
Integration of Wearables and Wireless Technologies to Improve the Interaction between Disabled Vulnerable Road Users and Self-Driving Cars



Abstract
:1. Introduction
2. Related Work
Vehicular Communication
3. Materials and Methods
3.1. Scenario Description
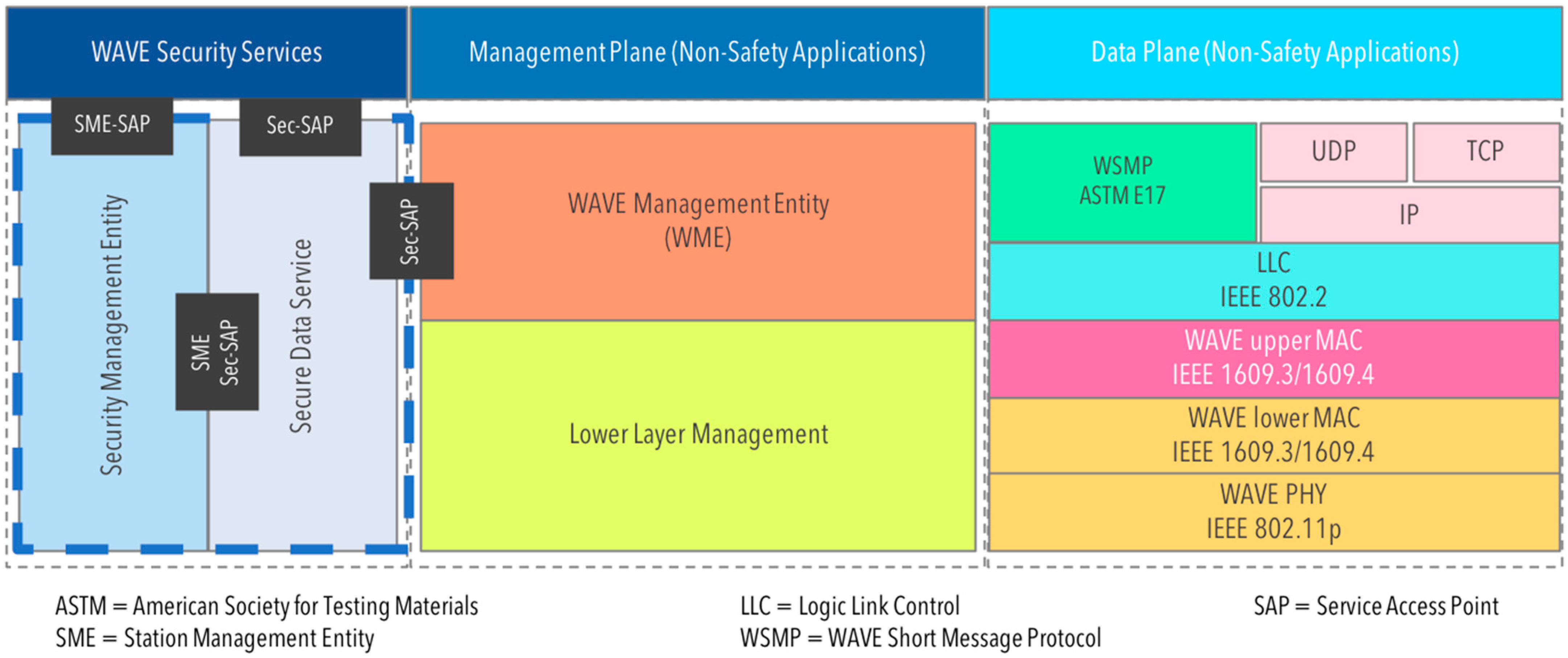
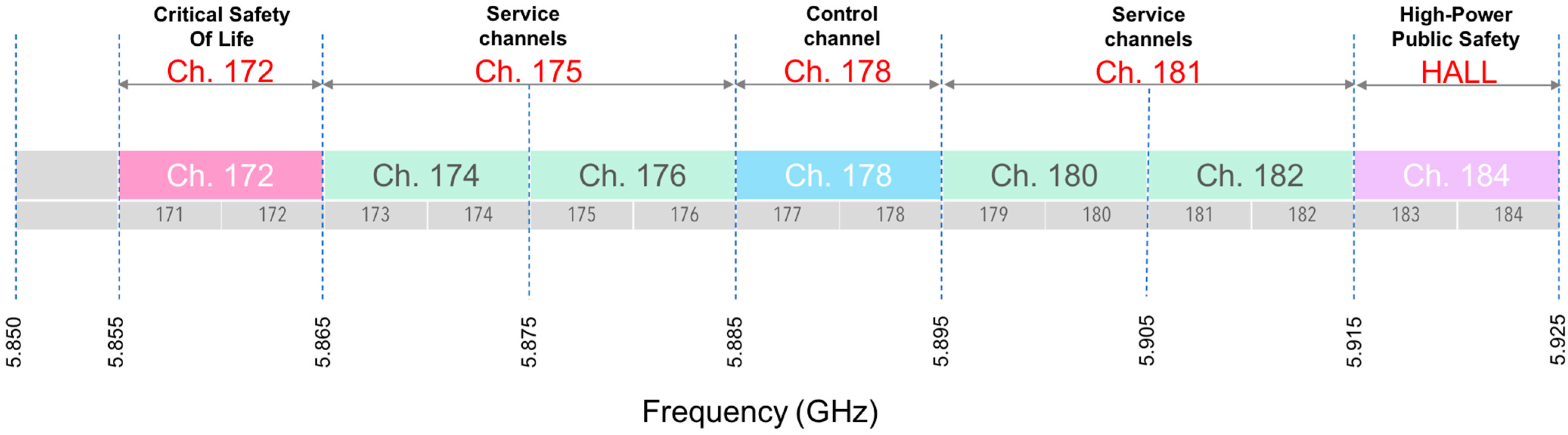
3.2. Technical Background
3.3. Description of the Proposal
3.3.1. Global Architecture
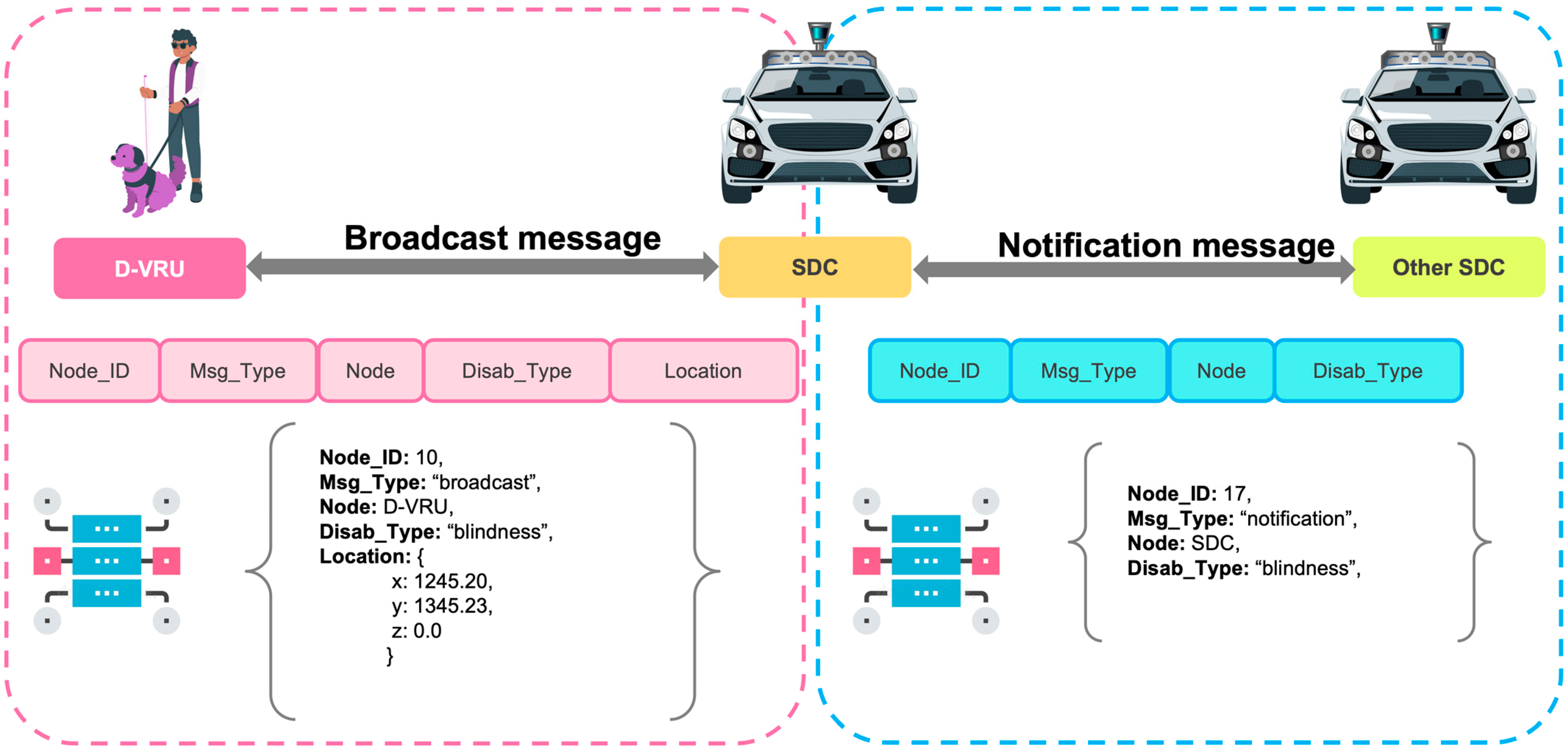
3.3.2. Message Format
4. Evaluation of the Proposal
4.1. Global Evaluation Scenario
4.2. Simulation Scenario Description
4.2.1. Network Simulation
4.2.2. Traffic Microsimulation
4.2.3. Bidirectionally Coupled Simulation
4.2.4. Common Interfaces
4.2.5. Scenario Map
4.3. Simulation Parameters
Detection and Stopping Algorithm
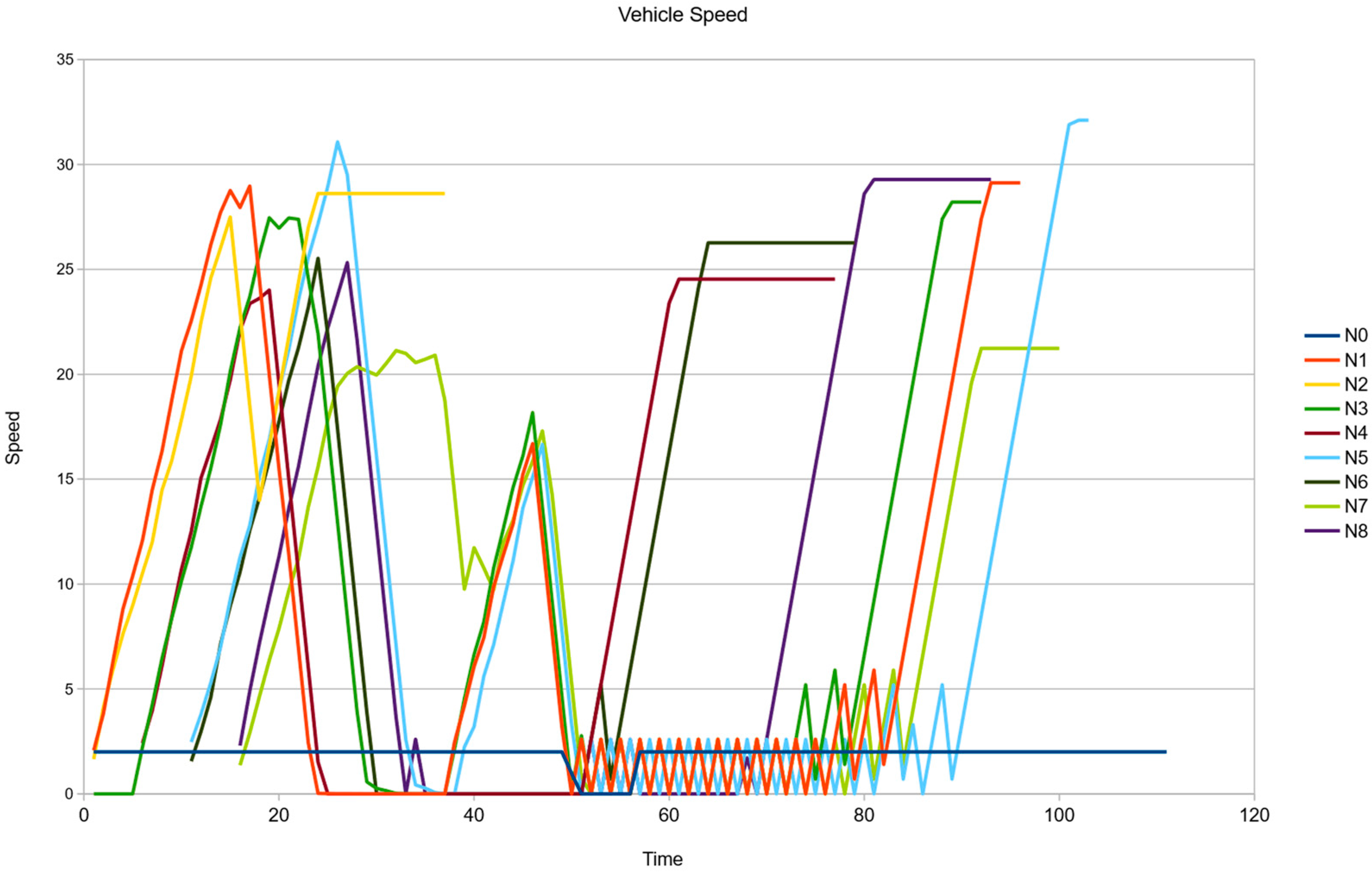
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Society of Automotive Engineers. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. 2014. Available online: https://www.sae.org/standards/content/j3016_202104/ (accessed on 22 August 2023).
- NHTSA. Automated Vehicle for Safety; National Highway Traffic Safety Administration: Washington, DC, USA, 2021. Available online: https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety (accessed on 22 August 2023).
- NHTSA. Vehicle Manufactures, Automated Driving Systems; National Highway Traffic Safety Administration: Washington, DC, USA, 2021. Available online: https://www.nhtsa.gov/vehicle-manufacturers/automated-driving-systems (accessed on 22 August 2023).
- NHTSA. Comparing Demographic Trends in Vulnerable Road User Fatalities and the U.S. Population, 1980–2019; National Highway Traffic Safety Administration: Washington, DC, USA, 2021; pp. 1–11.
- European Commission. ITS & Vulnerable Road Users. 2015. Available online: https://transport.ec.europa.eu/transport-themes/intelligent-transport-systems/road/action-plan-and-directive/its-vulnerable-road-users_en (accessed on 22 August 2023).
- Reyes-Muñoz, A.; Guerrero-Ibáñez, J. Vulnerable Road Users and Connected Autonomous Vehicles Interaction: A Survey. Sensors 2022, 22, 4614. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Global Status Report on Road Safety 2018. Available online: https://www.who.int/publications-detail-redirect/9789241565684 (accessed on 13 February 2023).
- World Health Organization. Disability. 2 December 2022. Available online: https://www.who.int/news-room/fact-sheets/detail/disability-and-health (accessed on 3 February 2023).
- World Health Organization. Deafness and Hearing Loss. Available online: https://www.who.int/news-room/fact-sheets/detail/deafness-and-hearing-loss (accessed on 9 March 2023).
- Wu, T.-E.; Tsai, C.-C.; Guo, J.-I. LiDAR/camera sensor fusion technology for pedestrian detection. In Proceedings of the 2017 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Kuala Lumpur, Malaysia, 12–15 December 2017; pp. 1675–1678. [Google Scholar] [CrossRef]
- Lin, B.-Z.; Lin, C.-C. Pedestrian detection by fusing 3D points and color images. In Proceedings of the 2016 IEEE/ACIS 15th International Conference on Computer and Information Science (ICIS), Okayama, Japan, 26–29 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Lovas, T.; Barsi, Á. Pedestrian detection by profile laser scanning. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 408–412. [Google Scholar] [CrossRef]
- Kim, J. Pedestrian Detection and Distance Estimation Using Thermal Camera in Night Time. In Proceedings of the 2019 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Okinawa, Japan, 11–13 February 2019; pp. 463–466. [Google Scholar] [CrossRef]
- Bila, C.; Sivrikaya, F.; Khan, M.A.; Albayrak, S. Vehicles of the Future: A Survey of Research on Safety Issues. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1046–1065. [Google Scholar] [CrossRef]
- Gu, F.; Niu, J.; Jiang, L.; Liu, X.; Hancke, G.P. SafePath: Exploiting Ubiquitous Smartphones to Avoid Vehicle–Pedestrian Collision. IEEE Internet Things J. 2022, 9, 6763–6777. [Google Scholar] [CrossRef]
- Napolitano, A.; Cecchetti, G.; Giannone, F.; Ruscelli, A.L.; Civerchia, F.; Kondepu, K.; Valcarenghi, L.; Castoldi, P. Implementation of a MEC-based Vulnerable Road User Warning System. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Fan, Y.; Liang, Q. An Improved Method for Detection of the Pedestrian Flow Based on RFID. In Proceedings of the 2017 IEEE International Conference on Computational Science and Engineering (CSE) and IEEE International Conference on Embedded and Ubiquitous Computing (EUC), Guangzhou, China, 21–24 July 2017; pp. 69–72. [Google Scholar] [CrossRef]
- Llorca, D.F.; Quintero, R.; Parra, I.; Izquierdo, R.; Fernández, C.; Sotelo, M.A. Assistive Pedestrian Crossings by Means of Stereo Localization and RFID Anonymous Disability Identification. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1357–1362. [Google Scholar] [CrossRef]
- ATiA. What is AT? Assistive Technology Industry Association: Chicago, IL, USA, 2015; Available online: https://www.atia.org/home/at-resources/what-is-at/ (accessed on 19 November 2022).
- Cao, J.; Pang, Y.; Xie, J.; Khan, F.S.; Shao, L. From Handcrafted to Deep Features for Pedestrian Detection: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 4913–4934. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; He, Z.; Zhang, S.; Liang, D. Robust pedestrian detection in thermal infrared imagery using a shape distribution histogram feature and modified sparse representation classification. Pattern Recognit. 2015, 48, 1947–1960. [Google Scholar] [CrossRef]
- Cheng, Y.; Su, S.Z.; Li, S.Z. Combine histogram intersection kernel with linear kernel for pedestrian classification. In Proceedings of the IET International Conference on Information Science and Control Engineering 2012 (ICISCE 2012), Shenzhen, China, 7–9 December 2012; pp. 1–3. [Google Scholar] [CrossRef]
- Mao, L.; Tang, L. Pedestrian Detection Based on Gradient Direction Histogram. In Proceedings of the 2022 IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2022; pp. 939–943. [Google Scholar] [CrossRef]
- Liu, T.; Cheng, J.; Yang, M.; Du, X.; Luo, X.; Zhang, L. Pedestrian detection method based on self-learning. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 2161–2165. [Google Scholar] [CrossRef]
- Ahmed, Z.; Iniyavan, R.; Madhan Mohan, P. Enhanced Vulnerable Pedestrian Detection using Deep Learning. In Proceedings of the 2019 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 4–6 April 2019; pp. 971–974. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, C.; Wang, B. Pedestrian Detection Based on Improved SSD Object Detection Algorithm. In Proceedings of the 2022 International Conference on Networking and Network Applications (NaNA), Urumqi, China, 3–5 December 2022; pp. 550–555. [Google Scholar] [CrossRef]
- Abbass, M.Y.; Kwon, K.-C.; Kim, N.; Abdelwahab, S.A.; Abd El-Samie, F.E.; Khalaf, A.A.M. Utilization of deep convolutional and handcrafted features for object tracking. Optik 2020, 218, 164926. [Google Scholar] [CrossRef]
- Tesema, F.B.; Wu, H.; Chen, M.; Lin, J.; Zhu, W.; Huang, K. Hybrid channel based pedestrian detection. Neurocomputing 2020, 389, 1–8. [Google Scholar] [CrossRef]
- Trichet, R.; Bremond, F. LBP Channels for Pedestrian Detection. In Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision (WACV), Lake Tahoe, NV, USA, 12–15 March 2018; pp. 1066–1074. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, X. Human detection and object tracking based on Histograms of Oriented Gradients. In Proceedings of the 2013 Ninth International Conference on Natural Computation (ICNC), Shenyang, China, 23–25 July 2013; pp. 1349–1353. [Google Scholar] [CrossRef]
- Surasak, T.; Takahiro, I.; Cheng, C.; Wang, C.; Sheng, P. Histogram of oriented gradients for human detection in video. In Proceedings of the 2018 5th International Conference on Business and Industrial Research (ICBIR), Bangkok, Thailand, 17–18 May 2018; pp. 172–176. [Google Scholar] [CrossRef]
- Sangeetha, D.; Deepa, P. Efficient Scale Invariant Human Detection Using Histogram of Oriented Gradients for IoT Services. In Proceedings of the 2017 30th International Conference on VLSI Design and 2017 16th International Conference on Embedded Systems (VLSID), Hyderabad, India, 7–11 January 2017; pp. 61–66. [Google Scholar] [CrossRef]
- Zhang, C.; Dai, B.; Jiang, H.; Shen, X.; Yao, Y. A moving target detection algorithm based on BING objectness and background estimation. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 10795–10800. [Google Scholar] [CrossRef]
- Chen, J.; Mei, F.; Ye, W.; Wang, H.; Shen, X.; Yao, Y. Fast algorithm for moving target detection. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 11217–11222. [Google Scholar] [CrossRef]
- Huang, L.; Ma, X.; Fang, F.; Zhou, B. Device Target Checking for Power Patrol Robot Based on Objectness Estimation. In Proceedings of the 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; pp. 73–78. [Google Scholar] [CrossRef]
- Nabati, R.; Qi, H. RRPN: Radar Region Proposal Network for Object Detection in Autonomous Vehicles. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 3093–3097. [Google Scholar] [CrossRef]
- Lin, J.-A.; Chiu, C.-T.; Cheng, Y.-Y. Object Detection with Color and Depth Images with Multi-Reduced Region Proposal Network and Multi-Pooling. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 1618–1622. [Google Scholar] [CrossRef]
- Lei, J.; Chen, Y.; Peng, B.; Huang, Q.; Ling, N.; Hou, C. Multi-Stream Region Proposal Network for Pedestrian Detection. In Proceedings of the 2018 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), San Diego, CA, USA, 23–27 July 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, X. Research on Pedestrian Detection System based on Tripartite Fusion of ‘HOG+SVM+Median filter’. In Proceedings of the 2020 International Conference on Artificial Intelligence and Computer Engineering (ICAICE), Beijing, China, 6–8 November 2020; pp. 484–488. [Google Scholar] [CrossRef]
- Ma, N.; Chen, L.; Hu, J.; Shang, Q.; Li, J.; Zhang, G. Pedestrian Detection Based on HOG Features and SVM Realizes Vehicle-Human-Environment Interaction. In Proceedings of the 2019 15th International Conference on Computational Intelligence and Security (CIS), Macau, China, 13–16 December 2019; pp. 287–291. [Google Scholar] [CrossRef]
- Zhang, M.; Jin, J.S.; Wang, M.; Tang, B.; Zheng, Y. Pedestrian intrusion detection based on improved GMM and SVM. In Proceedings of the 2016 13th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 16–18 December 2016; pp. 311–315. [Google Scholar] [CrossRef]
- Chong, P.; Tay, Y.H. A novel pedestrian detection and tracking with boosted HOG classifiers and Kalman filter. In Proceedings of the 2016 IEEE Student Conference on Research and Development (SCOReD), Kuala Lumpur, Malaysia, 13–14 December 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Zhu, C.; Peng, Y. A Boosted Multi-Task Model for Pedestrian Detection with Occlusion Handling. IEEE Trans. Image Process. 2015, 24, 5619–5629. [Google Scholar] [CrossRef] [PubMed]
- Abdelmutalab, A.; Wang, C. Pedestrian Detection Using MB-CSP Model and Boosted Identity Aware Non-Maximum Suppression. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24454–24463. [Google Scholar] [CrossRef]
- Saeidi, M.; Ahmadi, A. Deep Learning based on CNN for Pedestrian Detection: An Overview and Analysis. In Proceedings of the 2018 9th International Symposium on Telecommunications (IST), Tehran, Iran, 17–19 December 2018; pp. 108–112. [Google Scholar] [CrossRef]
- Feng, X.; Gu, X.; Kuang, P.; Li, X.; Zhu, Y. Pedestrian Detection and Tracking with Deep Mutual Learning. In Proceedings of the 2021 18th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 17–19 December 2021; pp. 217–220. [Google Scholar] [CrossRef]
- Zeng, H.; Ai, H. Pedestrian Detection with Central-Line Heatmap Regression. In Proceedings of the 2019 IEEE 2nd International Conference on Information Communication and Signal Processing (ICICSP), Weihai, China, 28–30 September 2019; pp. 444–448. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Wang, W.; Li, H. Robust Infrared Pedestrian Detection via GMR and Logistic Regression Based ROIs Extraction. In Proceedings of the 2018 11th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Beijing, China, 13–15 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Saeidi, M.; Ahmadi, A. Pedestrian Detection Using an Extended Fast RCNN based on a Secure Margin in RoI Feature Maps. In Proceedings of the 2018 9th International Symposium on Telecommunications (IST), Tehran, Iran, 17–19 December 2018; pp. 155–159. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.; Jiang, H.; Zeng, X. Strict NMS: Pedestrian Detection in Crowd Scenes. In Proceedings of the 2020 IEEE 3rd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 27–29 September 2020; pp. 225–230. [Google Scholar] [CrossRef]
- Tian, L.; Zhang, Z. Simple-NMS: Improved Pedestrian Detection with New Constraints. In Proceedings of the 2021 International Conference on Computer Communication and Artificial Intelligence (CCAI), Guangzhou, China, 7–9 May 2021; pp. 30–35. [Google Scholar] [CrossRef]
- Huang, X.; Ge, Z.; Jie, Z.; Yoshie, O. NMS by Representative Region: Towards Crowded Pedestrian Detection by Proposal Pairing. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10747–10756. [Google Scholar] [CrossRef]
- Toprak, T.; Gunel, S.; Belenlioglu, B.; Aydın, B.; Zoral, E.Y.; Alper Selver, M. Machine Learning Based Bounding Box Regression for Improved Pedestrian Detection. In Proceedings of the 2019 International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Rome, Italy, 27–29 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, H.; Yan, C.; Li, X.; Yang, Y.; Yuan, D. MSAGNet: Multi-Stream Attribute-Guided Network for Occluded Pedestrian Detection. IEEE Signal Process. Lett. 2022, 29, 2163–2167. [Google Scholar] [CrossRef]
- Ge, Z.; Hu, C.; Huang, X.; Qiu, B.; Yoshie, O. DualBox: Generating BBox Pair with Strong Correspondence via Occlusion Pattern Clustering and Proposal Refinement. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 2097–2102. [Google Scholar] [CrossRef]
- Omar, H.A.; Lu, N.; Zhuang, W. Wireless access technologies for vehicular network safety applications. IEEE Netw. 2016, 30, 22–26. [Google Scholar] [CrossRef]
- IEEE Std 1609.0-2019 (Revision of IEEE Std 1609.0-2013); IEEE Guide for Wireless Access in Vehicular Environments (WAVE) Architecture. IEEE: Piscataway, NJ, USA, 2019; pp. 1–106. [CrossRef]
- Segata, M.; Lo Cigno, R.; Tsai, H.-M.M.; Dressler, F. On platooning control using IEEE 802.11p in conjunction with visible light communications. In Proceedings of the 2016 12th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Cortina d’Ampezzo, Italy, 20–22 January 2016; pp. 1–4. [Google Scholar]
- Rengaraju, P.; Lung, C.-H. Network architecture and QoS study on software defined LTE vehicular ad hoc networks. In Proceedings of the 2016 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 21–22 October 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Tahir, M.N.; Mäenpää, K.; Hippi, M. Pedestrian Motion Detection & Pedestrian Communication (P2I & V2P). In Proceedings of the 2020 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2020; pp. 1–3. [Google Scholar] [CrossRef]
- Liu, Z.; Pu, L.; Meng, Z.; Yang, X.; Zhu, K.; Zhang, L. POFS: A novel pedestrian-oriented forewarning system for vulnerable pedestrian safety. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; pp. 100–105. [Google Scholar] [CrossRef]
- Liu, Z.; Pu, L.; Zhu, K.; Zhang, L. Design and evaluation of V2X communication system for vehicle and pedestrian safety. J. China Univ. Posts Telecommun. 2015, 22, 18–26. [Google Scholar] [CrossRef]
- Sewalkar, P.; Krug, S.; Seitz, J. Towards 802.11p-based vehicle-to-pedestrian communication for crash prevention systems. In Proceedings of the 2017 9th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Munich, Germany, 6–8 November 2017; pp. 404–409. [Google Scholar] [CrossRef]
- Karoui, M.; Berg, V.; Mayrargue, S. Assessment of V2X Communications for Enhanced Vulnerable Road Users Safety. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Moshkov, V.V.; Badin, A.D.; Guminskiy, O.A. Research of Characteristics of Radio Technologies of V2V/V2P Systems. In Proceedings of the 2022 Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), Saint Petersburg, Russia, 25–28 January 2022; pp. 64–68. [Google Scholar] [CrossRef]
- Hu, L.; Wang, H.; Zhao, Y. Performance Analysis of DSRC-Based Vehicular Safety Communication in Imperfect Channels. IEEE Access 2020, 8, 107399–107408. [Google Scholar] [CrossRef]
- Lin, C.-S.; Sun, C.-K.; Lin, J.-C.; Chen, B.-C. Performance evaluations of channel estimations in IEEE 802.11p environments. In Proceedings of the 2009 International Conference on Ultra Modern Telecommunications & Workshops, St. Petersburg, Russia, 12–14 October 2009; pp. 1–5. [Google Scholar] [CrossRef]
- IEEE P1609.0/D6.0; IEEE Draft Guide for Wireless Access in Vehicular Environments (WAVE)—Architecture. IEEE: Piscataway, NJ, USA, 2013; pp. 1–96.
- Marroquin, A.; To, M.A.; Azurdia-Meza, C.A.; Bolufé, S. A General Overview of Vehicle-to-X (V2X) Beacon-Based Cooperative Vehicular Networks. In Proceedings of the 2019 IEEE 39th Central America and Panama Convention (CONCAPAN XXXIX), Guatemala City, Guatemala, 20–22 November 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Morgan, Y.L. Notes on DSRC & WAVE Standards Suite: Its Architecture, Design, and Characteristics. IEEE Commun. Surv. Tutor. 2010, 12, 504–518. [Google Scholar] [CrossRef]
- Javed, M.A.; Zeadally, S.; Hamida, E.B. Data analytics for Cooperative Intelligent Transport Systems. Veh. Commun. 2019, 15, 63–72. [Google Scholar] [CrossRef]
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular Communications for ITS: Standardization and Challenges. IEEE Commun. Stand. Mag. 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef]
- INET Framework—INET Framework. Available online: https://inet.omnetpp.org/ (accessed on 16 May 2023).
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.-P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P. Microscopic Traffic Simulation using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2575–2582. [Google Scholar] [CrossRef]
- OpenStreetMap—SUMO Documentation. Available online: https://sumo.dlr.de/docs/Networks/Import/OpenStreetMap.html (accessed on 26 June 2023).
- Gates, T.J.; Noyce, D.A.; Bill, A.R.; Ee, N.V. Recommended Walking Speeds for Timing of Pedestrian Clearance Intervals Based on Characteristics of the Pedestrian Population. Transp. Res. Rec. 2006, 1982, 38–47. [Google Scholar] [CrossRef]
- Minhas, S.; Hernández-Sabaté, A.; Ehsan, S.; McDonald-Maier, K.D. Effects of Non-Driving Related Tasks During Self-Driving Mode. IEEE Trans. Intell. Transp. Syst. 2022, 23, 1391–1399. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Data rate | 3, 4.5, 6, 9, 12, 18, 24 and 27 Mbps |
| Transmission bandwidth | 10 MHz |
| Modulation schemes | BPSK, QPSK, 16-QAM, and 64-QAM |
| Codification rate | 1/2, 1/3, and 3/4 |
| Data sub-carriers | 52 |
| OFDM symbol duration | 8 μs |
| Guard interval | 1.6 μs |
| FFT period | 6.4 μs |
| Preamble duration | 32 μs |
| Sub-carriers spacing | 0.15625 MHz |
| Parameter | Value |
|---|---|
| Number of vehicles | 8 |
| Number of pedestrians | 1 |
| Maximum vehicle speed | 32 m/s |
| Maximum pedestrian speed | 2 m/s |
| Simulation time | 200 s |
| Distance of road trajectory | 700 m |
| Number of road lanes | 4 (2 in each direction) |
| Antenna type | Omnidirectional |
| Transmission power | 15 dbm |
| MAC layer | 802.11p |
| Packet size | 1400 bytes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerrero-Ibañez, A.; Amezcua-Valdovinos, I.; Contreras-Castillo, J. Integration of Wearables and Wireless Technologies to Improve the Interaction between Disabled Vulnerable Road Users and Self-Driving Cars. Electronics 2023, 12, 3587. https://doi.org/10.3390/electronics12173587
Guerrero-Ibañez A, Amezcua-Valdovinos I, Contreras-Castillo J. Integration of Wearables and Wireless Technologies to Improve the Interaction between Disabled Vulnerable Road Users and Self-Driving Cars. Electronics. 2023; 12(17):3587. https://doi.org/10.3390/electronics12173587
Chicago/Turabian StyleGuerrero-Ibañez, Antonio, Ismael Amezcua-Valdovinos, and Juan Contreras-Castillo. 2023. "Integration of Wearables and Wireless Technologies to Improve the Interaction between Disabled Vulnerable Road Users and Self-Driving Cars" Electronics 12, no. 17: 3587. https://doi.org/10.3390/electronics12173587
APA StyleGuerrero-Ibañez, A., Amezcua-Valdovinos, I., & Contreras-Castillo, J. (2023). Integration of Wearables and Wireless Technologies to Improve the Interaction between Disabled Vulnerable Road Users and Self-Driving Cars. Electronics, 12(17), 3587. https://doi.org/10.3390/electronics12173587