
Multi-Scenario Millimeter Wave Channel Measurements and Characteristic Analysis in Smart Warehouse at 28 GHz
 ,
,
Abstract
:1. Introduction
2. MmWave Channel Measurement Campaigns in Smart Warehouse
2.1. Intelligent Forklift Truck Scenario
2.2. Stacking and Shuttle Car Scenario
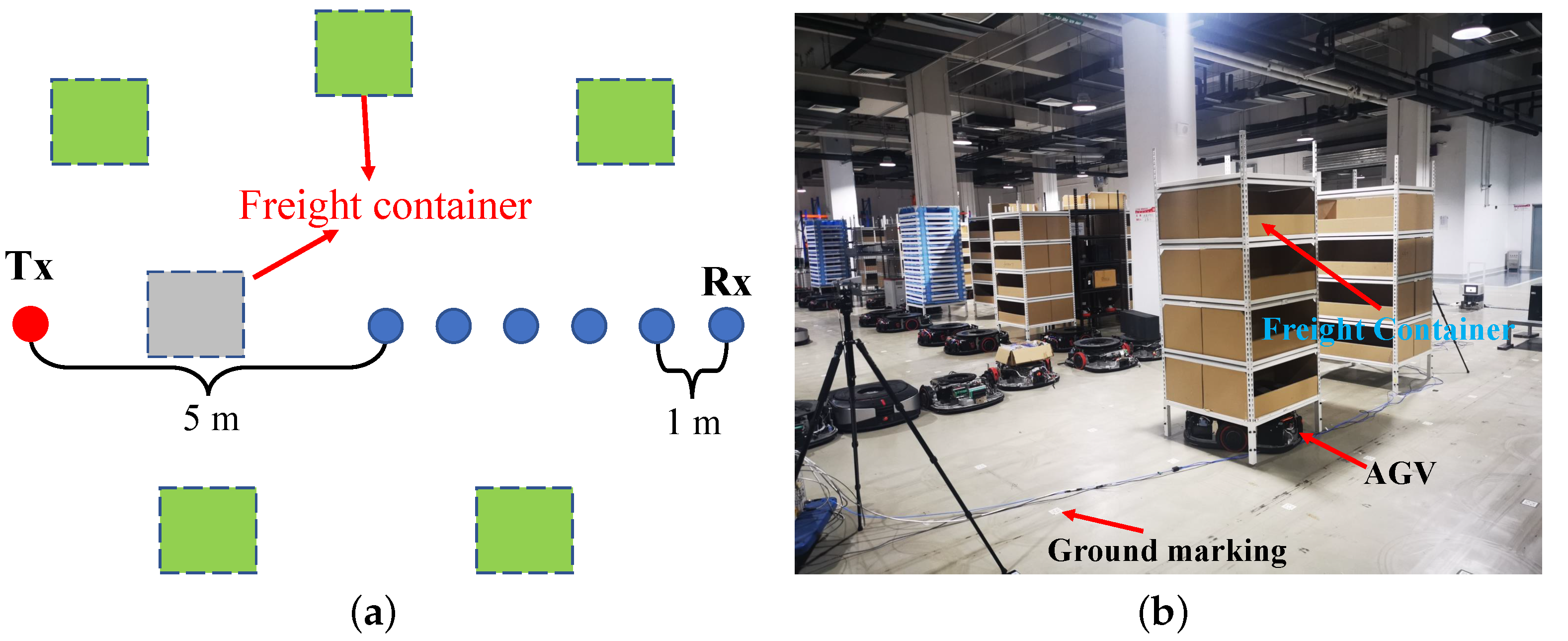
2.3. Automated Guided Vehicle Scenario
3. Channel Characteristics
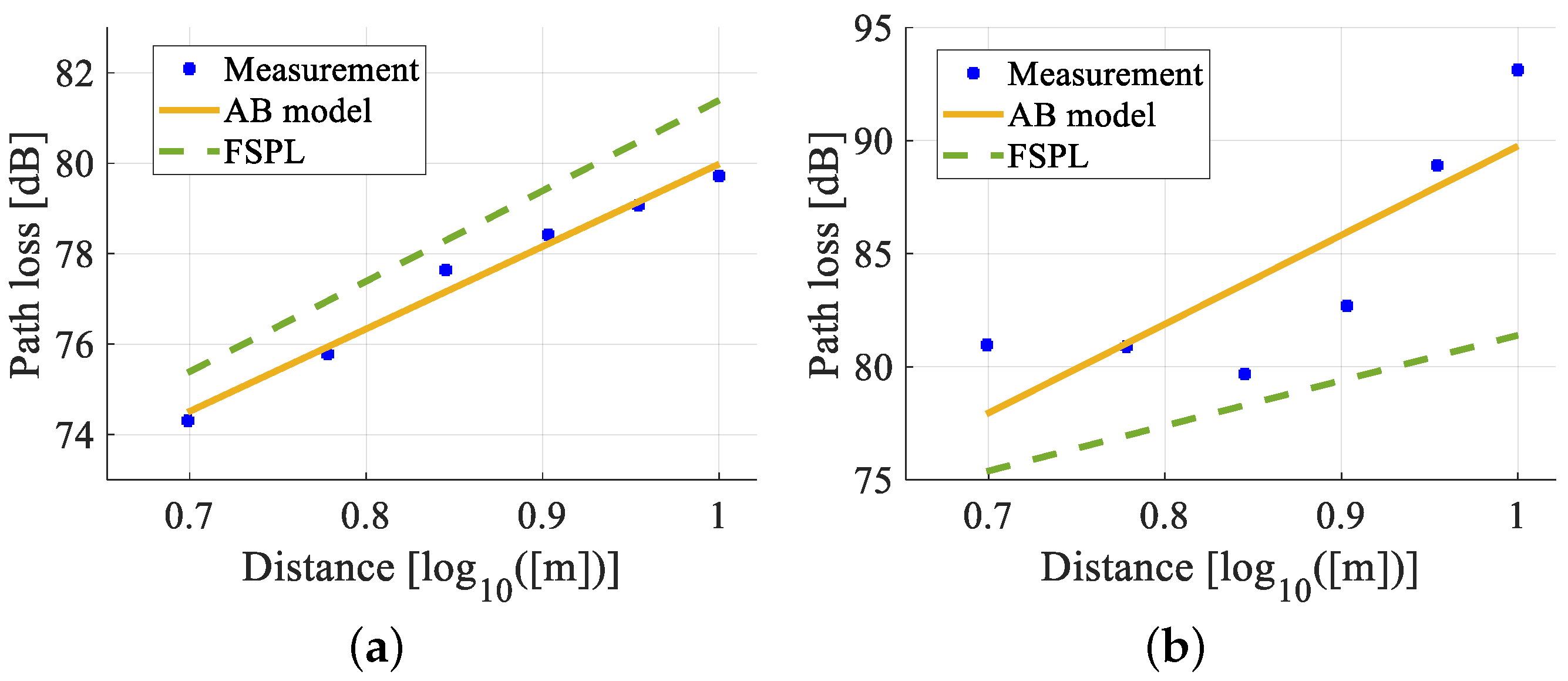
3.1. Path Loss
3.2. RMS Delay Spread
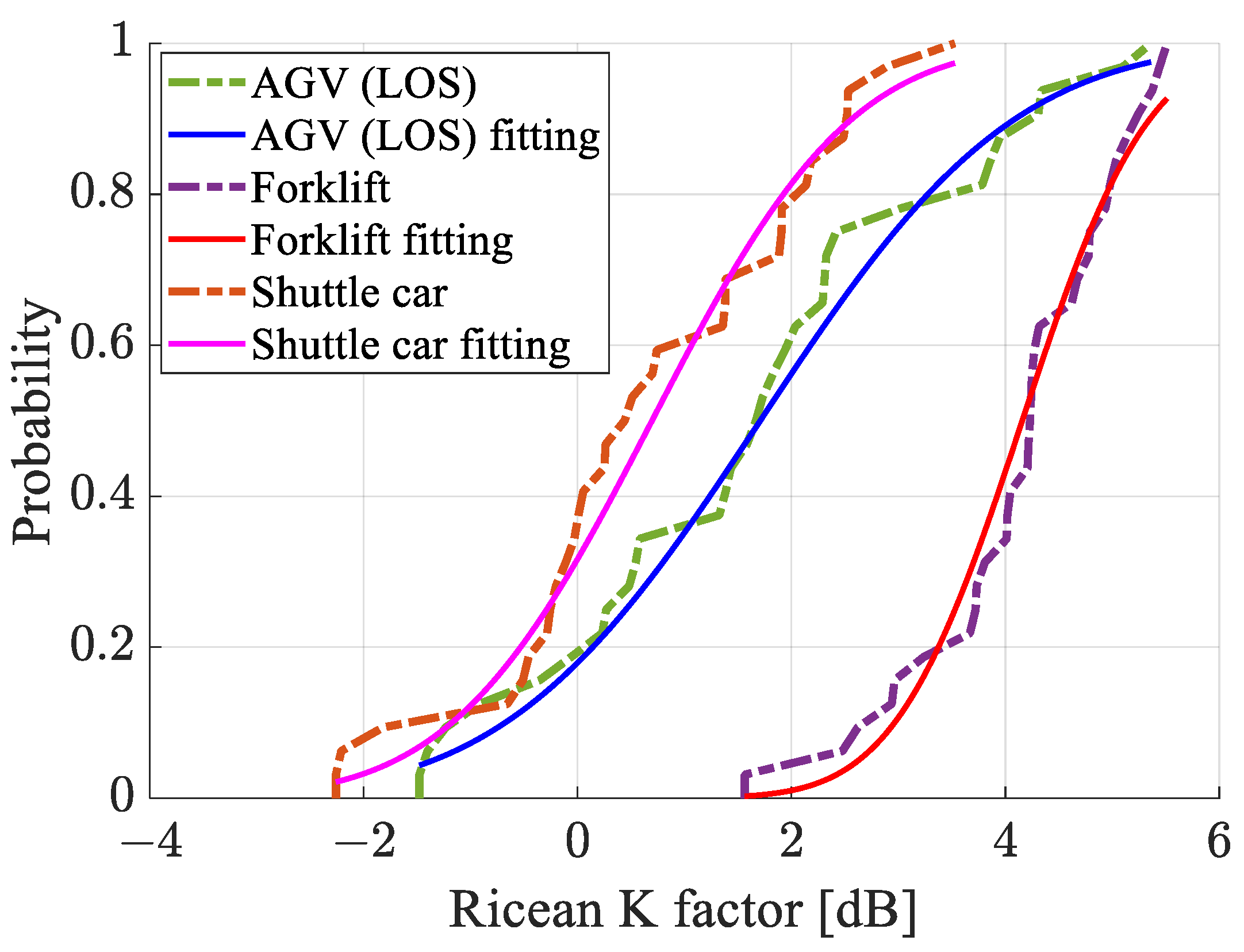
3.3. Rician K Factor
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhen, L.; Li, H. A literature review of smart warehouse operations management. Front. Eng. Manag. 2022, 9, 31–55. [Google Scholar] [CrossRef]
- Kamali, A. Smart warehouse vs. traditional warehouse. CiiT. Int. J. Autom. Auton. Syst. 2019, 11, 9–16. [Google Scholar]
- Lee, Y.; Kim, J.; Lee, H.; Moon, K. IoT-based data transmitting system using a UWB and RFID system in smart warehouse. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 545–547. [Google Scholar] [CrossRef]
- Cogo, E.; Žunić, E.; Beširević, A.; Delalić, S.; Hodžić, K. Position based visualization of real world warehouse data in a smart warehouse management system. In Proceedings of the 2020 19th International Symposium INFOTEH-JAHORINA (INFOTEH), East Sarajevo, Bosnia and Herzegovina, 18–20 March 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, X.; Cao, J.; Yang, Y.; Jiang, S. CPS-based smart warehouse for industry 4.0: A survey of the underlying technologies. Computers 2018, 7, 13. [Google Scholar] [CrossRef] [Green Version]
- Žunić, E.; Delalić, S.; Hodžić, K.; Beširević, A.; Hindija, H. Smart warehouse management system concept with implementation. In Proceedings of the 2018 14th Symposium on Neural Networks and Applications (NEUREL), Belgrade, Serbia, 20–21 November 2018; pp. 1–5. [Google Scholar]
- Sung, W.T.; Lu, C.Y. Smart warehouse management based on IoT architecture. In Proceedings of the 2018 International Symposium on Computer, Consumer and Control (IS3C), Taichung, Taiwan, 6–8 December 2018; pp. 169–172. [Google Scholar]
- Tang, Y.M.; Ho, G.T.S.; Lau, Y.Y.; Tsui, S.Y. Integrated smart warehouse and manufacturing management with demand forecasting in small-scale cyclical industries. Machines 2022, 10, 472. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Zhong, Z.; Yang, M.; Chen, R.; Ding, J.; Ma, Z.; Sun, G.; Liu, C. 5G for Railways: Next Generation Railway Dedicated Communications. IEEE Commun. Mag. 2022, 60, 130–136. [Google Scholar] [CrossRef]
- Khurpade, J.M.; Rao, D.; Sanghavi, P.D. A Survey on IOT and 5G Network. In Proceedings of the 2018 International Conference on Smart City and Emerging Technology (ICSCET), Mumbai, India, 5 January 2018; pp. 1–3. [Google Scholar] [CrossRef]
- Song, Y.; Yu, F.R.; Zhou, L.; Yang, X.; He, Z. Applications of the Internet of Things (IoT) in Smart Logistics: A Comprehensive Survey. IEEE Internet Things J. 2021, 8, 4250–4274. [Google Scholar] [CrossRef]
- Das, A.K.; Roy, S.; Bandara, E.; Shetty, S. Securing Age-of-Information (AoI)-Enabled 5G Smart Warehouse Using Access Control Scheme. IEEE Internet Things J. 2023, 10, 1358–1375. [Google Scholar] [CrossRef]
- Nath, S.; Sarkar, B. An integrated cloud manufacturing model for warehouse selection in a smart supply chain network: A comparative study. J. Inst. Eng. Ser. C 2020, 101, 25–41. [Google Scholar] [CrossRef]
- Al-Shammari, B.K.J.; Hburi, I.; Idan, H.R.; Khazaal, H.F. An Overview of mmWave Communications for 5G. In Proceedings of the 2021 International Conference on Communication & Information Technology (ICICT), Basrah, Iraq, 5–6 June 2021; pp. 133–139. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Stüber, G.L.; Wang, G.; Zhong, Z. Geometrical-Based Modeling for Millimeter-Wave MIMO Mobile-to-Mobile Channels. IEEE Trans. Veh. Technol. 2018, 67, 2848–2863. [Google Scholar] [CrossRef]
- Ma, Z.; Ai, B.; He, R.; Zhong, Z.; Yang, M. A Non-Stationary Geometry-Based MIMO Channel Model for Millimeter-Wave UAV Networks. IEEE J. Sel. Areas Commun. 2021, 39, 2960–2974. [Google Scholar] [CrossRef]
- He, R.; Schneider, C.; Ai, B.; Wang, G.; Zhong, Z.; Dupleich, D.A.; Thomae, R.S.; Boban, M.; Luo, J.; Zhang, Y. Propagation Channels of 5G Millimeter-Wave Vehicle-to-Vehicle Communications: Recent Advances and Future Challenges. IEEE Veh. Technol. Mag. 2020, 15, 16–26. [Google Scholar] [CrossRef]
- Busari, S.A.; Huq, K.M.S.; Mumtaz, S.; Dai, L.; Rodriguez, J. Millimeter-Wave Massive MIMO Communication for Future Wireless Systems: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 836–869. [Google Scholar] [CrossRef]
- Uwaechia, A.N.; Mahyuddin, N.M. A Comprehensive Survey on Millimeter Wave Communications for Fifth-Generation Wireless Networks: Feasibility and Challenges. IEEE Access 2020, 8, 62367–62414. [Google Scholar] [CrossRef]
- Alsabah, M.; Naser, M.A.; Mahmmod, B.M.; Abdulhussain, S.H.; Eissa, M.R.; Al-Baidhani, A.; Noordin, N.K.; Sait, S.M.; Al-Utaibi, K.A.; Hashim, F. 6G Wireless Communications Networks: A Comprehensive Survey. IEEE Access 2021, 9, 148191–148243. [Google Scholar] [CrossRef]
- He, R.; Ai, B.; Wang, G.; Yang, M.; Huang, C.; Zhong, Z. Wireless Channel Sparsity: Measurement, Analysis, and Exploitation in Estimation. IEEE Wirel. Commun. 2021, 28, 113–119. [Google Scholar] [CrossRef]
- Jiang, T.; Zhang, J.; Tang, P.; Tian, L.; Zheng, Y.; Dou, J.; Asplund, H.; Raschkowski, L.; D’Errico, R.; Jämsä, T. 3GPP Standardized 5G Channel Model for IIoT Scenarios: A Survey. IEEE Internet Things J. 2021, 8, 8799–8815. [Google Scholar] [CrossRef]
- Gulia, R.S.; Mamun, S.A.; Vashist, A.; Ganguly, A.; Hochgraf, C.; Kwasinski, A.; Kuhl, M.E. Evaluation of Wireless Connectivity in an Automated Warehouse at 60 GHz. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 7–9 January 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Sun, S.; Rappaport, T.S.; Shafi, M.; Tang, P.; Zhang, J.; Smith, P.J. Propagation Models and Performance Evaluation for 5G Millimeter-Wave Bands. IEEE Trans. Veh. Technol. 2018, 67, 8422–8439. [Google Scholar] [CrossRef]
- Wang, C.; Bian, J.; Sun, J.; Zhang, W.; Zhang, M. A Survey of 5G Channel Measurements and Models. IEEE Commun. Surv. Tutor. 2018, 20, 3142–3168. [Google Scholar] [CrossRef]
- Pang, L.; Zhang, J.; Zhang, Y.; Huang, X.; Chen, Y.; Li, J. Investigation and comparison of 5G channel models: From QuaDRiGa, NYUSIM, and MG5G perspectives. Chin. J. Electron. 2022, 31, 1–17. [Google Scholar]
- Mi, H.; Ai, B.; He, R.; Zhou, X.; Ma, Z.; Yang, M.; Zhong, Z. Millimeter Wave Channel Measurement and Analysis in Smart Warehouse Scenario. In Proceedings of the 2022 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (AP-S/URSI), Denver, CO, USA, 10–15 July 2022; pp. 211–212. [Google Scholar] [CrossRef]
- Cano, C.; Sim, G.H.; Asadi, A.; Vilajosana, X. A Channel Measurement Campaign for mmWave Communication in Industrial Settings. IEEE Trans. Wirel. Commun. 2021, 20, 299–315. [Google Scholar] [CrossRef]
- Osa, J.; Björsell, N.; Ängskog, P.; Val, I.; Mendicute, M. 60 GHz mmWave Signal Propagation Characterization in Workshop and Steel Industry. In Proceedings of the 2023 IEEE 19th International Conference on Factory Communication Systems (WFCS), Pavia, Italy, 26–28 April 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, T.; Tang, P.; Song, Q.; Zhao, X.; Tian, L.; Zhang, J.; Liu, B. Measurement-based Analysis and Modeling of Channel Characteristics in an Industrial Scenario at 28 GHz. In Proceedings of the 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall), Virtual, 27 September–28 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Schmieder, M.; Undi, F.; Peter, M.; Koenig, E.; Keusgen, W. Directional Wideband Channel Measurements at 28 GHz in an Industrial Environment. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Big Island, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Schmieder, M.; Eichler, T.; Wittig, S.; Peter, M.; Keusgen, W. Measurement and Characterization of an Indoor Industrial Environment at 3.7 and 28 GHz. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Fleury, B.; Tschudin, M.; Heddergott, R.; Dahlhaus, D.; Ingeman Pedersen, K. Channel parameter estimation in mobile radio environments using the SAGE algorithm. IEEE J. Sel. Areas Commun. 1999, 17, 434–450. [Google Scholar] [CrossRef]
- Mi, H.; Ai, B.; He, R.; Zhou, X.; Ma, Z.; Yang, M.; Zhong, Z.; Wang, N. Multi-scenario millimeter wave wireless channel measurements and sparsity analysis. China Commun. 2022, 19, 16–31. [Google Scholar] [CrossRef]
- Ai, B.; Guan, K.; He, R.; Li, J.; Li, G.; He, D.; Zhong, Z.; Huq, K.M.S. On Indoor Millimeter Wave Massive MIMO Channels: Measurement and Simulation. IEEE J. Sel. Areas Commun. 2017, 35, 1678–1690. [Google Scholar] [CrossRef]
- Document TR 38.901 V16.1.0, 3GPP. Study on Channel Model for Frequencies from 0.5 to 100 GHz. 2020. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3173 (accessed on 11 January 2020).
- Kyosti, P. WINNER II Channel Models. Ist Technical Report Ist-4-027756 Win. Ii D1. 1.2 V1. 2. 2007. Available online: https://www.mathworks.com/help/comm/ug/winner-ii-channel.html (accessed on 30 September 2007).
- Sun, S.; Rappaport, T.S.; Thomas, T.A.; Ghosh, A.; Nguyen, H.C.; Kovács, I.Z.; Rodriguez, I.; Koymen, O.; Partyka, A. Investigation of Prediction Accuracy, Sensitivity, and Parameter Stability of Large-Scale Propagation Path Loss Models for 5G Wireless Communications. IEEE Trans. Veh. Technol. 2016, 65, 2843–2860. [Google Scholar] [CrossRef]
- Cai, X.; Zhang, G.; Zhang, C.; Fan, W.; Li, J.; Pedersen, G.F. Dynamic Channel Modeling for Indoor Millimeter-Wave Propagation Channels Based on Measurements. IEEE Trans. Commun. 2020, 68, 5878–5891. [Google Scholar] [CrossRef]
- Friis, H.T. A note on a simple transmission formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Erden, F.; Ozdemir, O.; Guvenc, I. 28 GHz mmWave Channel Measurements and Modeling in a Library Environment. In Proceedings of the 2020 IEEE Radio and Wireless Symposium (RWS), San Antonio, TX, USA, 26–29 January 2020; pp. 52–55. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Guo, X.; Lin, L. Wideband Channel Measurement Over the Horizon. In Proceedings of the 2018 12th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Wang, L.; Ai, B.; He, D.; Yi, H.; Zhong, Z.; Kim, J. Channel characterisation in rural railway environment at 28 GHz. IET Microw. Antennas Propag. 2019, 13, 1052–1059. [Google Scholar] [CrossRef]
- Chen, Y.; Beaulieu, N. Maximum likelihood estimation of the K factor in Ricean fading channels. IEEE Commun. Lett. 2005, 9, 1040–1042. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | 28 GHz |
| Bandwidth | 1 GHz |
| Number of frequency point | 1001 |
| Delay resolution | 1 ns |
| Intermediate frequency bandwidth | 500 Hz |
| Tx antenna | Horn antenna |
| Rx antenna | 4 × 8 array antenna |
| Transmit power | 20 dBm |
| Maximum excess delay | 1000 ns |
| Maximum MPCs length | 300 m |
| Scenarios | Parameters | ||
|---|---|---|---|
| Intelligent forklift truck | 1.82 | 61.75 | 0.32 |
| Stacking and shuttle car | 3.94 | 50.41 | 3.47 |
| AGV (LOS) | 1.63 | 64.23 | 0.31 |
| AGV (OLOS) | 1.93 | 66.15 | 0.86 |
| Scenarios | Parameters | |
|---|---|---|
| Intelligent forklift truck | 2.10 | 0.024 |
| Stacking and shuttle car | 2.08 | 0.028 |
| AGV (LOS) | 2.11 | 0.033 |
| Scenarios | Parameters | |
|---|---|---|
| Intelligent forklift truck | 4.16 | 0.93 |
| Stacking and shuttle car | 0.70 | 1.46 |
| AGV (LOS) | 1.71 | 1.86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mi, H.; Ai, B.; He, R.; Wu, T.; Zhou, X.; Zhong, Z.; Zhang, H.; Chen, R. Multi-Scenario Millimeter Wave Channel Measurements and Characteristic Analysis in Smart Warehouse at 28 GHz. Electronics 2023, 12, 3373. https://doi.org/10.3390/electronics12153373
Mi H, Ai B, He R, Wu T, Zhou X, Zhong Z, Zhang H, Chen R. Multi-Scenario Millimeter Wave Channel Measurements and Characteristic Analysis in Smart Warehouse at 28 GHz. Electronics. 2023; 12(15):3373. https://doi.org/10.3390/electronics12153373
Chicago/Turabian StyleMi, Hang, Bo Ai, Ruisi He, Tong Wu, Xin Zhou, Zhangdui Zhong, Haoxiang Zhang, and Ruifeng Chen. 2023. "Multi-Scenario Millimeter Wave Channel Measurements and Characteristic Analysis in Smart Warehouse at 28 GHz" Electronics 12, no. 15: 3373. https://doi.org/10.3390/electronics12153373