
Development and Prospect of Wireless Power Transfer Technology Used to Power Unmanned Aerial Vehicle


Avic Shaanxi Aero Electric Co., Ltd., Xi’an 710000, China
*
Author to whom correspondence should be addressed.
Electronics 2022, 11(15), 2297; https://doi.org/10.3390/electronics11152297
Submission received: 25 June 2022
/
Revised: 20 July 2022
/
Accepted: 21 July 2022
/
Published: 23 July 2022
(This article belongs to the Special Issue Wireless Power Transfer and Wireless Energy Harvest)
Abstract
:Recently, unmanned aerial vehicles (UAV) have been widely used in the military and civil fields. However, the battery power is a key factor that restricts the operation range of the UAV. Using wireless power transfer (WPT) technology to power UAVs can improve the endurance of UAVs and enhance their maneuverability and flexibility. In this paper, the WPT technology is divided into three types: near-field WPT technology, far-field WPT technology and solar-powered UAV. The developments, challenges and prospects of these three types of WPT technologies used to power UAVs are summarized. For each type of WPT technology, the basic working principles are first introduced. The development of each type of WPT technology, as well as the challenges and application prospects in UAV charging, is introduced. The related works consist of academic and industry research, ranging from prototypes to commercial systems. Finally, three types of WPT technology used in UAV charging are compared and discussed, and the advantages and disadvantages of each type of WPT technology are shown. The related research showed that using WPT technology to power the UAV is a promising way to enhance the endurance of the UAV.
1. Introduction
In recent years, unmanned aerial vehicles (UAV) have been widely used in both military and civilian fields, which shows a bright application prospect [1,2]. In the military field, UAVs can be used for border patrol, electronic jamming, communication relay, long-range bombing, and so on. In the civilian field, UAVs can be used for flood fighting, rescue and disaster recovery, agricultural and forestry plant protection, cargo transportation, and so on. UAVs can be divided into rotary-wing UAVs, fixed-wing UAVs and unmanned helicopters. Rotor-wing UAV is generally a small-type UAV that uses batteries as a power source. Fixed-wing UAVs and unmanned helicopters are generally huge-type UAVs that use aviation fuel as a power source. With the development of multi-electric and all-electric technologies, using batteries as an energy source is also an important development direction for huge-type UAVs. However, all types of UAVs face the problem of limited endurance. The limited endurance greatly limits the working range of UAVs, so improving the endurance of UAVs is an important issue to be addressed.
At present, the main method to improve the working range of the UAV is to optimize the design of the aircraft body due to the limited energy density of the battery. The related methods include improving the structure of the aircraft to reduce drag or choosing a more efficient motor [3,4,5]. However, this does not fundamentally solve the problem of the limited working range of UAVs. Some researchers have proposed wireless energy transfer technology to power UAVs, which can greatly solve the problem of insufficient UAV range once applied on a large scale.
Wireless power transfer (WPT) technology, also known as contactless power transfer (CPT) technology, refers to the technology that uses a kind of field or wave to achieve effective electrical energy transmission over a certain distance without using wires or conductors [6,7,8,9]. WPT technology was first proposed by Nikola Tesla, a Serbian–American scientist, and is currently focused on connecting the power source and load without electrical contact [10]. It achieves electrical energy transmission by means of an indirect form of energy, and the principle is shown in Figure 1. On the transmitting side, the energy conversion device converts the electrical energy into another form of energy and transmits it through the medium. On the receiving side, the energy conversion device converts the received energy back to electrical energy again, and the electrical energy is processed and powers the load.
Wireless power transfer technology can be divided into electromagnetic-based WPT technology and mechanical-based WPT technology according to the form of indirect energy, as shown in Figure 2 [11,12,13,14]. Electromagnetic-based WPT technology can be classified into the magnetic field principle, electric field-principle WPT, microwave-principle WPT and laser-principle WPT. Mechanical-based WPT technology can be classified into ultrasonic-principle WPT and mechanical vibration-principle WPT. At present, the WPT technologies applied in the aviation field include inductively wireless power transfer (IWPT), magnetic coupling resonant wireless power transfer (MCR-WPT), laser wireless power transfer (LWPT), and microwave wireless power transfer (MWPT). Among them, IWPT and MCR-WPT are near-field WPT technologies, and LWPT and MWPT are far-field WPT technologies. In addition, researchers also investigated solar-powered UAV for the specific context of applications, which can also be considered as one of the wireless power transfer technologies because the power of the UAV is not from oil or electricity with direct contact but from indirect contact and energy conversion of solar power.
In this paper, an overview of WPT technology used to power UAVs is shown. For each type of WPT technology, the basic working principles are first introduced. The development of each type of WPT technology, as well as the challenges and application prospects in UAV charging, was introduced. The related works consist of academic and industry research, ranging from prototypes to commercial systems. Finally, three types of WPT technology used in UAV charging were compared and discussed, and the advantages and disadvantages of each type of WPT technology are shown. The related research showed that using WPT technology to power the UAV is a promising way to enhance the endurance of the UAV. It should be noted that the focus of this paper is on research where system prototypes have been tested. Papers or reports where only theoretical analyses, simulations or experiments on parts and components of prototypes were carried out are not discussed in this paper.
2. Near-Field WPT Technology in UAV Charging
2.1. Introduction to Near-Field WPT Technologies
Inductively wireless power transfer (IWPT) technology and magnetically coupled resonant wireless power transfer (MCR-WPT) technology are near-field WPT technologies.
IWPT is the most widely researched wireless power transfer technology, and the working principle is shown in Figure 3a [15,16]. On the transmitting side, the 50 Hz AC voltage is converted to high-frequency AC after rectification and high-frequency inversion, which is sent to the transmitting coil after impedance compensation to establish a high-frequency magnetic field. On the receiving side, the energy received by the receiving coil is used for the electrical load after impedance compensation and electric energy processing. In IWPT technology, the transmitting coil and receiving coil are similar to loosely coupled transformers. The IWPT technology can achieve high output power, even up to tens of kW. However, the transmission distance of IWPT technology is small, generally not exceeding the diameter of the coil.
MCR-WPT is also a widely researched wireless power transfer technology, and its working principle is shown in Figure 3b [17,18,19]. On the transmitting side, the 50 Hz AC voltage is converted into high-frequency AC voltage after rectification and high-frequency inversion and sent to the transmitter coil after impedance compensation. The transmitting coil and receiving coil work in a magnetic field-resonant state or a self-resonant state, thereby realizing energy transmission. On the receiving side, the energy received by the receiving coil is used for the electrical load after impedance matching and electric energy processing. The resonant frequency of MCR-WPT technology is much higher than that of IWPT technology, usually MHz, and the transmission distance is also farther than ICPT, up to several meters. In addition, a relay coil may be used to achieve a longer transmission distance in MCR-WPT.
Although IWPT technology and MCR-WPT technology are the most widely researched technologies by scholars, the application of these two technologies in UAV charging, especially in large aircraft charging, has rarely been reported, which is attributed to the limited transmission distance of these two technologies. Currently, most researchers applied these two technologies to powering small types of UAV.
2.2. Development of Near-Field WPT Technology in UAV Charging
In 2009, MIT researchers developed a Reviray UAV that was capable of staying on a high-voltage power line based on the Defense Research Association′s (DRA) project—Power Line Urban Sentry Plus. The 2.7 kg in-weight UAV took power from the high-voltage line to charge the onboard battery via IWPT technology, and it could fly along the high-voltage power line at a speed of 75 km/h [20].
In 2016, researchers from the University of L′Aquila installed a hollow plane receiving coil on the abdomen of the UAV. Under well-aligned conditions, 70 W output power was achieved with 89% efficiency over a distance of 10 cm, and the operating frequency was 150 kHz, as shown in Figure 4 [21].
In 2017, researchers from Imperial College London developed an MCR-WPT system for hovering UAVs, as shown in Figure 5. On the transmitting side, a class-E power amplifier was used as the transmitting power source, and the operating frequency was 13.56 MHz. On the receiving side, a class-D rectifier and a DC/DC converter were used as the power receiver. The MCR-WPT system achieves wireless charging of hovering UAV with an output power of 21 W at a distance of 10 cm [22].
Researchers from the City University of Hong Kong applied a variable-pitch transmitting coil for efficient wireless power supply to UAV, achieving a power transmission of 170 W at 90% efficiency over a distance of 150 mm, and the system operates at 370 kHz, as shown in Figure 6 [23].
In 2019, WiBotic, an American company, launched a flat-panel charging platform with WPT technology PowerPad, which could be used to charge the UAV by a corresponding wireless charging module on the drone, and the charging efficiency can reach 85% [24].
Wuhan University designed a dissymmetrical coupling mechanism using for UAV wireless charging. The transmitting coil was composed of three coaxial solenoid coils with different diameters, and the turn number of the receiving coil was 10. The working frequency was 364.44 kHz, and it realized 64.87 W power transmission with an efficiency of 57.94% when the transmission distance was 0.5 m [25].
There are also some other researchers who studied the key issues in using IWPT technology and MCR-WPT technology to charge UAVs with WPT technology, such as coupling mechanism, anti-offset measures, transmitting power supply, high-efficiency transmission methods, and so on [26,27,28,29,30,31]. However, these research results have only conducted theoretical research, simulation research or experiments for the research content, but not completed UAV wireless charging system experiment, which is not further discussed here. According to the research works above, comparisons of near-field WPT technologies used to power UAVs are shown in Table 1. The challenges and prospects of using near-field WPT technologies to power UAVs can be summarized in the following.
2.3. Challenges of Near-Field WPT Technology in UAV Charging
- (1)
- As the two most widely researched wireless power transfer technologies, both IWPT and MCR-WPT technologies can transmit several kilowatts or even ten kilowatts of power in consumer electronic or electric vehicle wireless charging. However, there are still many challenges when used for UAV charging as follows;
- (2)
- The transmission distance is limited. The transmission distance of IWPT technology is generally no more than the diameter of the coil, and the transmission distance of MCR-WPT technology is generally only a few meters, which restricts the application of these two WPT technologies in the aviation field. How to improve the transmission distance to 100 m or even kilometers is the primary problem that restricts the large-scale application of WPT technology in UAV charging;
- (3)
- The anti-offset problem should be of concern. The flight of an aircraft is a dynamic process, and the landing position is random. For IWPT technology and MCR-WPT technology, the coupling mechanism determines that the transmitting side and the receiving side should be aligned when charging. If the offset between the transmitter and the receiver is too large, the coupling between the transmitter coil and the receiver coil will be weakened, which in turn causes the output voltage to drop and the transmission power to be significantly affected. Therefore, measures should be taken to deal with the offset problem between the transmitting coil and the receiving coil to ensure the coupling coefficient between the transmitter coil and the receiver coil;
- (4)
- A high-performance coupling mechanism should be designed. The coupling mechanism is an important part of IWPT and MCR-WPT technology. For existing UAVs, the load is often small, and their anti-electromagnetic interference ability is poor. In order to achieve high-power energy transmission, the weight of the traditional coupling mechanism is often relatively large. At the same time, there are a large number of wireless electronic devices in the UAV, and magnetic field coupling may affect the operation of the devices. In order to reduce the weight of the coupling mechanism and ensure the transmission power, the coupling structure should be reasonably optimized to achieve low weight, high transmission power and high anti-electromagnetic interference capability.
2.4. Prospect of Near-Field WPT Technology in UAV Charging
As an emerging charging method, although MCR-WPT technology and IWPT technology are studied limited, they still have great development prospects in UAV wireless charging. In the future, the following development directions can be considered:
- (1)
- Unattended and fixed-point autonomous charging of UAV. Charging stations can be set up. When the power of the UAV is low, it automatically navigates to the nearest charging station for autonomous charging. The technology saves labor and enhances charging flexibility as it uses coils for charging, which only need to be aligned and do not need to plug and unplug;
- (2)
- High-power dynamic wireless charging. Dynamic charging of aircraft can be considered because the transmitting coil and receiving coil are not in contact with WPT technologies. For example, when the aircraft is taxing on the ground, coils can be laid on the ground to dynamically charge the aircraft;
- (3)
- Wireless charging of rotating devices. There are many rotating devices on the aircraft in which the sensors should be installed to obtain more flight information, such as propellers, rotating blades, etc. Currently, the sensors on these rotating equipment are mainly powered by batteries or slip rings. WPT technology can be used to charge the loads on the rotating equipment since the transmitting side and the receiving side are not in contact;
- (4)
- Wireless power supplying the equipment inside the aircraft. There are many loads in the aircraft, and some need to be disassembled and installed repeatedly. The existence of the plug makes the equipment wear and tear when plugging and unplugging. Using WPT technology can avoid plugging and unplugging, so it can avoid wear and tear and other hidden problems.
3. Far-Field WPT Technology in UAV Wireless Charging
3.1. Introduction of Far-Field WPT Technologies
Laser wireless power transfer technology (LWPT) and microwave wireless power transfer technology (MWPT) are far-field WPT technologies.
LWPT technology realized energy transmission based on the photovoltaic effect, and the working principle is shown in Figure 7 [32,33,34]. On the transmitting side, the laser power supply powers the laser converter, which converts the DC obtained by mains rectification into the laser and emits it through the optical system. On the receiving side, the photovoltaic array converts the received laser into electric energy through photovoltaic conversion and supplies it to the load after the energy processing circuit.
MWPT technology is based on electromagnetic radiation for energy transmission, and the working principle is shown in Figure 8 [35,36,37]. On the transmitting side, the DC-RF inverter circuit converts the DC obtained by mains rectification into the microwave and sends it to the transmitting antenna, which would transmit the microwave. On the receiving side, the receiving antenna converts the received microwave into electric energy, which is used by the load after the energy processing circuit. The energy transmission distance of MWPT technology is long, up to thousands of meters or even hundreds of kilometers.
3.2. Development of Far-Field WPT Technology in UAV Charging
In July 1964, Raytheon demonstrated the MWPT experiment in the aviation field, as shown in Figure 9. In the experiment, the microwave beam was used to drive the small helicopter, which made the helicopter fly continuously for 10 h at an altitude of about 15 m. The working frequency of the system is 2.45 GHz, and the output power of the receiving side is 280 W with a 77 W-power helicopter motor [38].
In 1980, Canada launched the SHARP (Station High Altitude Relay Platform) program to build microwave transmitters on the ground to charge UAVs in the air. In 1987, the UAV model, with a wingspan of 4.5 m and a weight of 4.1 kg, was powered by MWPT technology under the support of the SHARP program. The working frequency of the system is 2.45 GHz, the transmission distance is 150 m, and the output power is 150 W, as shown in Figure 10 [39].
In 1992, Japan developed the MILAX (Microwave Lifted Airplane Experiment) program, which uses microwaves to transfer wireless power for UAVs. In the experiment, the working frequency of the system is 2.411 GHz, and the transmitted power is 1 kW. The microwave is kept on the aircraft through the phased array. The aircraft is a light wooden aircraft with a wingspan of 2.5 m and a weight of 4 kg, and the flight altitude is 25 m [40].
In the 21st century, MWPT technology continues to be developed, but the report of its application in the aviation field is limited, while widely used in other fields. Among them, Japan, as an island country, pays more attention to the development of MWPT technology due to a shortage of resources [41,42,43]. In 2015, Mitsubishi Heavy Industries of Japan transmitted 10 kW of power energy and lit LED lights beyond 500 m [44].
With the development of WPT technology, the application of LWPT technology in the aviation field has gradually attracted researchers’ attention. In 2003, NASA first used LWPT to charge for the model UAV in flight, as shown in Figure 11 [45]. In the experiment, a laser with a wavelength of 940 nm and optical power of 500 W was used to provide 6 W power for a UAV model beyond 15 m. The aircraft model flew continuously for 15 min.
In 2006, the electric kite with a photovoltaic cell was charged by LWPT technology at Kinki University [46]. In the experiment, an optical fiber coupled laser transmitter with a wavelength of 808 nm and a power of 200 W was used to make the electric kite hover for 1 h at a speed of 10 m/s and a height of 50 m. The electro-optical efficiency of the laser was 34.2%, and the photovoltaic module consisted of 30 pieces of GaAs chip with 4 cm × 7 cm. The laser electric efficiency was 21%, and the total electric-to-electric conversion efficiency was 7.2%.
In 2009, Laser Motive completed the flight test of laser wireless charging for the PELICAN four-rotor helicopter, setting a record of hovering flight of 12.5 h. In 2012, Laser Motive cooperated with the Lockheed Martin company and placed an LWPT system on the UAV Stalker, in service of the US military, to increase its stay time in the air from 2 h to more than 48 h [47,48].
In 2013, the US Navy laboratory conducted a flight test of LWPT technology for rotary wing UAVs indoors [49]. The experiment adopted a 2 kW single-mode fiber laser, and the laser battery adopted an InGaAs laser battery array, which could provide 160 W~190 W power. By using the optical tracking system, the laser beam was automatically positioned in the center of the laser battery array to realize wireless laser charging at a distance of 40 m. In 2021, the US Navy laboratory adopted MWPT technology to achieve energy transmission with a distance of 1 km and a power of 1.6 kW, as shown in Figure 12 [50].
In 2014, Shandong Aerospace Electronics Technology Research Institute conducted a dynamic test of LWPT technology between two airships, as shown in Figure 13. The distance between the two airships was 50 m~100 m, the speed was 5 m/s, the input power was 88 W, the maximum receiving power was 13.43 W, and the maximum transmission efficiency was 16.08% [51].
Since 2018, the US Army has been studying the use of LWPT to supply kinetic energy to solve the problem of the limited endurance of UAVs [52]. Some researchers have studied the key issues of LWPT technology, such as the modeling of LWPT technology, efficiency improvement methods, aerospace applications, etc. [53,54,55,56,57]. Since these contents are not applications for powering UAVs, they are not introduced in this paper.
According to the research works above, a comparison of far-field WPT technologies used to power UAVs is shown in Table 2. The challenges and prospects of using far-field WPT technologies to power UAVs can be summarized in the following.
3.3. Challenges of Far-Field WPT Technology in UAV Charging
Far-field WPT technology has made some progress, but it has not been applied substantially in powering UAVs. In practice, far-field WPT technology still faces the following challenges:
- (1)
- Transmission distance should be improved. From the existing research, although the transmission distance of LWPT and MWPT technology is higher than IWPT and MCR-WPT technology in charging for UAVs, the transmission distance is still limited, which restricts the application of LWPT and MWPT technology in the aviation field;
- (2)
- Transmission efficiency should be improved. For LWPT, the conversion efficiency is limited between light and electricity, which is restricted by the photoelectric conversion elements, the key elements of the laser generator or the photovoltaic cell. When coupled with the loss of laser in the transmission process and the influence of transmitting and receiving antenna, the final LWPT efficiency is low, generally less than 15%. For MWPT technology, the transmission efficiency is also less than 10% due to a similar reason compared with LWPT technology;
- (3)
- Dynamic characteristics and closed-loop control methods need to be improved. In LWPT and MWPT systems, the size of the transmitter and receiver are relatively small compared to the transmission distance. The flight of the aircraft is a random and dynamic process. In order to obtain higher transmission power and efficiency, the laser or microwave should be accurately irradiated on the receiving side. A laser beam or microwave control and tracking system are required, and the normal incidence should be guaranteed for higher energy conversion;
- (4)
- Safety problems should be concerned. In order to realize high-power and long-distance energy transmission, the laser beam or microwave in transmission will carry large energy. If obstacles are encountered during use, there will be a great loss of energy. Additionally, it will be a threat to life if a live object is encountered with the beam.
3.4. Prospect of Far-Field WPT Technology in UAV Charging
The transmission distance of far-field WPT technology is long, up to several kilometers, so it has good application prospects. Specifically, the prospect of far-field WPT technology can be summarized as follows:
- (1)
- Long-distance power supply during long endurance. The transmission distance between laser and microwave is long. Therefore, LWPT and MWPT technology could be used to supply long-distance power for UAVs in the air so as to realize the long-term endurance of UAVs;
- (2)
- Charging base station of swarm UAV. Drone swarm can be used for long-range military attacks, terrain viewing, communication support, etc. However, the size is small, and the load is limited to UAVs in the swarm, which results in short endurance and action radius of drones in the swarm. Therefore, one large UAV in the swarm can be considered as a charging base station to continuously charge for other UAVs in the air so as to improve the endurance time of the whole swarm;
- (3)
- Energy and signal transmission at the same time. A laser or microwave could simultaneously transmit energy and signals. LWPT or MWPT technology can be used to supply power for UAVs while transmitting necessary information, to realize the simultaneous transmission of energy and signal, which can be used to promote intelligent networking.
4. Solar-Powered UAV
4.1. Introduction of Solar-Powered UAV
Solar-powered UAV refers to the aircraft that converts solar energy into electrical energy to provide energy for the whole aircraft [58,59]. When a solar-powered UAV is flying at the height of the stratosphere, it can be completely unaffected by the weather. The solar energy is converted into electricity during the daytime, and some of the converted energy is used for flight while the others are stored in the battery. In a solar-powered UAV, all energy that the UAV uses is electricity from a battery or from a solar panel. The stored energy can be used at night and in weak-radiation conditions. The whole process is cycled when the sun rises the next day. The solar-powered UAV can be used in groping information, surveillance, reconnaissance and Internet relay, so it was studied by institutions and schools all over the world. A solar-powered UAV is not powered by conventional fossil fuels but by electricity from the sun and can stay aloft for months or even years, making it a kind of WPT technology in this special area.
4.2. Development of Solar-Powered UAV
The first recorded solar-powered UAV in the world was Sunrise I, which was developed by the American Astro Flight Company for DARPA. It was successfully tested in 1974 with an output power of 450 W but was destroyed by sandstorms during the test flight. The improved Sunrise II UAV was developed and flown in 1975 [60].
Germany is also an early adopter of solar-powered UAVs. In 1976, Solaris Solar Drone successfully flew [61]. In 1998, the Deutsches Zentrum für Luftund Raumfahrt (DLR) and the Technical University of Munich completed the test flight of the Solitair solar UAV concept model, whose solar panel angle can be adjusted to maximize the use of solar radiation [62].
NASA started the ERAST program (Environmental Research Aircraft and Sensor Technology) in the 1990s to develop long-endurance unmanned aerial vehicles. With the support of the program, four generations of solar-powered UAVs have been developed, as shown in Figure 14.
The first solar-powered UAV Pathfinder was developed in 1993. It had a wingspan of 29.5 m and weighed 252 kg. Solar cells on the wings provided 7.5 kW of power. It was driven by six 1.5 kW propellers and flew at an altitude of 21,802 m. The second-generation solar-powered UAV Pathfinder Plus was developed in 1997. The wingspan was 36.3 m, and it was powered by eight electric motors. Solar cells on the wings could generate 12.6 kW of power and fly at an altitude of 24,445 m. The third generation Centurion solar-powered UAV was developed in 1998. The wingspan was 63 m, and it was powered by 14 electric motors with a maximum solar output of 31 kW. The fourth generation Helios solar-powered UAV was successfully developed in 2001. The wingspan was 75.3 m. During the flight, fourteen propellers of 1.5 kW on the wings were used to drive the UAV, and it flew at an altitude of 29,524 m [63].
In 2005, AC Propulsion pioneered the SoLong solar UAV with a wingspan of 4.75 m and a weight of 12.6 kg. It managed to fly for 48 h and 16 min, which was the first long-endurance UAV [64].
Form 2001, the British QinetiQ company started the development of the Zephyr series solar-powered UAV, which received the attention with the financial support of the British Ministry of Defense and the US Department of Defense. The Zephyr 7, with a wingspan of 22.5 m and a weight of 53 kg, flew at an altitude of 21,000 m. It managed to fly for 336 h and 22 min in 2010, breaking the flight duration record [65]. The latest flight test of the Zephy-series UAV, Zephyr S, was performed on 13 September 2021, landing in Arizona. In the test, the UAV flew in the stratosphere at an altitude of 23,000 m for more than 860 h [66].
In 2004, the Automatic Control Systems Laboratory of ECOLE Poly technique Federale in Lausanne and ETH Zurich, in collaboration with the European Space Agency (ESA), developed Sky-Sailor solar-powered UAV with a wingspan of 3.2 m [67]. In 2010, Solar-Impulse was successfully developed with a wingspan of 63.4 m [68]. In 2015, Solar-Impulse 2 was successfully developed. Its overall layout was basically the same as that of Solar-Impulse, with a wingspan of 72 m and a weight of 2.3 tons. Its flying range was up to 43,000 km with solar power. In 2015, ETH Zurich developed Atlantiksolar solar-powered UAV, with a wingspan of 5.69 m and weight of 6.93 kg, which achieved a continuous flight of 81 h and 26 min, setting a record for the longest flight time of fixed-wing aircraft under 50 kg, as shown in Figure 15 [69,70].
In 2011, DLR made a preliminary test flight of the Electric High Altitude Solar Powered Aircraft (ELHASPA), with a wingspan of 23 m and weight of 100 kg, in which two 2 kW motors were used to provide power [71].
Many Internet companies have also conducted a series of studies on solar-powered drones. In 2013, Titan Aerospace launched the solar-powered Solara UAV research program [72]. In 2014, Google acquired Titan Aerospace and tested the Solara50 solar-powered drone, which crashed during testing in 2015 [73]. In 2016, Facebook developed its Aquila solar-powered drone, which was damaged during its first test flight. The modified version flew successfully in 2017 [74].
In 2015, the Korea Aerospace Research Institute (KARI) developed the solar-powered UAV EVA-3. With a wingspan of 20 m and a weight of 53 kg, it flew continuously for 9 h and reached a maximum altitude of 14.3 km [75].
In 2017, the Russian Advanced Research Foundation (ARF) developed Owl Solara UAV, with a wingspan of 9.5 m and a weight of 12 kg. It successfully landed after a continuous 50-h flight test [76].
In 2017, the Aviation Industry Corporation of China (AVIC) developed Qi Ming Xing solar-powered UAV with a wingspan of 10 m. In 2018, the wingspan was further expanded to 20 m while the weight was only 18.9 kg. During the test, the flight altitude was 20,000 m, and the flight time lasted for five hours in the air [77]. On 3 November 2021, Qi Ming Xing flew successfully for the whole test.
According to the research works above, comparisons of solar-powered UAVs are shown in Table 3. The challenges and prospects of solar-powered UAVs can be summarized in the following.
4.3. Challenges of Solar-Powered UAV
As can be seen from the aforementioned development, there were many research achievements for solar-powered UAVs, and some prototypes were successfully developed. It could realize truly wireless power transfer, but solar-powered UAVs still face the following challenges:
- (1)
- Energy conversion efficiency and energy storage efficiency needs to be improved. In a solar-powered UAV, photovoltaic cells, which convert solar energy into electricity, and batteries, which store the energy, are the core components. At present, the conversion efficiency of photovoltaic cells is extremely limited, generally less than 20%. The energy density of batteries is also very limited, generally less than 300 Wh/kg [78]. In order to achieve the maximum payload and maximum endurance of solar-powered UAVs, photovoltaic panels and batteries tend to account for most of the weight. Therefore, how to improve the conversion efficiency of energy storage conversion is a major challenge;
- (2)
- Aerodynamic design with a low Reynolds coefficient should be concerned. In order to reduce the energy consumption of solar-powered UAVs during flight, it is necessary to reduce the wing load and improve the aerodynamic efficiency of the aircraft. At present, solar-powered UAVs fly at a higher altitude, but at a slower speed, so solar UAVs are flying under the condition of a low Reynolds coefficient. A low Reynolds coefficient will reduce the lifting efficiency and increase the energy loss of the aircraft. Therefore, it is necessary to study the aerodynamic design of solar-powered UAVs under a low Reynolds coefficient;
- (3)
- The optimization design of the ultra-light material structure should be improved. For solar-powered UAVs, the plane needs to be covered with as many photovoltaic panels as possible because of the low energy density of solar energy. In order to maximize payload and energy storage, the wingspan is as large as possible. In order to solve this problem, optimization can be carried out not only from the photovoltaic panels but also from the materials and structures. In terms of structure, it is necessary to optimize the structure design as much as possible, improving lift and reducing resistance, and carrying out variant solar UAV designs. In terms of materials, light and strong materials should be selected as far as possible to deal with complex conditions such as vibration under complex conditions.
4.4. Prospect of Solar-Powered UAV
As the most mature WPT technology in UAV wireless charging, the application prospects of solar-powered UAVs are as follows:
- (1)
- Stay during a long voyage. Solar-powered UAVs store electric energy in sunny conditions during the day and use the stored electric energy at night, so they can fly nonstop for a long time and then stay at a high altitude. At this point, it can be used for patrol detection, electronic detection interference and other occasions;
- (2)
- High altitude operation. It is difficult for traditional powered aircraft to operate at an altitude of 20,000 m. Earth-orbit satellite generally operates at an altitude of 100,000 m, while general solar-powered UAVs can operate at an altitude of more than 20,000 m. Therefore, solar-powered aircraft can be used for near-space flights. At this point, solar-powered UAVs can be used for aerial image monitoring, upper warning and so on;
- (3)
- Information relay. Solar-powered UAVs can be used not only in the military field but also in the civilian field. In some remote areas, poor signal and difficult conditions make it difficult to set up mobile base stations. Flood and earthquake areas also cause base station damage and network signal terminal problems. In these scenarios, solar-powered planes could be used as relays to improve network quality.
5. Discussion
Among WPT technologies suitable for UAV charging, the developments of different types of WPT technology are different and can be concluded as follows. IWPT and MCR-WPT technologies, which are called near-field WPT technologies, are the most widely researched technologies and have been used in consumer electronics, electric vehicle charging and other practical applications. However, the limited transmission range and the strong working electromagnetic environment of these two WPT technologies limit their use in UAV charging. LWPT and MWPT technologies are born to be used for UAV wireless charging, where researchers have hoped to use them to enable UAVs to operate over long distances. However, these two WPT technologies are still under development due to limitations in transmission distance, power and efficiency. The solar-powered UAV is the most well-developed application in the aviation field, which has been researched by different companies and universities in different countries, with some developments and prototypes being created. Some of the solar-powered UAVs even have a continuous flight in the air for up to ten days. By analyzing several WPT technologies, the current applications of various radio energy transmission technologies in aviation can be summarized as shown in Table 4.
In terms of transmission distance, the transmission distance of IWPT and MCR-WPT technologies is generally less than 1 m, which suggests that using these two WPT technologies to charge UAVs in flight is almost impossible. LWPT and MWPT technologies can achieve transmission distances of hundreds of meters or even several thousand meters in some cases or in experiments in other research areas. However, the limited efficiency of laser and microwave generation, transmission and conversion restrict the power transmission, so large-scale applications have not been achieved yet. Solar-powered UAVs convert solar energy into electrical energy without the additional transmitter, allowing for power outputs of several tens of kilowatts for truly wireless charging and long flight times.
However, it does not mean that it is sufficient to research and develop only solar-powered UAVs and abandon research into other technologies. Solar-powered UAVs are aircraft with large wingspans, large volumes, large weights and fixed wings in terms of UAV types. It is due to the limited conversion efficiency of current photovoltaic panels, which generally do not exceed 20%. In order to achieve high power output, a large number of photovoltaic panels need to be used and plastered all over the surface of the UAVs due to this limitation. In practice, small rotary-wing UAVs are also an important branch. At present, the endurance of rotary-wing UAVs is about several ten minutes, which greatly limits their operating range. It is not practical to spread solar panels all over their surface because of the small size and load of rotary-wing UAVs. Therefore, laser-based and microwave-based wireless charging technologies are important research directions that can greatly enhance the range of UAVs as long as they are within their reach. However, both of these wireless power transfer technologies still require further research before they can be truly applied in aviation, particularly to study dynamic tracking power. Although IWPT and MCR-WPT technologies are limited by the transmission distance and cannot be used to wireless power aircraft in flight, these two wireless charging technologies are more mature and can be used for high-power wireless charging of UAVs at a static state or for wireless power supply between rotating devices within the aircraft. In addition, near-field WPT technology can be used to power UAVs to create a network and realize energy routing.
In summary, although wireless power transfer technology currently has limited applications in aviation, it needs to be further developed to enable long flight times in aircraft.
6. Conclusions
Using wireless power transfer technologies to power UAVs can increase the working range. This paper focused on a review and prospect of several different wireless power transfer technologies for UAV charging. The development, challenges and future prospects were discussed for near-field WPT technology, far-field WPT technology and solar-powered UAV. Although some of the WPT technologies are currently immature in the aviation field, various wireless power transfer technologies have clear prospects for application in the aviation field and have greater potential for development through comparative analysis and discussion.
Author Contributions
Conceptualization, methodology, and writing—original draft preparation, M.W. and L.S.; writing—review and editing, J.C. and D.W.; supervision, Y.C., X.D. and Y.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by China Postdoctoral Science Foundation, grant number 2022M711993.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Sohail, M.F.; Leow, C.Y.; Won, S. Energy-Efficient Non-Orthogonal Multiple Access for UAV Communication System. IEEE Trans. Veh. Technol. 2019, 68, 10834–10845. [Google Scholar] [CrossRef]
- Molinari, G.; Arrieta, A.F.; Ermanni, P. Aero-structural optimization of three-dimensional adaptive wings with embedded smart actuators. AIAA J. 2014, 52, 1940–1951. [Google Scholar] [CrossRef]
- Yokozeki, T.; Sugiura, A.; Hirano, Y. Development of variable camber morphing airfoil using corrugated structure. J. Aircr. 2014, 51, 1023–1029. [Google Scholar] [CrossRef] [Green Version]
- Luo, B.; Long, T.; Guo, L.; Dai, R.; Mai, R.; He, Z. Analysis and Design of Inductive and Capacitive Hybrid Wireless Power Transfer System for Railway Application. IEEE Trans. Ind. Appl. 2022, 56, 3034–3042. [Google Scholar] [CrossRef]
- Wu, M.; Su, L.; Chen, X.; Duan, X.; Wu, D.; Jiang, Y. Transferring power and data simultaneously of different direction in ultrasonic contactless power transfer system. Energy Rep. 2022, 8, 72–80. [Google Scholar] [CrossRef]
- Luo, B.; Hu, A.P.; Munir, H.; Zhu, Q.; Mai, R.; He, Z. Compensation Network Design of CPT Systems for Achieving Maximum Power Transfer Under Coupling Voltage Constraints. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 138–148. [Google Scholar] [CrossRef]
- Wu, M.; Chen, X.; Qi, C.; Mu, X. Considering Losses to Enhance Circuit Model Accuracy of Ultrasonic Wireless Power Transfer System. IEEE Trans. Ind. Electron. 2019, 67, 8788–8798. [Google Scholar] [CrossRef]
- Brown, W. The History of Wireless Power Transmission. Sol. Energy 1996, 56, 3–21. [Google Scholar] [CrossRef]
- Zhang, Z.; Pang, H.; Georgiadis, A.; Cecati, C. Wireless Power Transfer—An Overview. IEEE Trans. Ind. Electron. 2019, 66, 1044–1058. [Google Scholar] [CrossRef]
- Fan, X.; Gao, L.; Mo, X. Overview of Research Status and Applicationof Wireless Power Transmission Technology. Trans. China Electrotech. Soc. 2019, 34, 1353–1380. [Google Scholar]
- Xue, M.; Yang, Q.; Zhang, P. Application Status and Key Issues of Wireless Power Transmission Technology. Trans. China Electrotech. Soc. 2021, 36, 1547–1568. [Google Scholar]
- Wu, M. Modeling Analysis and Experimental Validations of Electrical—Contactless Power Combined with Data Transfer Based on Ultrasonic Wave. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar]
- Sheng, X.; Shi, L. An Improved Pulse Density Modulation Strategy Based on Harmonics for ICPT System. IEEE Trans. Power Electron. 2020, 35, 6810–6819. [Google Scholar] [CrossRef]
- Xia, C.; Jia, R.; Wu, Y.; Yu, Q.; Zhou, Y. Wireless Power and Information Transmission Technology based on Fundamental-harmonic component for Single-channel and Two-coil ICPT System. IET Power Electron. 2019, 12, 2608–2614. [Google Scholar] [CrossRef]
- Xia, C.; Wei, N.; Zhang, H.; Zhao, S.; Li, Z.; Liao, Z. Multifrequency and Multiload MCR-WPT System Using Hybrid Modulation Waves SPWM Control Method. IEEE Trans. Power Electron. 2021, 36, 12400–12412. [Google Scholar] [CrossRef]
- Huang, X.; Lu, C.; Liu, M. Calculation and analysis of near-field magnetic spiral metamaterials for MCR-WPT application. Appl. Phys. A 2020, 126, 6688–6698. [Google Scholar] [CrossRef]
- Li, S.; Zhou, M.; Chen, X.; Liu, F. Parameters Optimization for Zero-Voltage-Switching Realization in LCCL-LC Compensated MCR WPT Systems. In Proceedings of the 2020 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Seoul, Korea, 15–19 November 2020; pp. 123–128. [Google Scholar]
- Xiao, L.; Lu, X.; Xu, D.; Tang, Y.; Wang, L.; Zhuang, W. UAV Relay in VANETs Against Smart Jamming With Reinforcement Learning. IEEE Trans. Veh. Technol. 2018, 67, 4087–4097. [Google Scholar] [CrossRef]
- Campi, T.; Dionisi, F.; Cruciani, S.; De Santis, V.; Feliziani, M.; Maradei, F. Magnetic field levels in drones equipped with Wireless Power Transfer technology. In Proceedings of the 2016 Asia-Pacific International Symposium on Electromagnetic Compatibility (APEMC), Shenzhen, China, 17–21 May 2016; pp. 544–547. [Google Scholar]
- Aldhaher, S.; Mitcheson, P.D.; Arteaga, J.M.; Kkelis, G.; Yates, D.C. Light-weight wireless power transfer for mid-air charging of drones. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017; pp. 336–340. [Google Scholar]
- Ke, D.; Liu, C.; Jiang, C.; Zhao, F. Design of an effective wireless air charging system for electric unmanned aerial vehicles. In Proceedings of the IECON 2017—43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October 2017; pp. 6949–6954. [Google Scholar]
- Wireless Power Solutions for Robotic Systems|WiBotic|Seattle, WA [EB/OL]. Available online: https://www.wibotic.com/ (accessed on 7 September 2019).
- Yang, C.; He, Y.; Qu, H.; Wu, J.; Hou, Z.; Lin, Z.; Cai, C. Analysis, design and implement of asymmetric coupled wireless power transfer systems for unmanned aerial vehicles. AIP Adv. 2019, 9, 025206. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Cruciani, S.; Maradei, F.; Feliziani, M. Wireless charging system integrated in a small unmanned aerial vehicle (UAV) with high tolerance to planar coil misalignment. In Proceedings of the 2019 Joint International Symposium on Electromagnetic Compatibility, Sapporo and Asia-Pacific International Symposium on Electromagnetic Compatibility, Sapporo, Japan, 3–7 June 2019; pp. 601–604.
- Park, C.; Park, J.; Shin, Y.; Kim, J.; Huh, S.; Kim, D.; Ahn, S. Separated Circular Capacitive Coupler for Reducing Cross-Coupling Capacitance in Drone Wireless Power Transfer System. IEEE Trans. Microw. Theory Tech. 2020, 68, 3978–3985. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, B.; Xiao, W.; Qiu, D.; Chen, Y. Nonlinear Parity-Time-Symmetric Model for Constant Efficiency Wireless Power Transfer: Application to a Drone-in-Flight Wireless Charging Platform. IEEE Trans. Ind. Electron. 2019, 66, 4097–4107. [Google Scholar] [CrossRef]
- Song, K.; Zhang, P.; Chen, Z.; Yang, G.; Jiang, J.; Zhu, C. A High-Efficiency Wireless Power Transfer System for Unmanned Aerial Vehicle Considering Carbon Fiber Body. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications, Lyon, France, 7–11 September 2020; pp. 1–7. [Google Scholar]
- Jawad, A.M.; Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Abdullah, N.F.; Abu-Alshaeer, M.J. Wireless Power Transfer With Magnetic Resonator Coupling and Sleep/Active Strategy for a Drone Charging Station in Smart Agriculture. IEEE Access 2019, 7, 139839–139851. [Google Scholar] [CrossRef]
- Cai, C.; Wu, S.; Jiang, L.; Zhang, Z.; Yang, S. A 500-W Wireless Charging System With Lightweight Pick-Up for Unmanned Aerial Vehicles. IEEE Trans. Power Electron. 2020, 35, 7721–7724. [Google Scholar] [CrossRef]
- Zhou, W.; Jin, K.; Wang, M.; Wu, Q. Efficiency Evaluation of Laser Based Wireless Power Transmission System. In Proceedings of the 2020 IEEE Applied Power Electronics Conference and Exposition (APEC), New Orleans, LA, USA, 15–19 March 2020; pp. 3147–3150. [Google Scholar]
- Lim, Y.; Choi, Y.W.; Ryoo, J. Study on Laser-Powered Aerial Vehicle: Prolong Flying Time Using 976nm Laser Source. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 20–22 October 2021; pp. 1220–1225. [Google Scholar]
- Duncan, K.J. Laser based power transmission: Component selection and laser hazard analysis. In Proceedings of the 2016 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Knoxville, TN, USA, 4–6 October 2016; pp. 100–103. [Google Scholar]
- An, C.; Kwon, H.M.; Ryu, H.-G. Lowest-In First-Service System for the Efficient MPT (Microwave Power Transfer) to Multiple Receivers. In Proceedings of the 2021 International Conference on Information Networking (ICOIN), Jeju Island, Korea, 13–16 January 2021; pp. 594–596. [Google Scholar]
- Li, B.; Liu, S.; Zhang, H.L.; Hu, B.J.; Zhao, D.; Huang, Y. Wireless Power Transfer Based on Microwaves and Time Reversal for Indoor Environments. IEEE Access 2019, 7, 114897–114908. [Google Scholar] [CrossRef]
- Dang, K.; Zhang, J.; Zhou, H.; Huang, S.; Zhang, T.; Bian, Z.; Hao, Y. A 5.8-GHz High-Power and High-Efficiency Rectifier Circuit With Lateral GaN Schottky Diode for Wireless Power Transfer. IEEE Trans. Power Electron. 2020, 35, 2247–2252. [Google Scholar] [CrossRef]
- Brown, W.; Mims, J.; Heenan, N. An experimental microwave-powered helicopter. In Proceedings of the 1958 IRE International Convention Record, New York, NY, USA, 21–25 March 1966; pp. 225–235. [Google Scholar]
- Schlesak, J.J.; Alden, A.; Ohno, T. A microwave powered high altitude platform. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, New York, NY, USA, 25–27 May 1988; pp. 283–286. [Google Scholar]
- Kaya, N.; Matsumoto, H. METS Rocket Experiment and MILAX Airplane Demonstration. J. Space Technol. Sci. 1992, 8, 2_16–2_21. [Google Scholar]
- Matsumoto, H. Research on solar power satellites and microwave power transmission in Japan. IEEE Microw. Mag. 2002, 3, 36–45. [Google Scholar] [CrossRef]
- Shinohara, N. Recent wireless power transmission via microwave and millimeter-wave in Japan. In Proceedings of the 2012 42nd European Microwave Conference, Amsterdam, The Netherlands, 29 October 2012; pp. 1347–1350. [Google Scholar]
- Tanaka, K.; Maki, K.; Takahashi, M.; Sasaki, S. Microwave power transmission experiment using breadboard model for small scientific satellite toward SPS. In Proceedings of the 2012 International Conference on Electromagnetics in Advanced Applications, Cape Town, South Africa, 2–7 September 2012. pp. 666–669.
- MHI Successfully Completes Ground Demonstration Testing of Wireless Power Transmission Technology for SSPS—Expanding the Potential for New Industrial Applications. Available online: https://www.mhi.com/news/1503121879.html (accessed on 12 March 2022).
- Blackwell, T. Recent demonstrations of laser power beaming at DFRC and MSFC. In AIP Conference Proceedings Beamed Energy Propulsion. Third International Symposium on Beamed Energy Propulsion; American Institute of Physics: College Park, MD, USA, 2005; pp. 73–85. [Google Scholar]
- Kawashima, N.; Takeda, K.; Yabe, K. Application of the laser energy transmission technology to drive a small airplane. Chin. Opt. Lett. 2007, 5, 109–110. [Google Scholar]
- Becker, D.E.; Chiang, R.; Keys, C.C. Photovoltaic concentrator based power beaming for space elevator application. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2010; pp. 271–281. [Google Scholar]
- AUVSI: LaserMotive, Lockheed Demonstrate Real-World Laser Power. 2012. Available online: https://www.flightglobal.com/news/articles/auvsi-lasermotive-lockheed-demonstrate-real-world-laser-375166/ (accessed on 12 March 2015).
- Sprangle, P.; Hafizi, B.; Ting, A.; Fischer, R. High-power lasers for directed-energy applications. Appl. Opt. 2015, 54, 336–345. [Google Scholar] [CrossRef]
- Rodenbeck, C.T.; Tierney, B.B.; Park, J.; Parent, M.G.; DePuma, C.B.; Bauder, C.J.; Mayhan, T. Terrestrial Microwave Power Beaming. IEEE J. Microw. 2022, 2, 28–43. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, L.; Ma, H.; Wang, Z.; Wang, Y.; Cui, Z. Research on Wireless Power transmission system between satellites. In Proceedings of the 2016 IEEE Wireless Power Transfer Conference (WPTC), Aveiro, Portugal, 5–6 May 2016; pp. 1–4. [Google Scholar]
- Hanbrin, D. The U.S. Army is Building a Laser Powered Drone That Can Fly Indefinitely. New Scientist. Available online: https://www.newscientist.com/article/2178470-the-us-army-is-making-a-laser-powered-drone-that-can-fly-indefinitely/ (accessed on 3 September 2018).
- Treusch, G.; Koenning, T.; Shelef, B. High-power diode lasers boost power-beaming competition. Laser Focus World 2008, 44, 75–79. [Google Scholar]
- Mori, M.; Kagawa, H.; Saito, Y. Summary of studies on space solar power systems of Japan Aerospace Exploration Agency (JAXA). Acta Astronaut. 2006, 59, 132–138. [Google Scholar] [CrossRef]
- Ortabasi, U.; Friedman, H.W. Powersphere: A novel photovoltaic cavity converter using low bandgap tpv cells for efficient conversion of high power laser beams to electricity. In AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2004; pp. 142–152. [Google Scholar]
- Tao, H.; Zhang, H.; Yang, S.; Zhao, C.; Zhang, Y. Efficient Monolithic Multi-cell GaAs Converter for High Power Space Laser Transmission. In Proceedings of the Asia Communications and Photonics Conference, Beijing, China, 12–15 November 2013; p. AF2H-7. [Google Scholar]
- Zhou, W.; Ke, J. Efficiency optimization inject current characteristic of laser diode for wireless power transmission, 2015. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, , 20–24 September 2015; pp. 3082–3086. [Google Scholar]
- Zhang, T.; Zhu, X.; Zhou, Z.; Wang, R.; Chen, R. Energy Management of Solar UAV Level Flight. In Proceedings of the 2018 IEEE International Conference on Prognostics and Health Management (ICPHM), Seattle, WA, USA, 11–13 June, 2018; pp. 1–6. [Google Scholar]
- Kim, S.H.; Padilla, G.E.G.; Yu, K.H. Verification of energy model of solar-powered UAV using virtual flight evaluation. International Conference on Control. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems, Jeju, Korea, 18–21 October 2017; pp. 1087–1090. [Google Scholar]
- MacCready, P.B.; Lissaman, P.B.S.; Morgan, W.R.; Burke, J.D. Sun-powered aircraft designs. J. Aircr. 1983, 20, 487–493. [Google Scholar] [CrossRef]
- Noth, A.; Siegwart, R.; Engel, W. Design of Solar Powered Airplanes for Continuous Flight. Environ. Res. 2007. Available online: https://asl.ethz.ch/content/dam/ethz/special-interest/mavt/robotics-n-intelligent-systems/asl-dam/documents/projects/Design_Skysailor.pdf (accessed on 24 June 2022).
- Tozer, T.; Grace, D.; Thompson, J.; Baynham, P. UAVs and HAPs-potential convergence for military communications. In Proceedings of the IEE Colloquium on Military Satellite Communications, London, UK, 6 June 2000. [Google Scholar]
- Noll, T.E.; Brown, J.M.; Perez-Davis, M.E.; Ishmael, S.D.; Tiffany, G.C.; Gaier, M. Investigation of the Helios prototype aircraft mishap volume I mishap report. Downloaded 2004, 9, 2004. [Google Scholar]
- Cocconi, A. AC propulsion’s Solar Electric powered solong UAV. AC Propuls. Tech. Rep. 2005. Available online: https://xpda.com/junkmail/junk173/ACP_SoLong_Solar_UAV_2005-06-05.pdf (accessed on 24 June 2022).
- Rapinett, A. Zephyr: A high Altitude Long Endurance Unmanned Air Vehicle. Ph.D. Thesis, Department of Physics, University of Surrey, Guildford, UK, 2009. [Google Scholar]
- Available online: https://www.airforce-technology.com/news/zephyr-s-completes-2021-test-flight-campaign/ (accessed on 12 October 2021).
- Airbus, Inc. Zephyr 2021 Test Flight Campaign [EB/OL]. Available online: https://www.airbus.com/virtual.html?uuid=13bdef12-0691-4fd5-8ca1-371df5078350&title=Zephyr2021-Test-Flight-Campaign-. (accessed on 11 October 2021).
- Noth, A.; Bouabdallah, S.; Michaud, S.; Siegwart, R.; Engel, W. SKY-SAILOR Design of an autonomous solar powered martian airplane. In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA 2004) ESTEC, Noordwijk, The Netherlands, 2–4 November 2004; p. F-03. [Google Scholar]
- SA. Solar Impulse Foundation [EB/OL]. Available online: https://solarimpulse.com (accessed on 21 July 2022).
- Oettershagen, P.; Melzer, A.; Mantel, T.; Rudin, K.; Stastny, T.; Wawrzacz, B.; Siegwart, R. Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight. J. Field Robot. 2017, 34, 1352–1377. [Google Scholar] [CrossRef] [Green Version]
- Wirth, L.; Oettershagen, P.; Ambühl, J.; Siegwart, R. Meteorological path planning using dynamic programming for a solar-powered UAV. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar] [CrossRef] [Green Version]
- Klöckner, A.; Leitner, M.; Schlabe, D.; Looye, G. Integrated modelling of an unmanned high-altitude solar-powered aircraft for control law design analysis. In Advances in Aerospace Guidance, Navigation and Control; Springer: Berlin,/Heidelberg, Germany, 2013; pp. 535–548. [Google Scholar]
- Google to Buy Titan Aerospace as Web Giants Battle for Air Superiority. Available online: http://www.wsj.com/articles/SB10001424052702304117904579501701702936522 (accessed on 14 April 2014).
- Cellan-Jones. Facebook’s Drones—Made in Britain. Available online: https://www.bbc.com/news/technology-36855168 (accessed on 21 July 2016).
- Hwang, S.J.; Kim, S.G.; Lee, Y.G. Developing High Altitude Long Endurance (HALE) Solar-powered Unmanned Aerial Vehicle (UAV). J. Aerosp. Syst. Eng. 2016, 10, 59–65. [Google Scholar] [CrossRef] [Green Version]
- Arctic-Capable: Atmospheric Solar-Powered SOVA Drone Passes Tough Test (VIDEO). Available online: https://www.rt.com/news/354642-arctic-atmospheric-satellite-sova/ (accessed on 4 August 2016).
- Available online: https://www.scmp.com/news/china/military/article/2171081/chinese-solar-powered-drone-spreads-its-wings-successful-test (accessed on 31 October 2018).
- Camacho, N. Improving Operational Effectiveness of Tactical Long Endurance Unmanned Aerial Systems by Utilizing Solar Power; Naval Postgraduate School: Monterey, CA, USA, 2014. [Google Scholar]
Figure 1.
Working principles of wireless power transfer technology.

Figure 2.
Classification of wireless power transfer technologies.
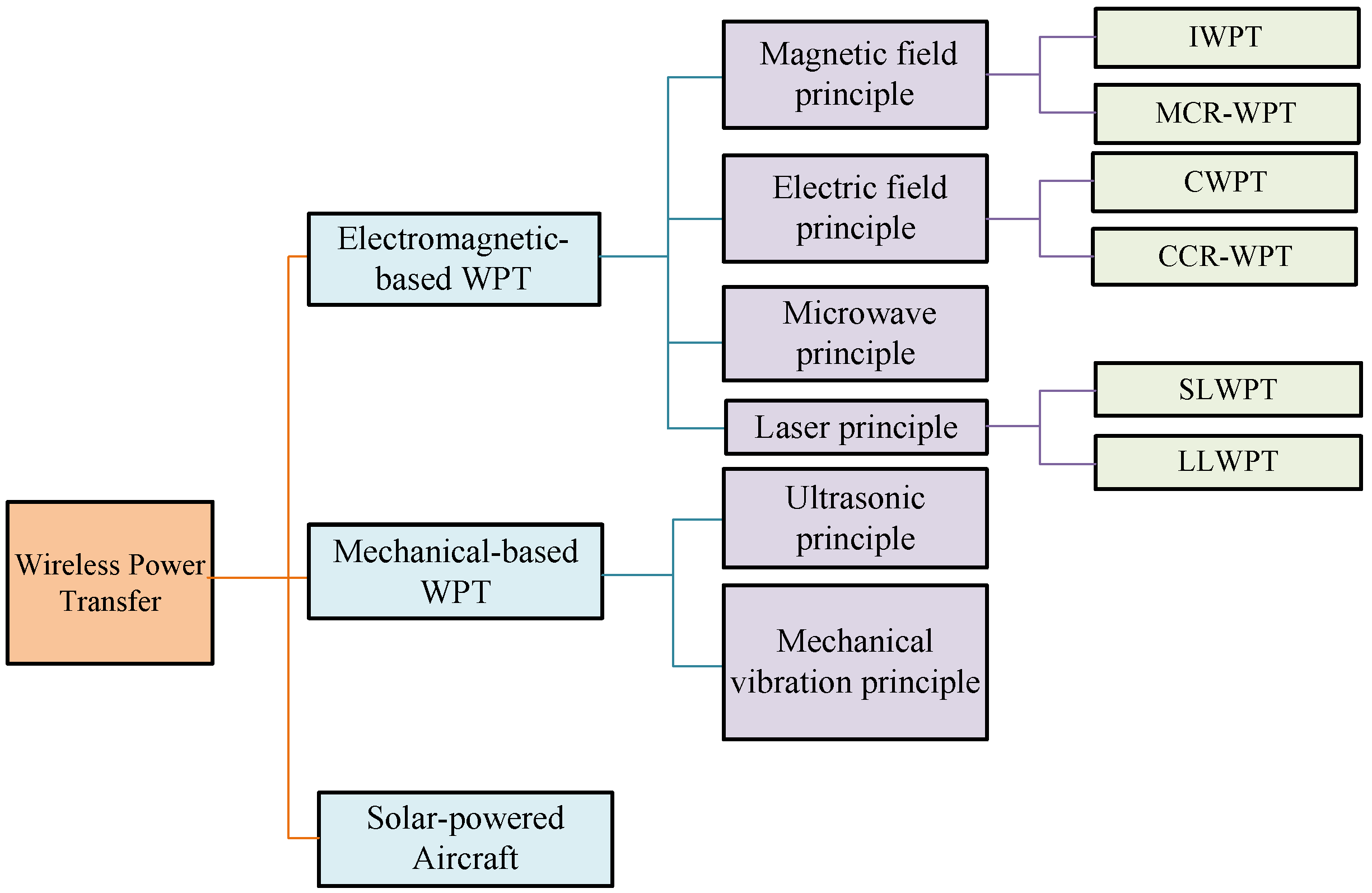
Figure 3.
Basic composition of IWPT and MCR-WPT technologies: (a) Basic principle of IWPT technology; (b) Basic principle of MCR-WPT technology.
Figure 3.
Basic composition of IWPT and MCR-WPT technologies: (a) Basic principle of IWPT technology; (b) Basic principle of MCR-WPT technology.


Figure 4.
UAV with coil on the abdomen. Reproduced with permission from Ref. [21]; published by IEEE, 2016.
Figure 4.
UAV with coil on the abdomen. Reproduced with permission from Ref. [21]; published by IEEE, 2016.

Figure 5.
Wireless charging hovering drone. Reproduced with permission from Ref. [22]; published by IEEE, 2017.
Figure 5.
Wireless charging hovering drone. Reproduced with permission from Ref. [22]; published by IEEE, 2017.

Figure 6.
Variable pitch transmitter coil charging drone. Reproduced with permission from Ref. [23]; published by IEEE, 2017.
Figure 6.
Variable pitch transmitter coil charging drone. Reproduced with permission from Ref. [23]; published by IEEE, 2017.
Figure 7.
Basic principle of LWPT Technology.

Figure 8.
Basic principle of MWPT system.
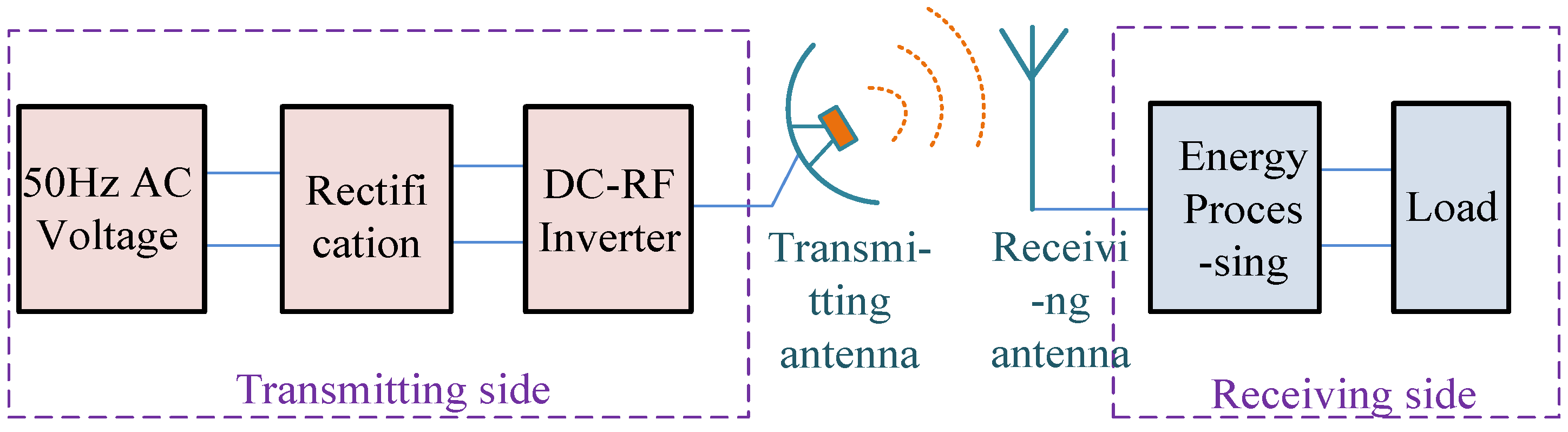
Figure 9.
Experiment of Raytheon. Reproduced with permission from Ref. [38]; published by IEEE, 1965.
Figure 9.
Experiment of Raytheon. Reproduced with permission from Ref. [38]; published by IEEE, 1965.

Figure 10.
UAV designed by SHARP program. Reproduced with permission from Ref. [39]; published by IEEE, 1988.
Figure 10.
UAV designed by SHARP program. Reproduced with permission from Ref. [39]; published by IEEE, 1988.

Figure 11.
NASA uses LWPT technology to power for model UAVs.

Figure 12.
WPT experiment in naval laboratory. Reproduced with permission from Ref. [50]; published by IEEE, 2022. (a) a 5.4-m-diameter parabolicreflector; (b) a linearly actuated horn; (c) a view of the transmitter from the target site 1046 m away.
Figure 12.
WPT experiment in naval laboratory. Reproduced with permission from Ref. [50]; published by IEEE, 2022. (a) a 5.4-m-diameter parabolicreflector; (b) a linearly actuated horn; (c) a view of the transmitter from the target site 1046 m away.

Figure 13.
LWPT experiment of Shandong Aerospace Electronic Technology Research Institute. Reproduced with permission from Ref. [51]; published by IEEE, 2014.
Figure 13.
LWPT experiment of Shandong Aerospace Electronic Technology Research Institute. Reproduced with permission from Ref. [51]; published by IEEE, 2014.

Figure 14.
NASA′s fourth-generation solar-powered drone: (a) Pathfinder drone; (b) Pathfinder Plus drone; (c) Centurion solar-powered drone; (d) Helios drone.
Figure 14.
NASA′s fourth-generation solar-powered drone: (a) Pathfinder drone; (b) Pathfinder Plus drone; (c) Centurion solar-powered drone; (d) Helios drone.

Figure 15.
Atlantiksolar solar-powered drone in Switzerland. Reproduced with permission from Ref. [70]; published by IEEE, 2017.
Figure 15.
Atlantiksolar solar-powered drone in Switzerland. Reproduced with permission from Ref. [70]; published by IEEE, 2017.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of near-field WPT technologies used to power UAV.
| WPT Type | Output Power | Working Frequency | Efficiency | Transmission Distance | Reference |
|---|---|---|---|---|---|
| IWPT | 70 W | 150 kHz | 89% | 10 cm | [21] |
| MCR-WPT | 21 W | 13.56 MHz | - | 10 cm | [22] |
| IWPT | 170 W | 370 kHz | 90% | 15 cm | [23] |
| IWPT | 67.84 W | 364.44 kHz | 57.94% | 50 cm | [25] |
| MCR-WPT | 10 W | 1 MHz | 83.7% | 10.5 cm | [28] |
| IWPT | 500 W | 100 kHz | 90.8% | 10 cm | [30] |
| IWPT | 20.46 W | 12 kHz | 85.36% | 0 cm | [31] |
Table 2.
Comparison of far-field WPT technologies used to power UAV.
| WPT Type | Output Power | Working Frequency | Wavelength | Efficiency | Transmission Distance | Reference |
|---|---|---|---|---|---|---|
| MWPT | 77 W | 2.45 GHz | - | - | 15 m | [38] |
| MWPT | 150 W | 2.45 GHz | - | - | 150 m | [39] |
| MWPT | 1000 W | 2.411 GHz | - | - | 25 m | [40] |
| MWPT | - | - | - | - | 500 m | [44] |
| LWPT | 6 W | - | 940 nm | 1.2% | 15 m | [45] |
| LWPT | 28.4 W | - | 808 nm | 7.2% | 50 m | [46] |
| LWPT | 190 W | - | 1070 nm | 9.5% | 40 m | [49] |
| MWPT | 1600 W | 9.7 GHz | - | 1.8% | 1600 m | [50] |
| LWPT | 13.43 W | - | 808 nm | 16.08% | 100 m | [51] |
Table 3.
Comparison of solar-powered UAV.
| UAV Name | Output Power | Flying Hight | Wingspan | Weight | Flying Time | Reference |
|---|---|---|---|---|---|---|
| Sunrise I | 450 W | 18,000 m | 9.7 m | 12.25 kg | 9 h | [60] |
| Pathfinder | 9 kW | 21,802 m | 29.5 m | 252 kg | - | [63] |
| Pathfinder Plus | 12.6 kW | 24,445 m | 36.3 m | - | - | [63] |
| Centurion | 31 kW | 30,480 m | 63 m | 560 kg | - | [63] |
| Helios | - | 29,594 m | 75.3 m | - | 40 min | [63] |
| SoLong | - | - | 4.75 m | 12.6 kg | 48 h 16 min | [64] |
| Zephyr 7 | - | 21,000 m | 22.5 m | 53 kg | 336 h | [65] |
| Solar-Impulse 2 | - | <85,000 m | 72 m | 2.3 ton | - | [69] |
| Atlaiksolar | 50 W | - | 5.69 m | 6.93 kg | 81 h 26 min | [70] |
| ELHASPA | 4 kW | - | 23 m | 100 kg | - | [71] |
| Solara 50 | - | - | 50 m | 158.9 kg | 4 min | [73] |
| Aquila | - | 27,432 m | 42 m | 399 kg | 91 min | [74] |
| EVA-3 | - | 14,300 m | 20 m | 53 kg | 9 h | [75] |
| OWL | - | - | 9.5 m | 12 kg | 50 h | [76] |
| Qimingxing 20 | - | >20,000 m | 20 m | 18.9 kg | 5 h | [77] |
Table 4.
Comparison of different types of WPT technology.
| WPT Type | IWPT/MCR-WPT | LWPT | MWPT | Solar-Powered UAV |
|---|---|---|---|---|
| Transmission distance | Meter level | Tens of meters | Hundreds of meters | Altitude of 20,000 m |
| Output power | Hundreds of W level | Tens of kW level | ||
| UAV type | Rotary wing | Fixed wing/Rotary wing | Fixed wing/Rotary wing | Fixed wing |
| Current status | Just prototype in laboratory | Prototype for flight | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wu, M.; Su, L.; Chen, J.; Duan, X.; Wu, D.; Cheng, Y.; Jiang, Y. Development and Prospect of Wireless Power Transfer Technology Used to Power Unmanned Aerial Vehicle. Electronics 2022, 11, 2297. https://doi.org/10.3390/electronics11152297
AMA Style
Wu M, Su L, Chen J, Duan X, Wu D, Cheng Y, Jiang Y. Development and Prospect of Wireless Power Transfer Technology Used to Power Unmanned Aerial Vehicle. Electronics. 2022; 11(15):2297. https://doi.org/10.3390/electronics11152297
Chicago/Turabian StyleWu, Maopeng, Lijuan Su, Jianxun Chen, Xiaoli Duan, Donghua Wu, Yan Cheng, and Yu Jiang. 2022. "Development and Prospect of Wireless Power Transfer Technology Used to Power Unmanned Aerial Vehicle" Electronics 11, no. 15: 2297. https://doi.org/10.3390/electronics11152297
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.