
Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road

School of Automobile and Traffic Engineering, Wuhan University of Science and Technology, Wuhan 430065, China
*
Author to whom correspondence should be addressed.
Electronics 2023, 12(16), 3490; https://doi.org/10.3390/electronics12163490
Submission received: 12 July 2023
/
Revised: 15 August 2023
/
Accepted: 16 August 2023
/
Published: 17 August 2023
(This article belongs to the Special Issue Advanced Research in Automatic Driving for Electric Vehicles)
Abstract
:To address the issue of incorrect recognition in the automatic emergency braking (AEB) systems on curved roads, a target recognition model is proposed to obtain the road curvature and to calculate the relative lateral distance. Based on the information from the ego vehicle and the preceding vehicles, the accurate selection of the hazardous target is accomplished. After identifying the dangerous target, a control strategy based on the fusion algorithm is proposed, because the safety distance model and the Time-to-Collision (TTC) model both have their limitations and cannot ensure driving safety and comfort simultaneously. The TTC model is optimized according to the actual relative distance between two vehicles on curved roads, the graded warning strategy and braking intervention time are established by the TTC model. And then the graded braking strategy is designed according to the safety distance model. The simulation platform is built based on Carsim and Simulink for verification and analysis. The results demonstrate that the proposed AEB control strategy on curved roads can accurately and efficiently identify the target vehicles on curved roads, avoid false triggering issues, and improve the AEB system’s reliability. And effectively avoid collisions with target vehicles that are in the same lane, improving driving safety and comfort.
1. Introduction
To increase driving safety and comfort, the development of Advanced Driving Assistance Systems (ADAS) is increasing in various countries [1]. The Automatic Emergency Braking (AEB) system is one of the representative functions. Without interfering with the driver’s routine activities, the AEB system should reliably recognize front targets, evaluate the risk of collision, determine a reasonable intervention time, and achieve safe collision avoidance in a variety of traffic scenarios. Curved roads are a frequent occurrence while driving on both intercity and urban roads. According to the study [2], while driving, vehicles fitted with the AEB systems show differences in performance on curved and straight roads. In particular, the probability of rear-end collisions is significantly greater when driving on curved roads than when driving on straight roads.
Currently, researchers primarily focus on the warning/braking control strategies of the AEB system, with the majority of validation scenarios being on straight roads. It was overlooked that when driving on curved roads, the AEB system may incorrectly identify vehicles in the adjacent lane as vehicles in the same lane. It can lead to erroneous triggering of the AEB system, affecting normal driving and potentially creating a risk of accidents. According to NHTSA’s investigation [3], there were 176 instances of erroneous activations of Chrysler’s AEB system between 2012 and 2015. And the Nissan Rogue received 893 unexpected complaints about its AEB system during 2017–2018, primarily due to incorrect warnings and braking by the AEB system on curved roads. To reduce the issue of misidentification of the AEB system on curved roads, it is essential to accurately identify the preceding vehicle and select the most critical targets with the highest collision risks. This is a key problem that needs to be addressed. Target recognition is accomplished by locating targets using sensors and combining the data collected about the immediate environment. According to the different sensors, there are three main methods. The first method is based on machine vision, the article [4] extracts lane lines by identifying the pixel points of lane lines in the video and uses a machine vision-based approach to detect vehicles. This method effectively reduces the interference of high-light environments on target tracking. The article [5] proposes a MobileNetV3 model based on the encoder-decoder architecture and the multitask learning approach. Experimental results show that this model effectively improves the object detection speed and exhibits good adaptability to different environmental conditions. The article [6] uses an image recognition method for lane line detection, taking into account vehicle steering angle changes, to calculate the curvature of the road. The second method is based on multi-sensor fusion, the article [7] uses GPS and vehicle-to-vehicle communication sensors to estimate driving trajectories and relative positions of surrounding vehicles. The article [8] proposes a target-tracking method that combines information from a laser radar and a camera by fusing them. In this method, radar data is used to detect objects while white lane lines are produced from camera images using image processing techniques. The target vehicles are then filtered based on their relative motion and position information for the white lane markings. The third method is based on the information of the ego vehicle and information detected by the millimeter-wave radar. Bosch and Delphi [9,10] use a method based on data from the preceding vehicle to predict the lane, where they fit the historical trajectory of the preceding vehicle and forecast the curvature radius of the curve. The article [11] predicts the ego vehicle’s trajectory using its state curve integration and establishes the lane relationship between the target and ego vehicles using the position relationships between points and geometric elements. The article [12] proposes a method for tracking target vehicles under variable curvature road conditions. A phase map is first created using azimuth and relative velocity, after which the target vehicle’s trajectory is indicated on the phase map. To estimate road curvature online, the article [13] employs the extended Kalman filter to determine the angular velocity of vehicle transverse sway in real-time. The article [14] designs a bend compensation algorithm based on the reference circular angle to achieve multi-target recognition. The first two methods used in the AEB system may not always match the demands of real-time performance and precision for emergency braking on curved roads. Since they entail several sensors and complicated, time-consuming algorithms. The method based on millimeter-wave radar and vehicle data, in comparison, has fewer influencing factors, a faster rate of computation, and simpler access to vehicle data. Therefore, this study adopts the method based on the information of the ego vehicle and information detected by the millimeter-wave radar to design the target recognition model.
After selecting the target vehicle with collision risk, the vehicle should be controlled for warning/braking. The most commonly used control strategies are the safety distance model and the Time-to-Collision (TTC) model. The article in [15] investigates steering collision avoidance on curved roads without considering the emergency braking strategy of the vehicle. The article in [16] considers various factors and establishes the Driver–Road–Vehicle factor (DRV) longitudinal safety distance model to achieve emergency braking. The article in [17] designs a graded warning/braking algorithm that takes into account driver characteristics. The article in [18] assesses the risk of collisions in terms of the inverse of the collision time and develops a graded control strategy. The article in [19] establishes a graded braking strategy based on the TTC model and optimizes driving comfort by adding a braking buffer in some braking phases. Two measures [20,21] were developed based on the TTC to assess the risks. It corresponds to the Time-Exposed Time-to-Collision (TET) and the modified Time-Integrated Time-to-Collision (TIT). It is found that the crash risks increased and even resulted in traffic oscillations without appropriate parameter settings. Based on the Minimizing Overall Braking Induced by Lane Changes Model (MOBIL) and Intelligent Driver Model (IDM), the article in [22] provides a connected and automated vehicle (CAV) platform and a cooperative lane-changing strategy to improve traffic operation and safety in the CAV environment. The article in [23] selects three surrogate safety measures (SSMs) to evaluate traffic safety, including Criticality Index Function (CIF), Potential Index for Collision with Urgent Deceleration (PICUD), and Deceleration Rate to Avoid a Crash (DRAC). With increasing MPR, collision risk identified via CIF and DRAC shows an increased tendency, while that identified via PICUD has no apparent trend. In the AEB system, the safety distance model focuses on driving safety and the TTC model prioritizes driving comfort. There is a lack of control strategies that consider both safety and comfort.
In conclusion, the AEB system’s target recognition is well developed for straight-ahead driving conditions. But, it ignores the possibility of incorrect recognition on curved roads. As a result of the rapid braking, the vehicle’s stability may be compromised, and the driver may have uncomfortable feelings. To address the issue of incorrect target recognition in AEB systems on curved roads, this study utilizes the information of the ego vehicle and information detected using the millimeter-wave radar to obtain the road curvature and relative distance. Then, the relative lateral distance is calculated to determine the positional relationship between the ego vehicle and the target vehicle, accurately recognizing the preceding vehicles. The safety distance concept emphasizes safety in the AEB control strategy. Emergency braking starts when the relative distance between two vehicles reaches a set safety distance threshold. Driving comfort may be impacted by the time of the braking, which may be earlier or later than typical braking. The TTC model places a strong emphasis on comfort; however, this strategy may not work while driving at high speeds with a small following distance. As a result, driving safety needs to be improved. The safety distance and TTC models are combined in this study to propose a fusion control strategy for the AEB system on curved roads that takes into account both safety and comfort. The TTC model is optimized based on the actual relative distance between the ego vehicle and the target vehicle on curved roads, taking into consideration the error between the detected relative distance and the actual relative distance on curved roads. A graded warning strategy is designed using the optimized TTC model, and the emergency braking intervention time is determined. When the collision risk reaches a certain level, the minimum safe distance threshold between the ego vehicle and the target vehicle is calculated based on the safety distance model under different braking intensities, a graded braking strategy is designed accordingly. The primary goal is to protect vehicles from erroneous triggering of the AEB system by vehicles in adjacent lanes and successfully preventing collisions with the preceding vehicle in the same lane.
2. Target Recognition on Curved Roads
2.1. Radar Information Preprocessing
Coordinating the transformation of data is an essential aspect of preprocessing radar information. To obtain both longitudinal and lateral information about the target vehicle, the AEB system needs to convert the data detected via the millimeter-wave radar into the ego vehicle’s coordinate system, as presented in Figure 1.
The longitudinal distance (dx) and lateral distance (dy) between the target vehicle and the ego vehicle can be calculated based on the radar detection information.
where s denotes the relative distance between the ego vehicle and the preceding vehicle; θ denotes the azimuth angle between the ego vehicle and the preceding vehicle; dx denotes the longitudinal distance between the ego vehicle and the preceding vehicle; dy denotes the lateral distance between the ego vehicle and the preceding vehicle.
2.2. Road Curvature of the Ego Vehicle
The AEB system may incorrectly identify vehicles in the adjacent lane as vehicles in the same lane due to the impact of road curvature [24]. It is essential to obtain the current road curvature to ensure accurate determination of the relative position between the ego vehicle and the target vehicle. To calculate the current road curvature, this study uses the vehicle’s gyroscope to measure the yaw rate of the ego vehicle (Yaw-rate) and obtains the vehicle speed (V) from the speed sensor [25]. Assuming that the vehicle is moving at a constant speed V, its trajectory is a circle with a fixed radius, as shown in Figure 2.
The vehicle moves at a constant speed, and the time required to complete one revolution is t.
where Yaw-rate denotes the angular velocity of rotation of the vehicle about the vertical axis in the vehicle–body coordinate system.
The distance traveled at this time is L.
where V denotes the speed of the ego vehicle; R denotes the radius of curvature of the currently traveling road.
Combining the above equation, the radius of curvature of the road can be obtained.
2.3. Curve Position Compensation
To accurately identify the relative position between the preceding vehicle and the ego vehicle on curved roads, it is necessary to compensate for the longitudinal and lateral distances between them. This compensation counteracts the influence of the road curvature. Compensating for the distances between the vehicles enables the calculation of the relative lateral distance. This calculation helps to determine whether the target vehicle is driving within the same lane as the ego vehicle. The relative position relationship between the target vehicle and the ego vehicle is shown in Figure 3:
The preceding vehicle is represented by point C in Figure 3, and the road datum center angle between it and the ego vehicle is 2φ.
The vehicle parallel to the target vehicle in the adjacent lane is marked as point D in Figure 3, and the longitudinal distance between it and the ego vehicle is LDE.
The length of CF is LCF.
The length of CD is d, which is the predicted relative lateral distance between the ego vehicle and the preceding vehicle.
Changes in the speed of the ego vehicle impact the predicted relative lateral distance, which leads to an error between the calculated and actual relative lateral distance. Therefore, a correction coefficient, K [26], needs to be added to the calculation of ϕ.
In addition, when the relative distance between the ego vehicle and the target vehicle is close, the value of the road datum center angle (2ϕ) between the ego vehicle and the target vehicle is too small. The lateral distance calculated using Equation (8) may be inaccurate, as shown in Figure 4.
Therefore, in cases where the following distance decreases, the following equation is used to calculate the relative lateral distance.
2.4. Selection of Hazardous Targets
The classification of the preceding vehicle can be determined based on the lane position relationship between the ego vehicle and the preceding vehicle, as demonstrated in Figure 5.
The width of the road is W, which takes the value of 3.75 m. There are three situations in which the risk of collision is judged:
- (1)
- When d > W/2, it is judged that the target vehicle is driving in the right lane and there is no risk of collision.
- (2)
- When −W/2 < d < W/2, it is judged that the target vehicle is driving in this lane with the risk of collision.
- (3)
- When d < −W/2, it is judged that the target vehicle is driving in the left lane without the risk of collision.
3. Fusion Control Strategy of AEB systems
3.1. A Graded Warning Strategy Based on the TTC Model
During the AEB system control strategy design phase, the TTC model is more accessible due to its simplicity in computation, fewer parameters, and flexible time threshold adjustments. Consequently, the TTC model is the main strategy employed in this paper for creating a graded warning strategy and the timing for brake system intervention.
3.1.1. TTC Algorithm
The TTC algorithm starts from the current moment and calculates the time required for two vehicles to travel at the current speed until a collision occurs [27].
It is computed using the following equation. When the preceding vehicle is stationary or moving at a constant speed, the first-order TTC is used. When the preceding vehicle is braking, the second-order TTC is used.
where S denotes the relative distance between the two vehicles; vr denotes the relative velocity of the two vehicles; and ar denotes the relative acceleration of the two vehicles.
Considering the error between the detected relative distance and the actual relative distance on curved roads [28], as shown in Figure 6, the actual relative distance needs to be calculated.
The relative distance between the two vehicles is S, but the actual distance is the length of the arc AB, that is LAB.
The distance between the ego vehicle and the preceding vehicle can be represented by the length s between point A and point B. However, the actual distance is the arc length LAB between point A and point B.
The TTC value in this paper is calculated using the following equation.
3.1.2. TTC Thresholds
According to the article in [29], the probability of avoiding the corresponding accident can be calculated for various braking intensities and crash time thresholds, as presented in Table 1:
According to Table 1, if the driver starts breaking 1.8 s before the collision with a braking intensity of 0.5 g, there is a 95% chance of preventing the collision. This article sets the TTC threshold for braking intervention at 1.7 s, using a partial braking intensity of 0.4 g.
The article in [30] analyzes the driver’s reaction time based on information collected in traffic accidents; the data are presented in Table 2.
According to Table 2, the average reaction time for the warning signal of light alone is approximately 1.13 s, the average time for the warning signal of light and sound combined is approximately 0.9 s, and the brake actuation time is approximately 0.2 s. Therefore, with a TTC threshold of 1.7 s for brake system intervention, it can be deduced that the time threshold for the light warning mode is 2.8 s, and the time threshold for the light and sound combined warning mode is 2.6 s.
Therefore, the time threshold for the light warning mode is set at 2.8 s, the time threshold for the light and sound combined warning mode is set at 2.6 s, and the time threshold for brake system intervention is set at 1.7 s.
3.2. Graded Braking Strategy Based on Safety Distance
3.2.1. Safe Distance Model
This paper utilizes a safety distance model that is based on the braking process of vehicles. Figure 7 illustrates the positional relationship between the preceding and following vehicles during the braking process. Vehicle A (with a speed of VA) and Vehicle B (with a speed of VB) are traveling in the same lane and direction.
The minimum safe distance between the two vehicles is S0.
where SA denotes the distance traveled by vehicle A; SB denotes the distance traveled by vehicle B; and d0 denotes the set minimum relative distance between the two vehicles.
Based on the braking process of vehicles, the calculation equation for S0 can be obtained. As shown in Table 3.
3.2.2. Braking Intensity and Key Parameters
The article in [31] analyzed the crashes and obtained data on the average braking intensity applied by the driver, as shown in Table 4.
Combined with the data in Table 4, the partial braking intensity is set to 0.4 g and the full braking intensity is set to 0.8 g. According to existing research [32], the values of and are set as fixed values. The value of is 0.05 s, and the value of is 0.15 s.
The partial braking distance threshold is S1 and the full braking distance threshold is S2. By plugging in the values of , , the partial braking intensity, and the full braking intensity into the minimum safe distance calculation equation in Table 3, we can derive the values of S1 and S2 for three different working conditions.
3.3. The Overall Process Design of the AEB System on Curved Roads
This paper designs an AEB system on curved roads. Firstly, it identifies the preceding vehicles on curved roads. After selecting the target vehicle with collision risk, it employs a fusion control strategy based on the TTC model and safety distance model. This strategy enables the vehicle to perform warning/braking actions. A flowchart of the overall process is shown in Figure 8.
- (1)
- Target Recognition
The relative lateral distance between the ego vehicle and the preceding vehicle is obtained by calculating the road curvature and relative distance. Vehicles in the same lane and adjacent lanes are identified based on the relative positional relationship between the ego vehicle and the preceding vehicle. After selecting the target vehicle with collision risk, the AEB control strategy is used to control the ego vehicle for warning/braking.
- (2)
- The AEB control strategy
The AEB control strategy presented in this study integrates the TTC model and the safety distance model.
(1) Calculate the TTC value according to the relevant information: when TTC > 2.8 s, the vehicle drives normally without any operation; when TTC < 2.8 s, a light warning is carried out.
(2) When TTC < 2.6 s, carry out combined warning with light and sound.
(3) When TTC < 1.7 s, the brake system starts to intervene and apply graded braking according to the relationship of S0, S1, and S2.
- When S0 ≥ S1, no braking is applied and the current speed is maintained;
- When S2 ≤ S0 < S1, partial braking occurs;
- When S0 < S2, full braking occurs.
4. Simulation Verification and Result Analysis
4.1. Simulation Environment
Carsim2019 and Matlab2021 are used in this study for simulation validation. In the Carsim software, the driving environment is configured (Figure 9). In Matlab/Simulink2021, a curved road target recognition model and the AEB control strategy model were constructed. Please refer to Appendix A for the relevant settings of the Carsim software.
4.1.1. Target Recognition Model Validation
Setting the speed of the preceding vehicle in the same lane to 0 km/h, with an initial relative distance of 50 m, the speed of the preceding vehicle in the adjacent right lane is also 0 km/h, with an initial relative distance of 40 m. The ego vehicle approaches at a speed of 20 km/h. The simulation results are shown in Figure 10.
From the comparison results, it can be seen that when the distance between the ego vehicle and the target vehicles in the adjacent lane is close, the relative lateral distance calculated using the traditional method fluctuates, causing the value of the relative lateral distance to be less than the set threshold (refer to Section 2.4, W/2 = 1.875 m). This could potentially lead to vehicles in the adjacent lane being misidentified as vehicles in the same lane. The method proposed in this study can solve the problem of misidentification when following vehicles at close distances on curved roads.
4.1.2. The AEB Test Conditions
The experiments were conducted according to the AEB test conditions specified by Euro-NCAP, and the specific data are shown in Table 5.
4.1.3. The TTC Model Validation
Compared with the traditional TTC model, taking into account the error between the detected relative distance and the actual relative distance on curved roads, the TTC model is optimized based on the actual relative distance. The optimized TTC model is used to design a graded warning strategy. In the CCRs, CCRm, and CCRb scenarios, a comparative validation was performed between the traditional TTC model and the optimized TTC model. The results are shown in Figure 11.
From the comparison results, due to the relative distance between the ego vehicle and the target vehicle, the distance detected using the radar is smaller than the actual relative distance. When the traditional TTC model is used, the warning time of the AEB system is advanced. However, when the optimized TTC model based on the actual relative distance is used, the warning time of the AEB system becomes more accurate.
4.2. Testing of CCRs
CCRs_2 Test: Setting the speed of the preceding vehicle in the same lane to 0 km/h, with an initial relative distance of 50 m, the speed of the preceding vehicle in the adjacent right lane is also 0 km/h, with an initial relative distance of 40 m. The ego vehicle approaches at a speed of 60 km/h. The simulation results are shown in Figure 12.
Due to the unstable vehicle state in the initial phase of the Carsim software simulation, there are fluctuations in the calculated relative lateral distance during the early stages. As shown in Figure 12a, the relative lateral distance between the ego vehicle and the preceding vehicle in the same lane is kept within the interval of [−1.875,1.875], and the relative lateral distance with the preceding vehicle in the adjacent right lane is kept at about 3.1 m. From Figure 12b, the system detects a risk of collision at 0.29 s and activates the first-level warning state, and a second-level warning signal is issued at 0.49 s. The emergency braking system intervenes, followed by the ego vehicle braking with a deceleration rate of 4 m/s2 at 1.38 s, as presented in Figure 12e. The ego vehicle continues braking until it comes to a stop at 4.45 s, as shown in Figure 12c, the relative distance between the ego vehicle and the preceding vehicle in the adjacent lane decreases to 0 km/h at 2.43 s, and the distance to the preceding vehicle in the same lane is 2.31 m, as shown in Figure 12d.
4.3. Testing of CCRm
CCRm_3 Test: Setting the speed of the preceding vehicle in the same lane to 20 km/h, with an initial relative distance of 50 m, the speed of the preceding vehicle in the adjacent right lane is also 20 km/h, with an initial relative distance of 40 m. The ego vehicle approaches at a speed of 80 km/h. The simulation results are shown in Figure 13.
From Figure 13a, it can be seen that the target recognition model can accurately identify the preceding vehicles in the curved road. As shown in Figure 13b, the AEB system enters the first-level warning at 0.2 s and issues the second-level warning signal at 0.36 s. As shown in Figure 13f, the ego vehicle starts partial braking at 1.22 s and switches to full braking at 3.38 s. As shown in Figure 13c,d, at 4.5 s, the ego vehicle comes to a stop with a distance of 3.02 m from the preceding vehicle in the same lane, ensuring driving safety.
4.4. Testing of CCRb
CCRb_2 Test: Setting the initial relative distance of the preceding vehicle in the same lane to 50 m, with an initial speed of 60 km/h, after 3s, the preceding vehicle starts uniformly decelerating with a deceleration rate of 4 m/s2. The preceding vehicle in the adjacent right lane has an initial relative distance of 40 m and a speed of 30 km/h. The ego vehicle approaches at a speed of 60 km/h. The simulation results are shown in Figure 14.
From Figure 14a, the target recognition model can accurately identify the preceding vehicles. As shown in Figure 14b, the ego vehicle enters the first-level warning state at 9.84 s and the second-level warning state at 9.99 s, and the emergency braking system intervenes at 10.69 s. As shown in Figure 14e, the ego vehicle applies partial braking at 10.86 s. As shown in Figure 14c, the ego vehicle slows down to 0 km/h at 13.9 s. As shown in Figure 14d, the distance between the ego vehicle and the preceding vehicle in the same lane is 3.66 m. The simulation shows that the designed AEB system on curved roads can efficiently recognize the vehicles in the adjacent lane and can apply effective braking to the preceding vehicle in the same lane under the CCRb condition.
4.5. Overall Simulation Results
The overall simulation results are shown in Table 6:
Compared with traditional target recognition methods based on a millimeter-wave radar, this paper incorporates an additional calculation method for the relative lateral distance at close following distances, it can solve the problem of misidentification when following vehicles at close distances on curved roads. Through verification, the target recognition model successfully identifies target vehicles without incorrectly recognizing vehicles in adjacent lanes as vehicles in the same lane.
Compared with the traditional TTC model, the optimized TTC model is performed based on the actual relative distance between the ego vehicle and the target vehicle on curved roads. It is used to design a graded warning strategy. The warning time of the AEB system becomes more accurate. When the collision risk reaches a certain level, the minimum safe distance threshold between the ego vehicle and the target vehicle is calculated based on the safety distance model under different braking intensities, and a graded braking strategy is designed accordingly. The vehicle can perform emergency braking based on the graded braking strategy. The integration of the TTC model and the safety distance model is validated under the test conditions specified by Euro-NCAP, the AEB system will take emergency braking in the dangerous state, and the minimum stopping distance is reasonable.
This shows that the target recognition model and the fusion control strategy are effective.
5. Conclusions
To solve the problem of incorrect recognition of AEB systems on curved roads, a target recognition model is designed. Based on the TTC model and the safety distance model, a fusion control strategy is designed.
(1) This study presents the design of a target recognition model for the AEB system on curved roads. Due to the traditional target recognition method being susceptible to the road datum center angle (2ϕ) when the relative distance between the ego vehicle and the target vehicle being close, this study incorporates an additional target recognition method for close following distances, and it can solve the problem of misidentification when following vehicles at close distances on curved roads. The relative lateral distance between the ego vehicle and the preceding vehicle is obtained by calculating the road curvature and relative distance using information from the ego vehicle and information detected using the millimeter-wave radar. Based on the relative positional relationship between the ego vehicle and the preceding vehicle, vehicles in adjacent lanes and the same lane are recognized. After verification, the AEB systems can use the target recognition model to effectively identify the preceding vehicles, without misidentifying vehicles from adjacent lanes as vehicles in its lane. It eliminates instances of the AEB systems being triggered incorrectly and solves the issue of misidentification of the AEB systems on curved roads.
(2) The AEB control strategy presented in this study integrates the TTC model and the safety distance model. By calculating the TTC value based on the actual relative distance between the ego vehicle and the target vehicle on curved roads, the TTC model is optimized, and the warning time of the AEB system becomes more accurate. Based on the optimized TTC model, a graded warning strategy is designed and the intervention time for emergency braking is determined. When the collision risk reaches a certain level, the minimum safe distance threshold between the ego vehicle and the target vehicle is calculated based on the safety distance model under different braking intensities, and a graded braking strategy is designed accordingly. The vehicle can perform emergency braking based on the graded braking strategy. The verification is performed under the test conditions specified by Euro-NCAP, and the test results meet the requirements of Euro-NCAP. This effectively prevents collisions between the ego vehicle and the preceding vehicles in the same lane while maintaining comfort and safety.
Author Contributions
Conceptualization, L.Z.; methodology, L.Z. and Z.Y.; software, L.Z.; validation, L.Z. and Z.Y.; formal analysis, L.Z.; investigation, L.Z.; resources, L.Z. and X.X.; data curation, L.Z.; writing—original draft preparation, L.Z.; writing—review and editing, L.Z., Z.Y., X.X. and Y.Y.; visualization, Y.Y.; supervision, L.Z., Z.Y., X.X. and Y.Y.; project administration, L.Z.; funding acquisition, L.Z., X.X. and Y.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China [51975428], ”Chunhui Plan” Cooperative Scientific Research Project of the Education Department of China [HZKY20220330] and Guidance Project of Scientific Research Plan of the Education Department of Hubei Province of China [B2022027].
Data Availability Statement
Not applicable.
Acknowledgments
The authors are grateful to the editors and reviewers for their constructive comments, which have significantly improved this work.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
- Set up the vehicle model for the ego car in Carsim2019 software. As shown in Figure A1.
Figure A1.
The ego vehicle model.

The relevant parameters are shown in Table A1.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table A1.
Vehicle parameters.
| Parameter Names | Value | Unit |
|---|---|---|
| Width | 2131 | mm |
| Height | 1825 | mm |
| Wheelbase | 2866 | mm |
| Spring mass | 1370 | kg |
| Unsprung mass | 160 | kg |
| Minimum ground clearance | 375 | mm |
- 2.
- Road model
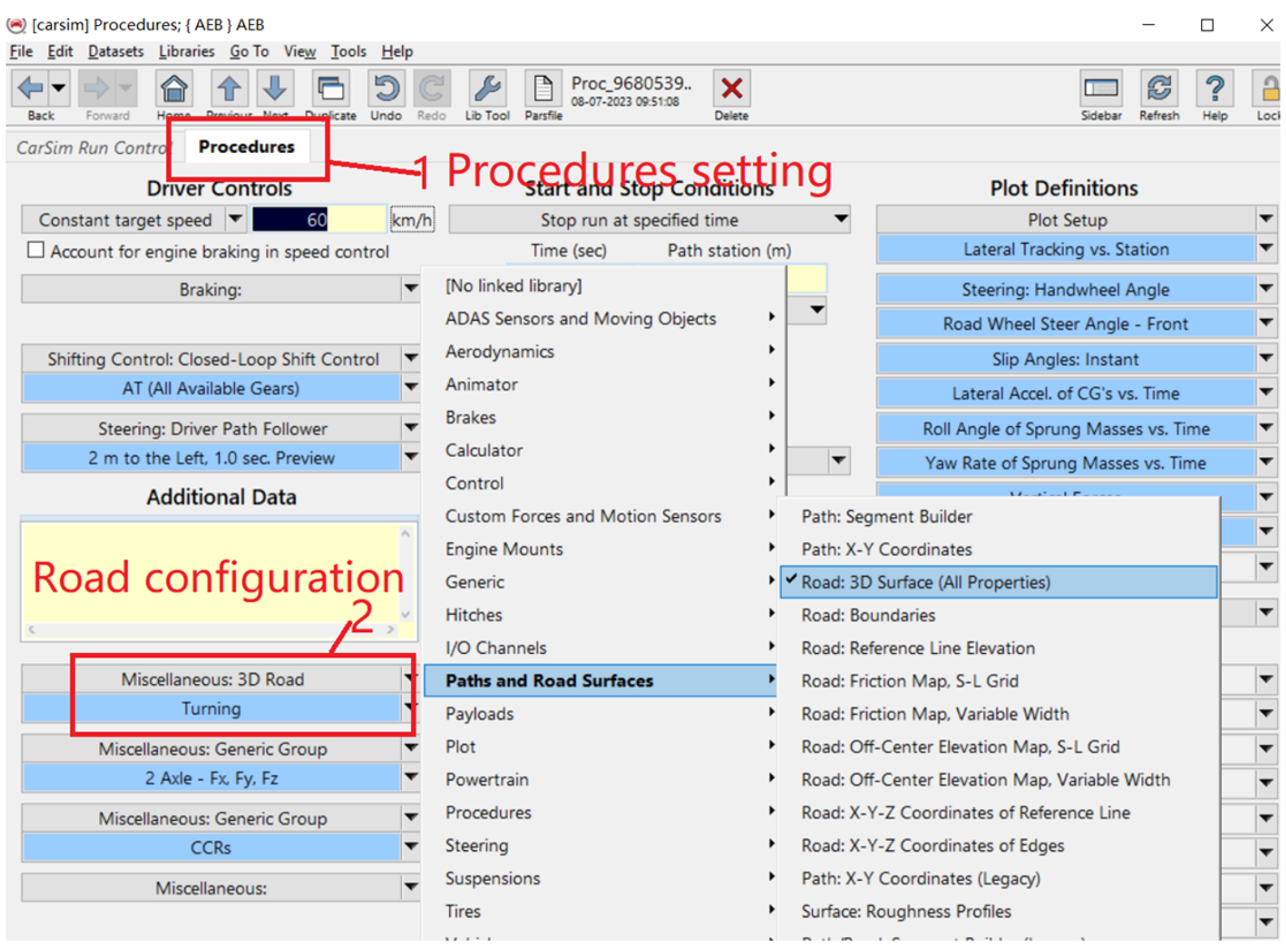
In the Procedures module of Carsim software, select 3D Road. As shown in Figure A2.
Figure A2.
Procedures interface.
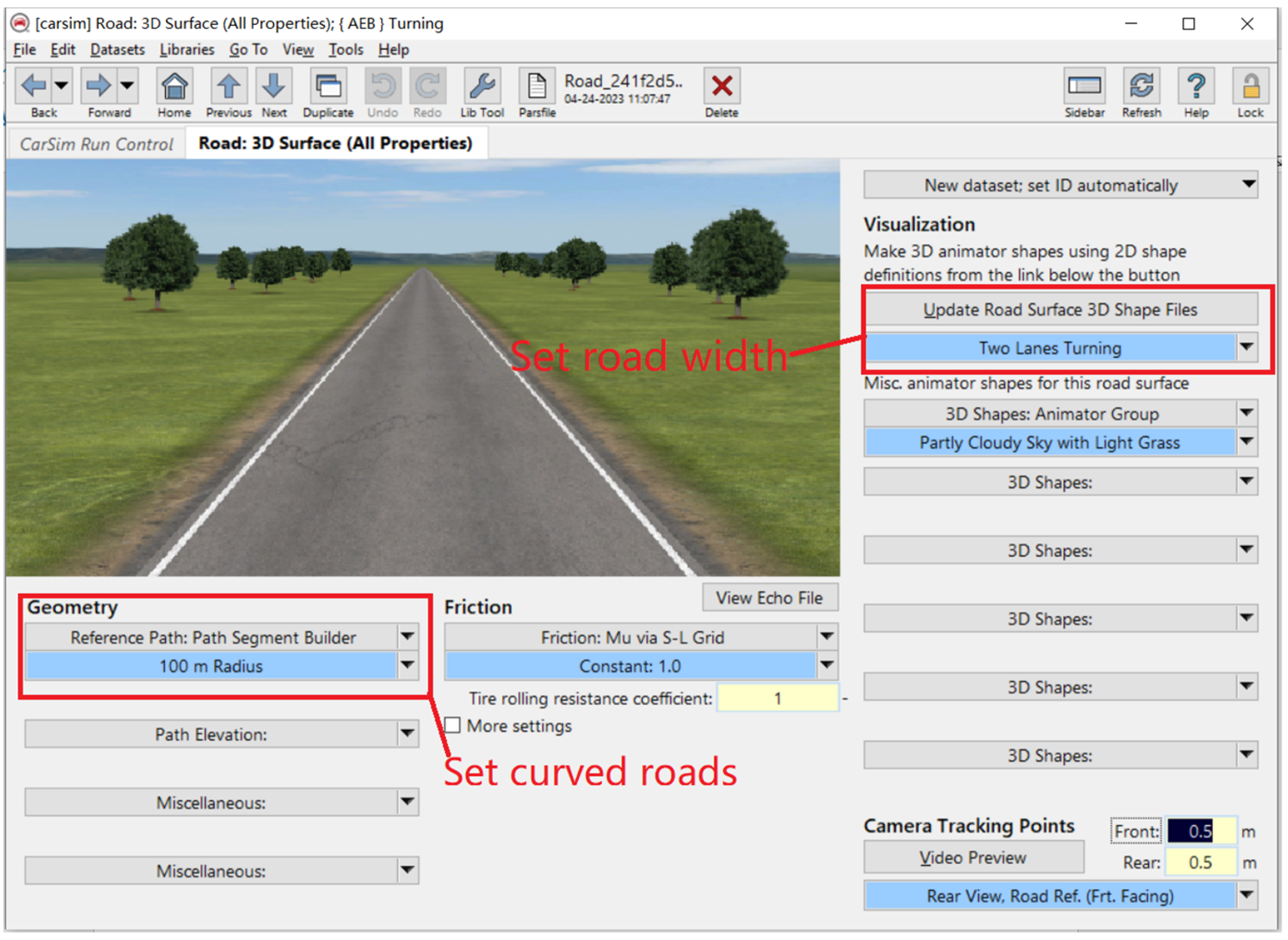
In the Geometry module of the 3D Road interface, set the curved road, and in the Update Road module, set the road width. As shown in Figure A3.
Figure A3.
3D Road.
- 3.
- Millimeter-wave radar and target vehicles
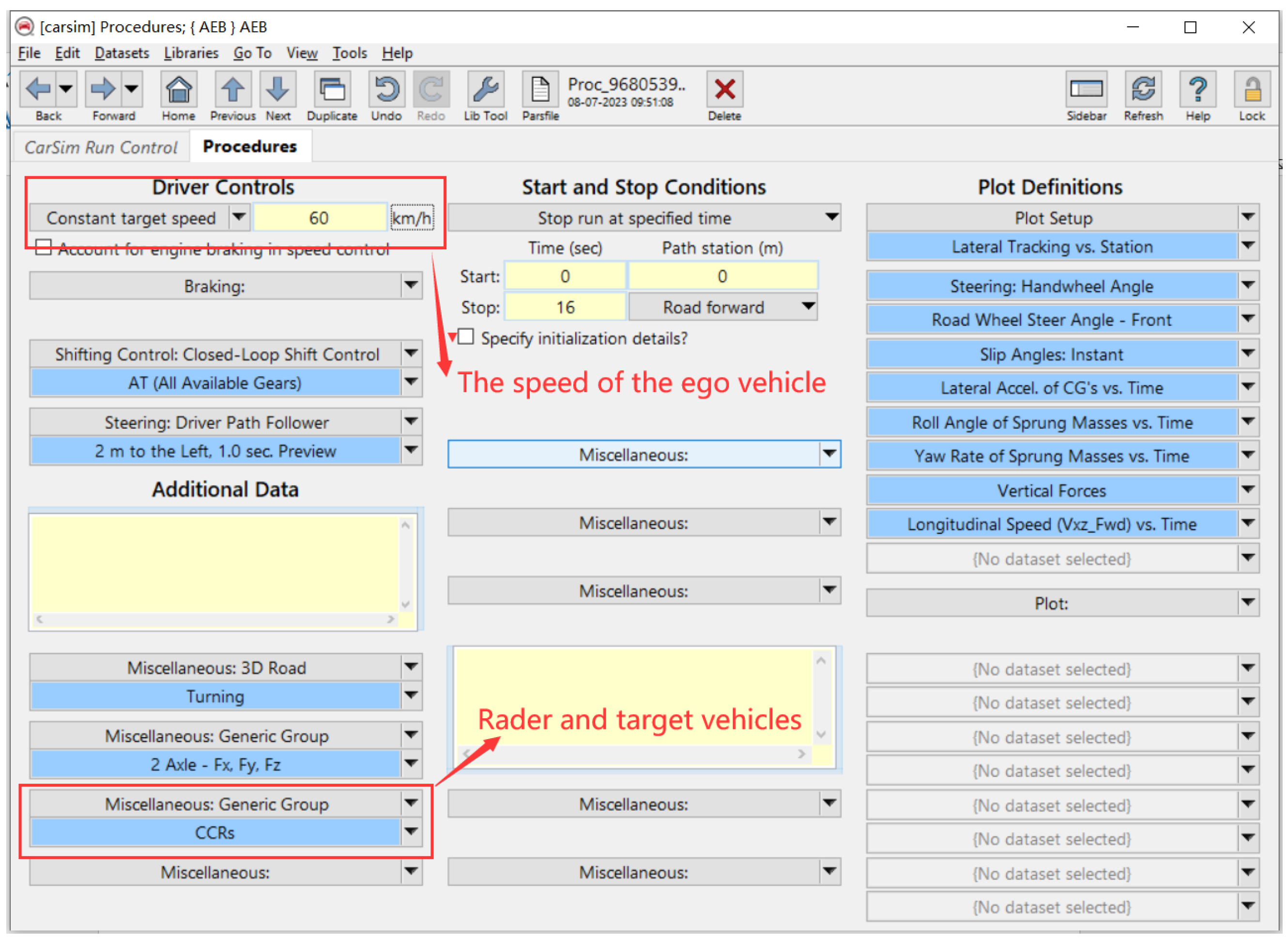
In the Driver Controls module of the Procedures interface, set the speed of the ego vehicle, and in the Generic Group module, set the millimeter-wave radar and target vehicles. As shown in Figure A4.
Figure A4.
Radar and target vehicles.
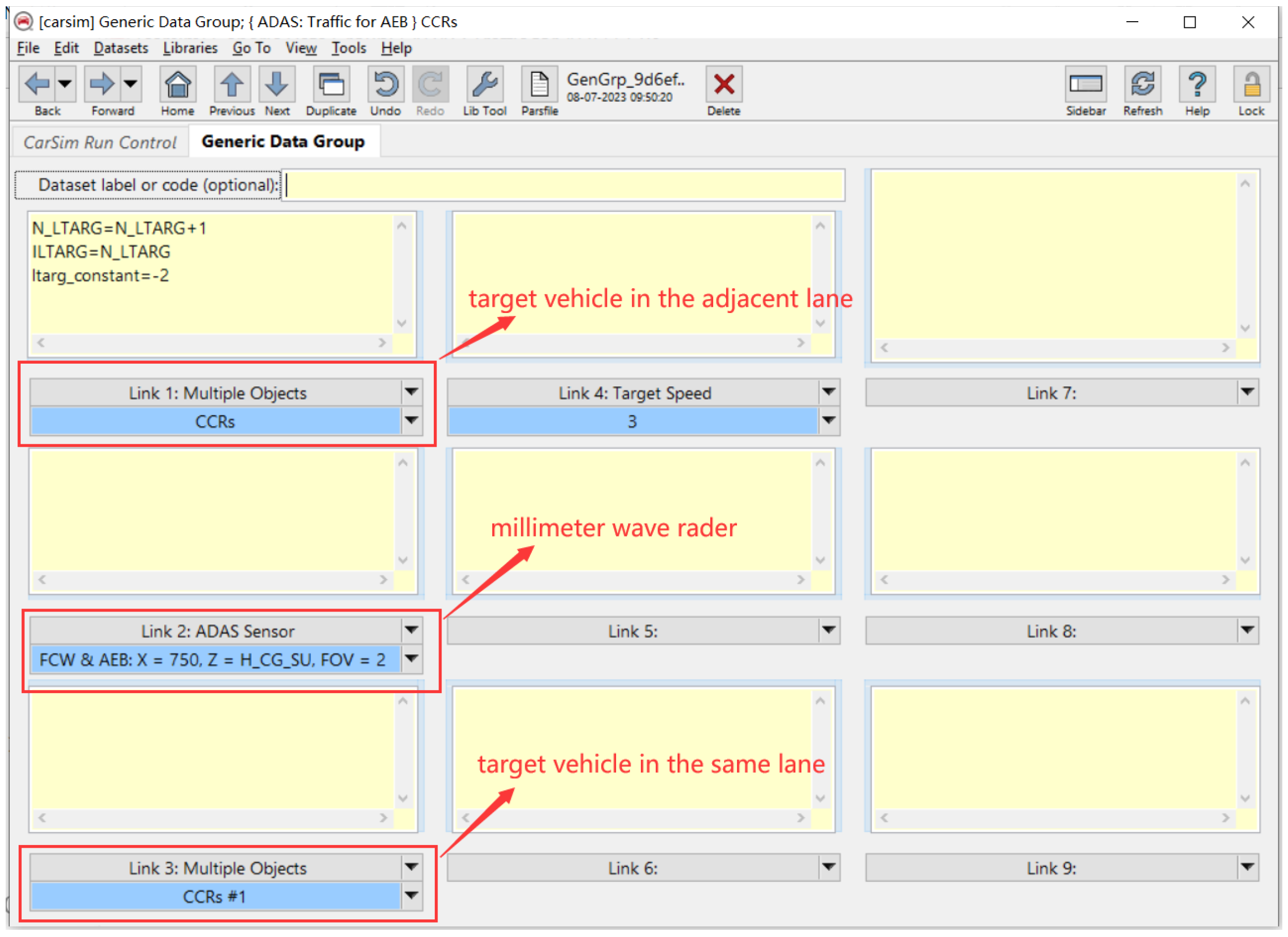
In the Generic Group module, set the models for millimeter-wave radar and target vehicles, as shown in Figure A5.
Figure A5.
Generic Group.
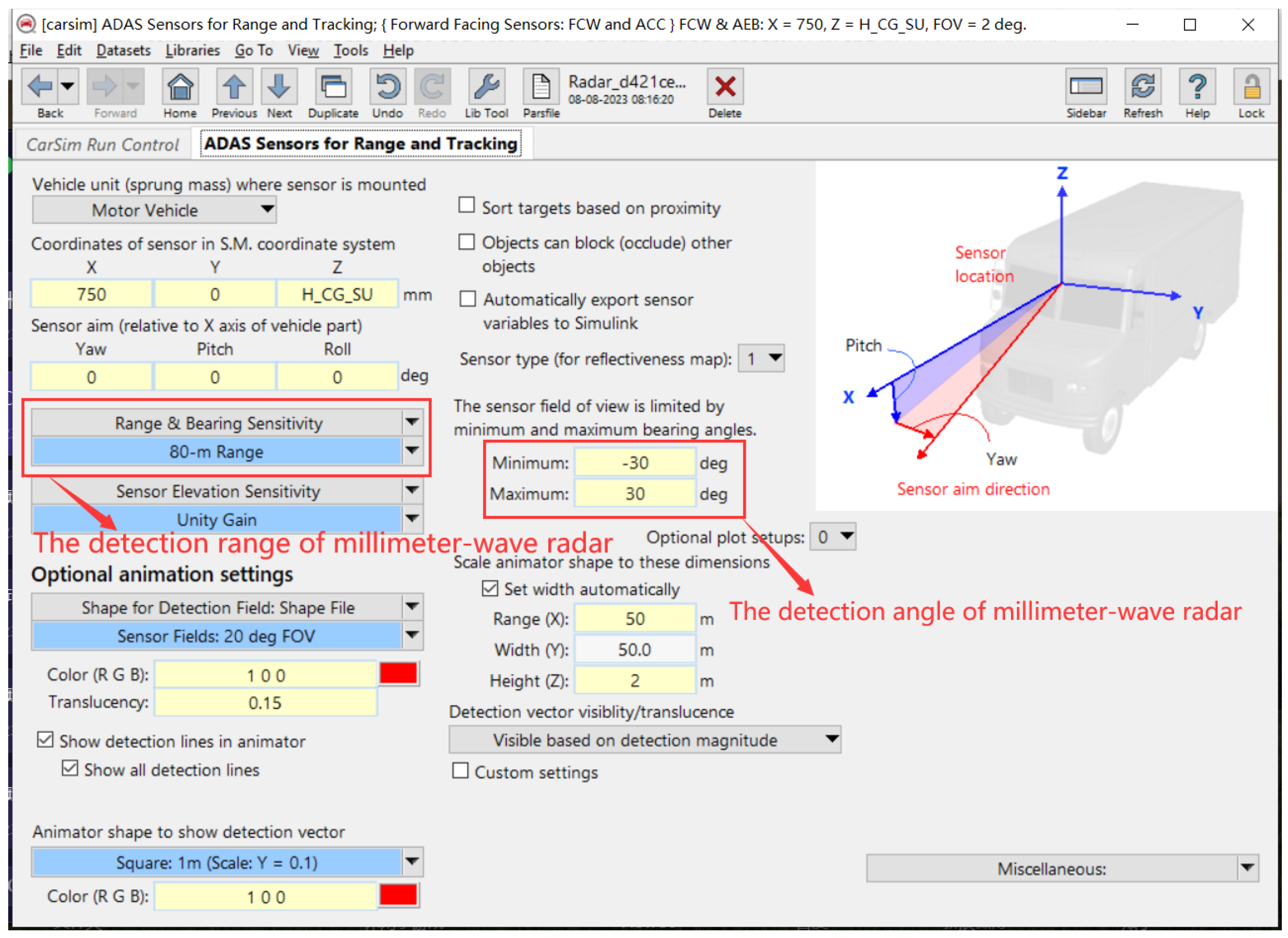
Set the detection range and angle of the millimeter-wave radar in the ADAS Sensor module. As shown in Figure A6.
Figure A6.
The millimeter-wave radar.
Set the target vehicle configurations in the CCRs, CCRm, and CCRb scenarios. The test conditions are as follows in Table A2.
Table A2.
Test conditions.
| Test Conditions | Test Number | The Ego Vehicle Speed (km/h) | Speed of the Preceding Vehicle (km/h) | Initial Distance to the Vehicle in the Same Lane (m) | Initial Distance to the Vehicle in Adjacent Lane (m) | Deceleration (m/s2) |
|---|---|---|---|---|---|---|
| CCRs | CCRs_1 | 50 | 0 | 50 | 40 | 0 |
| CCRs_2 | 60 | 0 | 50 | 40 | 0 | |
| CCRs_3 | 80 | 0 | 50 | 40 | 0 | |
| CCRm | CCRm_1 | 60 | 20 | 50 | 40 | 0 |
| CCRm_2 | 70 | 20 | 50 | 40 | 0 | |
| CCRm_3 | 80 | 20 | 50 | 40 | 0 | |
| CCRb | CCRs_1 | 50 | 50 | 50 | 40 | 4 |
| CCRs_2 | 60 | 60 | 50 | 40 | 4 | |
| CCRs_3 | 70 | 70 | 50 | 40 | 4 |
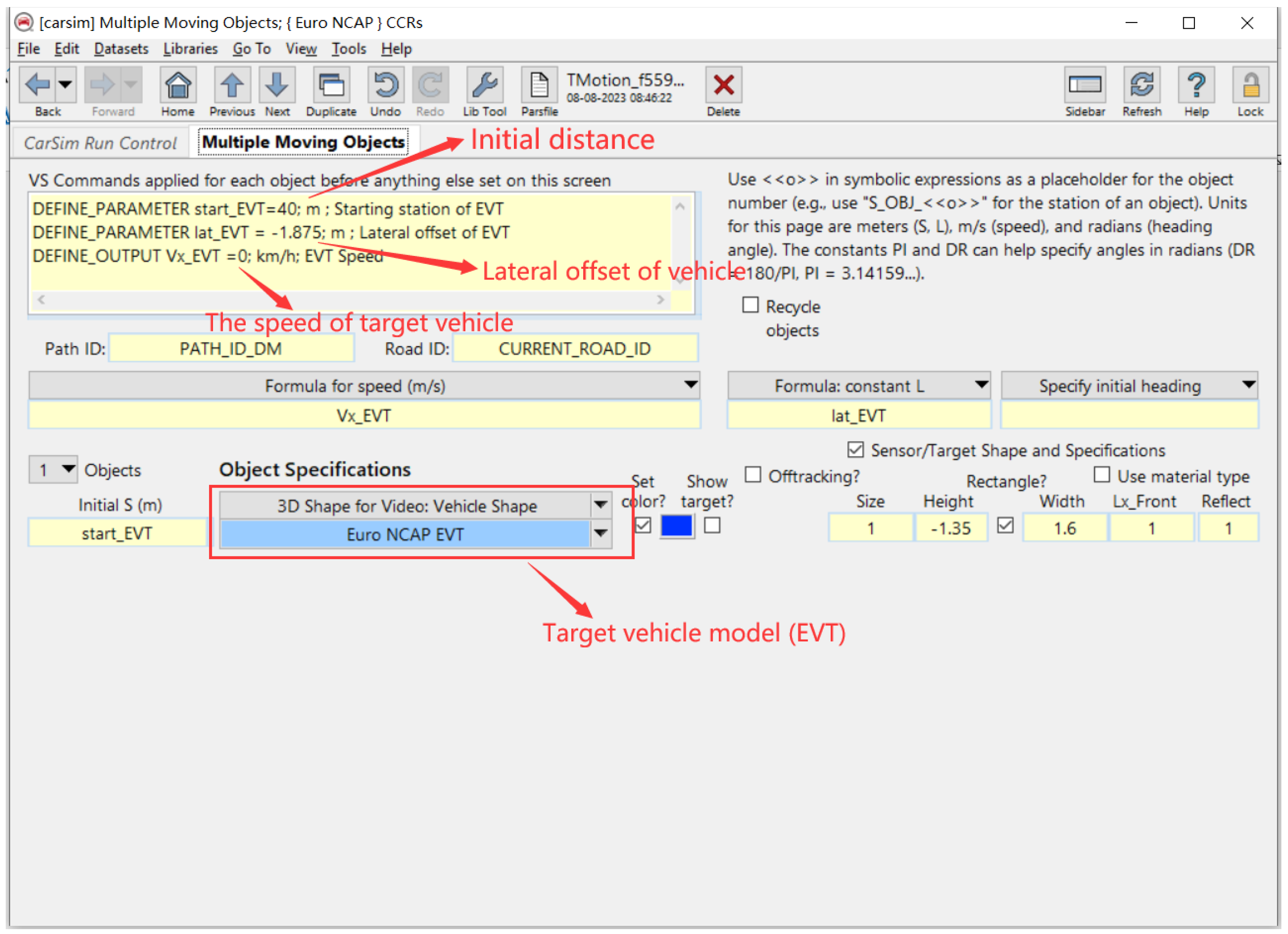
In the Generic Group module of the Carsim software, configure the initial velocity, initial distance, offset, and other information of the target vehicles based on the data in Table A2, and obtain Carsim models for the three scenarios, as shown in Figure A7.
Figure A7.
Target vehicles.
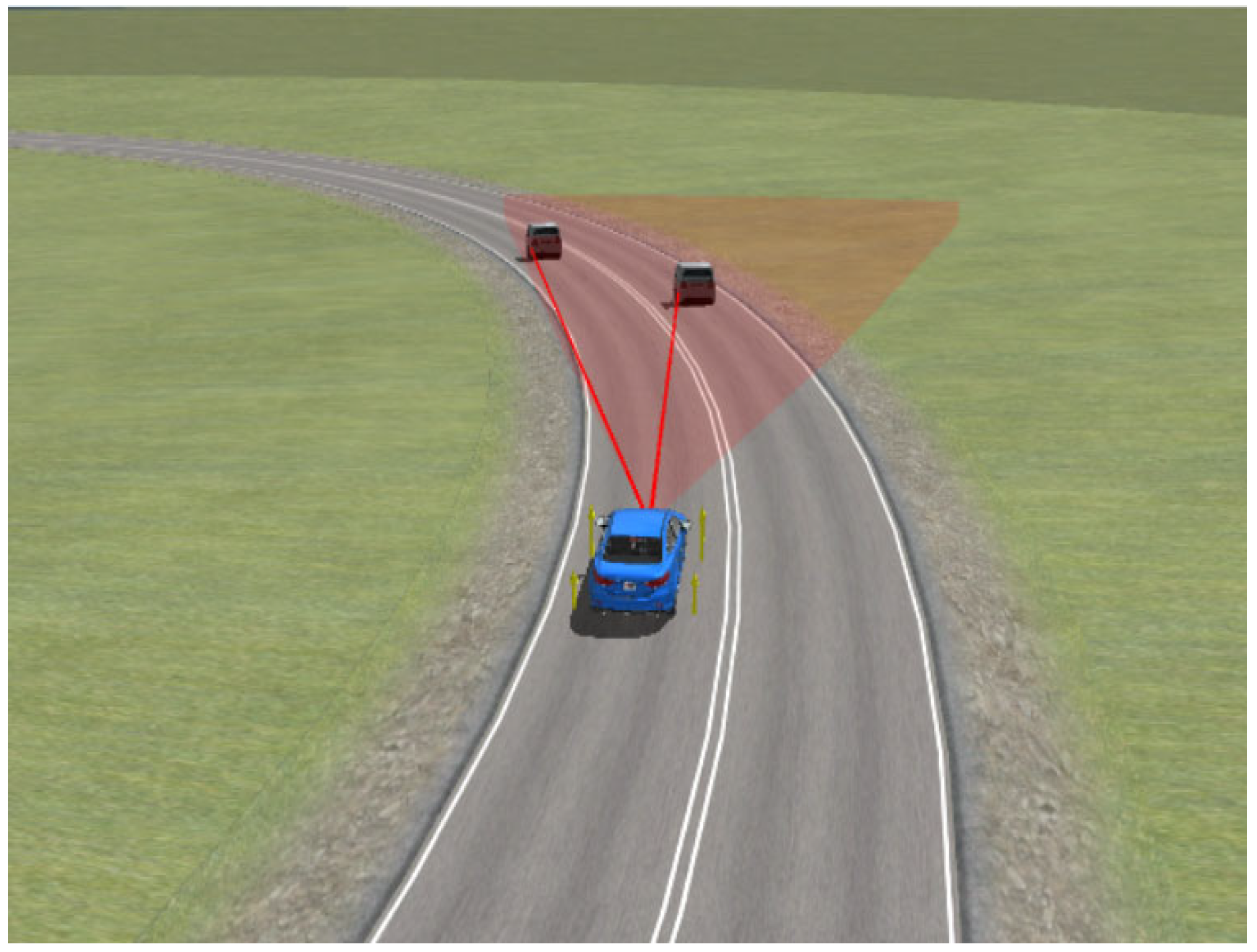
According to the above process, the driving environment is obtained, as shown in Figure A8.
Figure A8.
Driving environment.
- 4.
- Connect Carsim2019 with Simulink2021
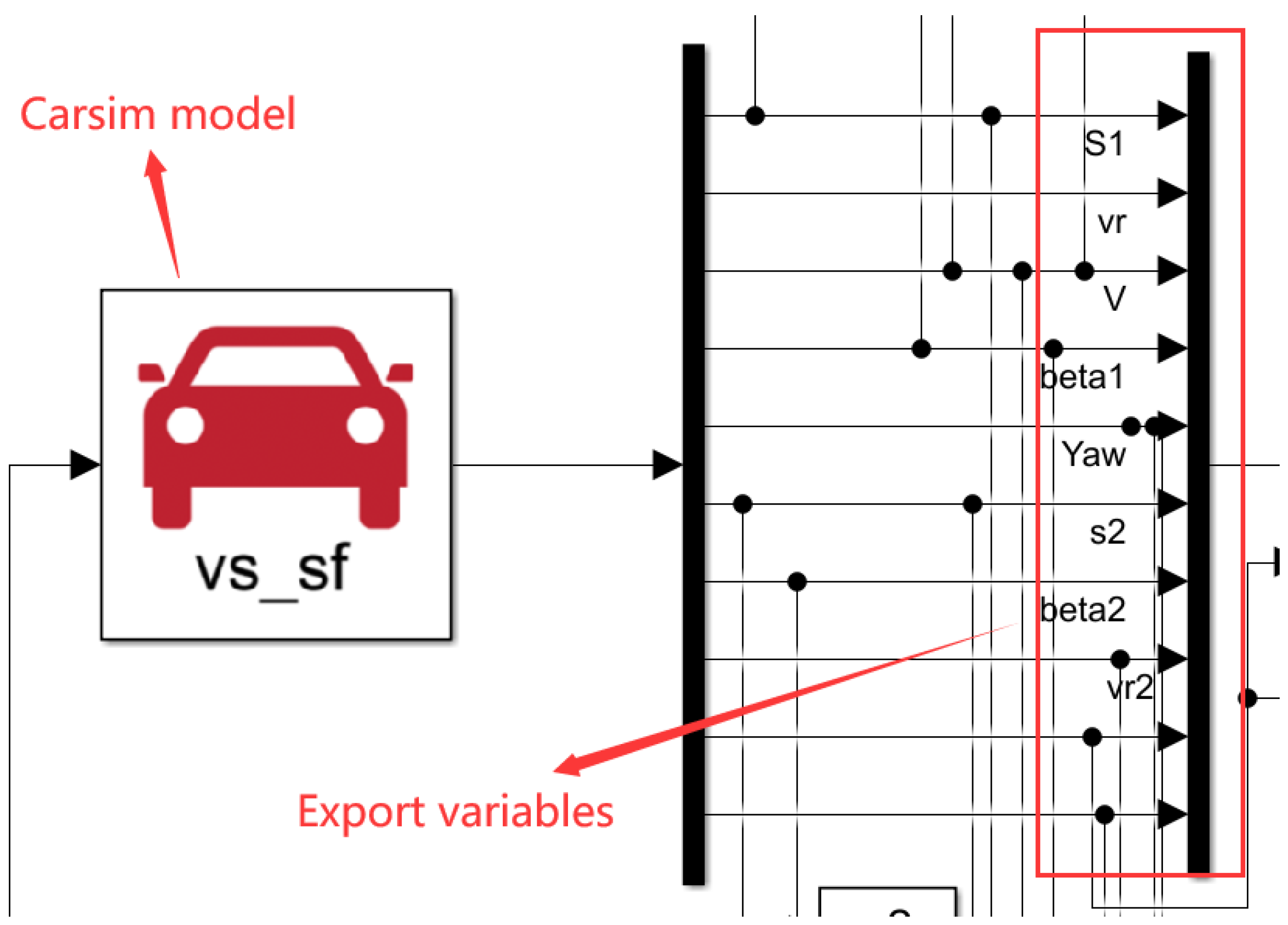
Connecting the Carsim model to Simulink, select the Simulink file in the Carsim interface, and choose the parameters to output from Carsim to Simulink using the Carsimru software, as shown in Figure A9, Figure A10 and Figure A11.
Figure A9.
The Simulink file.

Figure A10.
The export variables.
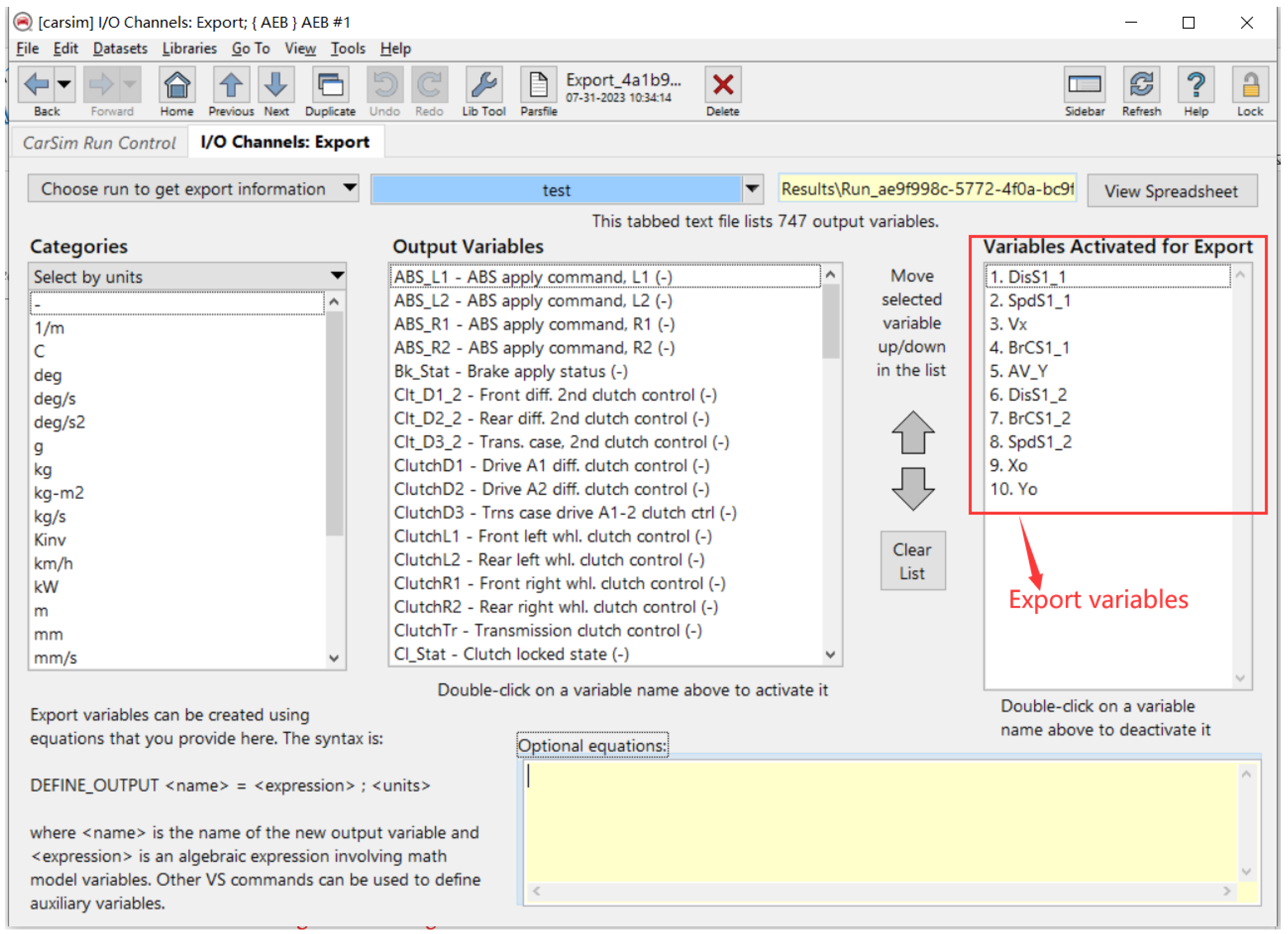
Figure A11.
Carsim model and Simulink model.
After inputting the Carsim model into Simulink, perform target recognition and graded warning/braking based on the Simulink model.
References
- Yang, Z. Research on Causes of Rear-End Collision and Behavior of Avoiding Collision Based on Deep Data Analysis. Ph.D. Thesis, Northeast Forestry University, Harbin, China, 2021. [Google Scholar]
- Cicchino, J.B.; Zuby, D.S. Characteristics of rear-end crashes involving passenger vehicles with automatic emergency braking. Traffic Inj. Prev. 2019, 20 (Suppl. 1), S112–S118. [Google Scholar] [CrossRef]
- Yang, W.; Zhao, H.Y.; Shu, H. Simulation and verification of the control strategies for AEB pedestrian collision avoidance system. J. Chongqing Univ. 2019, 42, 1–10. [Google Scholar]
- Shakouri, P.; Ordys, A. Nonlinear model predictive control approach in design of adaptive cruise control with automated switching to cruise control. Control Eng. Pract. 2014, 26, 160–177. [Google Scholar] [CrossRef]
- Deng, T.; Wu, Y. Simultaneous vehicle and lane detection via MobileNetV3 in car following scene. PLoS ONE 2022, 17, e0264551. [Google Scholar] [CrossRef] [PubMed]
- Suto, J. Real-time lanes line tracking algorithm to mini vehicles. Transp. Telecommun. J. 2021, 22, 461–470. [Google Scholar] [CrossRef]
- Huang, S.J.; Chao, S.T. A new lateral impact warning system with grey prediction. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2010, 224, 285–297. [Google Scholar] [CrossRef]
- Shimomura, N.; Fujimoto, K.; Oki, T.; Muro, H. An algorithm for distinguishing the types of objects on the road using laser radar and vision. IEEE Trans. Intell. Transp. Syst. 2002, 3, 189–195. [Google Scholar] [CrossRef]
- Schiffmann, J.K.; Widmann, G.R. Model-based scene tracking using radar sensors for intelligent automotive vehicle systems. In Proceedings of the Conference on Intelligent Transportation Systems, Boston, MA, USA, 12 November 1997; pp. 421–426. [Google Scholar]
- Schiffmann, J.K.; Widmann, G.R. Identification of in-lane vehicles using a scene tracking technique for intelligent automotive systems. Mob. Robot. XIII Intell. Transp. Syst. 1999, 3525, 338–349. [Google Scholar]
- He, L. Research on Forward Vehicle State Recognition Algorithm Based on Forward-Looking Radar. Master’s Thesis, Jilin University, Changchun, China, 2006. [Google Scholar]
- Miyahara, S. A Method for Radar-Based Target Tracking in Non-Uniform Road Condition; SAE Transactions: New York, NY, USA, 2003; pp. 1–9. [Google Scholar]
- Chen, X.W.; Liu, W.C.; Zhang, J.G.; Gang, L. Research on the key target distinguish method of automobile cruise system in the curve road. Mod. Manuf. Eng. 2017, 442, 80–84. [Google Scholar]
- Ma, G.C.; Liu, Z.D.; Pei, X.F.; Wang, B.F. Study on multi-object identification and compensation for on car rader. Trans. Beijing Inst. Technol. 2013, 33, 1135–1139. [Google Scholar]
- Peng, T.; Su, L.L.; Guan, Z.W.; Zhang, R. A safe lane-change model for vehicle emergent collision avoidance on curved section of highway. Automot. Eng. 2019, 41, 1013–1020. [Google Scholar]
- Yuan, C.C.; Li, D.Y.; Wu, F.; Liu, Y.; Zhang, L. Vehicle longitudinal active collision avoidance DRV safety distance model. J. Chongqing Univ. Technol. (Nat. Sci.) 2016, 30, 15–19. [Google Scholar]
- Pei, X.F.; Qi, Z.Q.; Wang, B.F.; Liu, Z. Vehicle frontal collision warning/avoidance strategy. J. Jilin Univ. (Eng. Technol. Ed.) 2014, 44, 599–604. [Google Scholar]
- Li, L.; Zhu, X.C.; Dong, X.F.; Ma, Z.X. Research on the collision avoidance strategy for autonomous emergency braking system. Automot. Eng. 2015, 37, 168–174. [Google Scholar]
- Bae, J.J.; Lee, M.S.; Kang, N. Partial and Full Braking Algorithm According to Time-to-Collision for Both Safety and Ride Comfort in an Autonomous Vehicle. Int. J. Automot. Technol. 2020, 21, 351–360. [Google Scholar] [CrossRef]
- Li, Z.; Ahn, S.; Chung, K.; Ragland, D.R.; Wang, W.; Yu, J.W. Surrogate safety measure for evaluating rear-end collision risk related to kinematic waves near freeway recurrent bottlenecks. Accid. Anal. Prev. 2014, 64, 52–61. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Abdel-Aty, M.; Xiang, Q.J.; Cai, Q.; Yuan, J.H. Utilizing UAV video data for in-depth analysis of drivers’ crash risk at interchange merging areas. Accid. Anal. Prev. 2019, 123, 159–169. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.; Ran, B.; Qu, X.; Zhang, J.; Lin, Y. Cooperative Lane Changing Strategies to Improve Traffic Operation and Safety Nearby Freeway Off-Ramps in a Connected and Automated Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4605–4614. [Google Scholar] [CrossRef]
- Yang, X.X.; Zou, Y.J.; Chen, L. Operation analysis of freeway mixed traffic flow based on catch-up coordination platoon. Accid. Anal. Prev. 2022, 175, 106780. [Google Scholar] [CrossRef]
- Zhen, Y.J. Research on AEB Control Strategy Considering Road Curvature and Adhesion. Master’s Thesis, Chang’an University, Xi’an, China, 2022. [Google Scholar]
- Xia, H. Research on AEB System Strategy Based on Curve Traffic Accident. Master’s Thesis, Chongqing University of Technology, Chongqing, China, 2022. [Google Scholar]
- Wu, Y.H. Research on the Control Strategy of AEB System of Coaches under Curved Road Conditions. Master’s Thesis, Xiamen University of Technology, Xiamen, China, 2021. [Google Scholar]
- Xin, J.G.; Yang, F.Y.; Zhang, B.D.; Zhang, X. AEB control strategy of electric vehicle based on fusion algorithm. J. Beijing Jiaotong Univ. 2021, 45, 77–86+93. [Google Scholar]
- Zhang, S.L.; Deng, G.H.; Xv, Z.; Ou, J. Research on hierarchical control of vehicle automatic emergency braking system under curve condition. J. Chongqing Univ. Technol. (Nat. Sci.) 2021, 35, 85–93. [Google Scholar]
- Huang, Q.; Miller, R.; Mc Neille, P.; Roman, G. Development of a peer-to-peer collision warning system. Ford Techincal J. 2002, 5, 1–2. [Google Scholar]
- Zhang, Y.; Antonsson, E.K.; Grote, K. A new threat assessment measure for collision avoidance systems. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 968–975. [Google Scholar]
- Lan, F.C.; Yu, M.; Li, S.C.; Chen, J.Q. Research on hierarchical control strategy for automatic emergency braking system with consideration of time-to-collision. Automot. Eng. 2020, 42, 206–214. [Google Scholar]
- Li, J.J. Research on Automatic Emergency Control Strategy of Brake-by-Wire under Real-Time Operating Conditions. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2022. [Google Scholar]
Figure 1.
Radar data coordinate conversion.
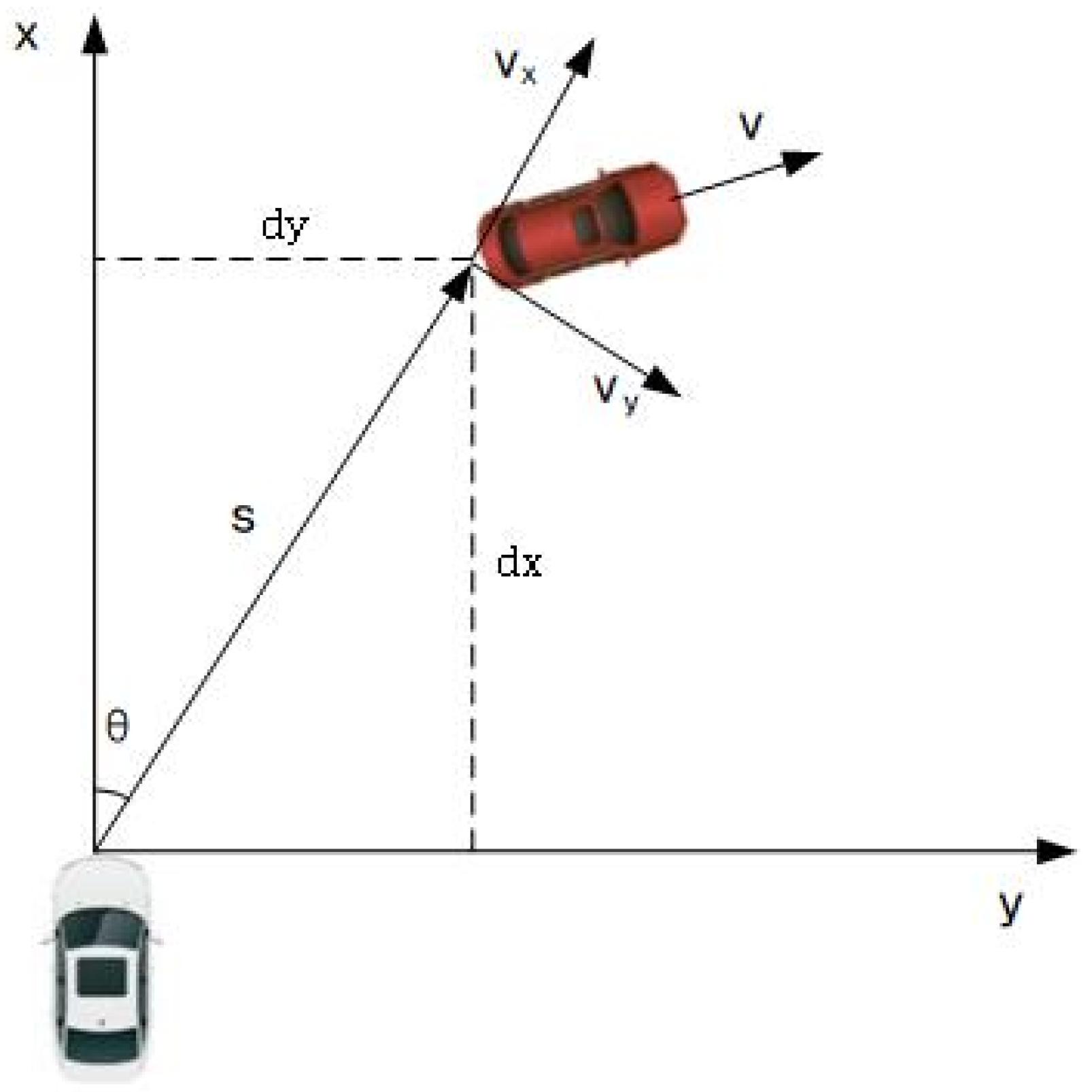
Figure 2.
Uniform circular motion of the vehicle.
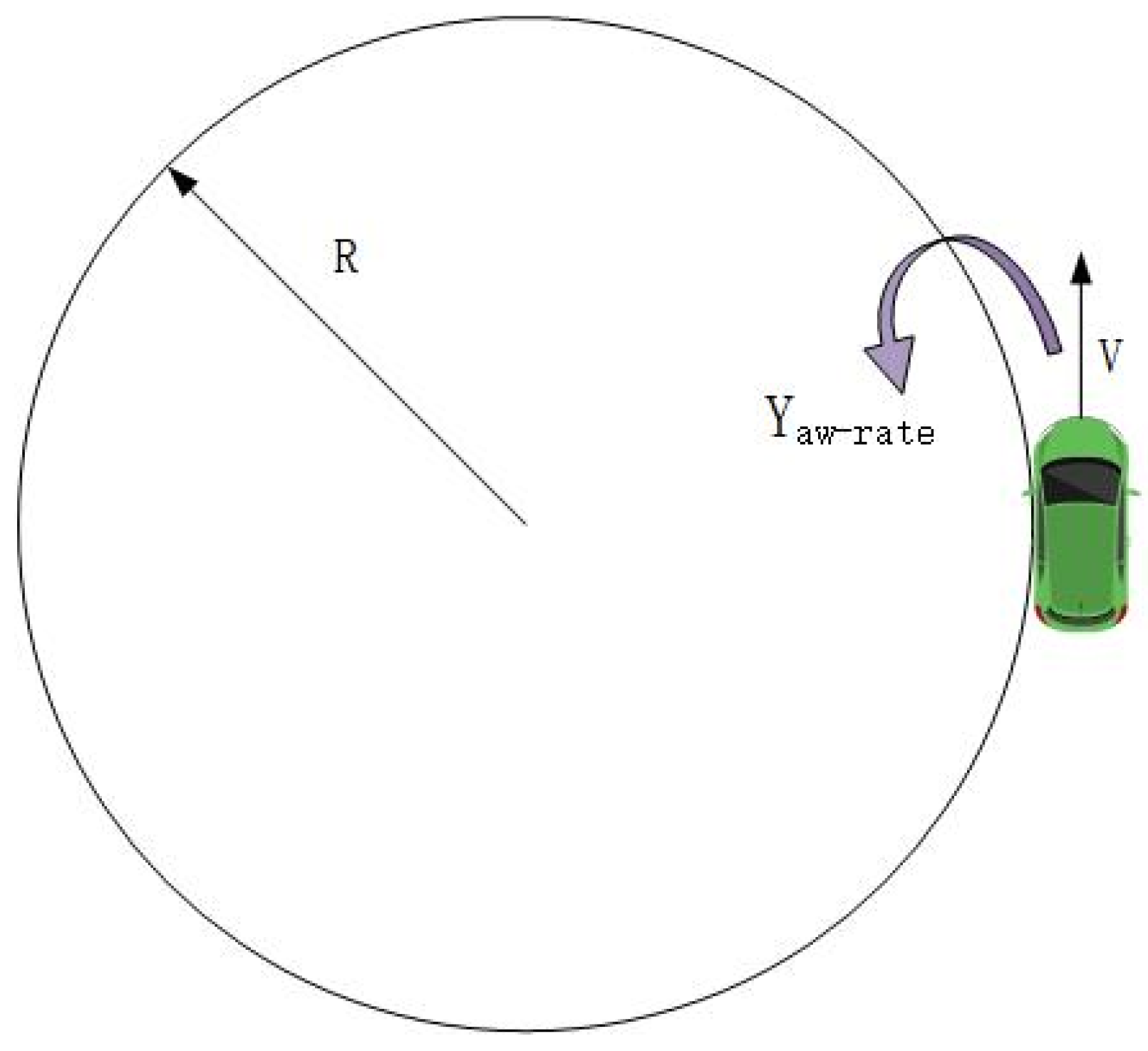
Figure 3.
Curve target position compensation.
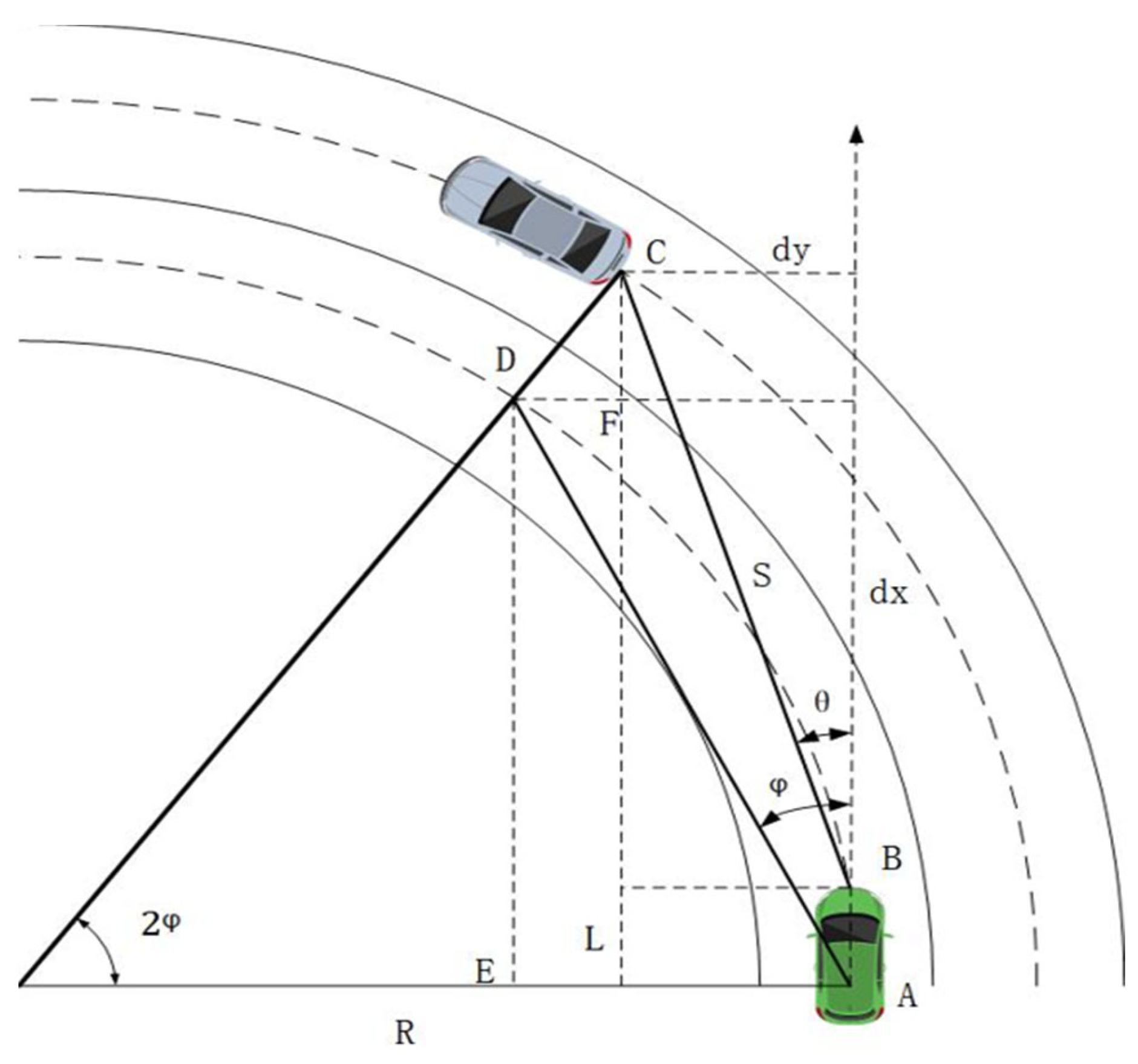
Figure 4.
Curve target position compensation for short distances.
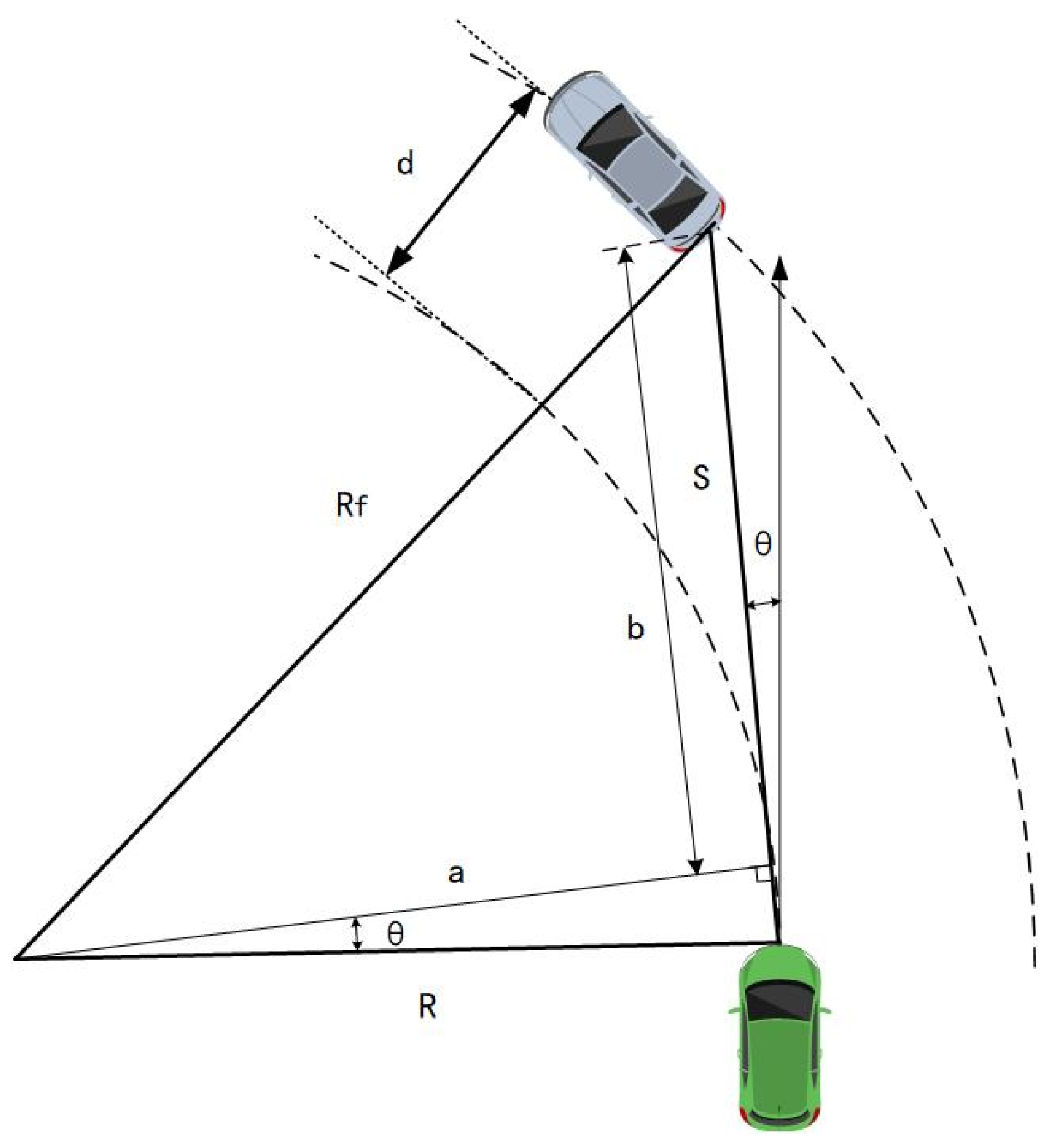
Figure 5.
Vehicles traveling on curved roads.
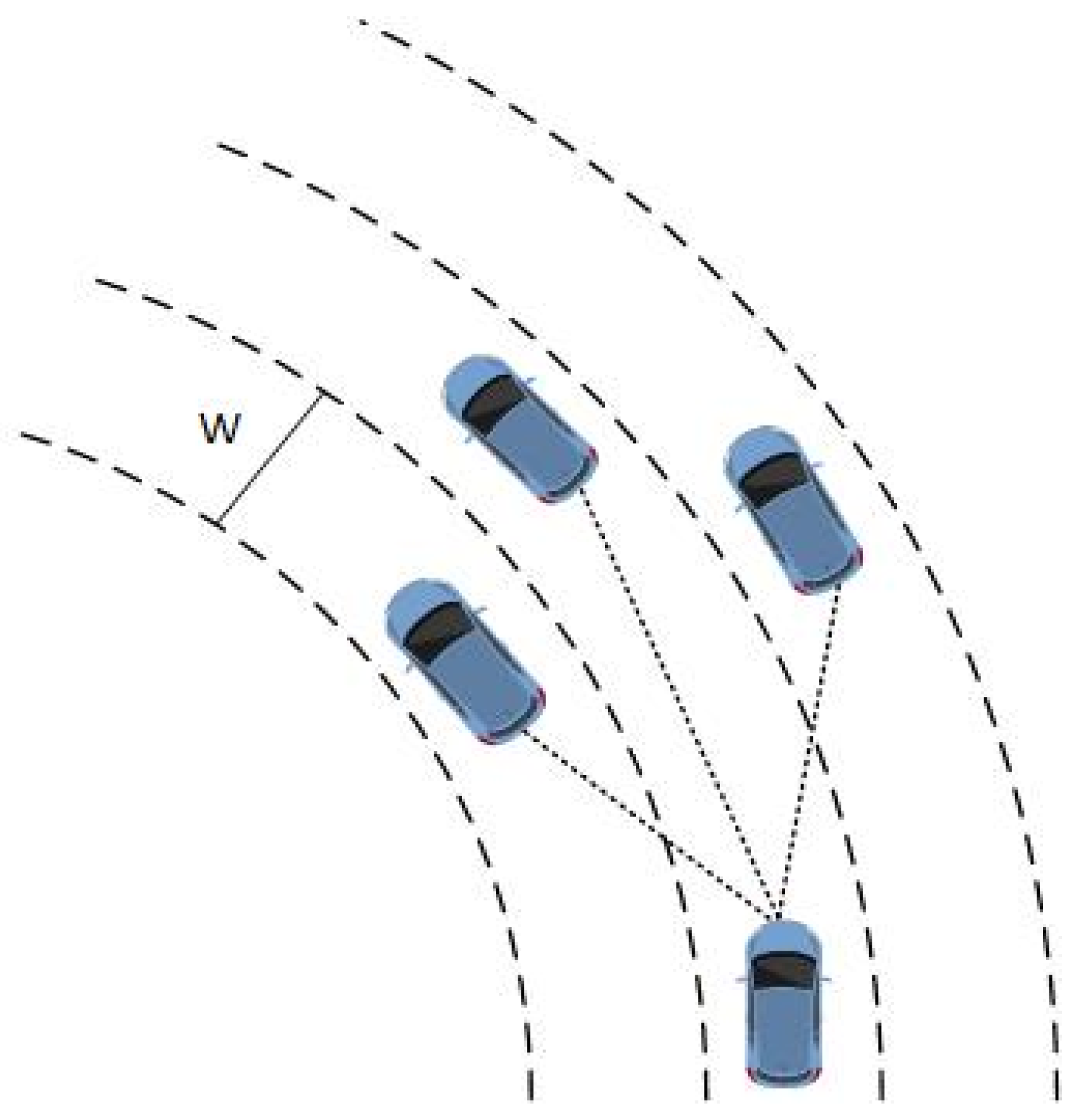
Figure 6.
Actual distances on curved roads.
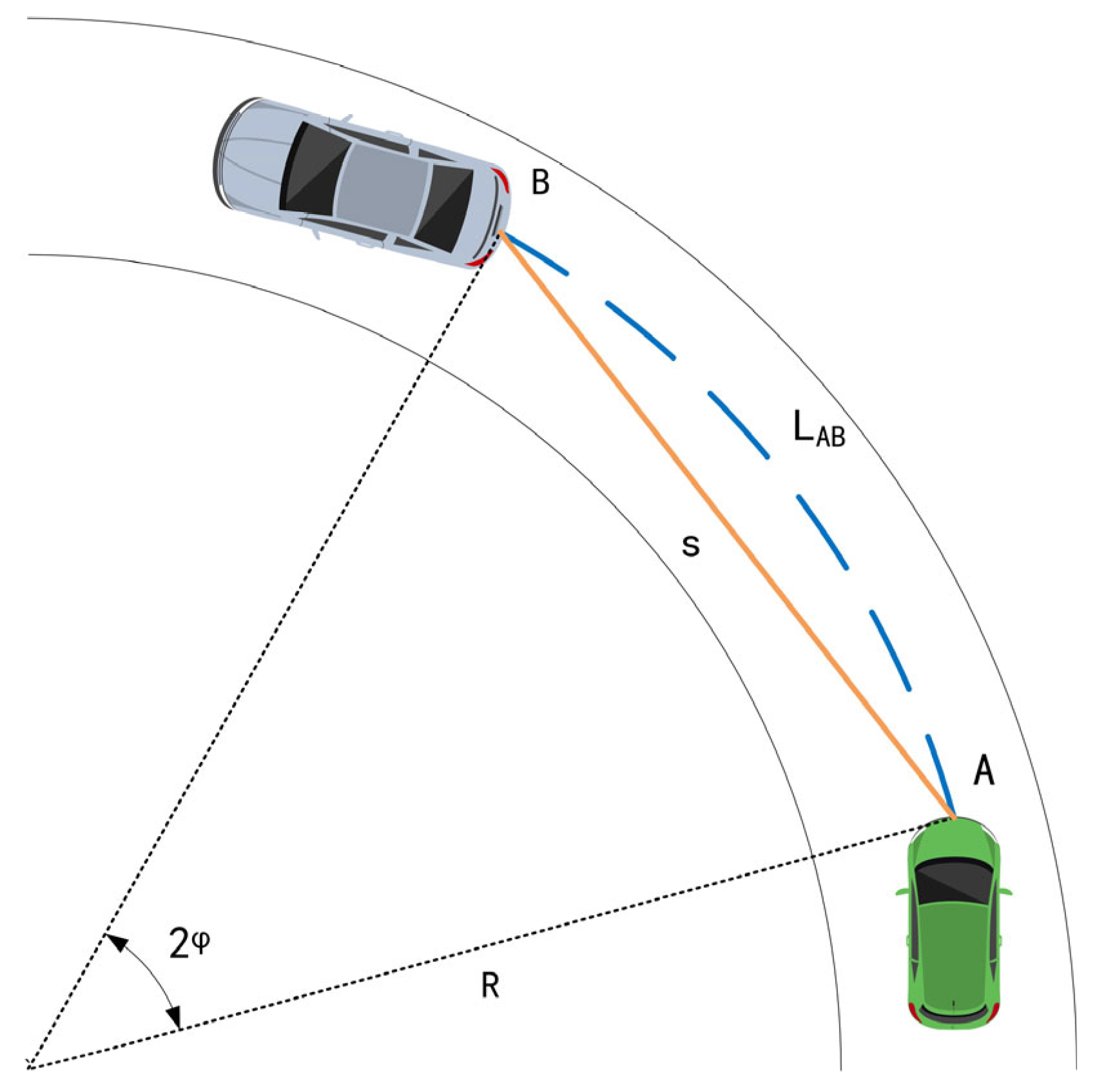
Figure 7.
Safe distance model.
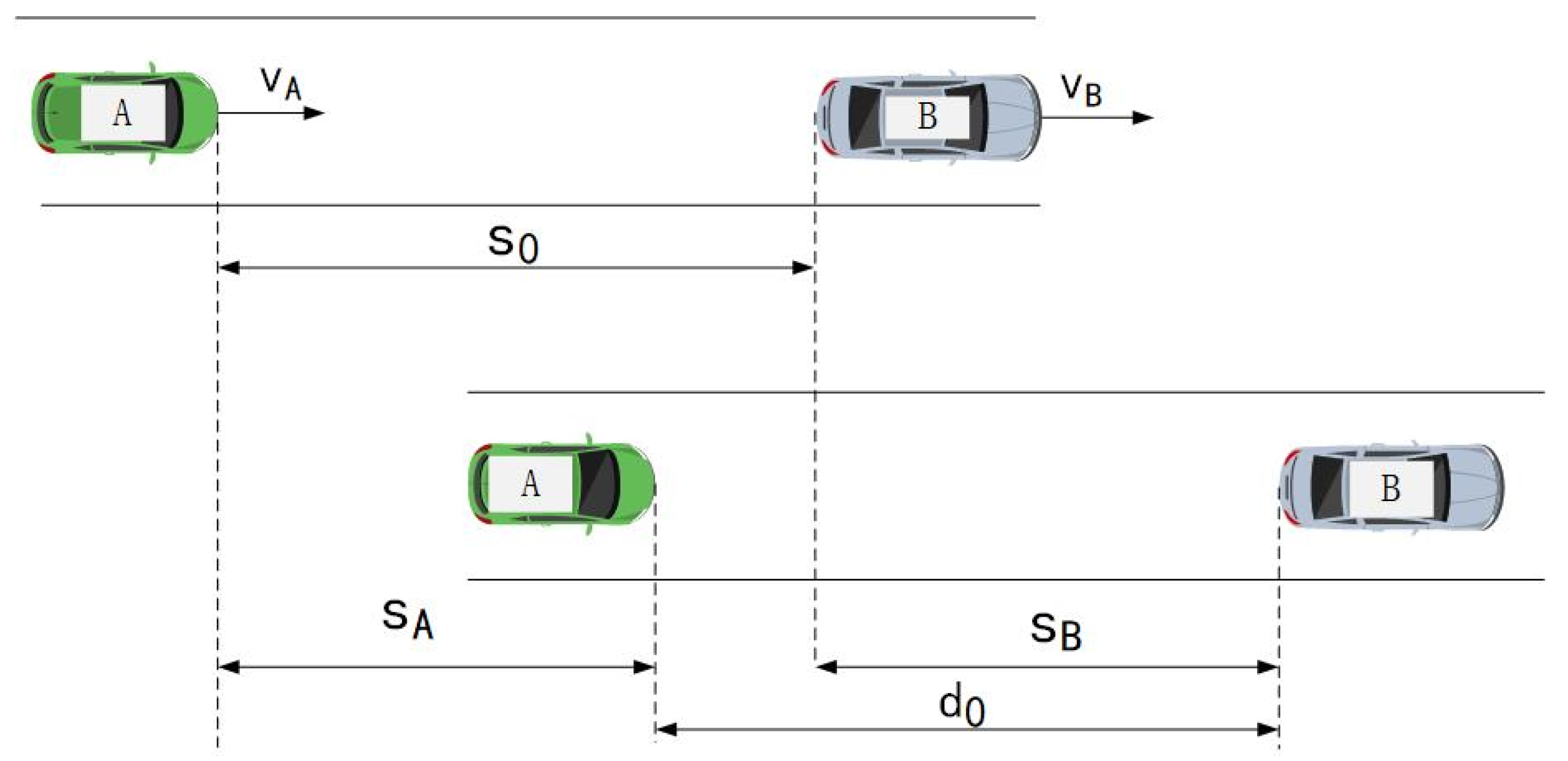
Figure 8.
The overall control process.
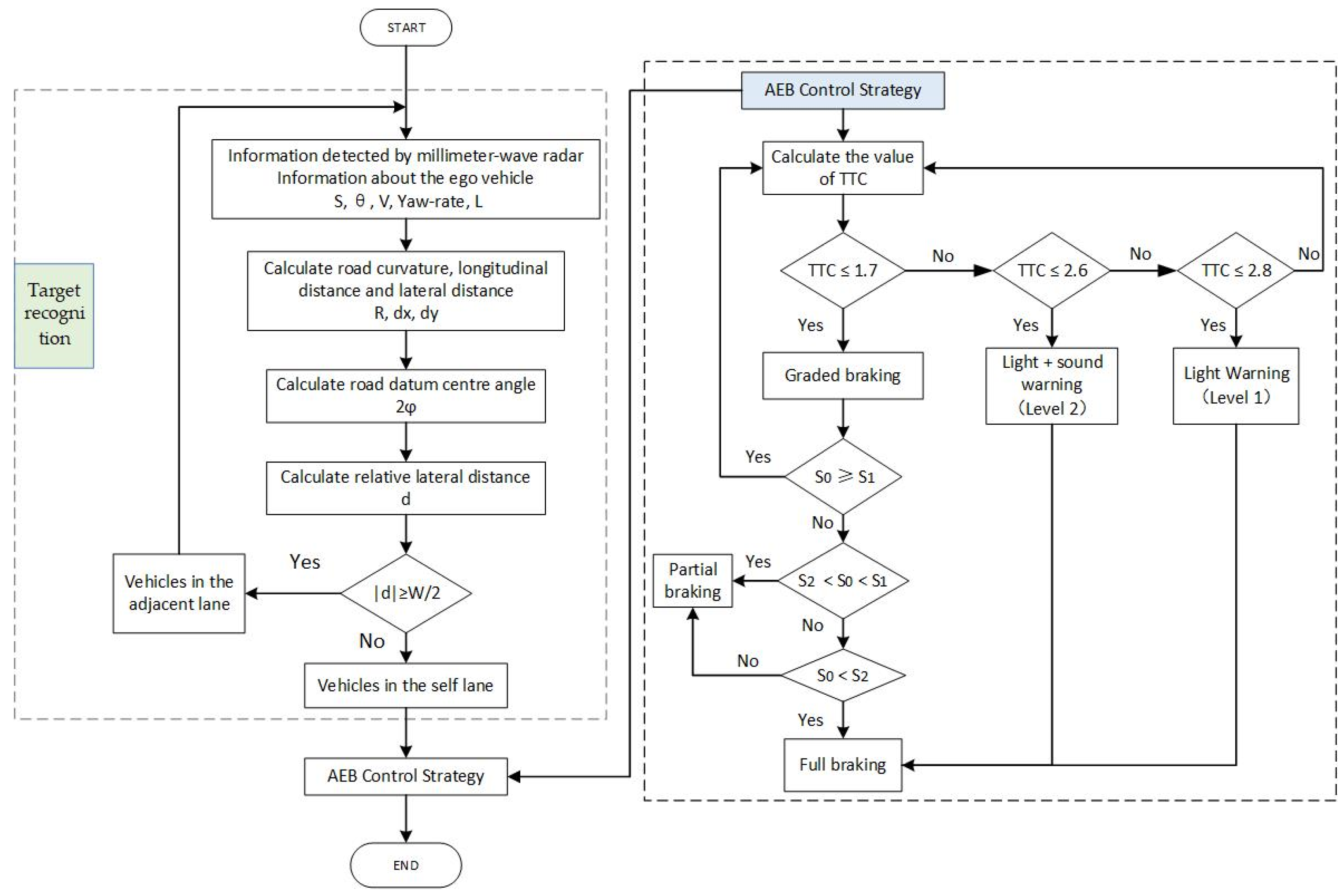
Figure 9.
Driving environment.
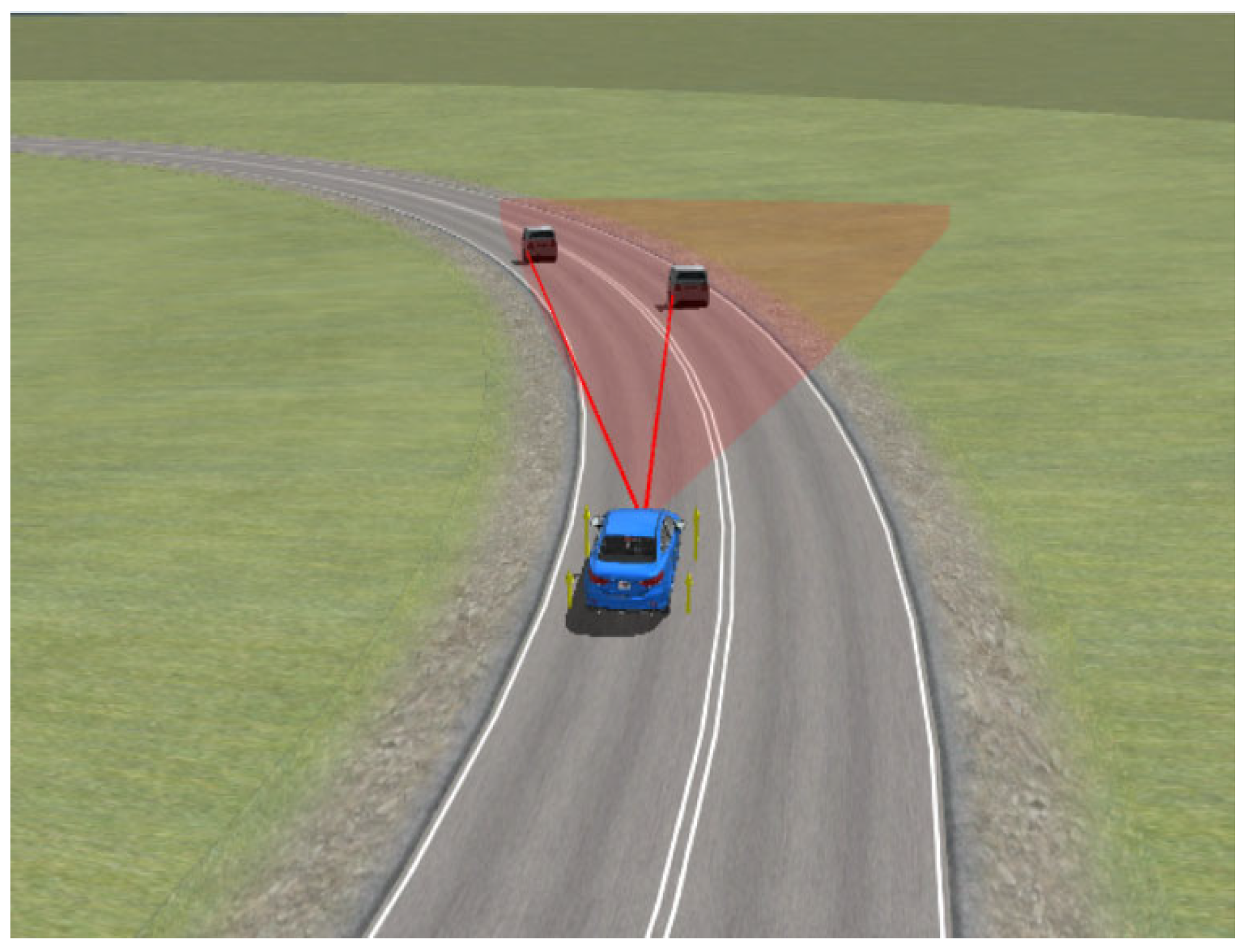
Figure 10.
Comparison of target recognition methods.
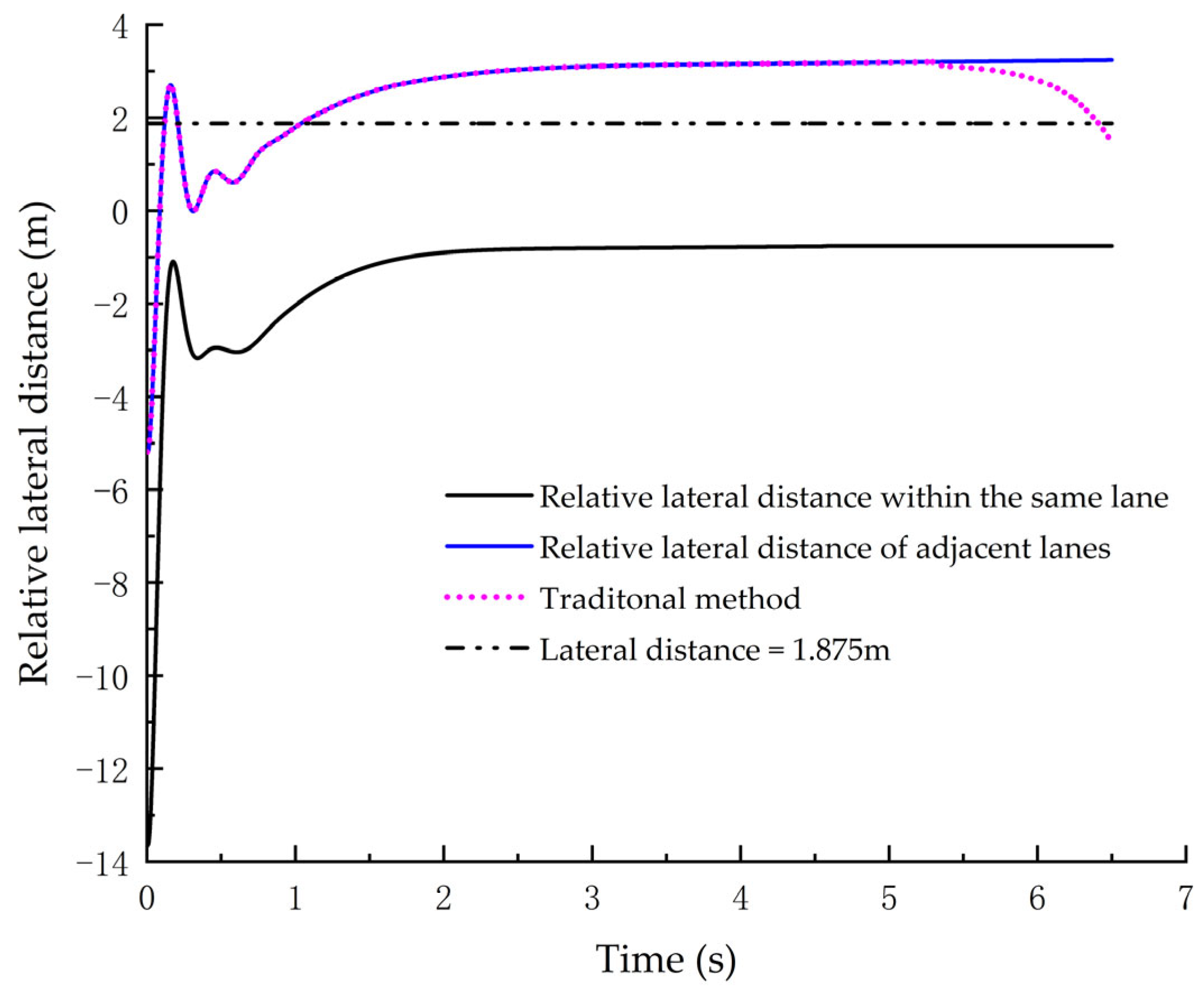
Figure 11.
The TTC model validation: (a) CCRs; (b) CCRm; (c) CCRb.

Figure 12.
Simulation results of CCRs: (a) CCRs_2 relative lateral distance; (b) level of warning; (c) the ego vehicle speed; (d) relative distance; (e) braking forces.
Figure 12.
Simulation results of CCRs: (a) CCRs_2 relative lateral distance; (b) level of warning; (c) the ego vehicle speed; (d) relative distance; (e) braking forces.

Figure 13.
Simulation results of CCRm: (a) CCRm_3 relative lateral distance; (b) level of warning; (c) the ego vehicle speed; (d) relative distance; (e) relative speed; (f) braking forces.
Figure 13.
Simulation results of CCRm: (a) CCRm_3 relative lateral distance; (b) level of warning; (c) the ego vehicle speed; (d) relative distance; (e) relative speed; (f) braking forces.

Figure 14.
Simulation results of CCRb: (a) relative lateral distance; (b) level of warning; (c) the ego vehicle speed; (d) relative distance; (e) braking force.
Figure 14.
Simulation results of CCRb: (a) relative lateral distance; (b) level of warning; (c) the ego vehicle speed; (d) relative distance; (e) braking force.
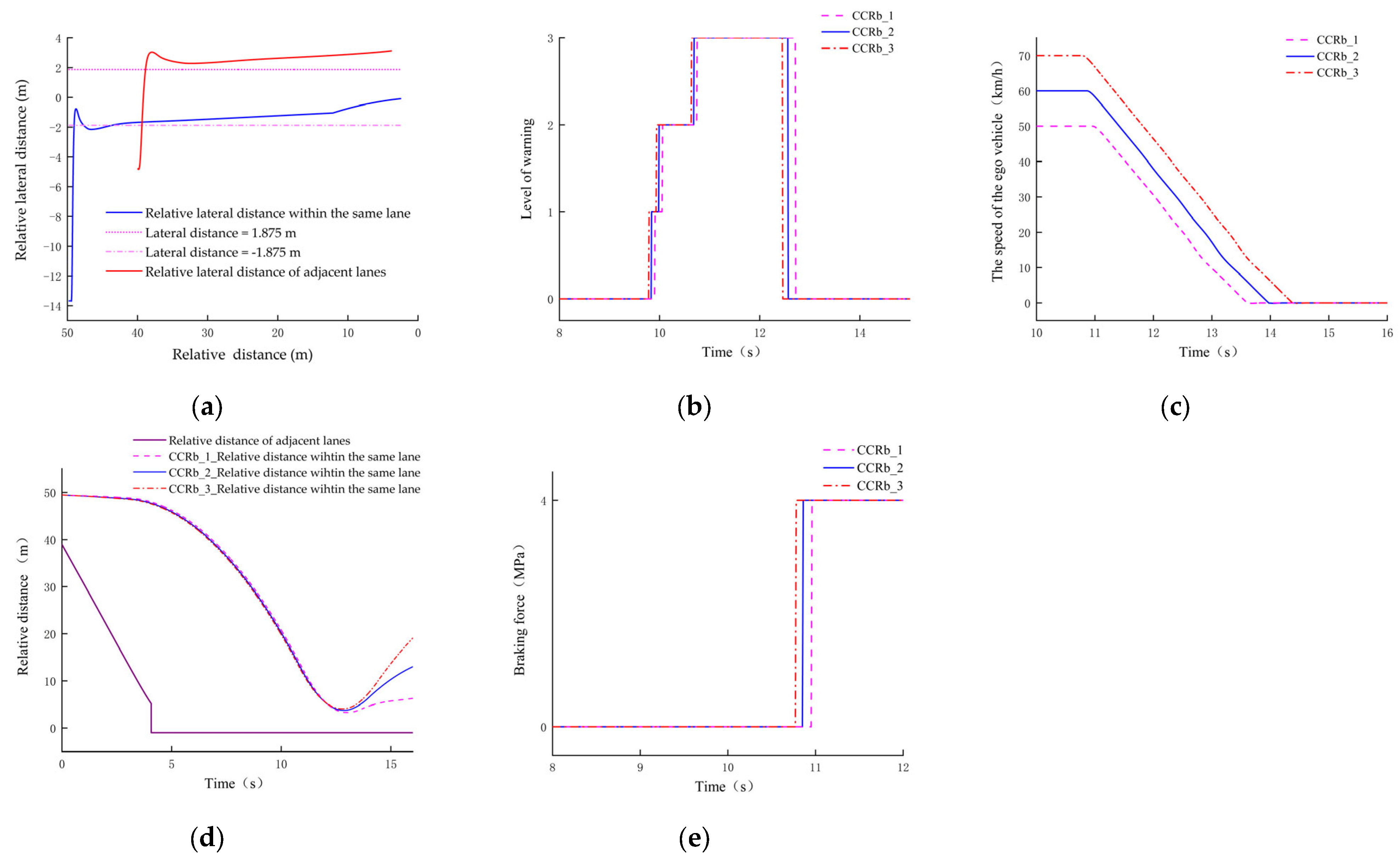
Table 1.
Probability of collision avoidance for different braking intensities and different crash time thresholds.
Table 1.
Probability of collision avoidance for different braking intensities and different crash time thresholds.
| Braking Intensity (g) | Probability of Collision Avoidance at Different Times | Average Value (s) | |||
|---|---|---|---|---|---|
| 5% | 25% | 75% | 95% | ||
| 0.5 | 0.2 | 0.6 | 1.5 | 1.8 | 1.15 |
| 0.675 | 0.15 | 0.5 | 1.1 | 1.5 | 0.8 |
| 0.85 | 0.1 | 0.4 | 0.85 | 1.2 | 0.6 |
Table 2.
Driver reaction time in accidents.
| Types of Warning | Average Value (s) | Standard Deviation | 75% | 85% | 90% | ||
|---|---|---|---|---|---|---|---|
| light | 1.13 | 0.52 | 1.03 | 0.44 | 1.38 | 1.62 | 1.8 |
| sound | 0.99 | 0.44 | 0.90 | 0.43 | 1.20 | 1.40 | 1.55 |
| light + sound | 0.90 | 0.34 | 0.84 | 0.37 | 1.08 | 1.23 | 1.35 |
Table 3.
Safe distance algorithms under different working conditions.
| Working Conditions | Minimum Safe Distance between Two Vehicles S0(m) |
|---|---|
| CCRs: The preceding vehicle is in a stationary state. | |
| CCRm: The preceding vehicle is moving at a constant speed. | |
| CCRb: The preceding vehicle is braking. |
where denotes the braking gap time; denotes the time of the braking force increase; vr denotes the relative velocity of the two vehicles; VA denotes the speed of the ego vehicle; VB denotes the speed of the preceding vehicle; aAmax denotes the maximum acceleration of the ego vehicle; ab denotes the deceleration of the preceding vehicle; and d0 denotes the minimum relative distance.
Table 4.
Average brake intensity in crashes.
| Distribution of Accidents | Interval 1 | Interval 2 | Interval 3 | Interval 4 | Average Value |
|---|---|---|---|---|---|
| ratio | 15% | 30% | 40% | 15% | |
| deceleration at level 1 (g) | −0.19 | −0.34 | −0.50 | −0.61 | 0.41 |
| deceleration at level 2 (g) | −0.42 | −0.66 | −0.82 | −0.94 | 0.71 |
Table 5.
The AEB test conditions.
| Test Conditions | Test Number | The Ego Vehicle Speed (km/h) | Speed of the Preceding Vehicle (km/h) | Initial Distance to the Preceding Vehicle (m) | Deceleration (m/s2) |
|---|---|---|---|---|---|
| CCRs | CCRs_1 | 50 | 0 | 50 | 0 |
| CCRs_2 | 60 | 0 | 50 | 0 | |
| CCRs_3 | 80 | 0 | 50 | 0 | |
| CCRm | CCRm_1 | 60 | 20 | 50 | 0 |
| CCRm_2 | 70 | 20 | 50 | 0 | |
| CCRm_3 | 80 | 20 | 50 | 0 | |
| CCRb | CCRs_1 | 50 | 50 | 50 | 4 |
| CCRs_2 | 60 | 60 | 50 | 4 | |
| CCRs_3 | 70 | 70 | 50 | 4 |
Table 6.
Overall simulation results.
| Test Number | Effectiveness of Target Recognition on Curved Roads | Effects of Collision Avoidance | Minimum Relative Distance (m) |
|---|---|---|---|
| CCRs_1 | Effective recognition | Avoid collision | 2.74 |
| CCRs_2 | Effective recognition | Avoid collision | 2.31 |
| CCRs_3 | Effective recognition | Avoid collision | 3.42 |
| CCRm_1 | Effective recognition | Avoid collision | 3.34 |
| CCRm_2 | Effective recognition | Avoid collision | 2.93 |
| CCRm_3 | Effective recognition | Avoid collision | 3.02 |
| CCRb_1 | Effective recognition | Avoid collision | 3.28 |
| CCRb_2 | Effective recognition | Avoid collision | 3.66 |
| CCRb_3 | Effective recognition | Avoid collision | 4.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, L.; Yu, Z.; Xu, X.; Yan, Y. Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road. Electronics 2023, 12, 3490. https://doi.org/10.3390/electronics12163490
AMA Style
Zhang L, Yu Z, Xu X, Yan Y. Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road. Electronics. 2023; 12(16):3490. https://doi.org/10.3390/electronics12163490
Chicago/Turabian StyleZhang, Lin, Zhidong Yu, Xiaowei Xu, and Yunbing Yan. 2023. "Research on Automatic Emergency Braking System Based on Target Recognition and Fusion Control Strategy in Curved Road" Electronics 12, no. 16: 3490. https://doi.org/10.3390/electronics12163490
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.