
Output Waveform Distortion Suppression Method of Asymmetric Sine Wave Inverter Based on Online Identification and Linearization of System Transmission Characteristics


Abstract
:1. Introduction
2. Output Waveform Distortion Mechanism and the Linearization of Transmission Characteristics
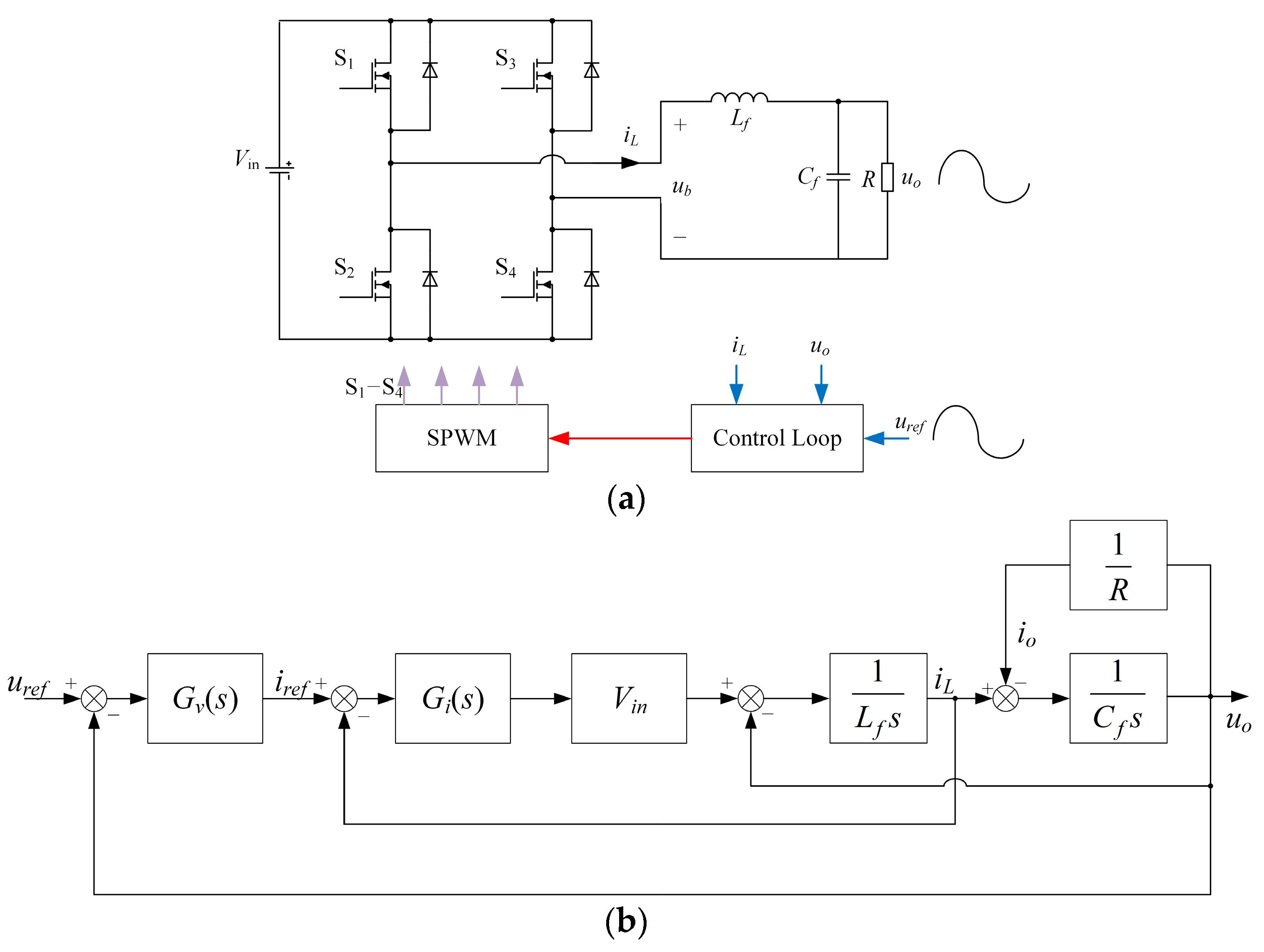
2.1. Output Waveform Distortion Mechanism and Transmission Characteristics
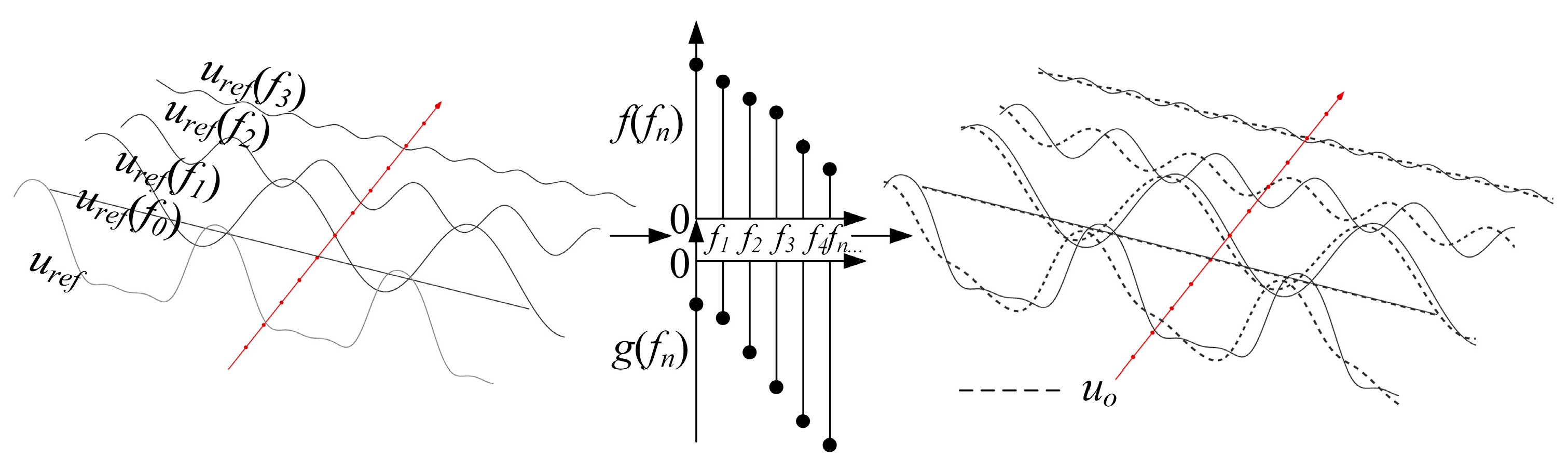
2.2. Linearization of Transmission Characteristics
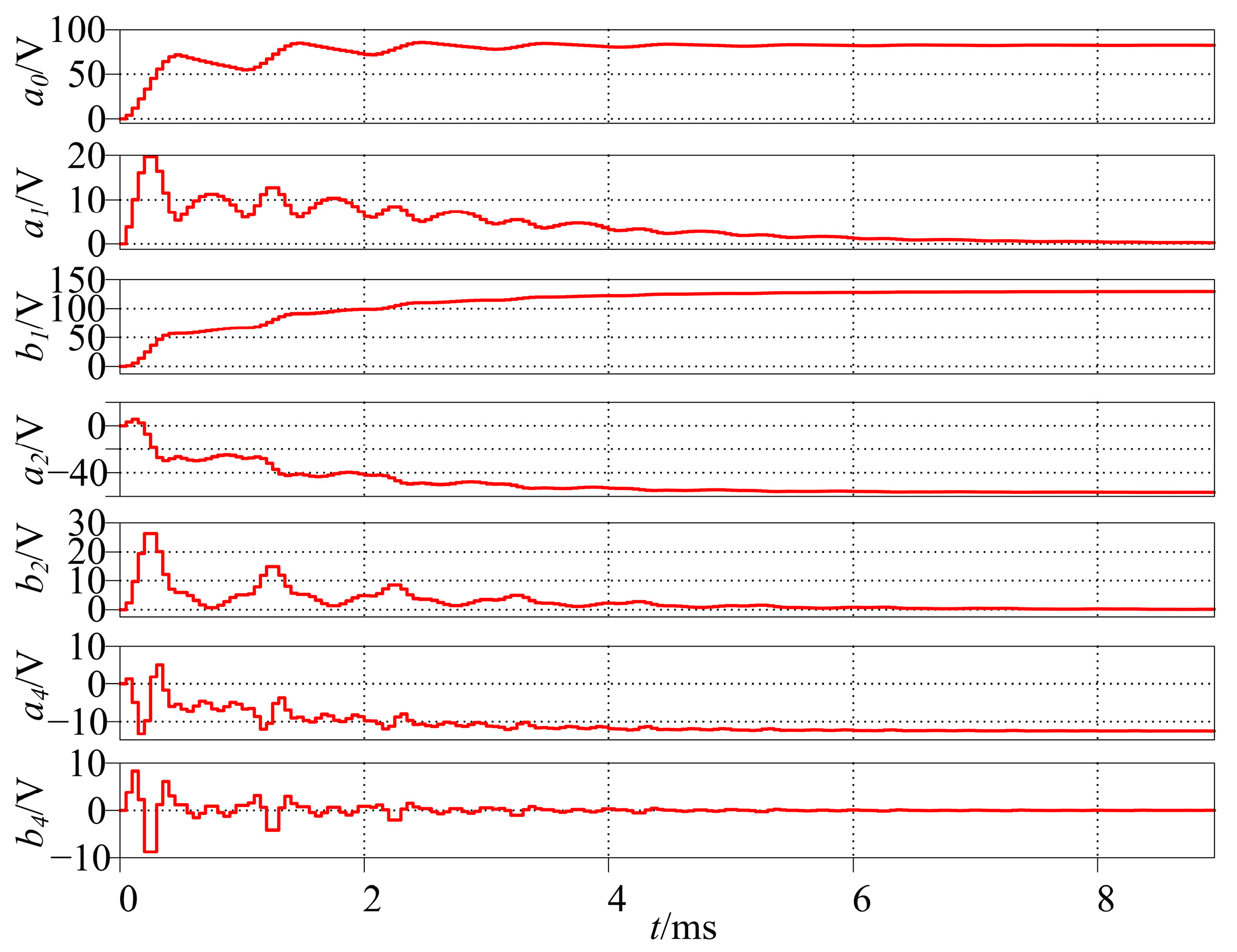
3. Online Identification Method of Transmission Characteristics Based on the State Observer
4. Simulation and Experimental Verification
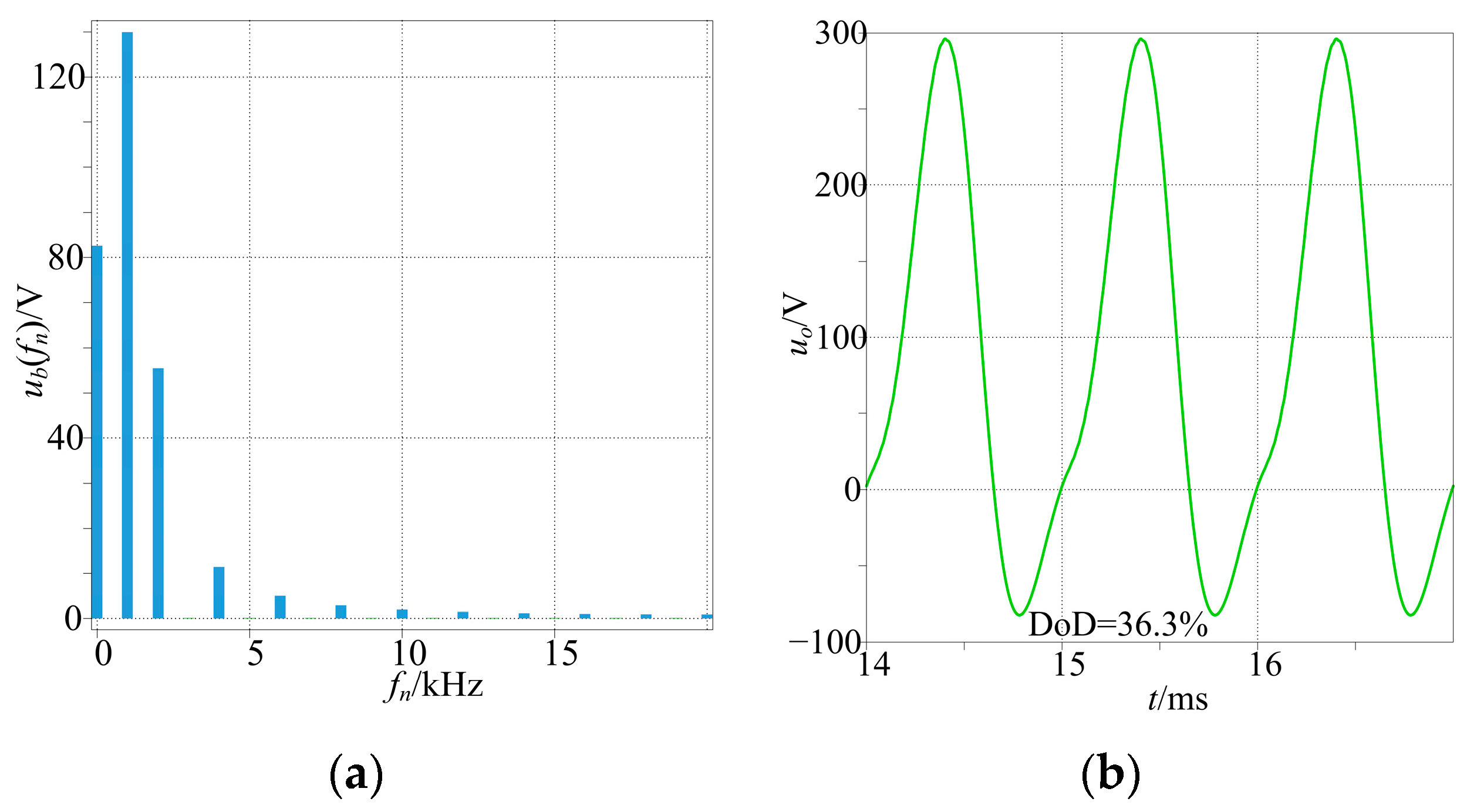
4.1. Simulation Verification
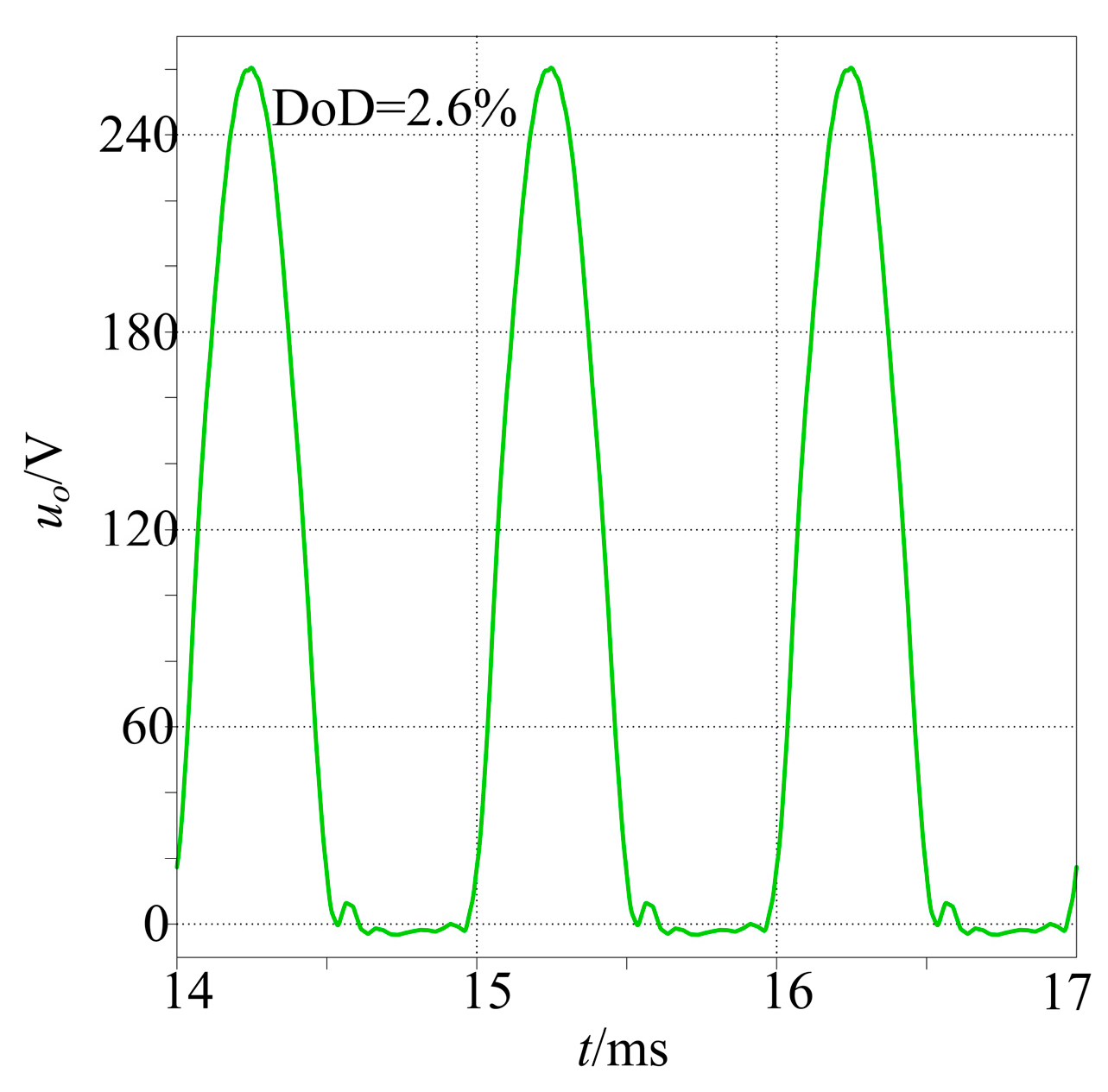
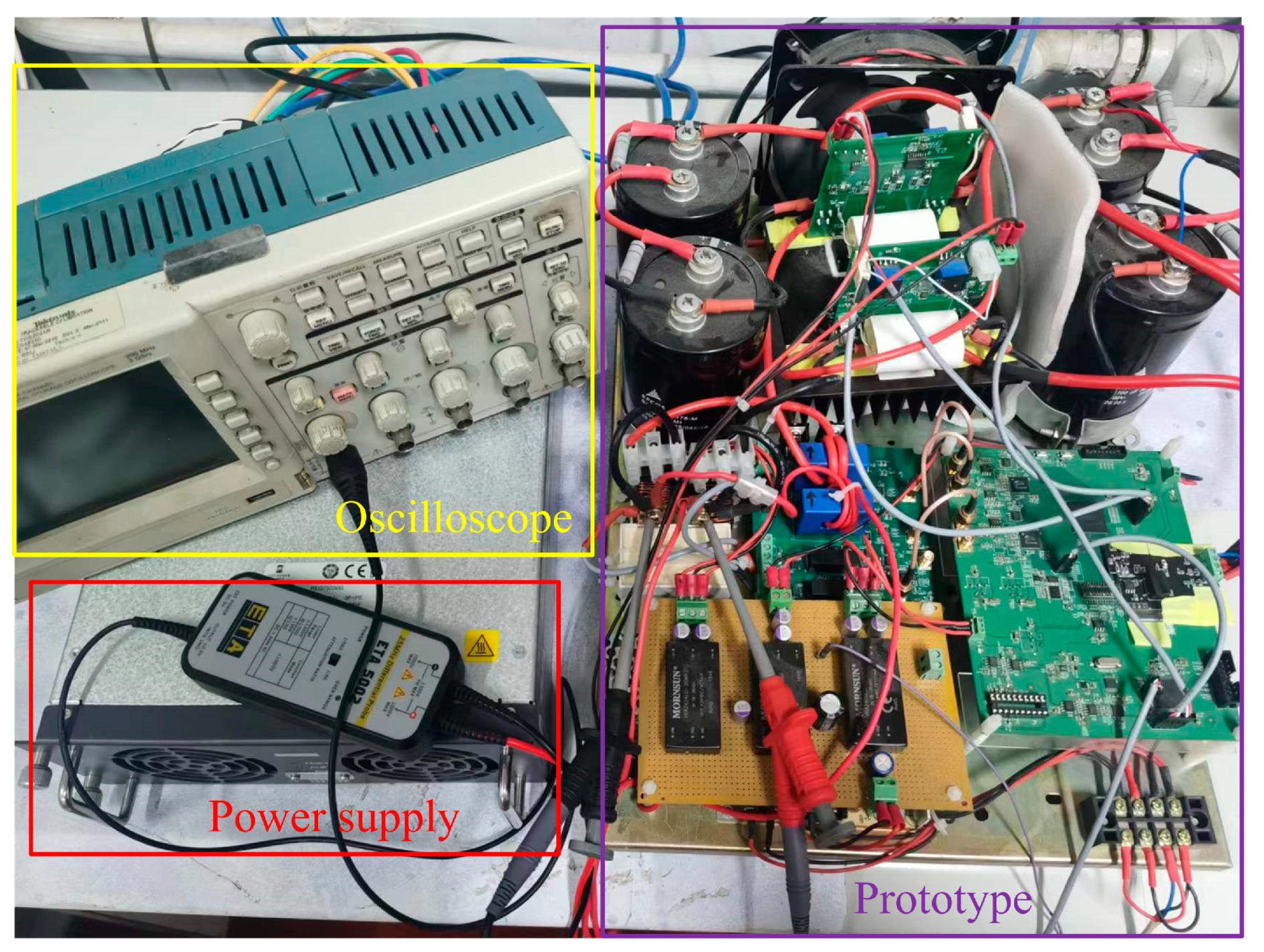
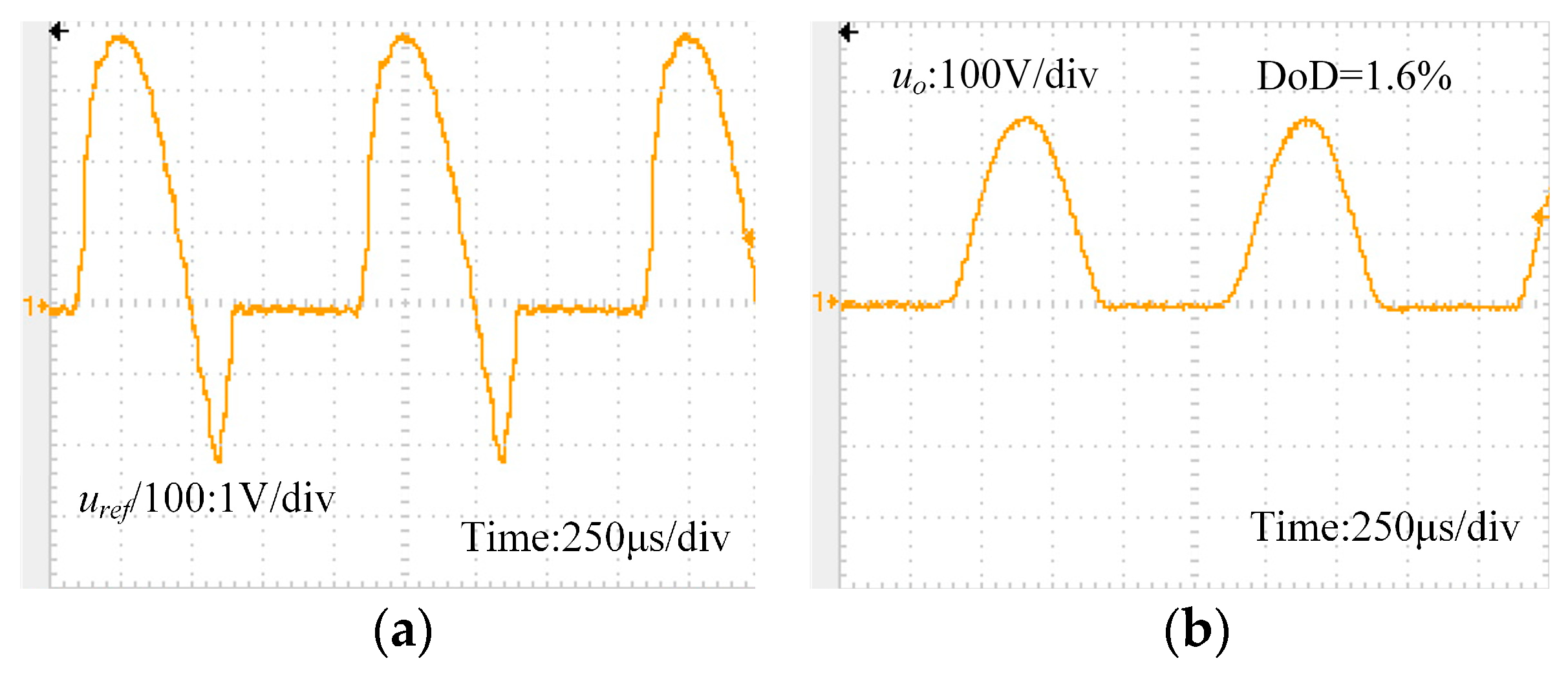
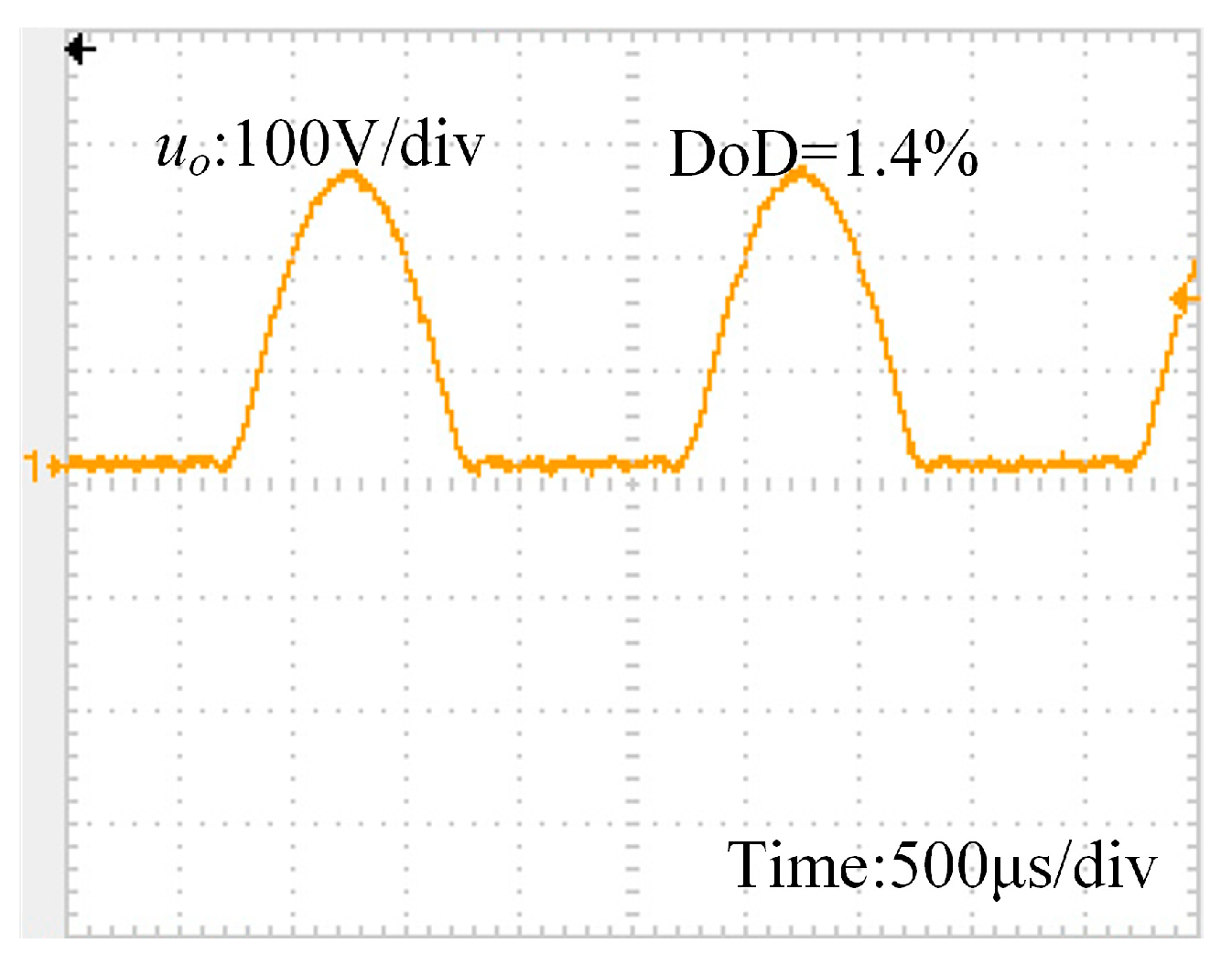
4.2. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Krishna, L.R.; Somaraju, K.; Sundararajan, G. The tribological performance of ultra-hard ceramic composite coatings obtained through microarc oxidation. Surf. Coat. Technol. 2003, 163, 484–490. [Google Scholar] [CrossRef]
- Lee, J.L.; Jian, S.Y.; Kuo, K.N.; You, J.L.; Lai, Y.T. Effect of Surface Properties on Corrosion Resistance of ZK60 Mg Alloy Microarc Oxidation Coating. IEEE Trans. Plasma Sci. 2019, 47, 1172–1180. [Google Scholar] [CrossRef]
- Chen, M.; Ma, Y.; Hao, Y. Local arc discharge mechanism and requirements of power supply in micro-arc oxidation of magnesium alloy. Front. Mech. Eng. 2010, 5, 98–105. [Google Scholar] [CrossRef]
- Zhang, W.; Zheng, Z.; Liu, H. Droop Control Method to Achieve Maximum Power Output of Photovoltaic for Parallel Inverter System. CSEE J. Power Energy Syst. 2022, 8, 1636–1645. [Google Scholar] [CrossRef]
- Deng, W.; Zhang, Y.; Tang, Y.; Li, Q.; Yi, Y. A neural network-based adaptive power-sharing strategy for hybrid frame inverters in a microgrid. Front. Energy Res. 2023, 10, 1082948. [Google Scholar] [CrossRef]
- Mohammed, S.A.Q.; Rafaq, M.S.; Choi, H.H.; Jung, J.W. A Robust Adaptive PI Voltage Controller to Eliminate Impact of Disturbances and Distorted Model Parameters for 3-Phase CVCF Inverters. IEEE Trans. Ind. Inform. 2020, 16, 2168–2176. [Google Scholar] [CrossRef]
- Gholizade-Narm, H.; Khajehoddin, S.A.; Karimi-Ghartemani, M. Reduced-Order Controllers Using Integrated Controller-Plant Dynamics Approach for Grid-Connected Inverters. IEEE Trans. Ind. Electron. 2021, 68, 7444–7453. [Google Scholar] [CrossRef]
- Zhou, K.; Low, K.S.; Wang, D.; Luo, F.L.; Zhang, B.; Wang, Y. Zero-phase odd-harmonic repetitive controller for a single-phase PWM inverter. IEEE Trans. Power Electron. 2006, 21, 193–201. [Google Scholar] [CrossRef]
- Mohapatra, S.R.; Agarwal, V. Model Predictive Controller With Reduced Complexity for Grid-Tied Multilevel Inverters. IEEE Trans. Ind. Electron. 2019, 66, 8851–8855. [Google Scholar] [CrossRef]
- Zheng, L.; Jiang, F.; Song, J.; Gao, Y.; Tian, M. A Discrete-Time Repetitive Sliding Mode Control for Voltage Source Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1553–1566. [Google Scholar] [CrossRef]
- Kawamura, A.; Chuarayapratip, R.; Haneyoshi, T. Deadbeat control of PWM inverter with modified pulse patterns for uninterruptible power supply. IEEE Trans. Ind. Electron. 1988, 35, 295–300. [Google Scholar] [CrossRef]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]
- Albatran, S.; Al Khalaileh, A.R.; Allabadi, A.S. Minimizing Total Harmonic Distortion of a Two-Level Voltage Source Inverter Using Optimal Third Harmonic Injection. IEEE Trans. Power Electron. 2020, 35, 3287–3297. [Google Scholar] [CrossRef]
- Lu, C.; Zhou, B.; Lei, J.; Shan, J. Mains Current Distortion Suppression for Third-Harmonic Injection Two-Stage Matrix Converter. IEEE Trans. Power Electron. 2021, 36, 7202–7211. [Google Scholar] [CrossRef]
- Albatran, S.; Allabadi, A.S.; Al Khalaileh, A.R.; Fu, Y. Improving the Performance of a Two-Level Voltage Source Inverter in the Overmodulation Region Using Adaptive Optimal Third Harmonic Injection Pulsewidth Modulation Schemes. IEEE Trans. Power Electron. 2021, 36, 1092–1103. [Google Scholar] [CrossRef]
- Pham, K.D.; Van Nguyen, N. A Reduced Common-Mode-Voltage Pulsewidth Modulation Method With Output Harmonic Distortion Minimization for Three-Level Neutral-Point-Clamped Inverters. IEEE Trans. Power Electron. 2020, 35, 6944–6962. [Google Scholar] [CrossRef]
- Liu, Y.; Hong, H.; Huang, A.Q. Real-Time Calculation of Switching Angles Minimizing THD for Multilevel Inverters With Step Modulation. IEEE Trans. Ind. Electron. 2009, 56, 285–293. [Google Scholar] [CrossRef]
- Chierchie, F.; Paolini, E.E.; Stefanazzi, L. Dead-Time Distortion Shaping. IEEE Trans. Power Electron. 2019, 34, 53–63. [Google Scholar] [CrossRef]
- Zhao, D.; Hari, V.S.S.P.K.; Narayanan, G.; Ayyanar, R. Space-Vector-Based Hybrid Pulsewidth Modulation Techniques for Reduced Harmonic Distortion and Switching Loss. IEEE Trans. Power Electron. 2010, 25, 760–774. [Google Scholar] [CrossRef]
- Dragonas, F.A.; Neretti, G.; Sanjeevikumar, P.; Grandi, G. High-Voltage High-Frequency Arbitrary Waveform Multilevel Generator for DBD Plasma Actuators. IEEE Trans. Ind. Appl. 2015, 51, 3334–3342. [Google Scholar] [CrossRef]
- Singh, B.; Kant, P. Multipulse AC–DC Converter Fed 15-Level Cascaded MLI-Based IVCIMD for Medium-Power Application. IEEE Trans. Ind. Appl. 2019, 55, 858–868. [Google Scholar] [CrossRef]
- Modeer, T.; Pallo, N.; Foulkes, T.; Barth, C.B.; Pilawa-Podgurski, R.C.N. Design of a GaN-Based Interleaved Nine-Level Flying Capacitor Multilevel Inverter for Electric Aircraft Applications. IEEE Trans. Power Electron. 2020, 35, 12153–12165. [Google Scholar] [CrossRef]
- Venkataramanaiah, J.; Suresh, Y.; Panda, A.K. Design and Development of a Novel 19-Level Inverter Using an Effective Fundamental Switching Strategy. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1903–1911. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Switching and control frequency/kHz | 20 |
| Sampling and observer frequency/kHz | = 50 |
| Filter parameters | Lf = 2.2 mH, Cf = 4.7 uF |
| Input DC voltage | Vin = 500 V |
| Load resistance | 30 Ω |
| Output voltage | P = 260 V, N = 0 V |
| Output frequency/Hz | 1000 |
| Observer gain coefficient |
| Parameter | Value | |||
|---|---|---|---|---|
| Harmonic order | DC | 1 | 2 | 3 |
| Observed amplitude/V | 82.64 | 129.81 | 55.41 | 11.26 |
| Observed phase/° | / | 0.03 | 89.99 | 89.97 |
| Theoretical amplitude/V | 82.76 | 130.00 | 55.17 | 11.03 |
| Theoretical phase/° | / | 0.00 | 90.00 | 90.00 |
| Relative error of amplitude/% | −0.14 | −0.14 | 0.44 | 2.08 |
| Relative error of angle/% | / | / | 0.01 | 0.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ning, J.; Ben, H.; Li, J.; Wang, X.; Meng, T. Output Waveform Distortion Suppression Method of Asymmetric Sine Wave Inverter Based on Online Identification and Linearization of System Transmission Characteristics. Electronics 2023, 12, 4279. https://doi.org/10.3390/electronics12204279
Ning J, Ben H, Li J, Wang X, Meng T. Output Waveform Distortion Suppression Method of Asymmetric Sine Wave Inverter Based on Online Identification and Linearization of System Transmission Characteristics. Electronics. 2023; 12(20):4279. https://doi.org/10.3390/electronics12204279
Chicago/Turabian StyleNing, Jichao, Hongqi Ben, Jinhui Li, Xuesong Wang, and Tao Meng. 2023. "Output Waveform Distortion Suppression Method of Asymmetric Sine Wave Inverter Based on Online Identification and Linearization of System Transmission Characteristics" Electronics 12, no. 20: 4279. https://doi.org/10.3390/electronics12204279