

Coordination Control of a Hybrid AC/DC Smart Microgrid with Online Fault Detection, Diagnostics, and Localization Using Artificial Neural Networks



Abstract
:1. Introduction
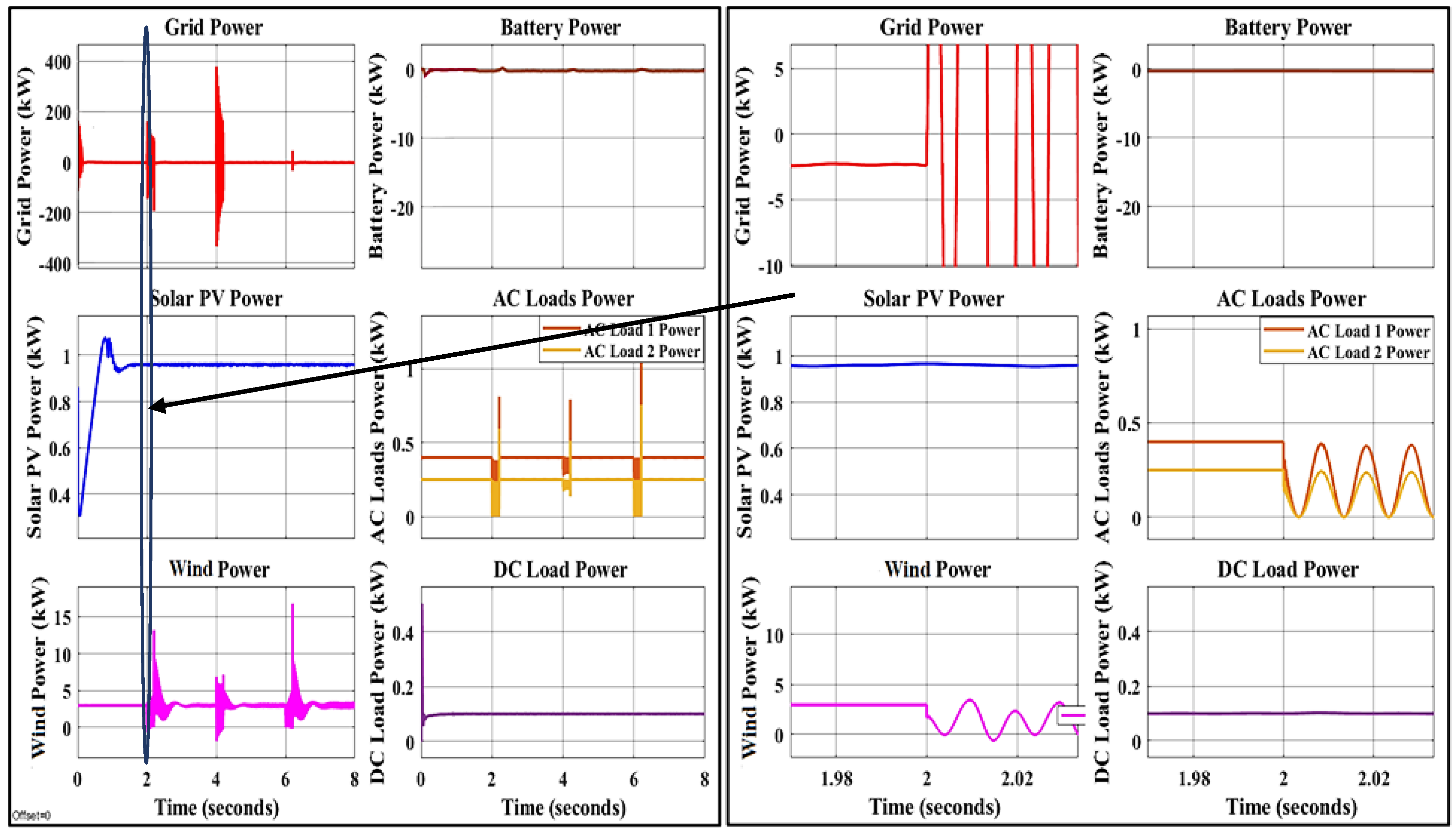
- As a means of reducing DC/AC/DC power electronic conversions, this paper proposes a hybrid AC/DC grid-connected MG with renewable and storage energies. The proposed work addresses the coordination of power flow between the AC bus and DC bus in order to maintain an energy balance between demand and supply and to achieve system stability under a variety of load and generation conditions.
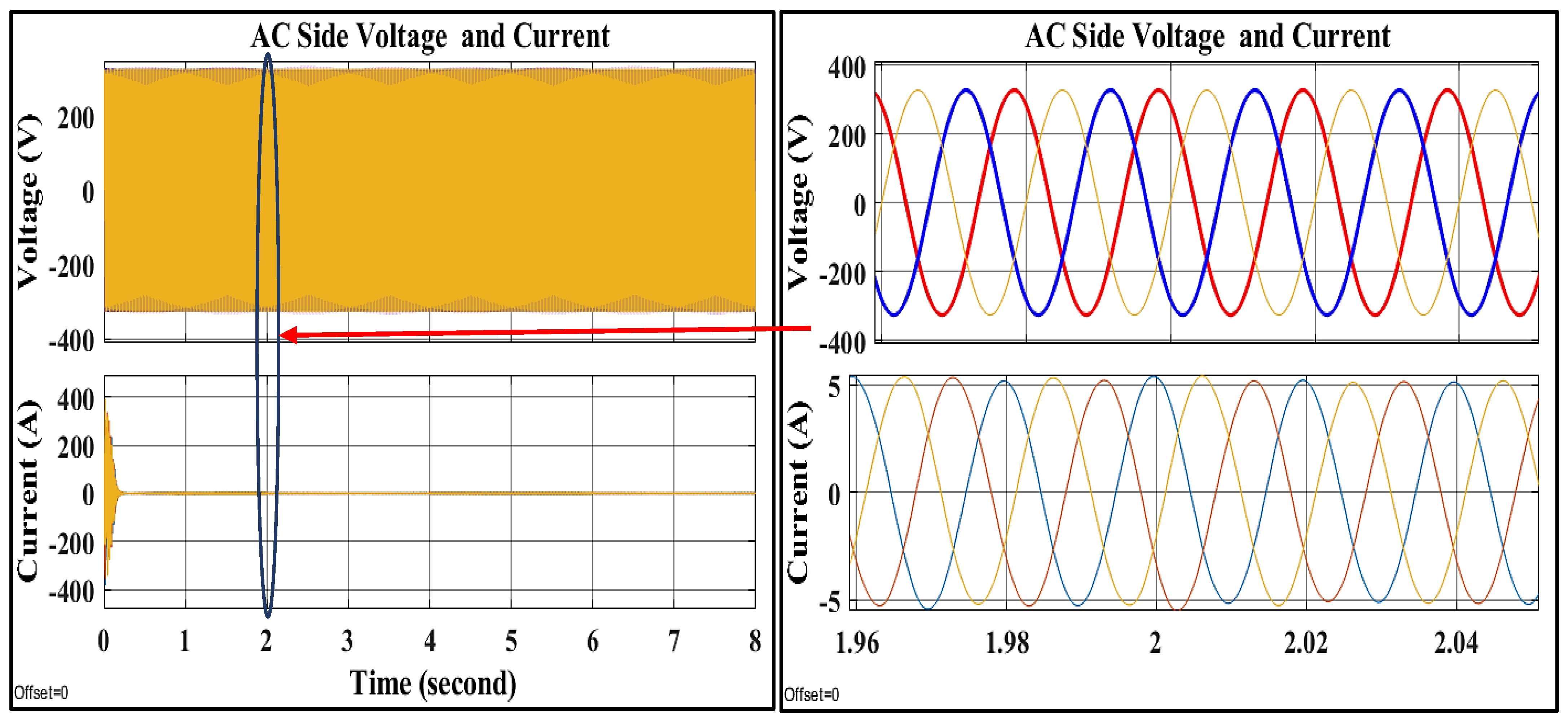
- This paper discusses the design process for an inverter-integrated digital current PR controller in a synchronous reference frame. The resonant and proportional gains as well as resonance path coefficients are all calculated step by step. One of its most important contributions is to make the work of researchers to create digitally controlled inverters easier. This paper will also include a digital PR controller’s frequency-domain analysis. This study used a fictitious w-domain. Digital PR power and current controllers designed using the proposed procedure were used in the case study to demonstrate the inverter’s efficacy.
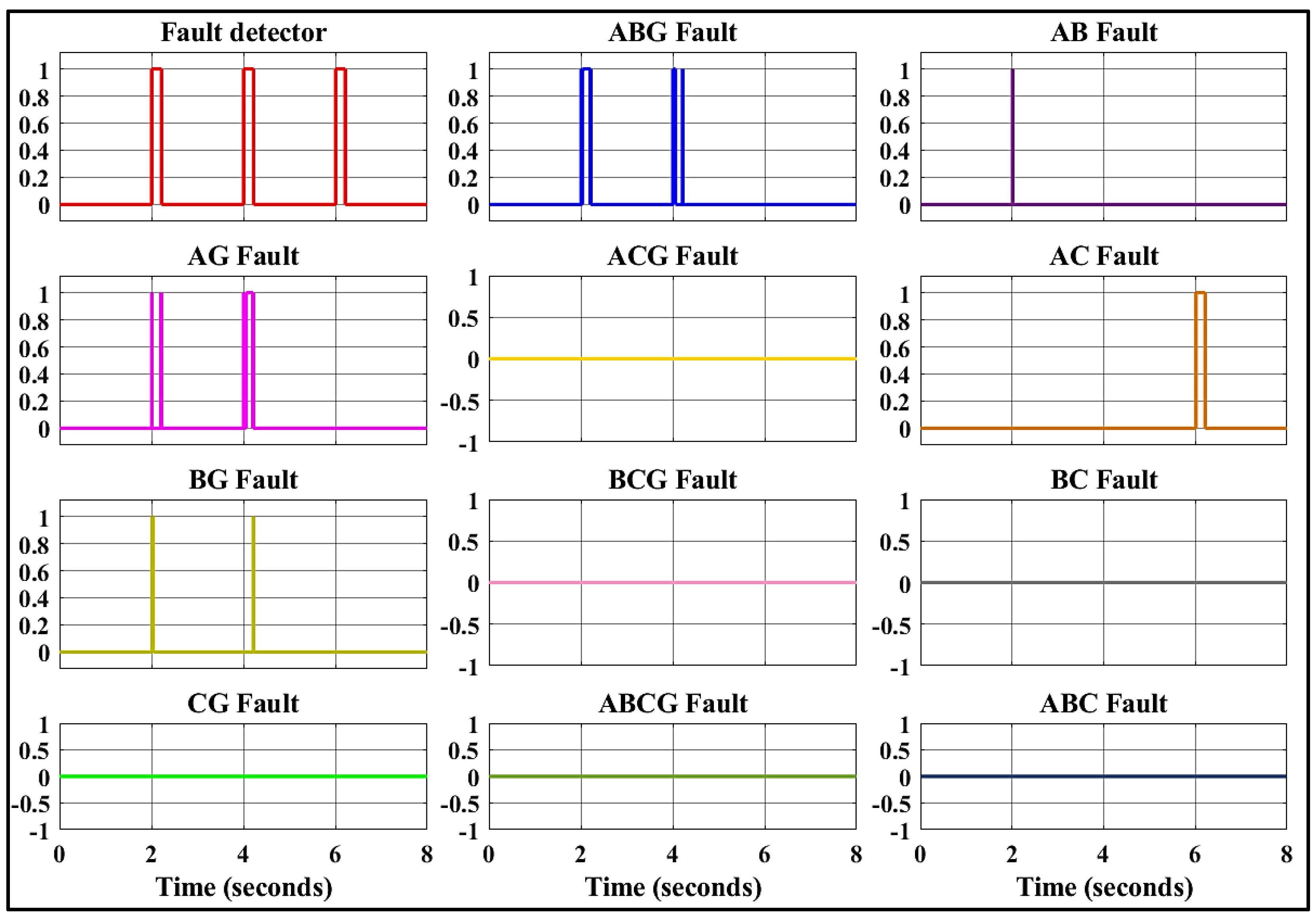
- This paper proposed three ANN-based intelligent fault detection, diagnostic, and location schemes for the adopted AC/DC MGs. The proposed system allows for the rapid online detection, classification, and localization of faults on the AC bus, resulting in a more reliable MG. A proposed fault detection mechanism is capable of providing precise and timely details about the type, phase, and location of faults.
2. System Configuration, Operation, and Modeling
2.1. System Configuration
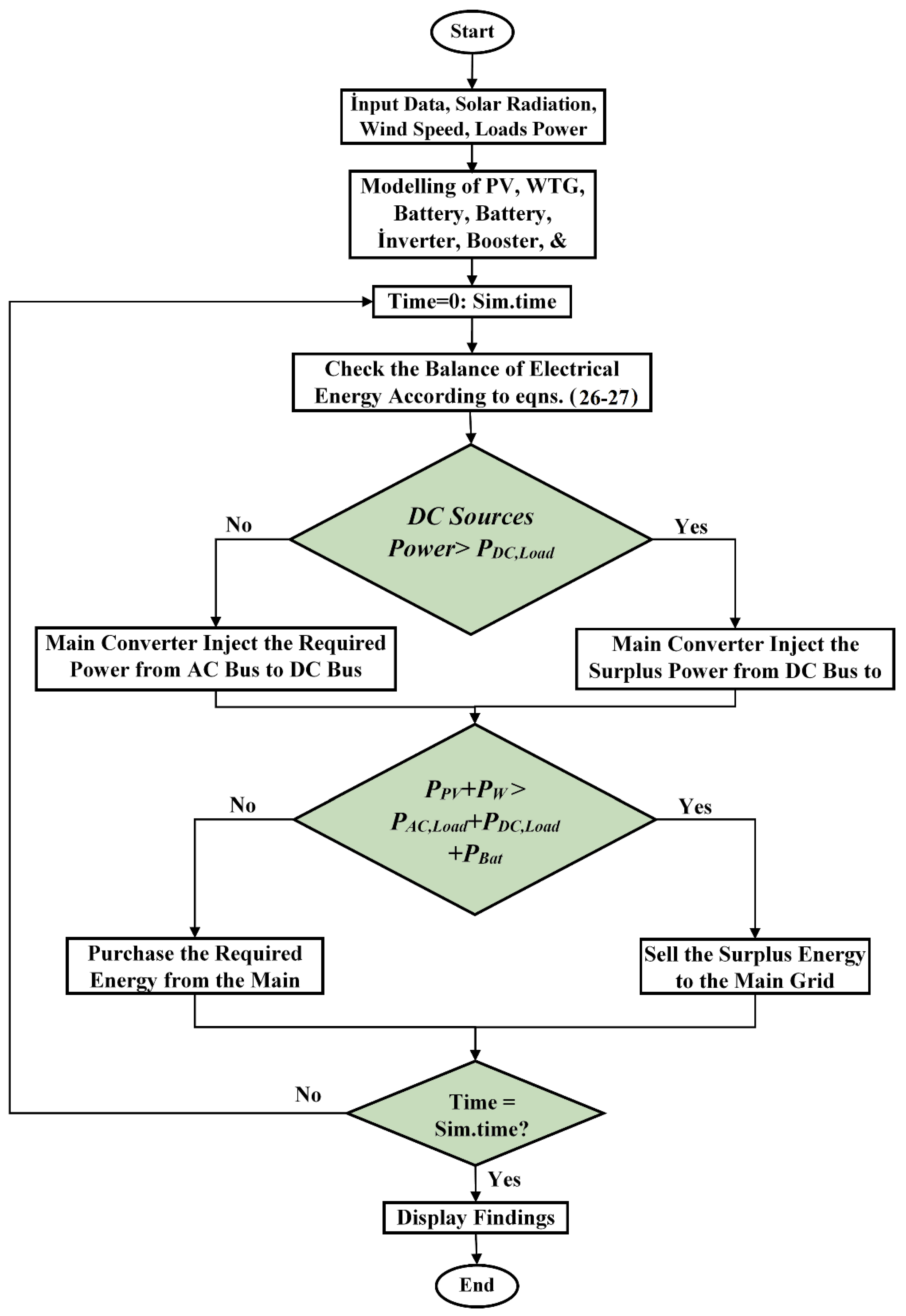
2.2. System Operation
3. System-Generation Resources Modeling
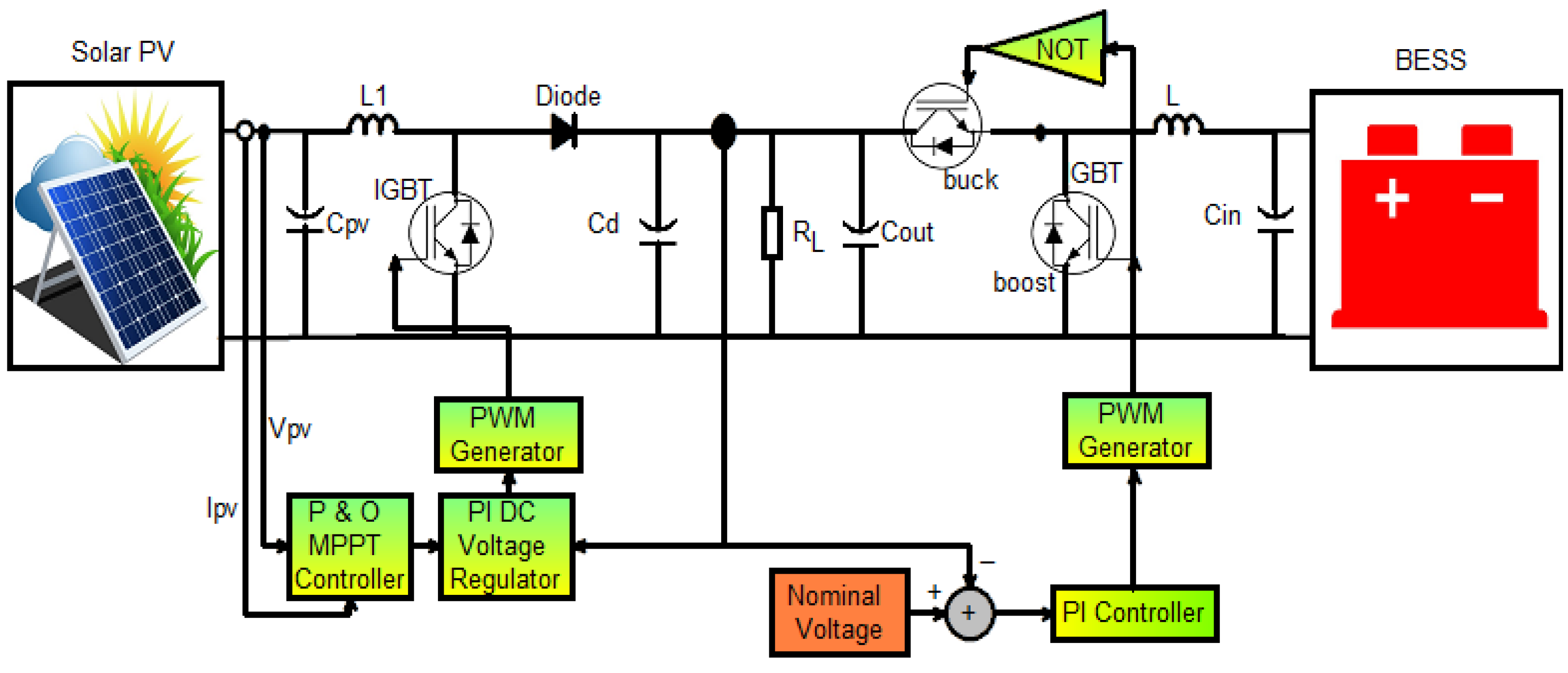
3.1. Solar Photovoltaic
3.2. Wind Turbine Generator (WTG)
3.3. Battery Energy Storage System (BESS)
3.4. Boost Converter
3.5. Buck-Boost Converter
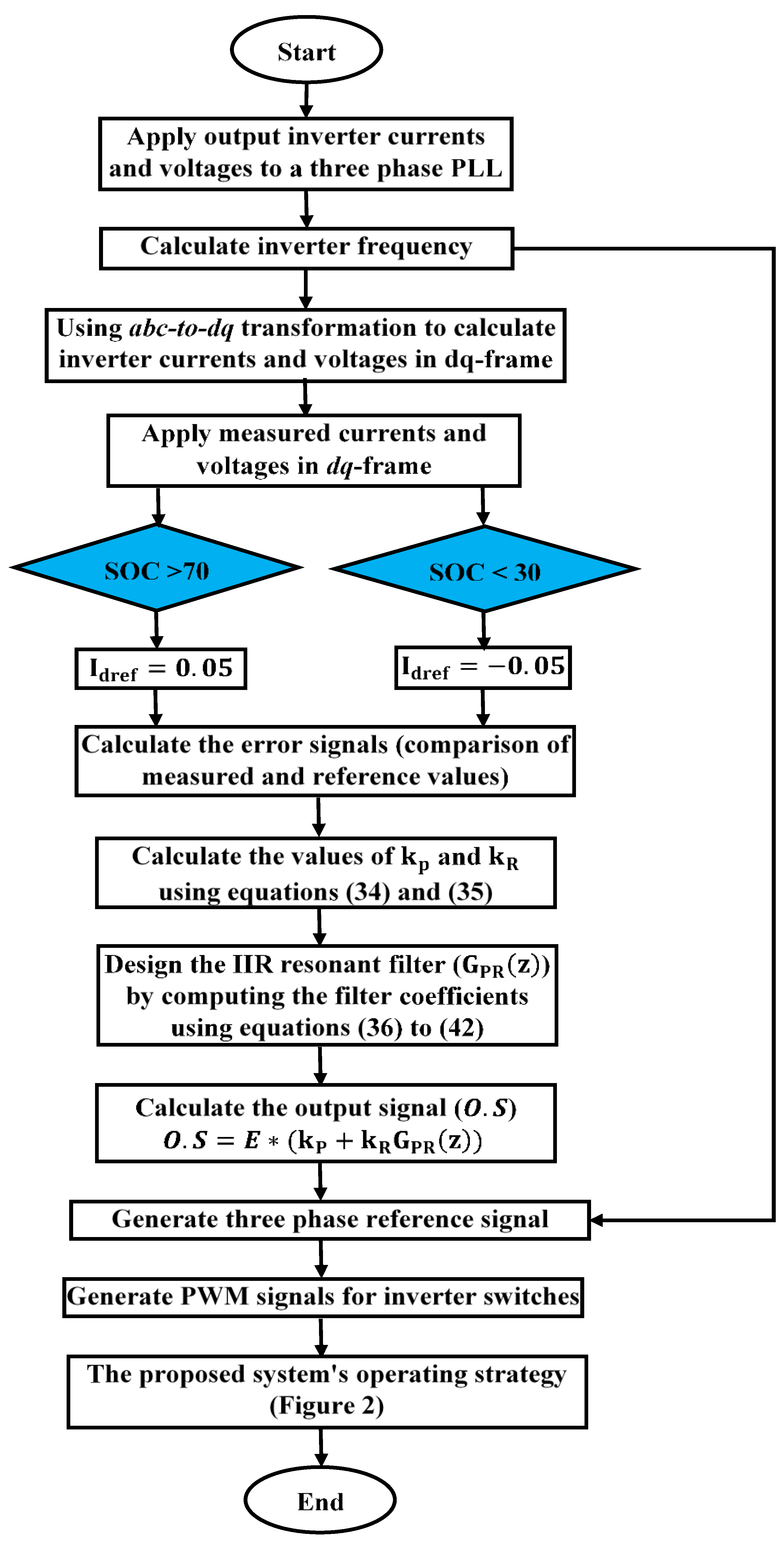
3.6. DC/AC Inverter
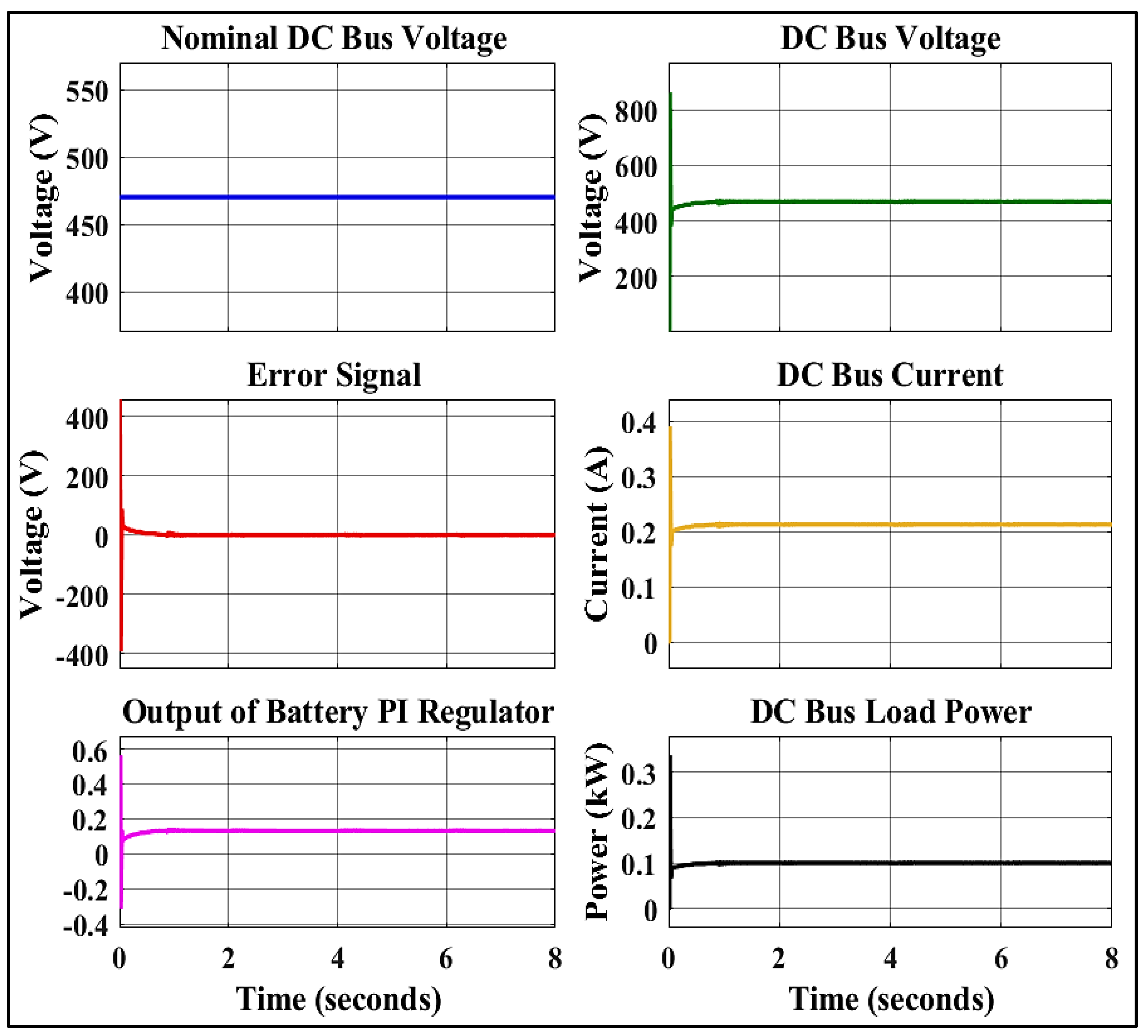
4. The Converter Coordination Control
5. Methodology of the ANNs
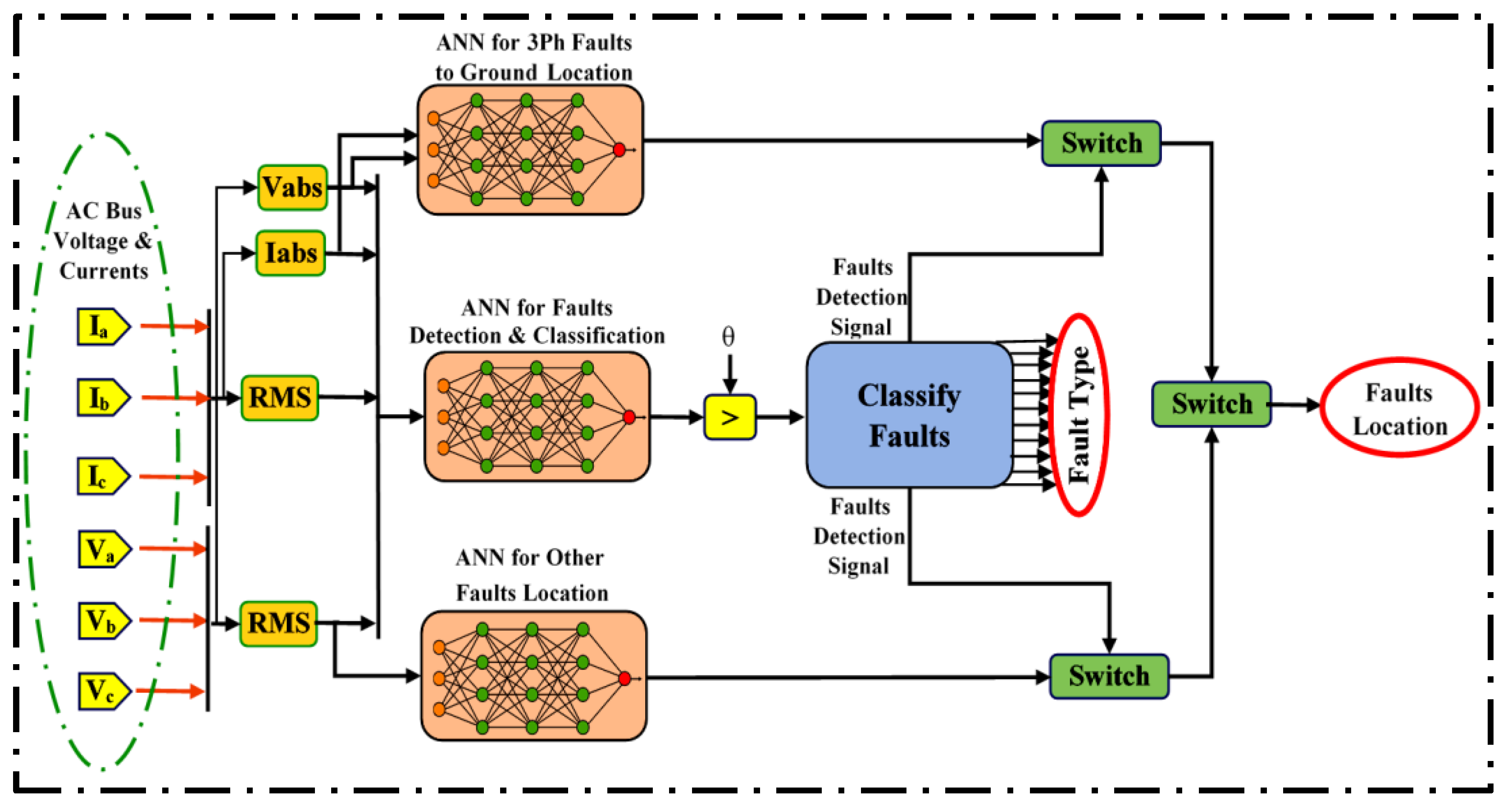
6. ANN-Based Fault Detection, Diagnostic, and Location
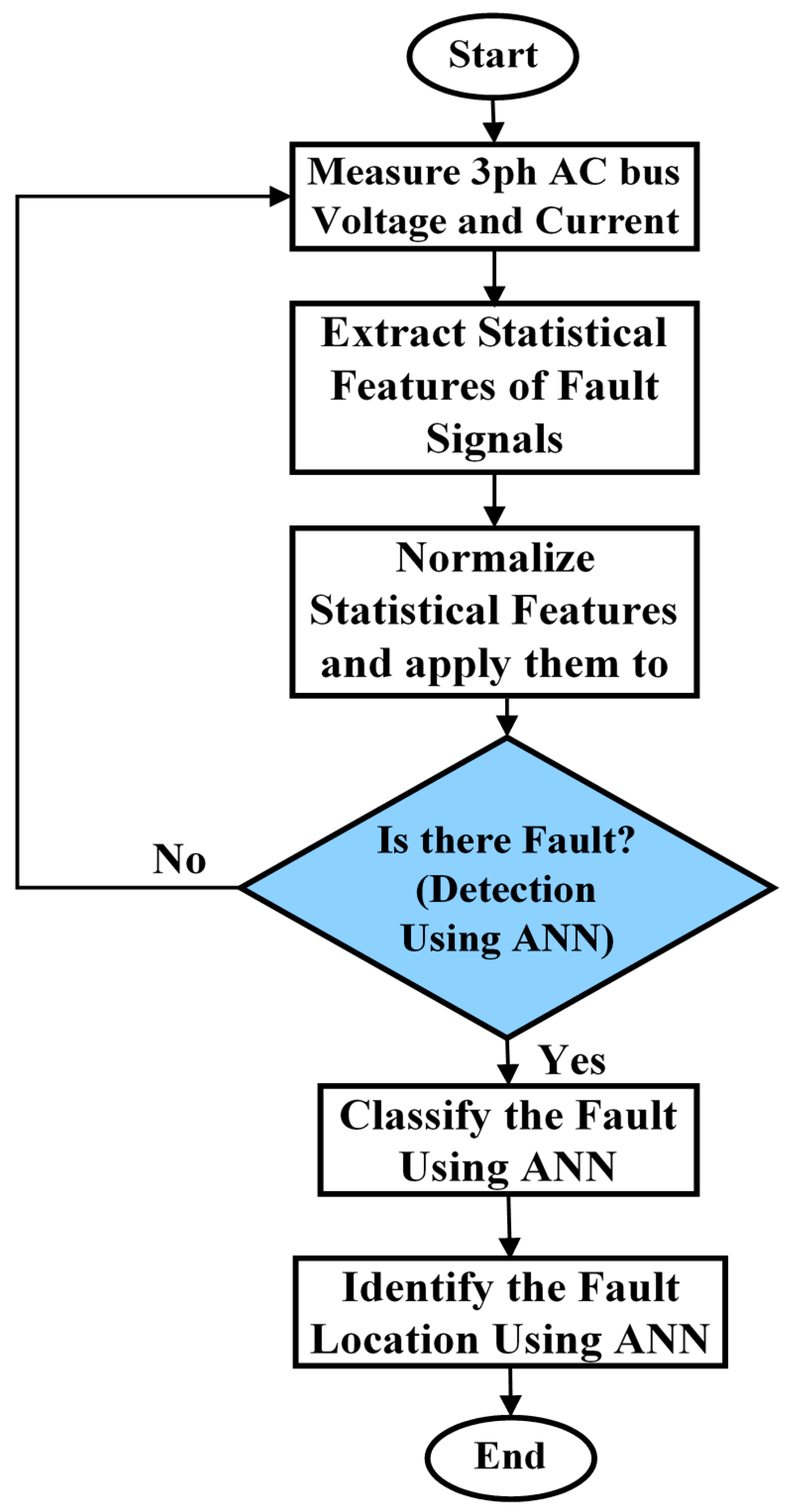
7. The Proposed ANN Process
- Three-phase current and voltage measurements on the AC side: One cycle of postfault current and voltage signals is taken for each phase at the line’s sending end of the MG.
- Extraction of statistical features: Statistical measures are applied to each voltage and current signal to extract statistical features, such as energy and root mean square values.
- The preceding two steps are repeated for various fault locations, fault types, and fault resistance values. Sufficient data must be generated in order for machine learning to be successful.
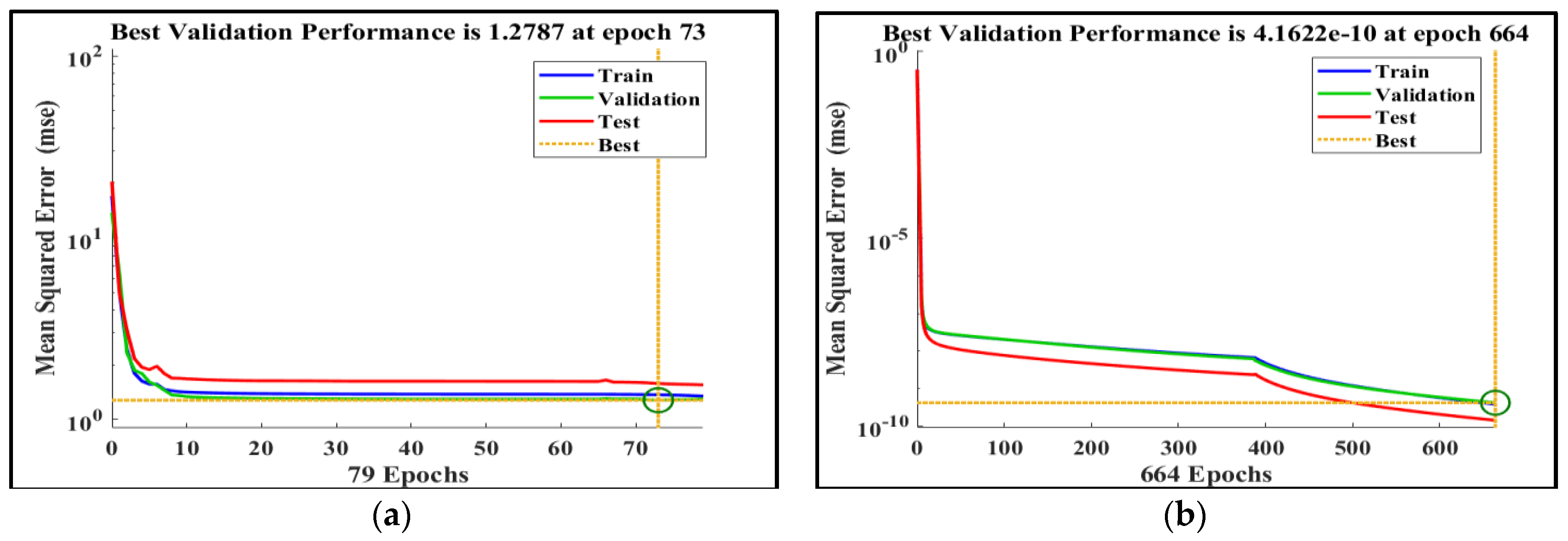
- Machine learning: The data generated is then used to train artificial neural networks for fault detection, classification, and localization purposes. The MLP network based on LM trained method is used for both detection and classification while the other two MLPs are used separately for fault location.
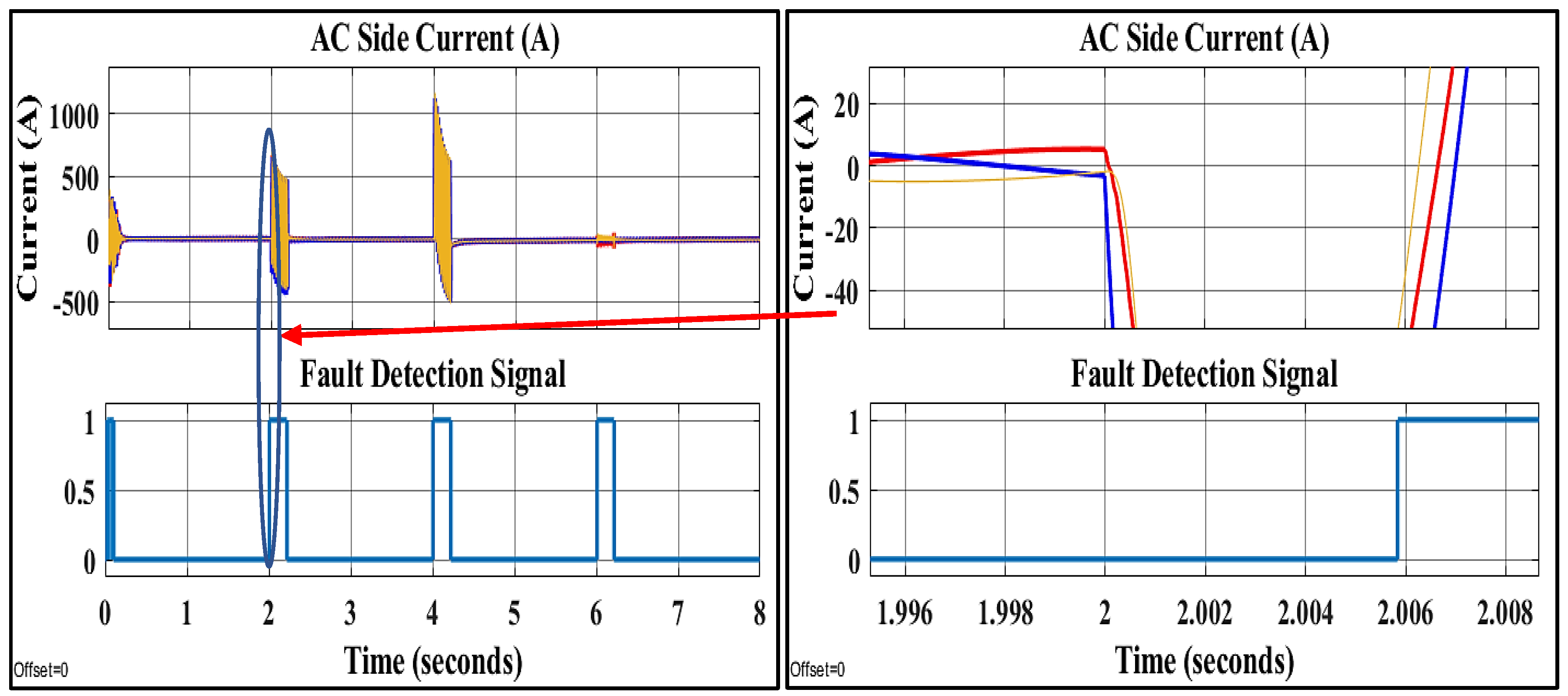
- Fault detection and identification: Once the machine learning algorithm has been adequately trained, it will be able to determine whether or not there is a fault.
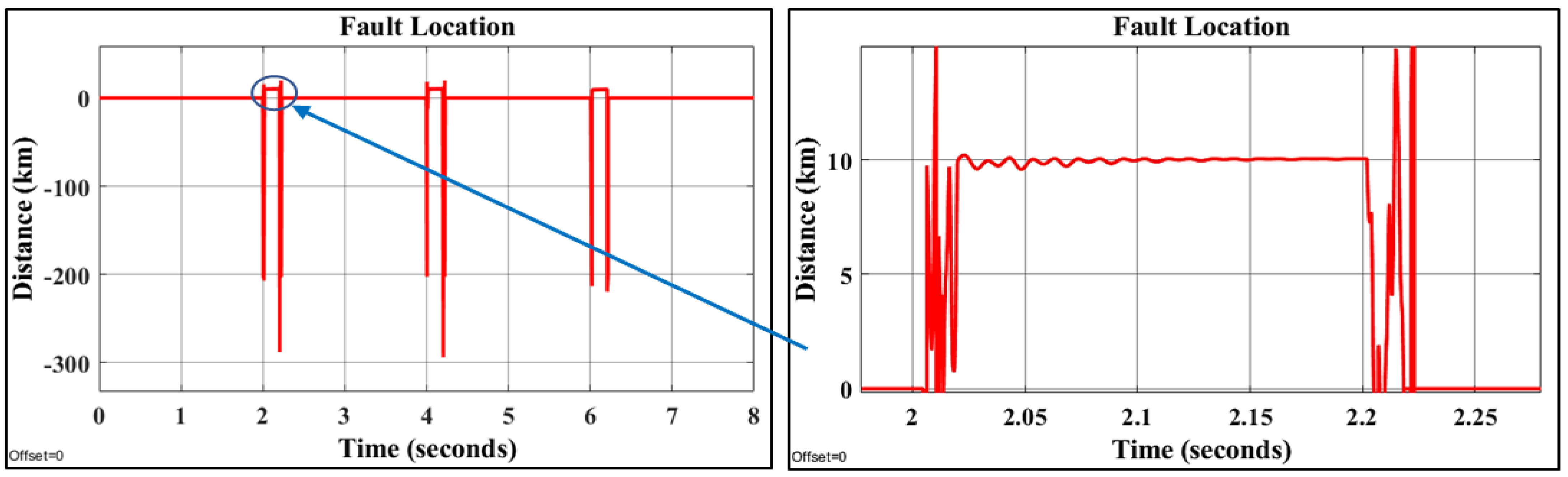
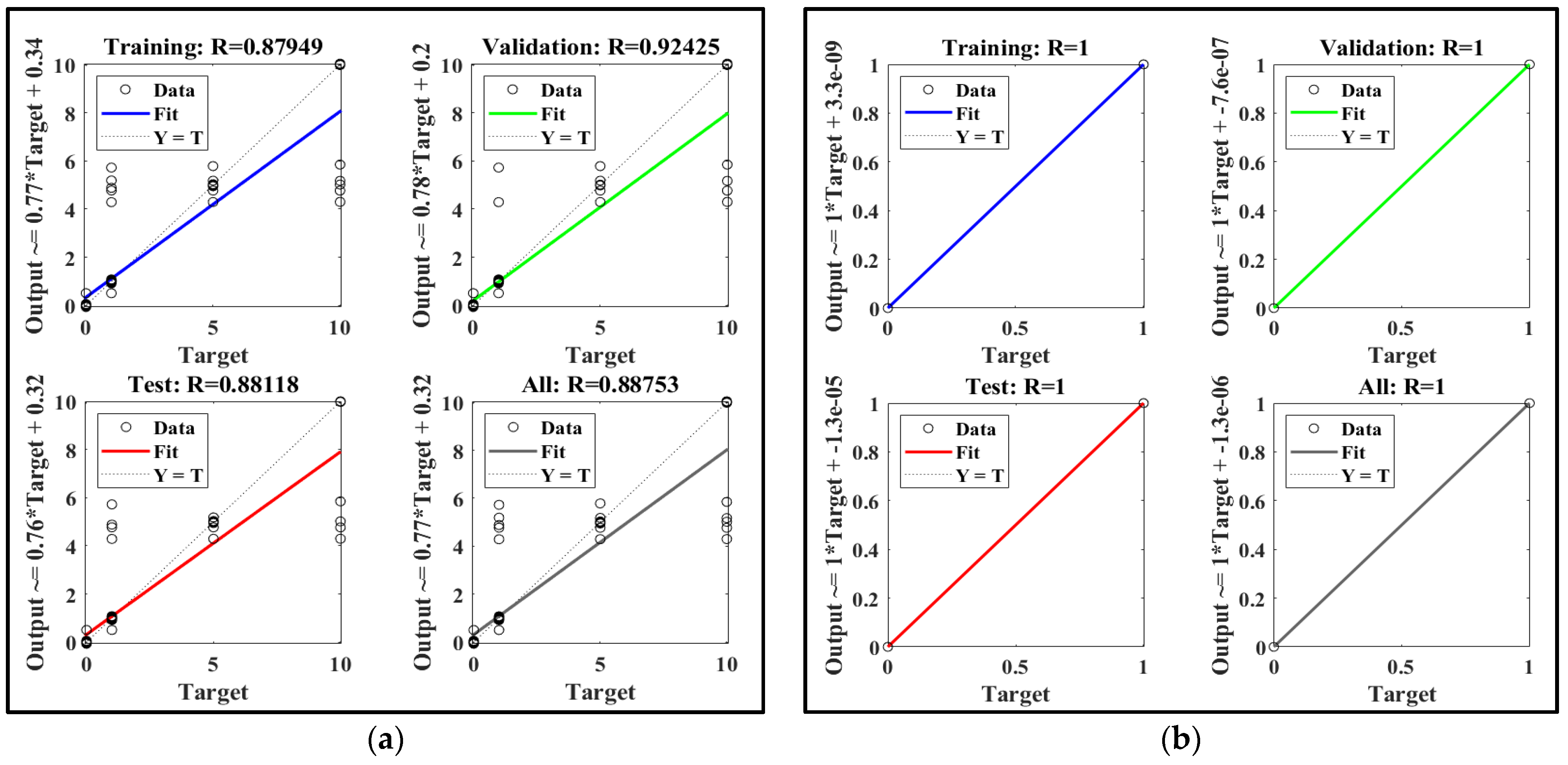
- Fault location: Once a fault has been detected and classified, its location is determined. The location is specified in terms of distance, which is determined by regression-based machine learning, whereas the type of fault is determined by classification-based machine learning.
8. Simulation Results
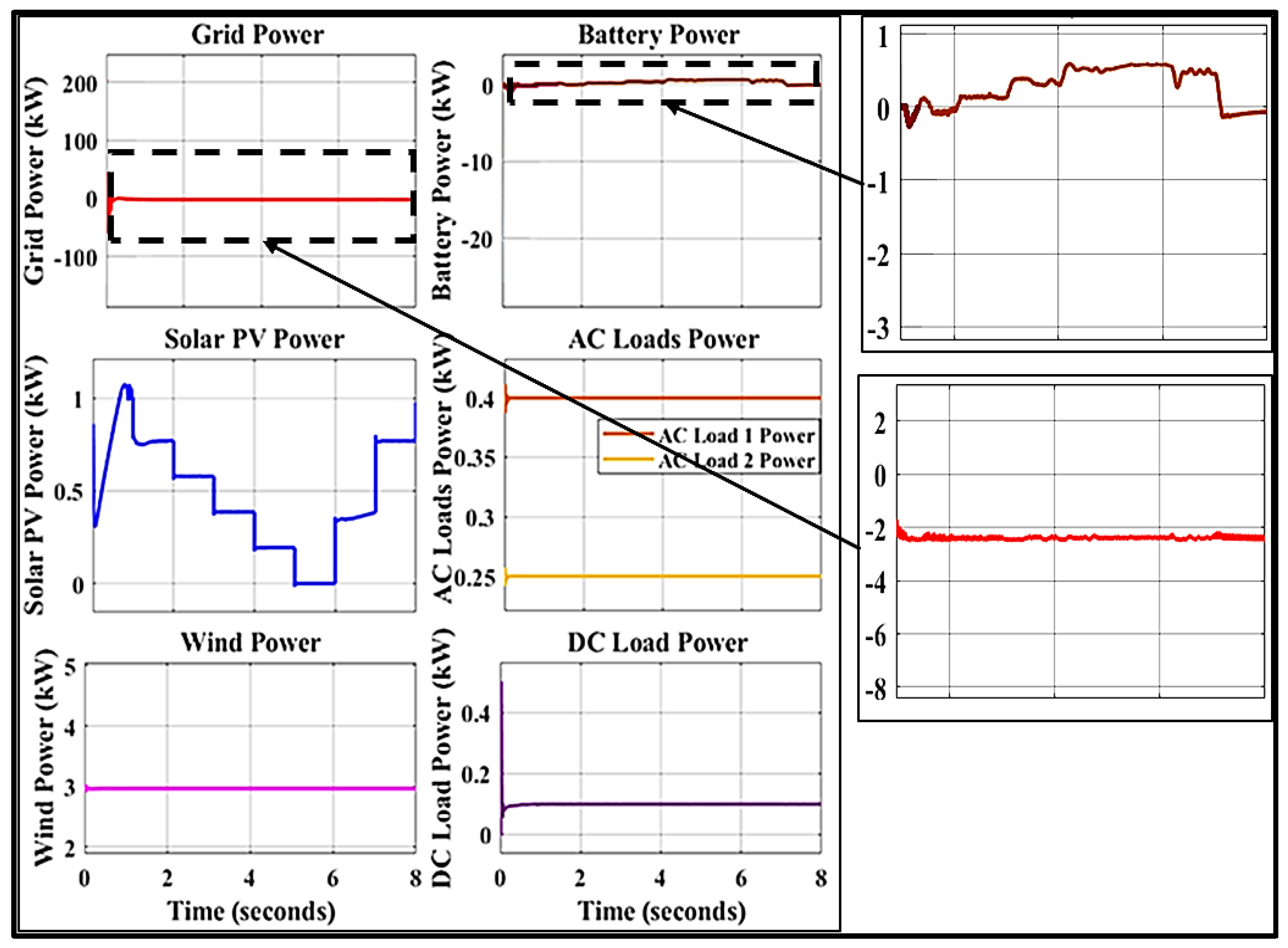
8.1. The First Scenario: Variations in Solar Irradiation
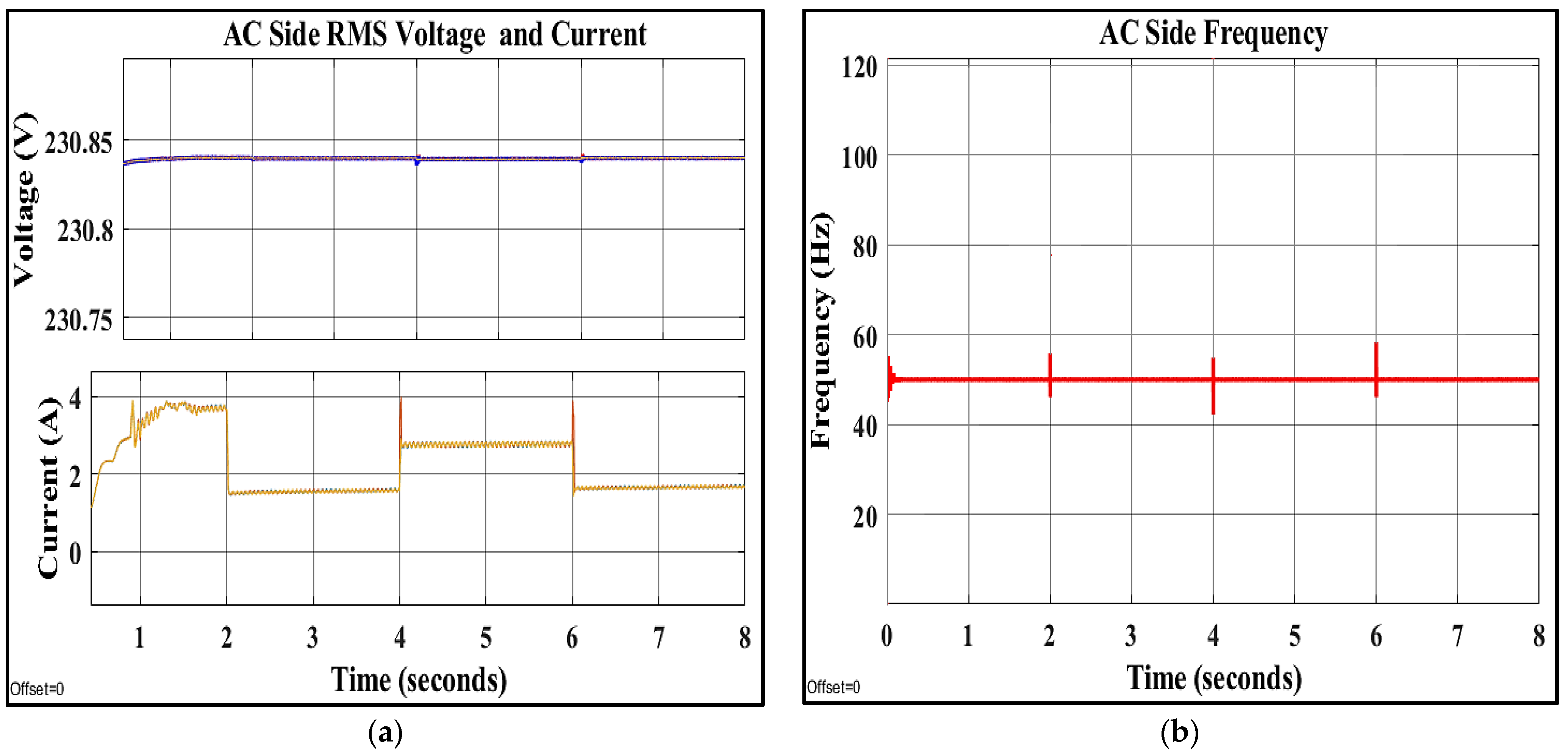
8.2. The Second Scenario: Variations in Load Demand
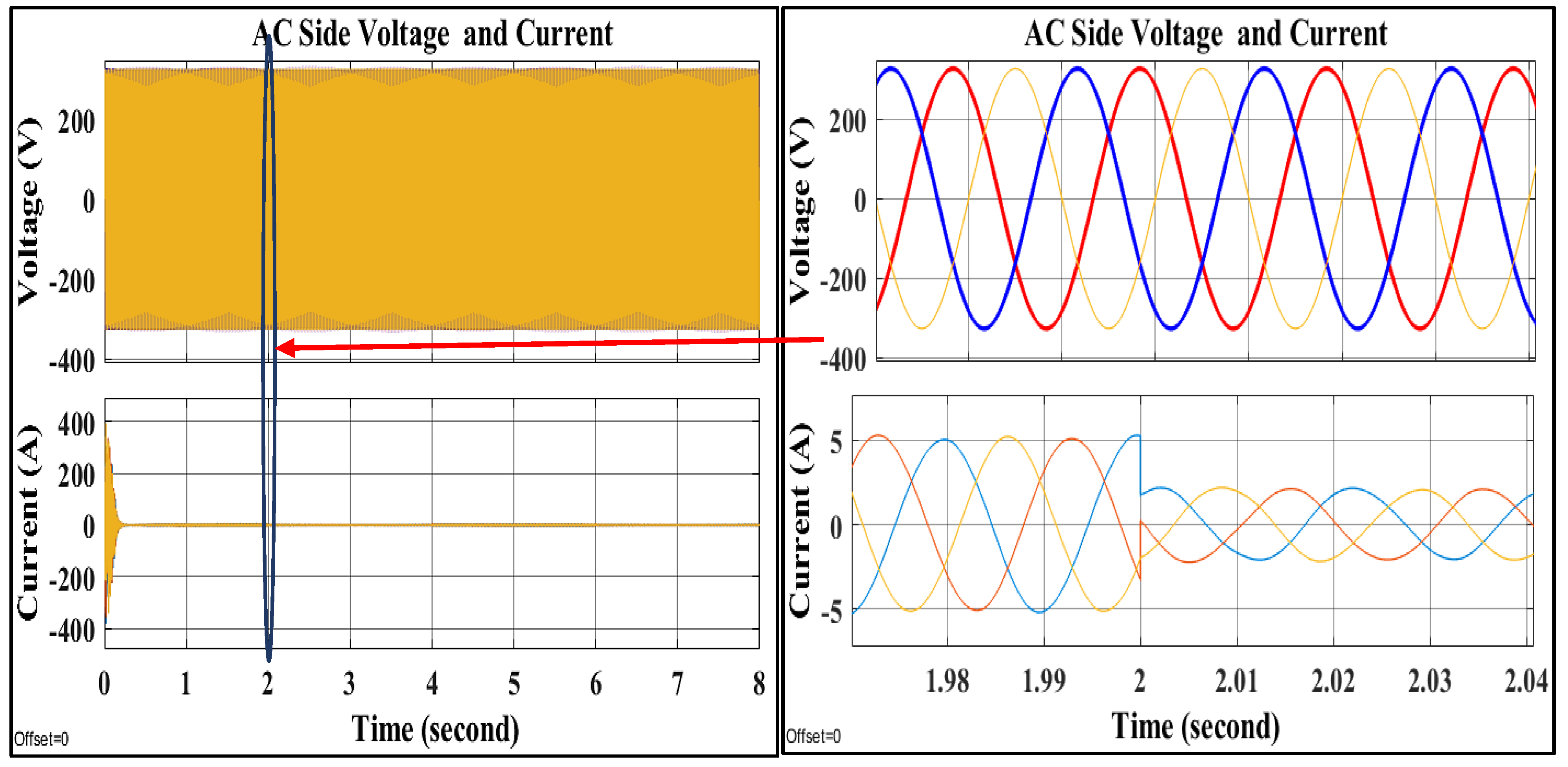
8.3. The Third Scenario: Applying Different Faults
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jasim, A.M.; Jasim, B.H.; Mohseni, S.; Brent, A.C. Consensus-based dispatch optimization of a microgrid considering meta-heuristic-based demand response scheduling and network packet loss characterization. Energy AI 2023, 11, 100212. [Google Scholar] [CrossRef]
- Kroposki, B.; Lasseter, R.; Ise, T.; Morozumi, S.; Papathanassiou, S.; Hatziargyriou, N. Making microgrids work. IEEE Power Energy Mag. 2008, 6, 40–53. [Google Scholar] [CrossRef]
- Behera, C.K.; Thakur, A.K.; Singh, S.P. P-Q Controller of Grid-Connected Microgrid with Smart Inverter Based PV Distributed Energy Resources. In Proceedings of the 2020 International Conference on Electrical and Electronics Engineering (ICE3), Gorakhpur, India, 14–15 February 2020. [Google Scholar]
- Etemadi, A.H.; Davison, E.J.; Iravani, R. A Generalized Decentralized Robust Control of Islanded Microgrids. IEEE Trans. Power Syst. 2014, 29, 3102–3113. [Google Scholar] [CrossRef]
- Levron, Y.; Guerrero, J.M.; Beck, Y. Optimal Power Flow in Microgrids with Energy Storage. IEEE Trans. Power Syst. 2013, 28, 3226–3234. [Google Scholar] [CrossRef] [Green Version]
- Corchero, C.; Cruz-Zambrano, M.; Heredia, F.J. Optimal energy management for a residential microgrid including a vehicleto-grid system. IEEE Trans. Smart Grid 2014, 5, 2163–2172. [Google Scholar]
- Paudyal, S.; Canizares, C.A.; Bhattacharya, K. Optimal Operation of Industrial Energy Hubs in Smart Grids. IEEE Trans. Smart Grid 2015, 6, 684–694. [Google Scholar] [CrossRef]
- Pedrasa, M.A.A.; Spooner, T.D.; MacGill, I.F. Coordinated Scheduling of Residential Distributed Energy Resources to Optimize Smart Home Energy Services. IEEE Trans. Smart Grid 2010, 1, 134–143. [Google Scholar] [CrossRef]
- Kerekes, T.; Teodorescu, R.; Rodriguez, P.; Vazquez, G.; Aldabas, E. A New High-Efficiency Single-Phase Transformerless PV Inverter Topology. IEEE Trans. Ind. Electron. 2011, 58, 184–191. [Google Scholar] [CrossRef] [Green Version]
- Jasim, A.M.; Jasim, B.H.; Bureš, V. A novel grid-connected microgrid energy management system with optimal sizing using hybrid grey wolf and cuckoo search optimization algorithm. Front. Energy Res. 2022, 10, 960141. [Google Scholar] [CrossRef]
- Jena, S.; Babu, C.; Mishra, G.; Naik, A. Reactive power compensation in inverter-interfaced distributed generation. In Proceedings of the 2011 International Conference on Energy, Automation, and Signal (ICEAS), Bhubaneswar, India, 28–30 December 2011; pp. 1–6. [Google Scholar]
- Hornik, T.; Zhong, Q.-C. A Current-Control Strategy for Voltage-Source Inverters in Microgrids Based on H∞ and Repetitive Control. IEEE Trans. Power Electron. 2011, 26, 943–952. [Google Scholar] [CrossRef]
- Jeong, H.-G.; Kim, G.-S.; Lee, K.-B. Second-Order Harmonic Reduction Technique for Photovoltaic Power Conditioning Systems Using a Proportional-Resonant Controller. Energies 2013, 6, 79–96. [Google Scholar] [CrossRef]
- Jasim, A.M.; Jasim, B.H.; Neagu, B.-C. A New Decentralized PQ Control for Parallel Inverters in Grid-Tied Microgrids Propelled by SMC-Based Buck–Boost Converters. Electronics 2022, 11, 3917. [Google Scholar] [CrossRef]
- Zakzouk, N.E.; Abdelsalam, A.K.; Helal, A.A.; Williams, B.W. High Performance Single-Phase Single-Stage Grid-Tied PV Current Source Inverter Using Cascaded Harmonic Compensators. Energies 2020, 13, 380. [Google Scholar] [CrossRef] [Green Version]
- Xie, B.; Guo, K.; Mao, M.; Zhou, L.; Liu, T.; Zhang, Q.; Hao, G. Analysis and Improved Design of Phase Compensated Proportional Resonant Controllers for Grid-Connected Inverters in Weak Grid. IEEE Trans. Energy Convers. 2020, 35, 1453–1464. [Google Scholar] [CrossRef]
- James, J.Q.; Hou, Y.; Lam, A.Y.; Li, V.O. Intelligent Fault Detection Scheme for Microgrids with Wavelet-Based Deep Neural Networks. IEEE Trans. Smart Grid 2017, 10, 1694–1703. [Google Scholar]
- Zhang, F.; Mu, L. A Fault Detection Method of Microgrids with Grid-Connected Inverter Interfaced Distributed Generators Based on the PQ Control Strategy. IEEE Trans. Smart Grid 2018, 10, 4816–4826. [Google Scholar] [CrossRef]
- Jena, P.; Pradhan, A.K. Directional relaying during single-pole tripping using phase change in negative-sequence current. IEEE Trans. Power Deliv. 2013, 28, 1548–1557. [Google Scholar] [CrossRef]
- Liu, K.; Li, Y. Study on solutions for active distribution grid protection. Proc. CSEE 2014, 34, 2584–2590. [Google Scholar]
- Borghetti, A.; Bosetti, M.; Nucci, C.A.; Paolone, M.; Abur, A. Integrated Use of Time-Frequency Wavelet Decompositions for Fault Location in Distribution Networks: Theory and Experimental Validation. IEEE Trans. Power Deliv. 2010, 25, 3139–3146. [Google Scholar] [CrossRef]
- He, Z.; Zhang, J.; Li, W.-H.; Lin, X. Improved Fault-Location System for Railway Distribution System Using Superimposed Signal. IEEE Trans. Power Deliv. 2010, 25, 1899–1911. [Google Scholar] [CrossRef]
- Jafarian, P.; Sanaye-Pasand, M. A Traveling-Wave-Based Protection Technique Using Wavelet/PCA Analysis. IEEE Trans. Power Deliv. 2010, 25, 588–599. [Google Scholar] [CrossRef]
- Lin, Y.-H.; Liu, C.-W.; Yu, C.-S. A new fault locator for threeterminal transmission lines using two-terminal synchronized voltage and current phasors. IEEE Trans. Power Deliv. 2002, 17, 452–459. [Google Scholar]
- Al Hassan, H.A.; Reiman, A.; Reed, G.F.; Mao, Z.H.; Grainger, B.M. Model based fault detection of inverter based microgrids and a mathematical framework to analyse and avoid nuisance tripping and blinding scenarios. Energies 2018, 11, 2152. [Google Scholar] [CrossRef] [Green Version]
- Hare, J.; Shi, X.; Gupta, S.; Bazzi, A. Fault diagnostics in smart micro-grids: A survey. Renew. Sustain. Energy Rev. 2016, 60, 1114–1124. [Google Scholar] [CrossRef]
- Fahim, S.R.; Sarker, Y.; Islam, O.K.; Sarker, S.K.; Ishraque, M.F.; Das, S.K. An Intelligent Approach of Fault Classification and Localization of a Power Transmission Line. In Proceedings of the 2019 IEEE International Conference on Power, Electrical, and Electronics and Industrial Applications (PEEIACON), Dhaka, Bangladesh,, 29 November–1 December 2019; pp. 53–56. [Google Scholar]
- Fahim, S.R.; Sarker, Y.; Sarker, S.K.; Sheikh, M.R.I.; Das, S.K. Self attention convolutional neural network with time series imaging based feature extraction for transmission line fault detection and classification. Electr. Power Syst. Res. 2020, 187, 106437. [Google Scholar] [CrossRef]
- Al-Nasseri, H.; Redfern, M.; Li, F. A voltage based protection for micro-grids containing power electronic converters. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; p. 7. [Google Scholar]
- Rengaraj, R.; Venkatakrishnan, G.R.; Shalini, S.; Subitsha, R.; Suganthi, S.; Carolyn, S.S. Identification and classification of faults in underground cables—A review. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1166, 012018. [Google Scholar] [CrossRef]
- Shi, Q.; Kanoun, O. Wire Fault Diagnosis in the Frequency Domain by Impedance Spectroscopy. IEEE Trans. Instrum. Meas. 2015, 64, 2179–2187. [Google Scholar] [CrossRef]
- Naval, K.; Prabhat, K. Distribution System Fault Detection and Classification using Wavelet Transform and Artificial Neural Networks. In Proceedings of the 11th IOE Graduate Conference Peer Reviewed 2022, Pokhara, Nepal, 10–11 March 2022; Venue: Paschimanchal Campus, IOE, TU. Volume 11, pp. 10–11. [Google Scholar]
- Chen, K.; Huang, C.; He, J. Fault detection, classification and location for transmission lines and distribution systems: A review on the methods. High Volt. 2016, 1, 25–33. [Google Scholar] [CrossRef]
- Bunnoon, P. Fault Detection Approaches to Power System: State-of-the-Art Article Reviews for Searching a New Approach in the Future. Int. J. Electr. Comput. Eng. (IJECE) 2013, 3, 553–560. [Google Scholar] [CrossRef]
- Musa, M.H.; He, Z.; Fu, L.; Deng, Y. A correlation coefficientbased algorithm for fault detection and classification in a power transmission line. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 1394–1403. [Google Scholar] [CrossRef]
- Ponukumati, B.K.; Sinha, P.; Maharana, M.K.; Jenab, C.; Kumar, A.P.; Akkenaguntla, K. Pattern Recognition Technique Based Fault Detection in Multi-Microgrid. In Proceedings of the 2nd International Conference on Applied Electromagnetics, Signal Processing, & Communication, Bhubaneswar, India, 26–28 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- De La Ree, J.; Centeno, V.; Thorp, J.S.; Phadke, A.G. Synchronized Phasor Measurement Applications in Power Systems. IEEE Trans. Smart Grid 2010, 1, 20–27. [Google Scholar] [CrossRef]
- Fahim, S.R.; Datta, D.; Sheikh, M.R.I.; Dey, S.; Sarker, Y.; Sarker, S.K.; Badal, F.R.; Das, S.K. A Visual Analytic in Deep Learning Approach to Eye Movement for Human-Machine Interaction Based on Inertia Measurement. IEEE Access 2020, 8, 45924–45937. [Google Scholar] [CrossRef]
- Sarker, Y.; Fahim, S.R.; Sarker, S.K.; Badal, F.R.; Das, S.K.; Mondal, M.N.I. A Multidimensional Pixel-wise Convolutional Neural Network for Hyperspectral Image Classification. In Proceedings of the 2019 IEEE International Conference on Robotics, Automation, Artificial-intelligence and Internet-of-Things (RAAICON), Dhaka, Bangladesh, 29 November–1 December 2019; pp. 104–107. [Google Scholar]
- Fahim, S.R.; Sarker, Y.; Rashiduzzaman, M.; Islam, O.K.; Sarker, S.K.; Das, S.K. A Human-Computer Interaction System Utilizing Inertial Measurement Unit and Convolutional Neural Network. In Proceedings of the 2019 5th International Conference on Advances in Electrical Engineering (ICAEE), Dhaka, Bangladesh, 26–28 September 2019; pp. 880–885. [Google Scholar]
- Casagrande, E.; Woon, W.L.; Zeineldin, H.H.; Svetinovic, D. A Differential Sequence Component Protection Scheme for Microgrids with Inverter-Based Distributed Generators. IEEE Trans. Smart Grid 2014, 5, 29–37. [Google Scholar] [CrossRef]
- Che, L.; Khodayar, M.E.; Shahidehpour, M. Adaptive Protection System for Microgrids: Protection practices of a functional microgrid system. IEEE Electrif. Mag. 2014, 2, 66–80. [Google Scholar] [CrossRef]
- Jamalaldin, S.; Hakim, S.; Razak, H. Damage Identification Using Experimental Modal Analysis and Adaptive Neuro-Fuzzy Interface System (ANFIS). In Topics in Modal Analysis, Conference Proceedings of the Society for Experimental Mechanics Series 30; Springer: New York, NY, USA, 2012; Volume 5, pp. 399–405. [Google Scholar]
- Zhi, D.; Xu, L. Direct power control of DFIG with constant switching frequency and improved transient performance. IEEE Trans. Energy Conv. 2007, 22, 110–118. [Google Scholar] [CrossRef]
- Tremblay, O.; Dessaint, L.-A.; Dekkiche, A.-I. A Generic Battery Model for the Dynamic Simulation of Hybrid Electric Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 284–289. [Google Scholar]
- Bo, L.; Shahidehpour, M. Short-term scheduling of battery in a grid-connected PV/battery system. IEEE Trans. Power Syst. 2005, 20, 1053–1061. [Google Scholar]
- Daniel, S.; AmmasaiGounden, N. A Novel Hybrid Isolated Generating System Based on PV Fed Inverter-Assisted Wind-Driven Induction Generators. IEEE Trans. Energy Convers. 2004, 19, 416–422. [Google Scholar] [CrossRef]
- Wang, C.; Nehrir, M.H. Power Management of a Stand-Alone Wind/Photovoltaic/Fuel Cell Energy System. IEEE Trans. Energy Convers. 2008, 23, 957–967. [Google Scholar] [CrossRef]
- Lin, J.L.; Chang, C.H. Small-signal modeling and control of ZVT-PWM boost converters. IEEE Trans. Power Electron. 2003, 18, 2–10. [Google Scholar]
- Sozer, Y.; Torrey, D.A. Modeling and Control of Utility Interactive Inverters. IEEE Trans. Power Electron. 2009, 24, 2475–2483. [Google Scholar] [CrossRef]
- Kroutikova, N.; Hernandez-Aramburo, C.; Green, T. State-space model of grid-connected inverters under current control mode. IET Electr. Power Appl. 2007, 1, 329–338. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Anbuky, A.; Pascoe, P. VRLA battery state-of-charge estimation in telecommunication power systems. IEEE Trans. Ind. Electron. 2000, 47, 565–573. [Google Scholar] [CrossRef]
- Kutluay, K.; Cadirci, Y.; Ozkazanc, Y.S.; Cadirci, I. A new online state-of-charge estimation and monitoring system for sealed lead-acid batteries in telecommunication power supplies. IEEE Trans. Ind. Electron. 2005, 52, 1315–1327. [Google Scholar] [CrossRef]
- Cha, H.; Vu, T.K.; Kim, J.E. Design and Control of Proportional-Resonant Controller Based Photovoltaic Power Conditioning System. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, IEEE Xplore, San Jose, CA, USA, 20–24 September 2009. [Google Scholar]
- Shabib, G.; Abd-Elhameed, E.H.; Magdy, G. A New Approach to the Digital Implementation of Analog Controllers for a Power System Control. Int. J. Sci. Eng. Res. 2014, 5, 419–427. [Google Scholar]
- Busarello TD, C.; Pomilio, J.A.; Simoes, M.G. Design Procedure for a Digital Proportional-Resonant Current Controller in a Grid Connected Inverter. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), in IEEE Xplore, Singapore, 10–13 December 2018. [Google Scholar]
- Jasim, A.; Mahmood, J.; Salim, R. Design and Implementation of a Musical Water Fountain Based on Sound Harmonics Using IIR Filters. Int. J. Comput. Digit. Syst. 2020, 9, 319–333. [Google Scholar]
- Arnalte, S.; Burgos, J.C.; Rodríguez-Amenedo, J.L. Direct Torque Control of a Doubly-Fed Induction Generator for Variable Speed Wind Turbines. Electr. Power Compon. Syst. 2002, 30, 199–216. [Google Scholar] [CrossRef]
- Kim, W.S.; Jou, S.T.; Lee, K.B.; Watkins, S. Direct power control of a doubly fed induction generator with a fixed switching frequency. In Proceedings of the 2008 IEEE Industry Applications Society Annual Meeting, Edmonton, AB, Canada, 5–9 October 2008; pp. 1–9. [Google Scholar]
- Koutroulis, E.; Kalaitzakis, K. Design of a maximum power tracking system for wind-energy-conversion applications. IEEE Trans. Ind. Electron. 2006, 53, 486–494. [Google Scholar] [CrossRef]
- Mirzaei, M.; Ab Kadir MZ, A.; Moazami, E.; Hizam, H. Review of fault location methods for distribution power system. Aust. J. Basic Appl. Sci. 2009, 3, 2670–2676. [Google Scholar]
- Jasim, A.M.; Jasim, B.H.; Bureš, V.; Mikulecký, P. A New Decentralized Robust Secondary Control for Smart Is-907 landed Microgrids. Sensors 2022, 22, 8709. [Google Scholar] [CrossRef]
- Aggarwal, L.; Aggarwal, K.; Urbanic, R.J. Use of artificial neural networks for the development of an inverse kinematic solution and visual identification of singularity zone(s). Procedia CIRP 2014, 17, 812–817. [Google Scholar] [CrossRef]
- Samarsinghe, S. Neural Networks for Applied Sciences and Engineering; Auerbach Publications: Boca Raton, FL, USA, 2006. [Google Scholar]
- Souza, C.D. Neural Network Learning by the Levenberg-Marquardt Algorithm with Bayesian Regularization (Part 1). Available online: https://www.codeproject.com/Articles/55691/Neural-Network-Learningby-the-Levenberg-Marquardt (accessed on 6 October 2022).
- Al-Shayea, Q.K. Artificial neural network in medical diagnosis. Int. J. Comput. Sci. 2011, 8, 150–154. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Acronym | Value |
|---|---|---|
| Input booster capacitor | 0.00875 f | |
| Output booster capacitor | 500 μf | |
| Boost inductance | 0.0105 H | |
| Inverter filter resistor | 0.05 Ω | |
| Inverter filter inductance | 10 mH | |
| Inverter filter inductance | 100 μF | |
| AC side voltage | 400 V | |
| DC side voltage | 470 V | |
| Input buck-boost capacitor | 500 μF | |
| Output buck-boost capacitor | 500 μF | |
| Buck-boost inductance | 0.0105 H | |
| Battery nominal voltage | 400 V | |
| Initial state of charge | SOC | 71% |
| 3Ph PI section line length | 10 km | |
| Main grid voltage | 34.5 kV | |
| Main grid power | 154 MW | |
| System frequency | 50 Hz |
| Parameter Name | Acronym | Value |
|---|---|---|
| bandwidth revolves around AC frequency | ||
| AC nominal frequency | ||
| Proportional gain PR current compensator | 0.3 | |
| Integral gain PR current compensator | 77 | |
| Damping coefficient PR current and power compensators | 0.95 | |
| Measured signal gain for DG1 and DG2 | 0.05 | |
| bandwidth revolves around AC frequency | ||
| AC nominal frequency |
| Coefficient | Value |
|---|---|
| 8.682115835420001 × 10−6 | |
| 0 | |
| −8.682115835420001 × 10−6 | |
| 1 | |
| −1.999976025486589 | |
| 0.999976124181453 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jasim, A.M.; Jasim, B.H.; Neagu, B.-C.; Alhasnawi, B.N. Coordination Control of a Hybrid AC/DC Smart Microgrid with Online Fault Detection, Diagnostics, and Localization Using Artificial Neural Networks. Electronics 2023, 12, 187. https://doi.org/10.3390/electronics12010187
Jasim AM, Jasim BH, Neagu B-C, Alhasnawi BN. Coordination Control of a Hybrid AC/DC Smart Microgrid with Online Fault Detection, Diagnostics, and Localization Using Artificial Neural Networks. Electronics. 2023; 12(1):187. https://doi.org/10.3390/electronics12010187
Chicago/Turabian StyleJasim, Ali M., Basil H. Jasim, Bogdan-Constantin Neagu, and Bilal Naji Alhasnawi. 2023. "Coordination Control of a Hybrid AC/DC Smart Microgrid with Online Fault Detection, Diagnostics, and Localization Using Artificial Neural Networks" Electronics 12, no. 1: 187. https://doi.org/10.3390/electronics12010187