
A Hybrid Method of Adaptive Cross Approximation Algorithm and Chebyshev Approximation Technique for Fast Broadband BCS Prediction Applicable to Passive Radar Detection

Abstract
:1. Introduction
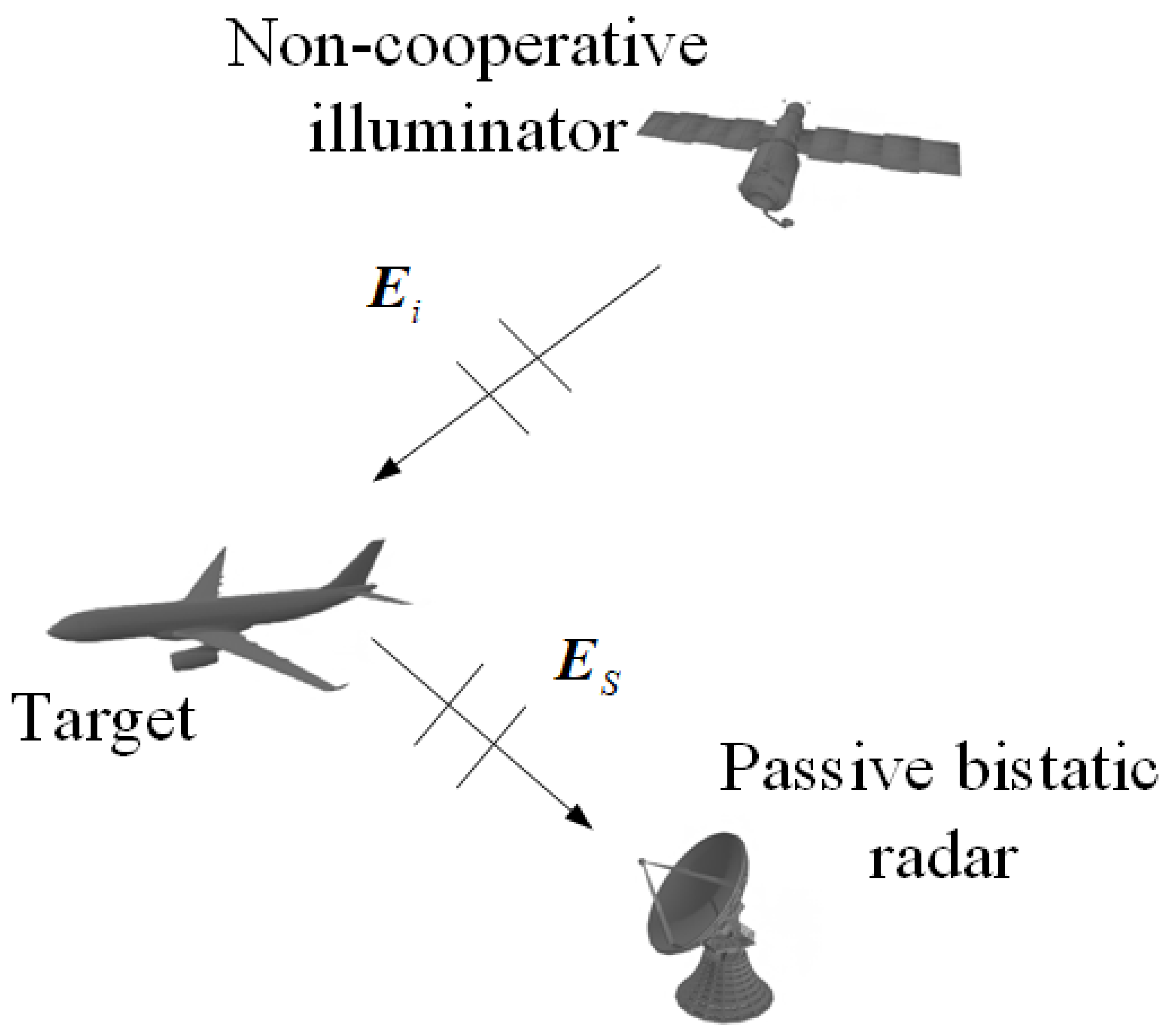
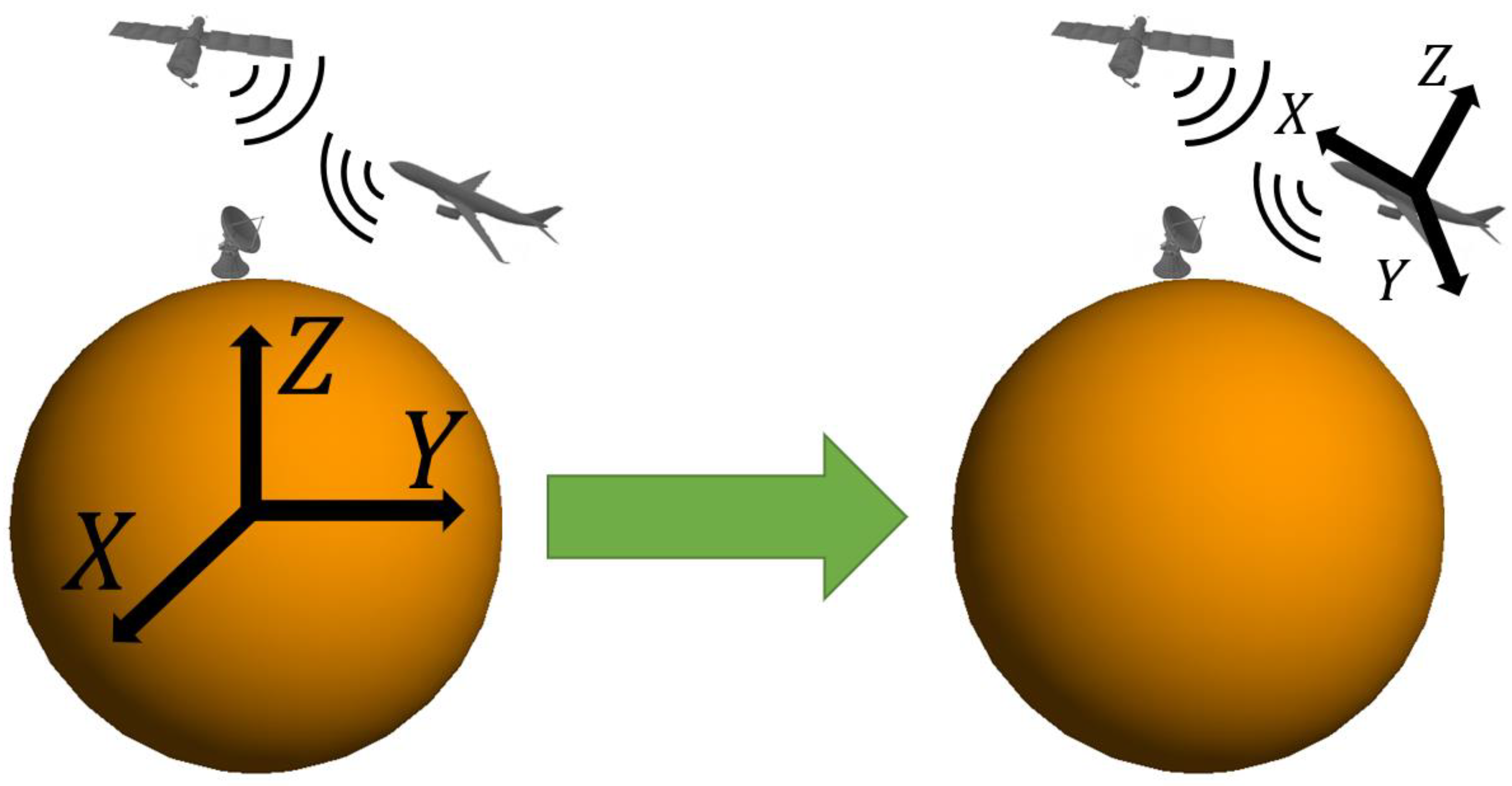
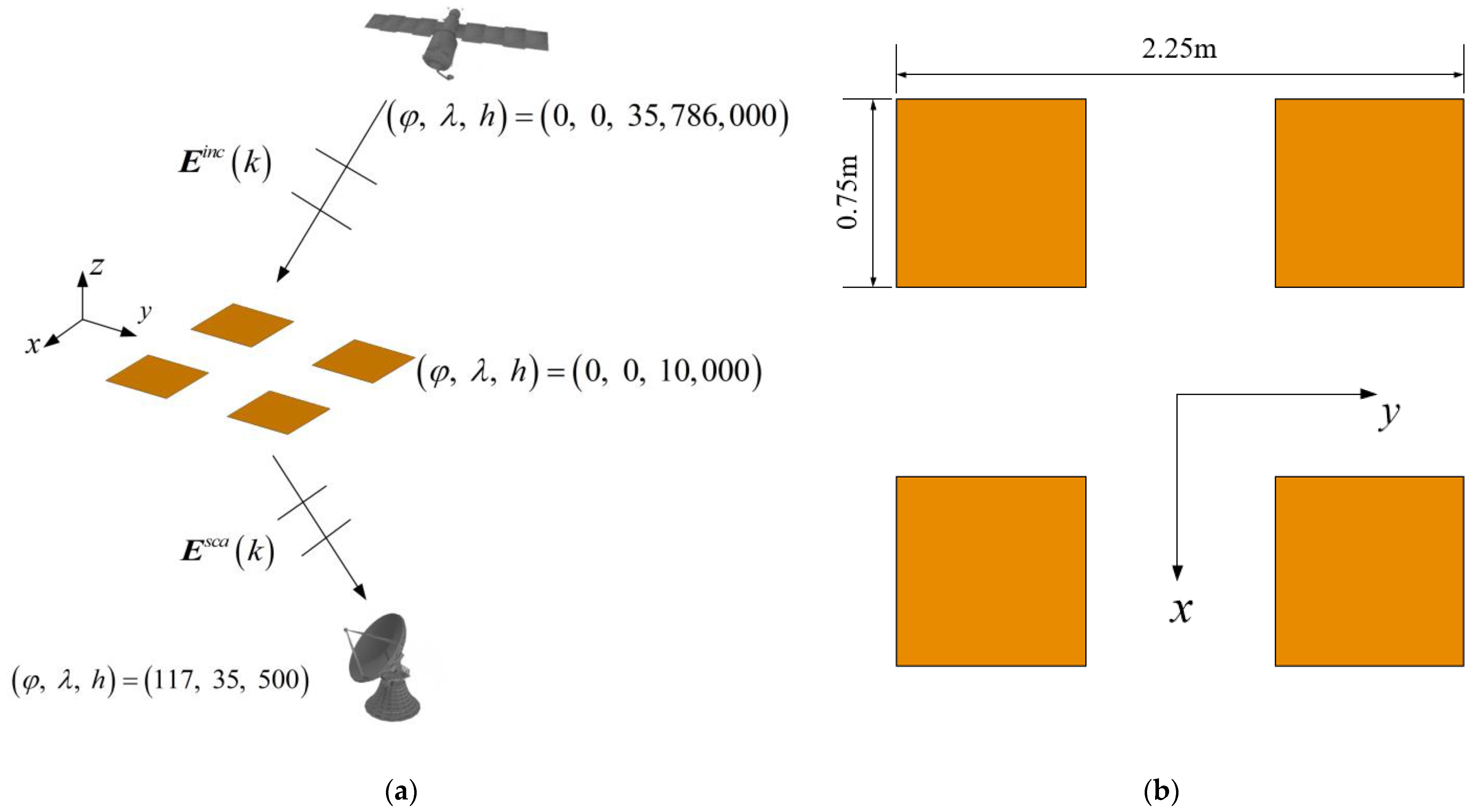
2. The MoM Based on Non-Cooperative Satellite-Borne Illuminator
3. ACA-CAT Formulation
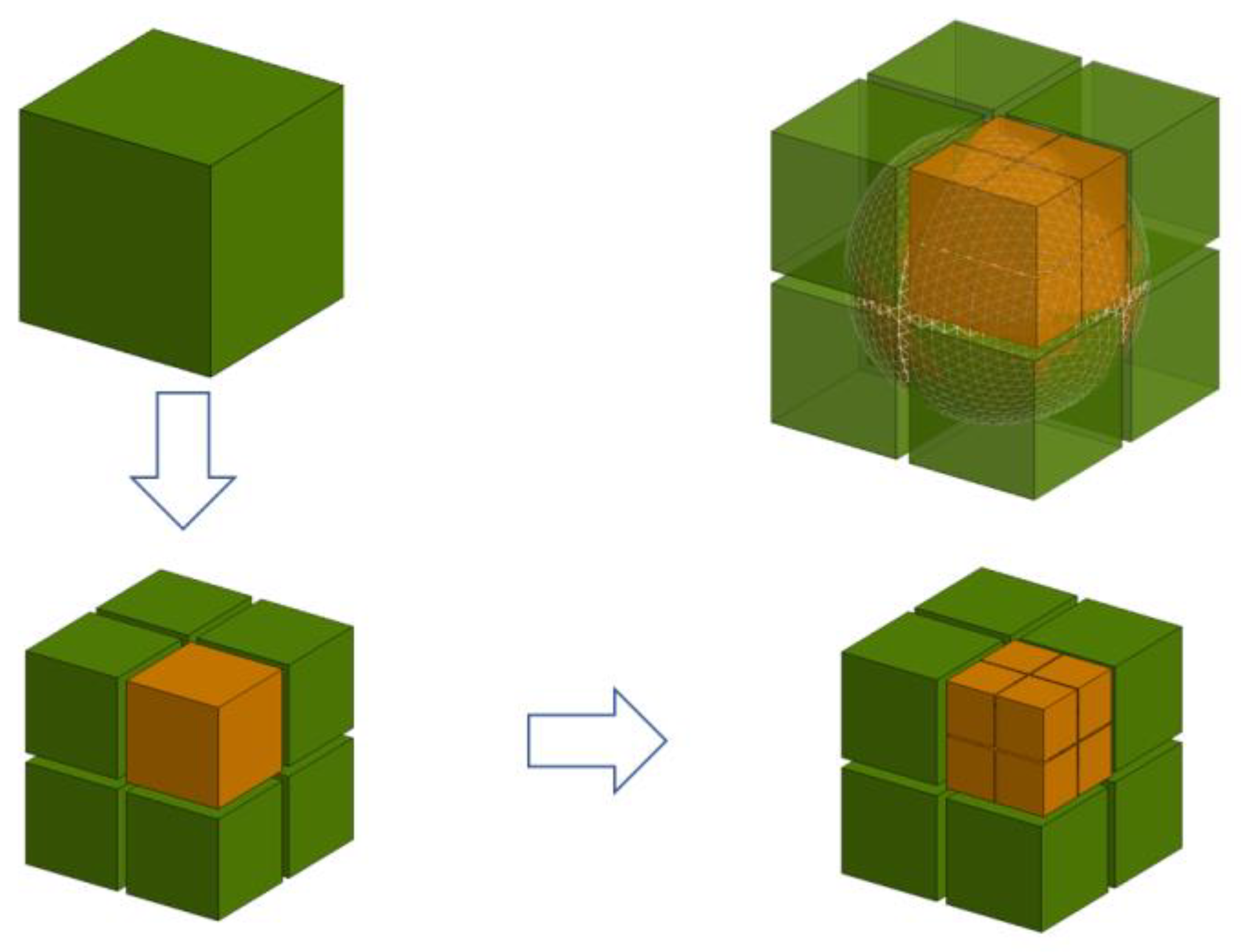
3.1. Group the Basis Function
3.2. Determine Chebyshev–Gauss Frequency Sampling Points
3.3. Fill Impedance Matrix
3.3.1. Initialization Section
- (1)
- Initialize the line index , and initialize .
- (2)
- Initialize the row of the error matrix: .
- (3)
- Find the index in the first column so that : .
- (4)
- .
- (5)
- Initialize the first column of the error matrix .
- (6)
- Obtain the first column of the U matrix .
- (7)
- Calculate the approximation matrix .
- (8)
- Determine the index of the second row : .
3.3.2. k-th Iteration
- (1)
- Update the ()-th row of the approximate error matrix: .
- (2)
- Find the maximum value in the ()-th row to determine the column : .
- (3)
- The k-th row of the V matrix is obtained .
- (4)
- Update the ()-th column of the approximate error matrix: .
- (5)
- The k-th column of the U matrix is obtained .
- (6)
- .
- (7)
- If , then the iteration is terminated; otherwise, continue to the next step.
- (8)
- Find the next row index : .
- where the termination condition of (7) is based on the selection condition of rank by .
3.4. Solve Wideband Surface Currents
| Algorithm 1 the hybrid ACA-CAT algorithm |
| Input: ,,, the Chebyshev polynomial expansion orders L. |
| Output: the coefficients of Chebyshev series, the Maehly approximation coefficients, |
| 1: Group of RWG basis functions on the target surface |
| 2: Dividing the impedance matrix into near-field and far-field blocks |
| 3: for to do |
| 4: Calculate the impedance matrix near-field block |
| 5: Compress the far-field blocks at the sampling points into the form of the product of two low-rank matrices by ACA: |
| 6: Then solve |
| 7: Compute the Coefficients of Chebyshev series and the Maehly approximation coefficients, |
| 8: end for |
| 9: for to frenum do |
| 10: Calculate the surface current at the wave number corresponding to each frequency point in the broadband: |
| 11: Obtain the radar scattering cross section at the wave number corresponding to each frequency point in the broadband of the target: |
| 12: end for |
4. Numerical Simulation Results and Analysis
4.1. A Four Patch Array
4.2. Four Discrete Objects
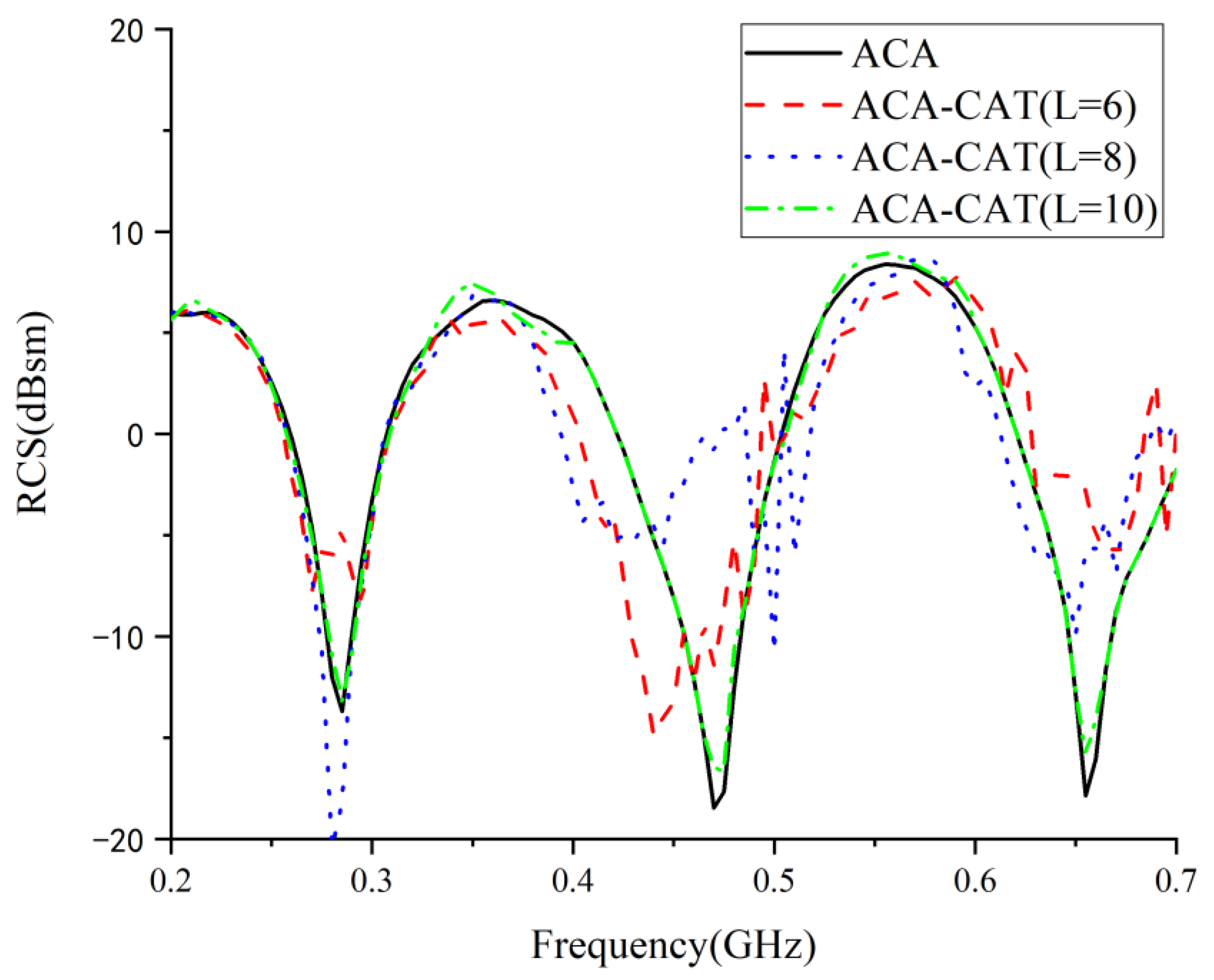
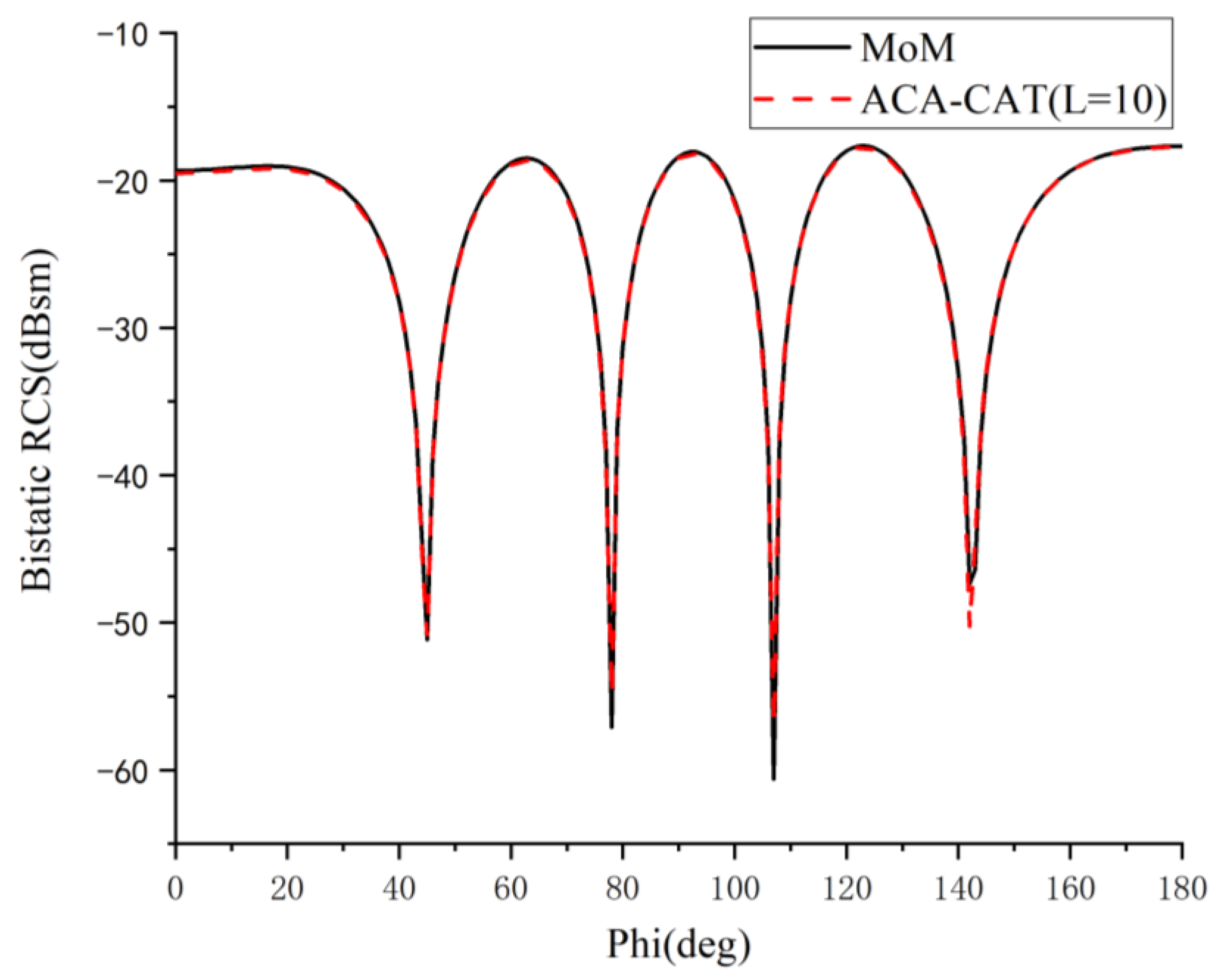
4.3. A Missile Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, Z.; Zhou, X.; Zhu, S.; Hong, S. Reduced Complexity Multipath Clutter Rejection Approach for DRM-Based HF Passive Bistatic Radar. IEEE Access 2017, 61, 20228–20234. [Google Scholar] [CrossRef]
- Palmer, J.E.; Harm, H.A.; Searle, S.J.; Davis, L. DVB-T Passive Radar Signal Processing. IEEE Trans. Signal Process. 2013, 61, 2116–2126. [Google Scholar] [CrossRef]
- Qiu, W.; Giusti, E.; Bacci, A.; Martorella, M.; Zhao, H.Z.; Fu, Q. Compressive sensing-based algorithm for passive bistatic ISAR with DVB-T signals. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2166–2180. [Google Scholar] [CrossRef]
- Navrátil, V.; Garry, J.L.; O’Brien, A.; Smith, G.E. Utilization of terrestrial navigation signals for passive radar. In Proceedings of the IEEE Radar Conference, Seattle, WA, USA, 8–12 May 2017; pp. 825–829. [Google Scholar]
- Tao, S.; Ran, T.; Yue, W.; Siyong, Z. Study of detection performance of passive bistatic radars based on FM broadcast. J. Syst. Eng. Electron. 2007, 18, 22–26. [Google Scholar] [CrossRef]
- Shi, C.; Wang, F.; Sellathura, M.; Zhou, J. Transmitter Subset Selection in FM-Based Passive Radar Networks for Joint Target Parameter Estimation. IEEE Trans. Aerosp. Electron. Syst. 2016, 16, 6043–6052. [Google Scholar] [CrossRef]
- Griffiths, H.D.; Long, N.R. Television based bistatic radar. IEE Proc. F Commun. Radar Signal Process. 1986, 133, 649–657. [Google Scholar] [CrossRef]
- Tan, D.K.P.; Sun, H.; Lu, Y.; Lesturgie, M.; Chan, H.L. Passive radar using global system for mobile communication signal: Theory, implementation and measurements. IEE Proc. Radar Sonar Navigat. 2005, 152, 116–123. [Google Scholar] [CrossRef]
- Gogineni, S.; Rangaswamy, M.; Rigling, B.D.; Nehorai, A. Ambiguity function analysis for UMTS-Based passive multistatic radar. IEEE Trans. Signal Process. 2014, 62, 2945–2957. [Google Scholar] [CrossRef]
- Griffiths, H.D.; Garnett, A.J.; Baker, C.J.; Keaveney, S. Bistatic radar using satellite-borne illuminators of opportunity. In Proceedings of the International Conference on Radar, Brighton, UK, 12–13 October 1992; pp. 276–279. [Google Scholar]
- Li, M.Z.; Li, X.J. Detectability of maritime targets using passive radar based on satellite-borne illuminators. In Proceedings of the International Conference on Electronics Technology, Chengdu, China, 10–13 May 2019; pp. 273–276. [Google Scholar]
- Pastina, D.; Santi, F.; Pieralice, F.; Ma, H.; Tzagkas, D.; Antoniou, M.; Cherniakov, M. Maritime moving target long time integration for GNSS-Based passive bistatic radar. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 3060–3083. [Google Scholar] [CrossRef] [Green Version]
- Rosenberg, L.; Ouellette, J.D.; Dowgiallo, D.J. Passive bistatic sea clutter statistics from spaceborne illuminators. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3971–3984. [Google Scholar] [CrossRef]
- Yang, M.L.; Wu, B.Y.; Gao, H.W.; Sheng, X.Q. A Ternary Parallelization Approach of MLFMA for Solving Electromagnetic Scattering Problems With Over 10 Billion Unknowns. IEEE Trans. Antennas Propag. 2019, 67, 6965–6978. [Google Scholar] [CrossRef]
- Hughey, S.; Aktulga, H.M.; Vikram, M.; Lu, M.; Shanker, B.; Michielssen, B. Parallel Wideband MLFMA for Analysis of Electrically Large, Nonuniform, Multiscale Structures. IEEE Trans. Antennas Propag. 2019, 67, 1094–1107. [Google Scholar] [CrossRef]
- Khalichi Ergül, Ö.; Takrimi, M.; Ertürk, V.B. Broadband Analysis of Multiscale Electromagnetic Problems: Novel Incomplete-Leaf MLFMA for Potential Integral Equations. IEEE Trans. Antennas Propag. 2021, 69, 9032–9037. [Google Scholar] [CrossRef]
- Wu, C.B.; Guan, L.; Gu, P.F.; Chen, R.S. Application of Parallel CM-MLFMA Method to the Analysis of Array Structures. IEEE Trans. Antennas Propag. 2021, 9, 6116–6121. [Google Scholar] [CrossRef]
- Karaosmanoğlu, B.; Ergül, Ö. Acceleration of MLFMA Simulations Using Trimmed Tree Structures. IEEE Trans. Antennas Propag. 2021, 69, 356–365. [Google Scholar] [CrossRef]
- Sharma, S.; Triverio, P. AIMx: An Extended Adaptive Integral Method for the Fast Electromagnetic Modeling of Complex Structures. IEEE Trans. Antennas Propag. 2021, 69, 8603–8617. [Google Scholar] [CrossRef]
- Yang, K.; Ning, C.; Yin, W.Y. Characterization of Near-Field Coupling Effects From Complicated Three-Dimensional Structures in Rectangular Cavities Using Fast Integral Equation Method. IEEE Trans. Electromagn. Compat. 2017, 59, 639–645. [Google Scholar] [CrossRef]
- Seo, S.W.; Lee, J.F. A fast IE-FFT algorithm for solving PEC scattering problems. IEEE Trans. Magn. 2005, 41, 1476–1479. [Google Scholar]
- Gibson, W.C. Efficient Solution of Electromagnetic Scattering Problems Using Multilevel Adaptive Cross Approximation and LU Factorization. IEEE Trans. Antennas Propag. 2020, 68, 3815–3823. [Google Scholar] [CrossRef]
- Zhao, K.; Vouvakis, M.N.; Lee, J.-F. Application of the multilevel adaptive cross-approximation on ground plane designs. IEEE Int. Symp. Electromagn. Compat. 2004, 1, 124–127. [Google Scholar]
- Zhao, K.; Vouvakis, M.N.; Lee, J.-F. The Adaptive Cross Approximation Algorithm for Accelerated Method of Moments Computations of EMC problems. IEEE Trans. Electromagn. Compat. 2005, 47, 763–773. [Google Scholar] [CrossRef]
- Wu, Q.Q.; Chen, J.Z.; Wu, Z.Q.; Gong, H.W. Synthesis and Design of 5G Duplexer Based on Optimization Method. ZTE Commun. 2022, 20, 70–76. [Google Scholar]
- Jeong, Y.R.; Hong, I.P.; Lee, K.W.; Lee, J.H.; Yook, J.G. Fast Frequency Sweep Using Asymptotic Waveform Evaluation Technique and Thin Dielectric Sheet Approximation. IEEE Trans. Antennas Propag. 2016, 64, 1800–1806. [Google Scholar] [CrossRef]
- Hassan, M.A.M.; Kishk, A.A. A Combined Asymptotic Waveform Evaluation and Random Auxiliary Sources Method for Wideband Solutions of General-Purpose EM Problems. IEEE Trans. Antennas Propag. 2019, 67, 4010–4021. [Google Scholar] [CrossRef]
- Kong, W.J.; Xie, J.; Zhou, F.; Yang, X.; Wang, R.; Zheng, K. An efficient FG-FFT with optimal replacement scheme and inter/extrapolation method for analysis of electromagnetic scattering over a frequency band. IEEE Access 2019, 7, 127511–127520. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, S.; Xue, H.; Gong, S.X.; Liu, Z.L. A Chebyshev approximation technique based on AIM-PO for wide-band analysis. IEEE Antennas Wireless Propag. Lett. 2016, 15, 93–97. [Google Scholar] [CrossRef]
- Wang, X.; Gong, H.X.; Zhang, S.; Liu, Y.; Yang, R.P.; Liu, C.H. Efficient RCS computation over a broad frequency band using subdomain MoM and Chebyshev approximation technique. IEEE Access 2020, 8, 33522–33531. [Google Scholar] [CrossRef]
- Slone, R.D.; Lee, R.; Lee, J.F. Multipoint Galerkin asymptotic waveform evaluation for model order reduction of frequency domain FEM electromagnetic radiation problems. IEEE Trans. Antennas Propag. 2001, 49, 1504–1513. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Sheng, X.Q. A bandwidth estimation approach for the asymptotic waveform technique. IEEE Trans. Antennas Propag. 2008, 56, 913–917. [Google Scholar] [CrossRef]
- Wei, X.C.; Zhang, Y.J.; Li, E.P. The hybridization of fast multipole method with asymptotic waveform evaluation for the fast monostatic RCS computation. IEEE Trans. Antennas Propag. 2004, 52, 605–607. [Google Scholar] [CrossRef]
- Jo, K.; Lee, M.; Sunwoo, M. Fast GPS-DR senor fusion framework: Removing the geodetic coordinate conversion process. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2008–2013. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Examples | Methods | Memory (MB) | CPU Time (s) | RMSE (dBsm) |
|---|---|---|---|---|
| patch array | ACA-CAT_L = 4 ACA-CAT_L = 6 ACA-CAT_L = 8 ACA | 37.5 37.5 37.5 37.5 | 329 495 683 5780 | 1.30 1.23 0.84 / |
| discrete objects | ACA-CAT_L = 2 ACA-CAT_L = 4 ACA-CAT_L = 6 ACA | 49.9 45.9 45.9 49.6 | 180 420 826 5385 | 1.28 0.70 0.61 / |
| missile model | ACA-CAT_L = 6 ACA-CAT_L = 8 ACA-CAT_L = 10 ACA | 530.3 530.3 530.3 530.3 | 68,207 90,942 113,678 378,927 | 4.91 3.08 0.95 / |
| Examples | Methods | Memory (MB) | CPU Time (s) | RMSE (dBsm) |
|---|---|---|---|---|
| patch array | MoM ACA ACA-CAT_L = 8 MoM-AWE_Q = 8 | 97.5 37.5 37.5 780.1 | 11,479 5460 629 | / 0.24 1.34 |
| 2726 | 0.17 | |||
| discrete objects | MoM ACA ACA-CAT_L = 6 MoM-AWE_Q = 8 | 59.6 45.3 48.7 477.1 | 8680 5090 826 1652 | / 0.09 0.72 0.11 |
| missile model | MoM ACA ACA-CAT_L = 10 MoM-AWE_Q = 8 | 2112.4 530.3 530.3 | 589,831 378,927 113,678 | / 0.25 1.15 |
| 16,899.2 | 164,404 | 0.41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Chen, L.; Li, F.; Liu, C.; Liu, Y.; Xu, Z.; Zhang, H. A Hybrid Method of Adaptive Cross Approximation Algorithm and Chebyshev Approximation Technique for Fast Broadband BCS Prediction Applicable to Passive Radar Detection. Electronics 2023, 12, 295. https://doi.org/10.3390/electronics12020295
Wang X, Chen L, Li F, Liu C, Liu Y, Xu Z, Zhang H. A Hybrid Method of Adaptive Cross Approximation Algorithm and Chebyshev Approximation Technique for Fast Broadband BCS Prediction Applicable to Passive Radar Detection. Electronics. 2023; 12(2):295. https://doi.org/10.3390/electronics12020295
Chicago/Turabian StyleWang, Xing, Lin Chen, Fang Li, Chunheng Liu, Ying Liu, Zhou Xu, and Hairong Zhang. 2023. "A Hybrid Method of Adaptive Cross Approximation Algorithm and Chebyshev Approximation Technique for Fast Broadband BCS Prediction Applicable to Passive Radar Detection" Electronics 12, no. 2: 295. https://doi.org/10.3390/electronics12020295