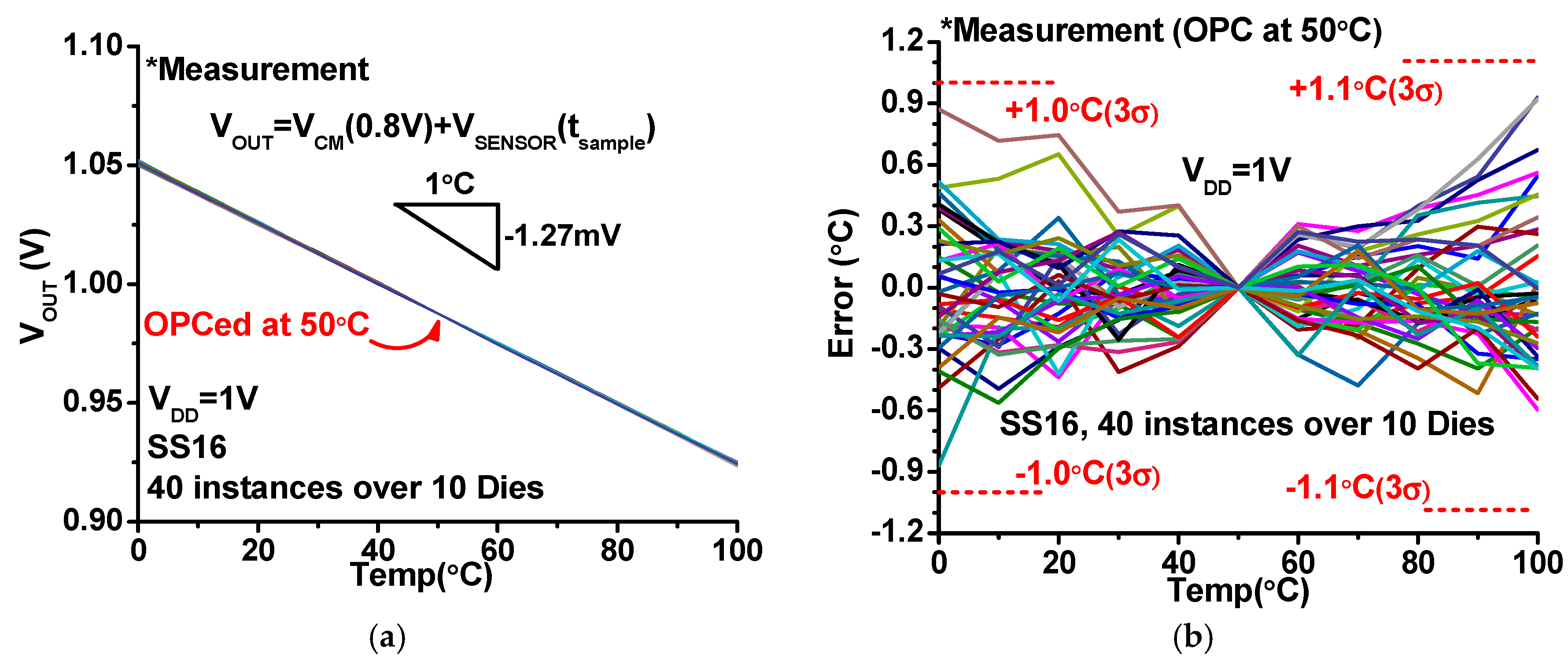
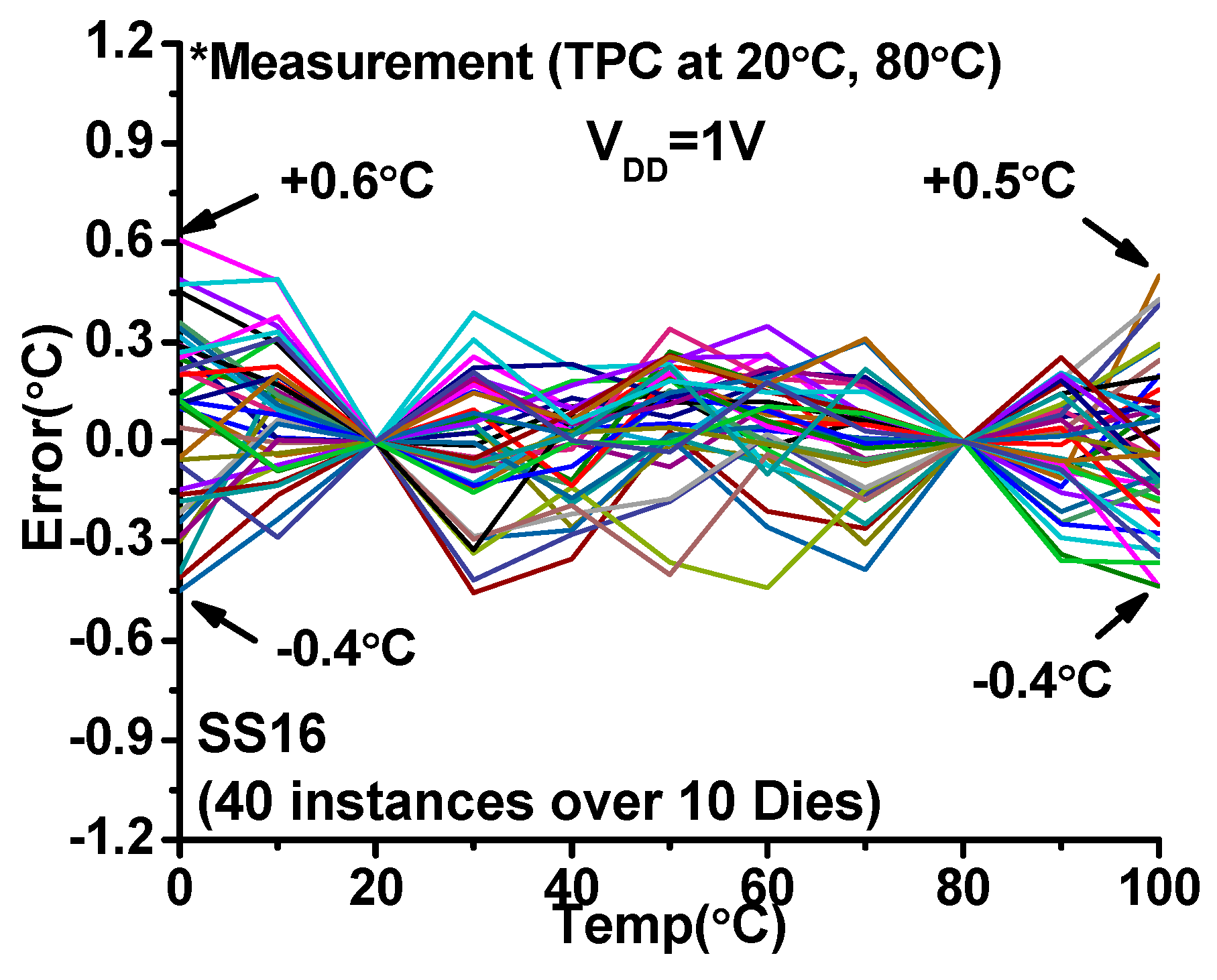
4.1. Sensor Accuracy Measurement
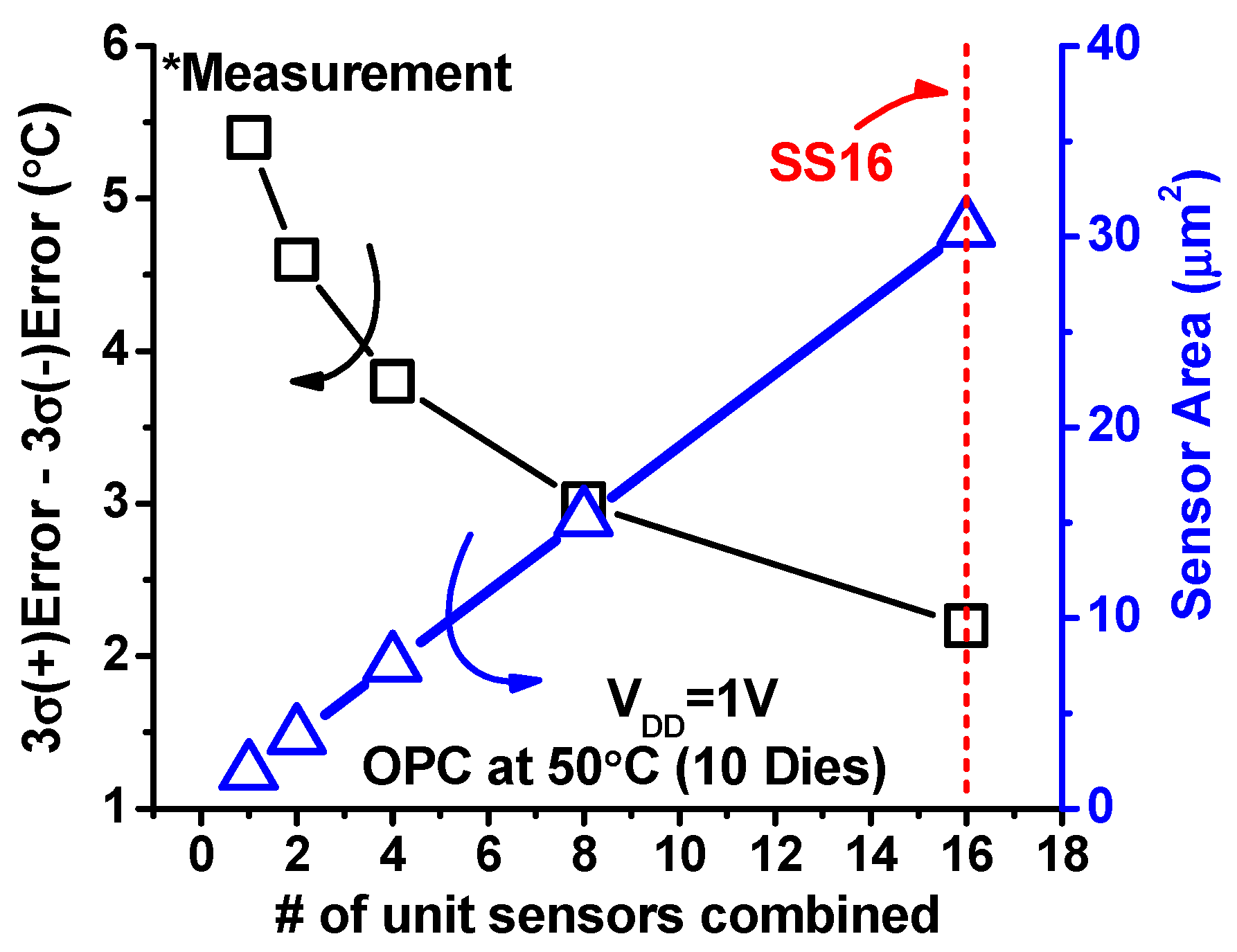
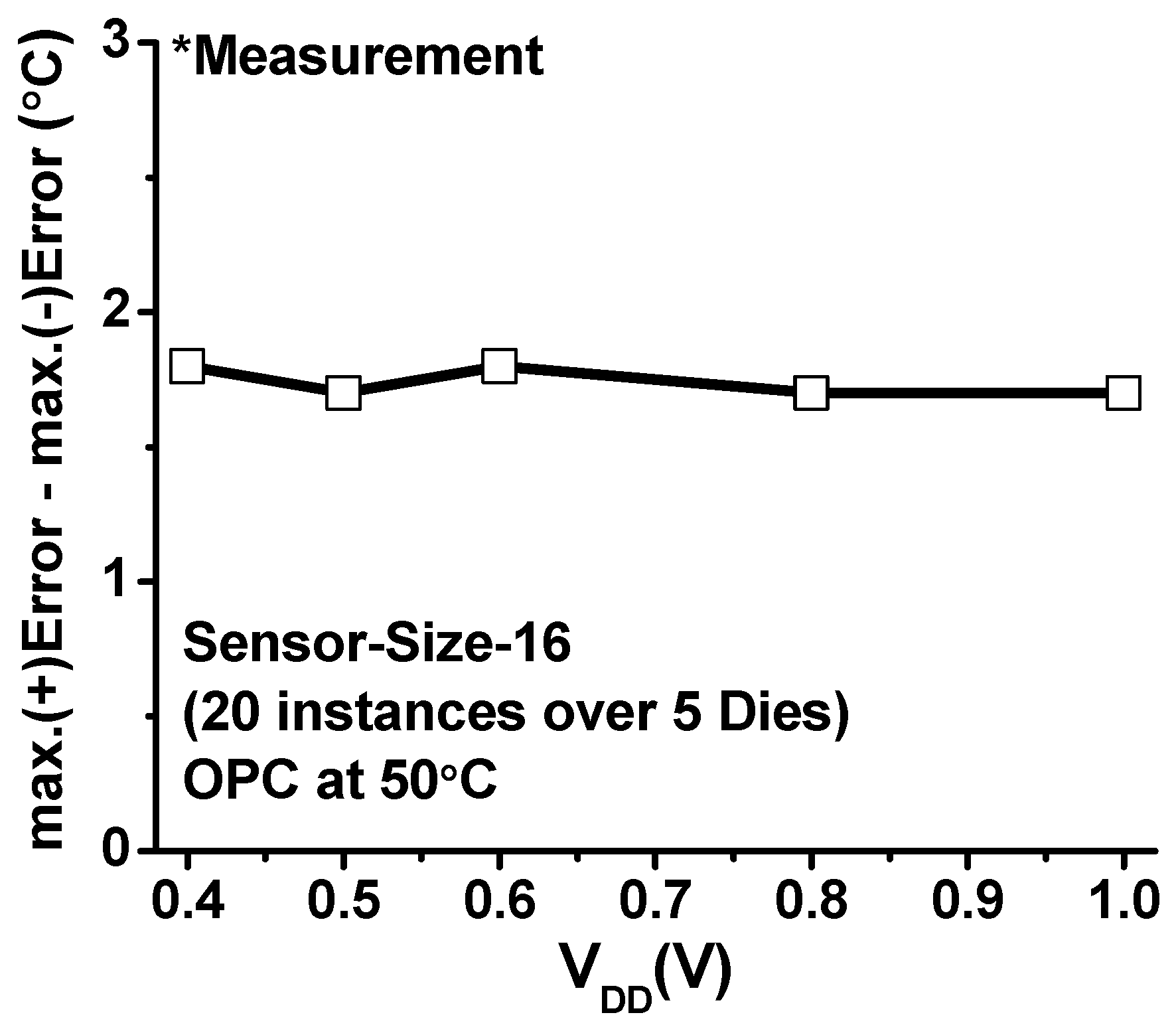
4.2. Supply Voltage Scalability Measurement
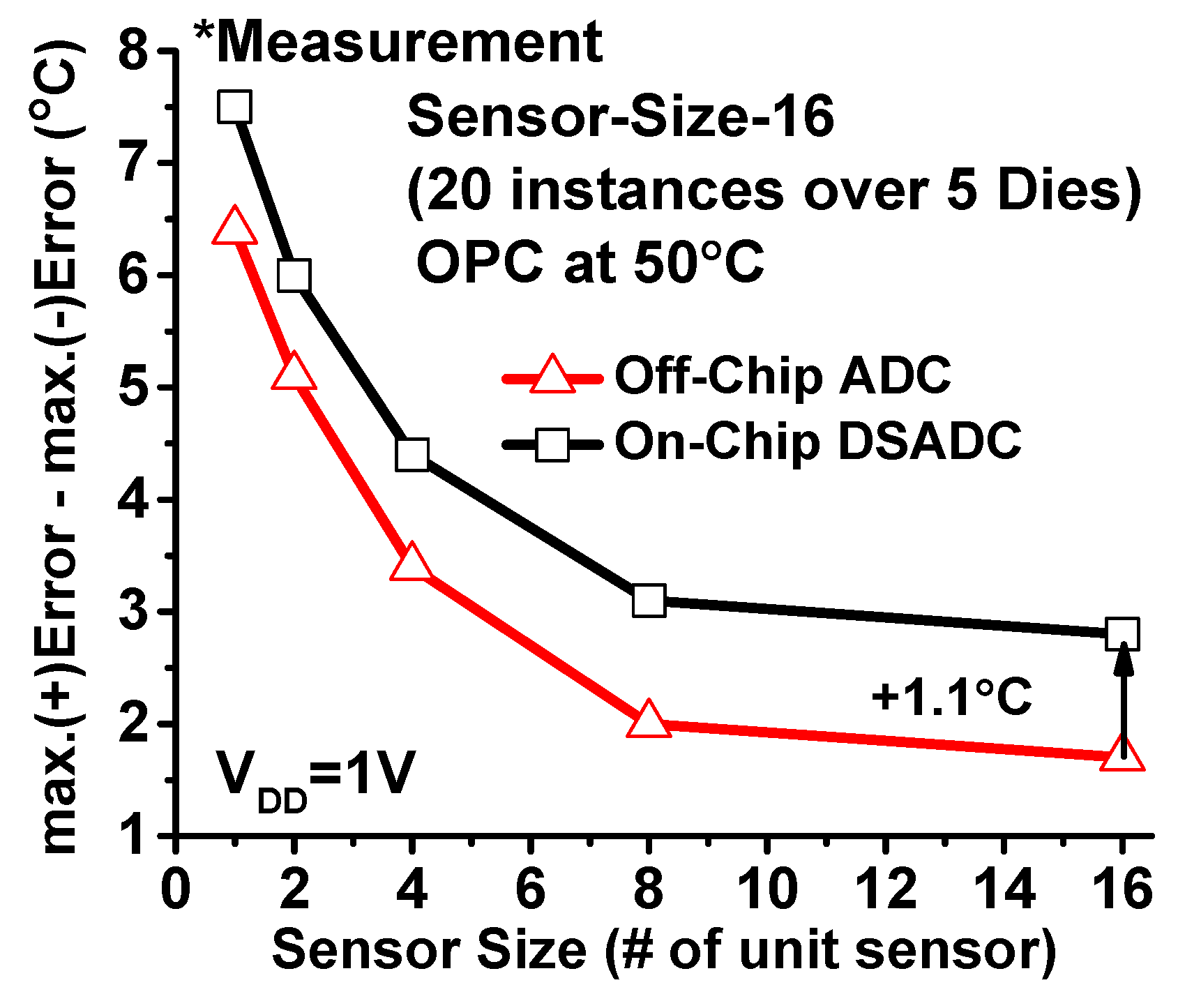
4.3. On-Chip DSADC Measurement
4.4. Comparisons
5. Digital Standard-Cell-Compatible Sensor Experiment
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Long, J.; Memik, S.O.; Memik, G. Thermal Monitoring Mechanisms for Chip Multiprocessors. ACM Trans. Archit. Code Optim. 2008, 5, 9. [Google Scholar] [CrossRef]
- Nowroz, A.N.; Cochran, R.; Reda, S. Thermal Monitoring of Real Processors: Techniques for Sensor Allocation and Full Characterization. In Proceedings of the 2010 47th ACM/IEEE Design Automation Conference, Anaheim, CA, USA, 13–18 June 2010; pp. 56–61. [Google Scholar]
- Chundi, P.K.; Zhou, Y.; Kim, M.; Kursun, E.; Seok, M. Evaluation of Miniature Temperature Sensors on On-Chip Hotspot Monitoring. In Proceedings of the ACM/IEEE International Symposium on Low Power Electronics and Design (ISLPED), Taipei, Taiwan, 24–26 July 2017. [Google Scholar]
- Souri, K.; Makinawa, K. A 0.12 mm2 7.4 µW Micropower Temperature Sensor with an Inaccuracy of ±0.2 °C (3σ) from −30 °C to 125 °C. IEEE J. Solid-State Circuits 2011, 46, 1693–1700. [Google Scholar] [CrossRef]
- Souri, K.; Chae, Y.; Makinawa, K. A CMOS Temperature Sensor with a Voltage-Calibrated Inaccuracy of ±0.15 °C (3σ) from −55 °C to 125 °C. IEEE J. Solid-State Circuits 2013, 48, 292–301. [Google Scholar] [CrossRef]
- Shor, J.S.; Luria, K. Miniaturized BJT-Based Thermal Sensor for Microprocessors in 32- and 22-nm Technologies. IEEE J. Solid-State Circuits 2013, 48, 2860–2867. [Google Scholar] [CrossRef]
- Oshita, T.; Shor, J.; Duarte, D.E.; Kornfeld, A.; Zilberman, D. Compact BJT-Based Thermal Sensor for Processor Applications in a 14 nm tri-Gate CMOS Process. IEEE J. Solid-State Circuits 2015, 50, 799–807. [Google Scholar] [CrossRef]
- Lakdawala, H.; Li, Y.W.; Raychowdhury, A.; Taylor, G.; Soumyanath, K. A 1.05 V 1.6 mW, 0.45 °C 3σ Resolution ΔΣ Based Temperature Sensor with Parasitic Resistance Compensation in 32 nm Digital CMOS Process. IEEE J. Solid-State Circuits 2009, 44, 3621–3630. [Google Scholar] [CrossRef]
- Eberlein, M.; Yahav, I. A 28 nm CMOS Ultra-Compact Thermal Sensor in Current-Mode Technique. In Proceedings of the IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 15–17 June 2016; pp. 1–2. [Google Scholar]
- Saneyoshi, E.; Nose, K.; Kajita, M.; Mizuno, M. A 1.1 V 35 µm × 35 µm thermal sensor with supply voltage sensitivity of 2 °C/10%-supply for thermal management on the SX-9 supercomputer. In Proceedings of the IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 18–20 June 2008; pp. 152–153. [Google Scholar]
- Kim, K.; Lee, H.; Jung, S.; Kim, C. A 366 kS/s 400 uW 0.0013 mm2 Frequency-to-Digital Converter based CMOS temperature sensor using multiphase clock. In Proceedings of the IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 13–16 December 2009; pp. 203–206. [Google Scholar]
- Souri, K.; Chae, Y.; Thus, F.; Makinawa, K. A 0.85 V, 600 nW All-CMOS Temperature Sensor with an Inaccuracy of ±0.4 °C (3σ) from −40 °C to 125°C. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 9–13 February 2014; pp. 222–223. [Google Scholar]
- Hwang, S.; Koo, J.; Kim, K.; Lee, H.; Kim, C. A 0.008 mm2 500 µW 469 kS/s Frequency-to-Digital Converter Based CMOS Temperature Sensor with Process Variation Compensation. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 2241–2248. [Google Scholar] [CrossRef]
- Shim, D.; Jeong, H.; Lee, H.; Rhee, C.; Jeong, D.-K.; Kim, S. A Process-Variation-Tolerant On-Chip CMOS Thermometer for Auto Temperature Compensated Self-Refresh of Low-Power Mobile DRAM. IEEE J. Solid-State Circuits 2013, 48, 2550–2557. [Google Scholar] [CrossRef]
- Yang, T.; Kim, S.; Kinget, P.R.; Seok, M. Compact and Supply-Voltage-Scalable Temperature Sensors for Dense On-Chip Thermal Monitoring. IEEE J. Solid-State Circuits 2015, 50, 2773–2785. [Google Scholar] [CrossRef]
- Lu, L.; Duarte, D.E.; Li, C. A 0.45 V MOSFETs-based Temperature Sensor Frontend in 90 nm CMOS With a Non-Calibrated ±3.5 °C 3σ Relative Inaccuracy from −55 °C to 105 °C. IEEE Trans. Circuits Syst. II Express Briefs 2013, 60, 771–775. [Google Scholar] [CrossRef]
- Lu, L.; Vosooghi, B.; Dai, L.; Li, C. A 0.7 V Relative Temperature Sensor with a Non-Calibrated ±1 °C 3σ Relative Inaccuracy. IEEE Trans. Circuits Syst. I Regul. Pap. 2015, 62, 2434–2444. [Google Scholar] [CrossRef]
- Saligane, M.; Khayatzadeh, M.; Zhang, Y.; Jeong, S.; Blaauw, D.; Sylvester, D. All-Digital SoC Thermal Sensor using On-Chip High Order Temperature Curvature Correction. In Proceedings of the IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 28–30 September 2015. [Google Scholar]
- Quan, R.; Sonmez, U.; Sebastiano, F.; Makinwa, K.A.A. A 4600 µm2 1.5 °C (3σ) 0.9 kS/s Thermal-Diffusivity Temperature Sensor with VCO-Based Readout. In Proceedings of the IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015; Volume 58, pp. 488–489. [Google Scholar]
- Sonmez, U.; Sebastiano, F.; Makinwa, K.A.A. 1650 µm2 Thermal-Diffusivity Sensors with Inaccuracies Down to ±0.75 °C in 40 nm CMOS. In Proceedings of the IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 31 January–4 February 2016; pp. 206–207. [Google Scholar]
- Dorsey, J.; Searles, S.; Ciraula, M.; Johnson, S.; Bujanos, N.; Wu, D.; Braganza, M.; Meyers, S.; Fang, S. An Integrated Quad-Core OpteronTM Processor. In Proceedings of the IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 11–15 February 2007; pp. 102–103. [Google Scholar]
- Floyd, M.; Allen-Ware, M.; Rajamani, K.; Brock, B.; Lefurgy, C.; Drake, A.J.; Bose, P.; Buyuktosunoglu, A. Introducing the adaptive energy management features of the power 7 chip. IEEE Micro 2011, 31, 60–75. [Google Scholar] [CrossRef]
- Fluhr, E.J.; Friedrich, J.; Dreps, D.; Zyuban, V.; Still, G.; Gonzalez, C.; Hall, A.; Hogenmiller, D.; Malgioflio, F.; Nett, R.; et al. 5.1 POWER8TM: A 12-core server-class processor in 22 nm SOI with 7.6 Tb/s off-chip bandwidth. In Proceedings of the 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers, San Francisco, CA, USA, 9–13 February 2014; pp. 96–97. [Google Scholar]
- Rangan, K.K.; Wei, G.; Brooks, D. Thread motion: Fine-grained power management for multi-core systems. In Proceedings of the 36th Annual International Symposium on Computer Architecture (ISCA), Austin, TX, USA, 20–24 June 2009; pp. 302–313. [Google Scholar]
- Truong, D.N.; Cheng, W.H.; Mohsenin, T.; Yu, Z.; Jacobson, A.T.; Landge, G.; Meeuwsen, M.J.; Watnik, C.; Tran, A.T.; Xiao, Z.; et al. A 167-processor computational platform in 65 nm CMOS. IEEE J. Solid-State Circuits 2009, 44, 1130–1144. [Google Scholar] [CrossRef]
- Makinwa, K.A.A. Temperature Sensor Performance Survey. TU Delft, The Netherlands. Available online: http://ei.ewi.tudelft.nl/docs/TSensor_survey.xls (accessed on 25 May 2018).
- Kim, S.; Seok, M. A 30.1 μm2, <±1.1 °C-3σ-Error, 0.4-to-1.0 V Temperature Sensor based on Direct Threshold-Voltage Sensing for On-Chip Dense Thermal Monitoring. In Proceedings of the 2015 IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 28–30 September 2015. [Google Scholar]
- Tsividis, Y.; McAndrew, C. Operation and Modeling of the MOS Transistors, 3rd ed.; Oxford University Press: Oxford, UK, 2011. [Google Scholar]
- Murmann, B. Thermal Noise in Track-and-Hold Circuits: Analysis and Simulation Techniques. IEEE Solid-State Circuits Mag. 2012, 4, 46–54. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Type | Optimal Sizing (µm) | Optimal tsample (µs) | +3σ/−3σ Error (°C) | TC (mV/°C) |
|---|---|---|---|---|
| 2.5 V thick-oxide | L = 0.28 W = 3.6 | 100 | 0.17/−0.76 | −1.50 |
| 1.0 V thin-oxide high-VTH | L = 0.54 W = 3.0 | 10 | −0.06/−2.20 | −0.87 |
| 1.0 V thin-oxide standard-VTH | L = 0.54 W = 3.0 | 10 | −0.03/−1.85 | −0.85 |
| 1.0 V thin-oxide low-VTH | L = 0.54 W = 3.6 | 1 | −0.24/−2.48 | −0.70 |
| Body Connection | Optimal Sizing (µm) | Optimal tsample (µs) | +3σ/−3σ Error (°C) | TC (mV/°C) |
|---|---|---|---|---|
| VDD | L = 0.28 W = 3.6 | 100 | 0.17/−0.76 | −1.50 |
| VSENSOR | L = 2.52 W = 12 | 100 | 0.29/−0.70 | −1.64 |
| [7] | [17] | [9] | [10] | [13] | [14] | [15] Balanced | [16] | [18] | [20] | Proposed | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Tech. | 14 nm | 180 nm | 28 nm | 65 nm | 65 nm | 44 nm | 65 nm | 90 nm | 40 nm | 40 nm | 65 nm |
| Type | BJT | BJT | BJT | MOS | MOS | MOS | MOS | MOS | MOS | TD | MOS |
| Front end Area 1 () | 2900 | 360 | - | 1255 | 2000 * | 1725 | 279 | 1058 | 240 | 400 * | 30.1 |
| Total Area 2 () | 8700 | - | 3800 | 5000 * | 8000 | 41,300 | - | - | - | 1650 | 30.1 + 1693 (=6770/4) + |
| VDD (V) | 1.35 | 1~1.8 | 1.1~2 | 1.1 | 1 | 1.1 | 0.6~1 | 0.45~1.5 | 0.5~1 | 0.9~1.2 | 0.4~1 |
| Temperature Coefficient (mV/°C) | - | - | - | - | - | 3.2 | 0.57 | - | - | - | 1.27 |
| Range () | 0~100 | −55~125 | −20~130 | 40~90 | 0~110 | 0~110 | 0~100 | −55~105 | −40~100 | −40~125 | 0~100 |
| Error 3 () | - | ±0.6 (3σ) | ±1.8 (3σ) | - | - | - | - | ±3.5 (3σ) | - | ±1.4 (3σ) | - |
| Error 4 () (on-chip ADC) | - | - | ±0.8 (3σ) | <3.1 | ±1.5 (3σ) | −1.4~2.7 | - | ±2.0 (3σ) + | - | ±0.75 (3σ) | ±1.4 |
| Error 4 () (off-chip ADC) | - | - | - | - | - | - | -3.4~3.2 | - | - | - | ±1.1(3σ) |
| Error 5 () | 3.3 | - | - | - | - | - | −1.5~1.6 + | - | −0.95~0.97 | - | −0.4~0.6 + |
| Sensor power | - | - | - | - | - | 0.92 µW | - | 17 µW | - | 1 pJ ** | |
| Total power | 1.11 mW | - | 16 µA | - | 0.5 mW | 0.4 µW | - | - | - | 2.5 mW | - |
| Samples | 52 | 318 | 630 | - | 20 | 61 | 64 | 27 | 30 | 144 | 40 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Seok, M. A Sub-50 µm2, Voltage-Scalable, Digital-Standard-Cell-Compatible Thermal Sensor Frontend for On-Chip Thermal Monitoring. J. Low Power Electron. Appl. 2018, 8, 16. https://doi.org/10.3390/jlpea8020016
Kim S, Seok M. A Sub-50 µm2, Voltage-Scalable, Digital-Standard-Cell-Compatible Thermal Sensor Frontend for On-Chip Thermal Monitoring. Journal of Low Power Electronics and Applications. 2018; 8(2):16. https://doi.org/10.3390/jlpea8020016
Chicago/Turabian StyleKim, Seongjong, and Mingoo Seok. 2018. "A Sub-50 µm2, Voltage-Scalable, Digital-Standard-Cell-Compatible Thermal Sensor Frontend for On-Chip Thermal Monitoring" Journal of Low Power Electronics and Applications 8, no. 2: 16. https://doi.org/10.3390/jlpea8020016
APA StyleKim, S., & Seok, M. (2018). A Sub-50 µm2, Voltage-Scalable, Digital-Standard-Cell-Compatible Thermal Sensor Frontend for On-Chip Thermal Monitoring. Journal of Low Power Electronics and Applications, 8(2), 16. https://doi.org/10.3390/jlpea8020016