2.1. Preprocessing and Rough Registration Based on Geographic Information
In the field of airborne image processing, timeliness is one of researchers’ key concerns. When performing image stitching, due to significant fluctuations in the flight speed, ground coverage, and scene illumination of Unmanned Aerial Vehicles (UAVs) and other aircraft, the overlap range of sequence images also changes during stitching. For airborne image stitching, only the overlapping areas between two images are necessary for the registration calculation. It is a waste of time to perform image feature extraction and matching on non-overlapping areas. To solve the above problems, the method of geographic location mapping can be used to calculate the geographic positions of the image center and the four vertices of the image. This calculation process typically requires a low level of computation, and through this relatively small amount of geographic location mapping, three obvious advantages can be obtained. For one, it can determine the overlapping area between two images, avoid extracting feature points in non-overlapping areas, and save a large amount of computation power. Secondly, it can ensure that the image to be registered has unified geometric parameters, ensuring that the actual ground scene corresponding to the neighborhood of the feature points is consistent. In addition, the true north direction of the image can also be determined, thereby unifying the direction of feature point descriptors in advance. In the subsequent feature point-matching process, there is no need to set the main direction.
During flight, the aerial imaging system is mounted on the base of an aircraft, such as a UAV, and the image is the projection of the target area on the image sensor, located in the camera coordinate system. The actual position that usually needs to be calculated is the coordinates of the ground, such as the WGS-84 coordinate system used by GPS, which includes three coordinate values: longitude L, latitude M, and altitude H.
In the process of converting the target from the camera coordinate system (system C) to the geodetic coordinate system (system G), the use of an intermediate coordinate system is required to assist in completing coordinate conversion, which is also a prerequisite for the localization calculation. Usually, the number of intermediate process coordinate systems needs to comprehensively consider the localization requirements, the main equipment integrated with the carrier and its installation location, the structure and installation method of the aviation optoelectronic platform, etc. This article establishes four intermediate process coordinate systems, namely platform coordinate system P, UAV body coordinate system B, UAV geographic coordinate system V, and an Earth-centered Earth-fixed coordinate system (ECEF; system E).
The core process of the target localization method adopted by this paper is shown in
Figure 4.
Since the purpose of image registration is not to obtain the longitude and latitude of the target area, but to map the image to a reference coordinate system that does not move with the carrier, it only needs to be converted to the ECFF coordinate system. This coordinate system is already based on the geocentric coordinate system, which can meet the needs of image mapping and avoid complex iterative operations during the conversion to the geodetic coordinate system. Therefore, the four vertices and center points of the image can be transformed into the ECFF coordinate system through homogeneous coordinate transformation.
The homogeneous coordinates of a target in the camera coordinate system are
where
u and
v are the target’s coordinates in the image (in pixels), and
f is the current focal length of the camera. Usually, when the UAV detects a target, the photoelectric platform will lock the detected target in the center of the field of view (FOV) with multiple pixels, and then the target is in the center of the image. When an error inside the camera coordinate system is ignored, the homogeneous coordinates of the target can be expressed as
. The camera carrier is a photoelectric platform, which outputs information on angles a and e between the line of sight (LOS) and the zero positions of two platform angles and measures the target distance
R through a laser range finder. Since the platform uses a polar coordinate system, the below coordinate transformation is needed:
where
is the conversion matrix from the camera coordinate system
C to the platform coordinate system
P.
The other conversion processes are similar. Through the above process, the geographic positions of the image center and the four vertices of the image can be mapped to the ECEF coordinate system based on their geographic positions using only us-level operations, as shown in
Figure 5. In the subsequent process, the previous frame image can be used as a reference, and the next frame image to be registered can also be mapped to the coordinate system.
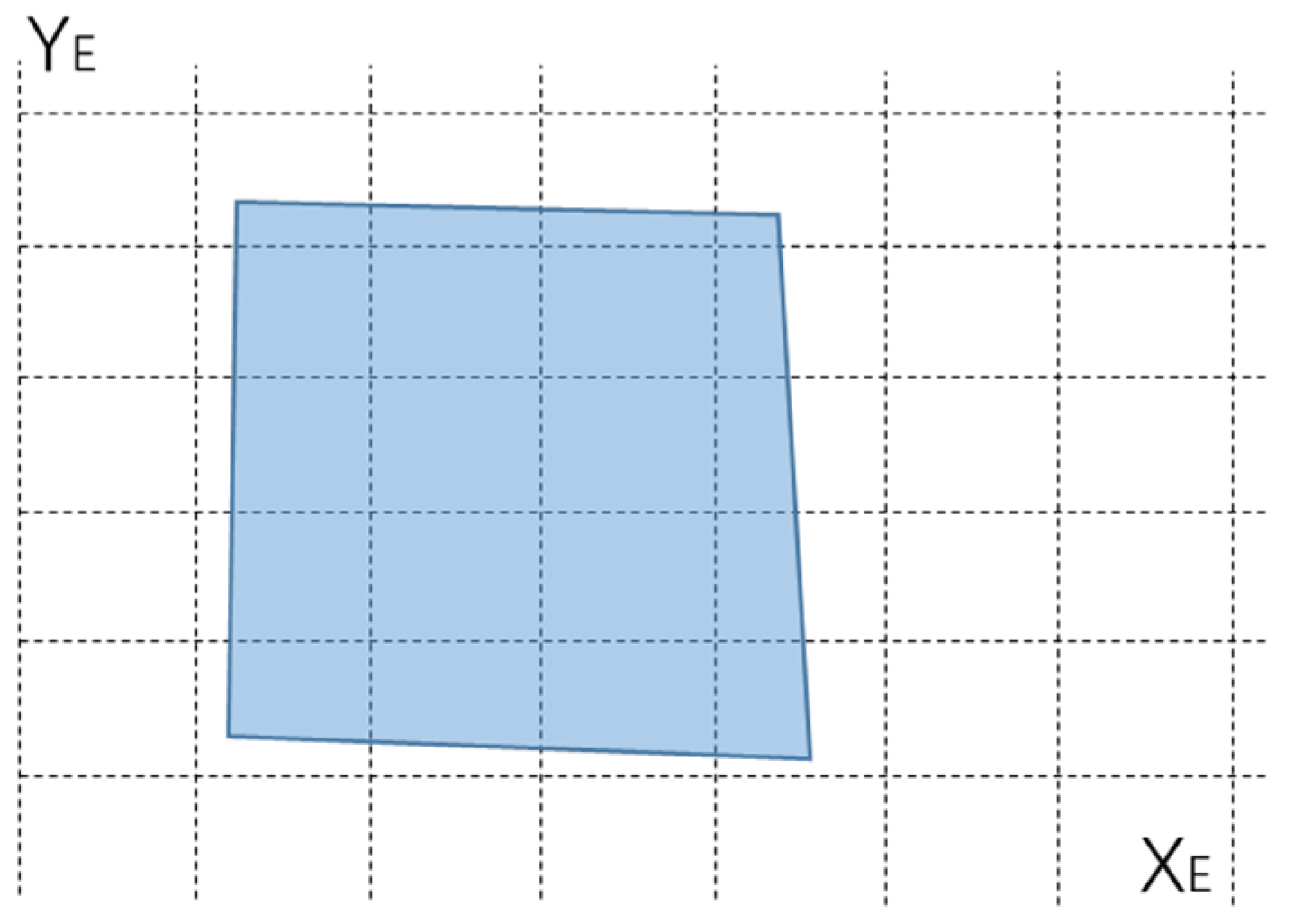
Under a unified coordinate system, the scale between the two images is also unified, which means that the problem of scaling between the two images can be roughly solved and the overlapping area can be determined by the intersecting area, as shown in
Figure 6.
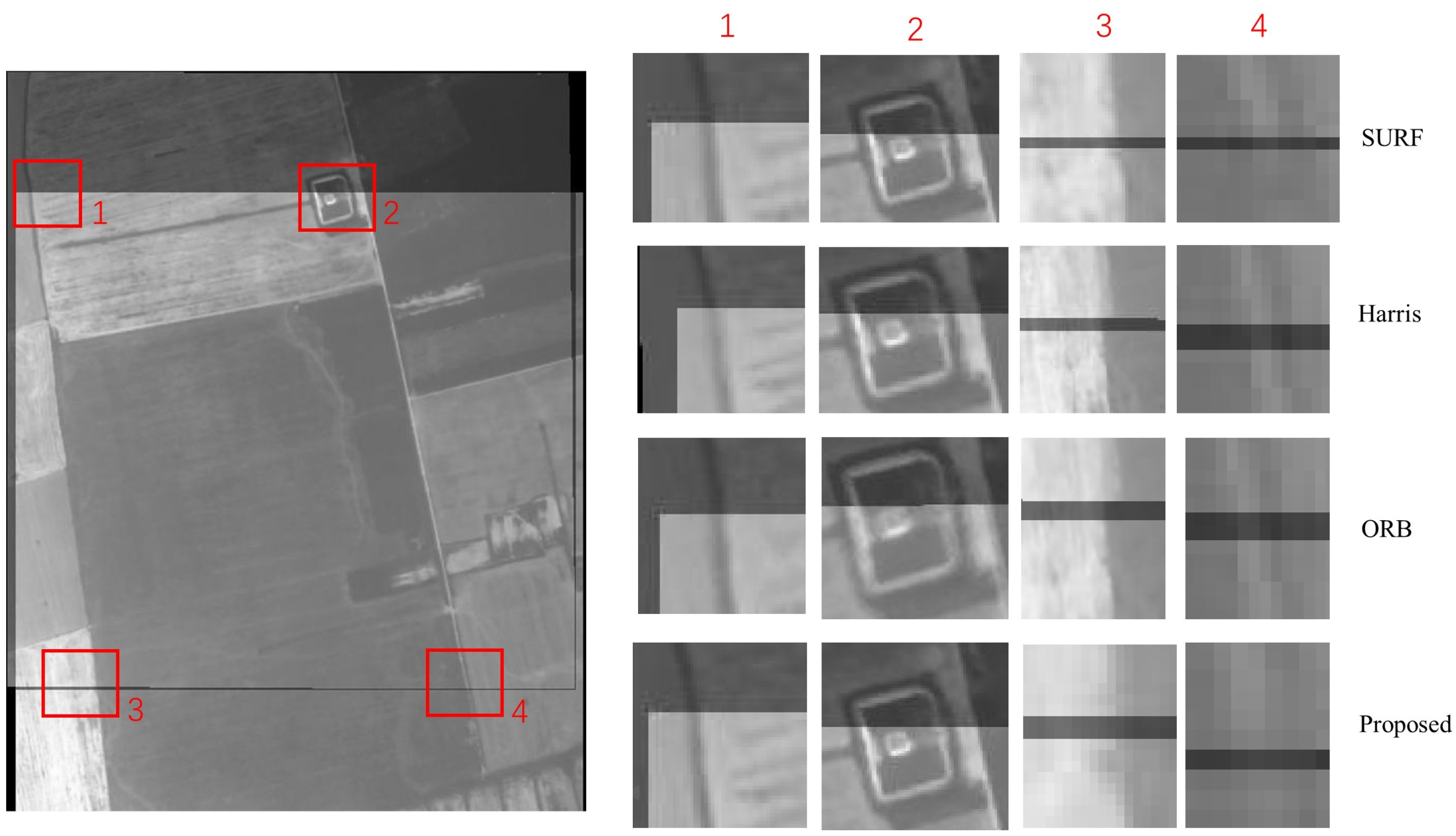
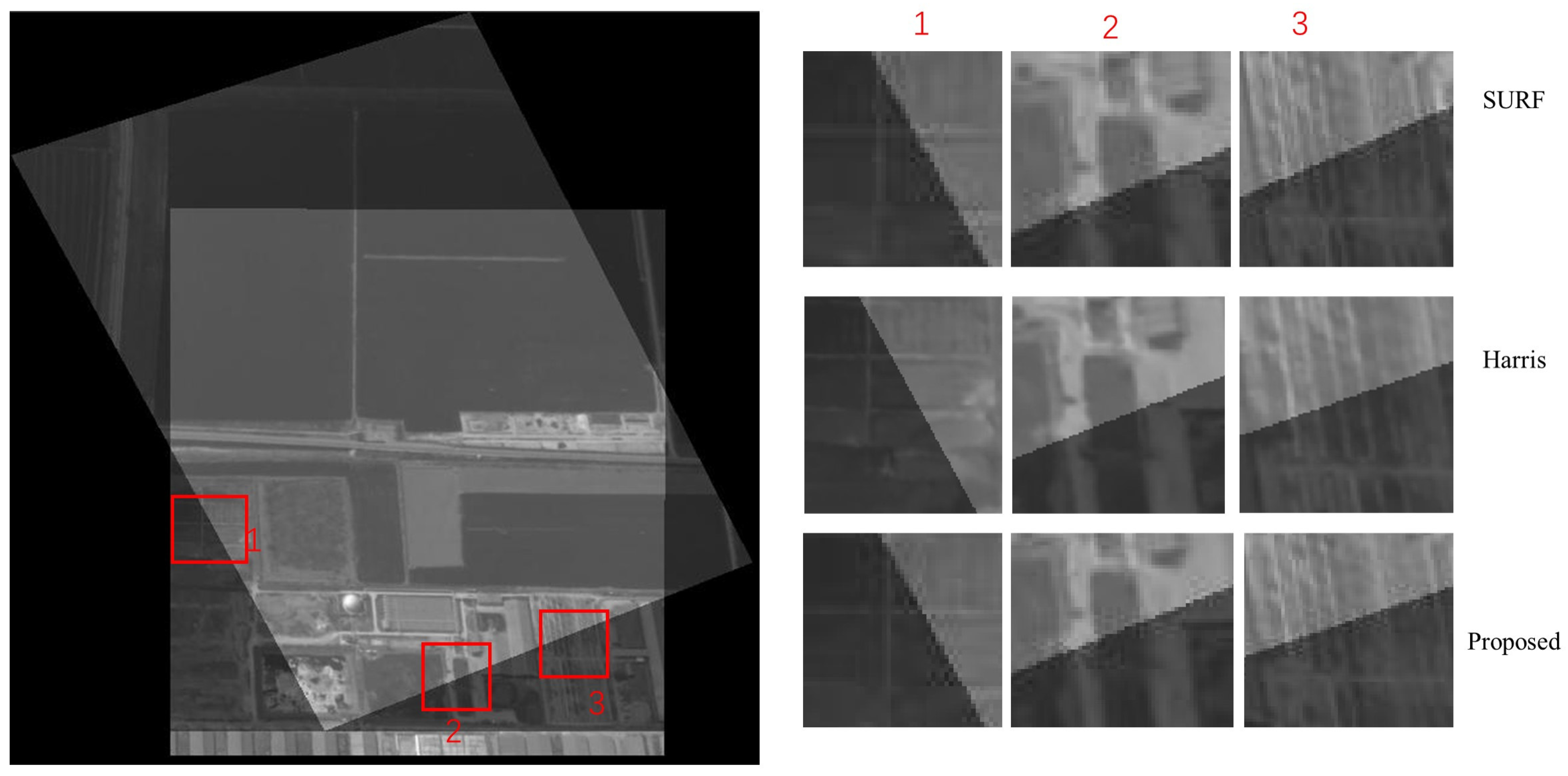
However, due to the influence of transmission errors, measurement errors, and other errors, the results usually have
m-level errors. The corresponding errors on the image are usually more than 5 pixels, but generally do not exceed 200, as shown in
Figure 7. From the figure, it can be seen that there is obvious misalignment in the images after simple overlap. The error needs to be corrected through pixel-level image registration methods.
After coarse registration of images is performed through geographic location mapping, a pixel-level image registration method needs to be adopted to optimize the scale and shift parameters for the subsequent stitching process. At this point, feature point extraction, feature point description, and matching require improvements to meet real-time requirements due to their high computational complexity.
2.3. Improvements in FAST Feature Point Detection Method
The key steps of image registration include feature detection, the generation of feature descriptors, and key point matching. After feature point extraction is completed, it is necessary to construct a descriptor for the feature point so that it has specificity relative to all other feature points in the image; on the other hand, this description method also needs to ensure that the corresponding point of the same name has similarity to another image in order to ensure that the pair of points can form a corresponding relationship between the two images.
For binary feature point descriptors, there are only two forms: 0 and 1. Therefore, the selected sampling method has become one of the key factors determining the effectiveness of descriptors. For example, the BRIEF algorithm and ORB algorithm heavily rely on sampling templates. The BRISK algorithm adopts a relatively fixed sampling mode, but requires secondary sampling after determining the main direction, resulting in a slightly larger computational load. Meanwhile, these description methods do not use information from the extraction process, resulting in a waste of computing resources.
Therefore, even though the current registration method to extract feature points based on FAST is relatively fast, there is still room for improvement. After studying the relationship between FAST feature points and neighborhoods, this article has made specific improvements.
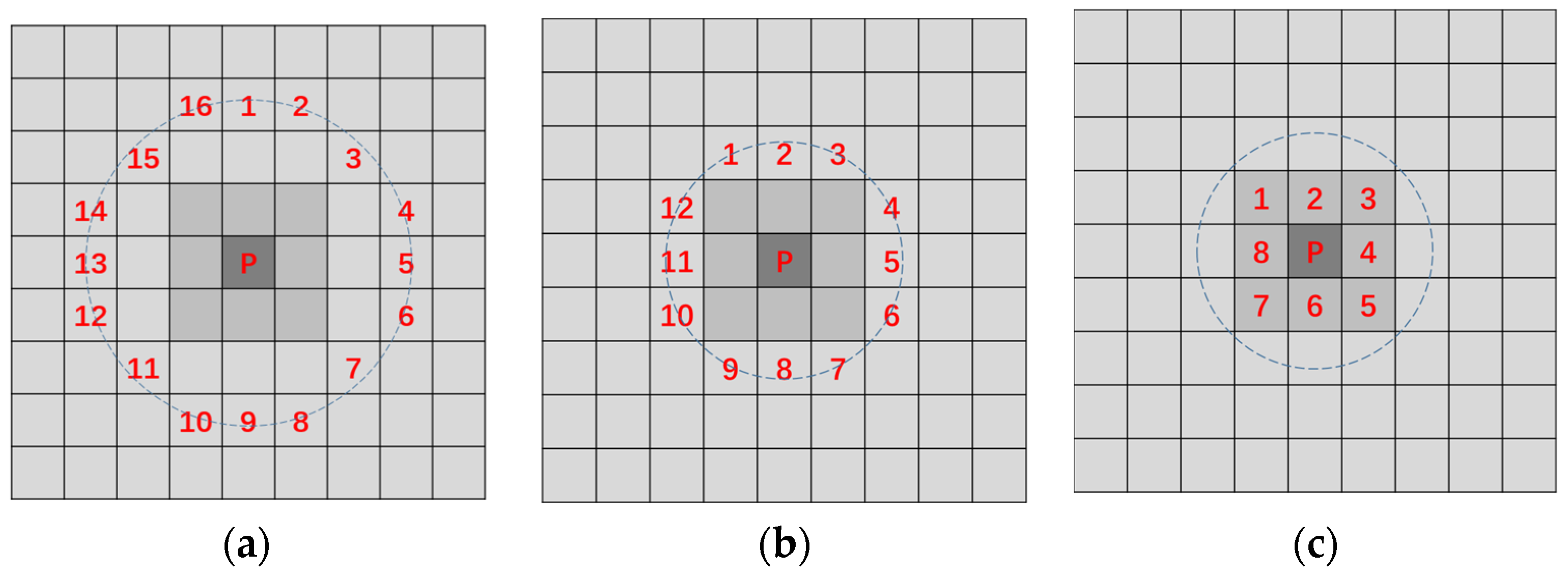
Firstly, when describing and matching feature points, FAST feature points are clearly divided into “bright feature points” and “dark feature points” to represent the relationship between feature points and their neighbors, and the extraction process is recorded. The basis for this improvement is that for homologous aerial images, feature points will not undergo light–dark reversal within a small time interval. Although there may be changes in brightness, the relative relationship will not undergo fundamental changes. Based on the above settings, this article designs a new feature description method. Firstly, a 16-bit binary description vector was added to record the grayscale relationship between the point and its neighborhood, and the accumulation and differentiation of these 16 bits were used to distinguish between the set of bright feature points {B} and the set of dark feature points {D}. This is because, when comparing brightness, if there are 9 consecutive points with grayscale values greater than the threshold of P points, it is proven that P points are dark points. The number of “1” in these 16-bit description vectors should be ≥9, that is, the sum of each bit should be ≥9. Conversely, if the number of 0 values is greater than 9, the sum of each bit should be less than 7, and the extracted feature points are bright points. Based on this, a total of four feature point sets, {B1}, {B2}, {D1}, and {D2}, can be obtained from the two images. When performing feature point matching, the corresponding feature points can be taken for calculation.
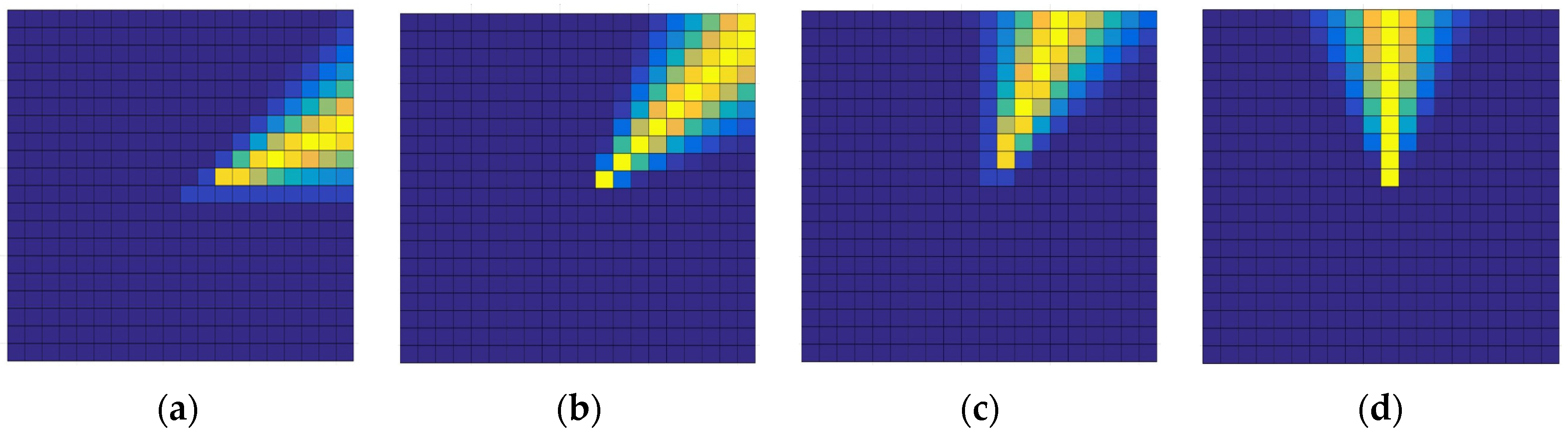
Secondly, based on the number of consecutive neighborhood points that meet the conditions, blob points, lines, and corner points can be distinguished. For FAST with a radius of 3 pixels, if the difference between the 16 detection points and the center point during the extraction process meets the threshold, i.e., all 0 or all 1, it represents that the center point is the extreme value of the region. However, due to advancements in modern sensor technology, the number of pixels in a single image is often over one million, and it is rare for a small object to occupy only one pixel in airborne images. This is reflected in the image array, where at least one point in the surrounding 8 pixels has a small difference in its grayscale, as shown in
Figure 10. It can be seen that an object with a very small actual size occupies two brighter pixels in the image, and four adjacent pixels are also bright. Therefore, for suspected blob points, another FAST detection is performed with a radius of 1. When at least 1 of the surrounding 8 points does not meet the threshold for its grayscale difference, the possibility of the point being noisy can be ruled out, and it can be recognized as a blob point; otherwise, it can be determined to be noisy and removed. When there are 13–15 consecutive points that meet the conditions among the 16 points, it can be considered that the endpoints of some approximately linear objects have been detected. When 9–12 out of 16 points meet the conditions, they can be temporarily designated as corner points. It is worth noting that the preliminarily determined feature points require non-maximum suppression to reduce feature point clustering.
However, after constructing a 16-bit descriptor for feature points based on the extraction process, it still cannot meet the requirement of specificity in the matching process; that is, it cannot guarantee the uniqueness of the description vector for thousands of feature points, so it is necessary to increase the description dimension.
Due to the use of a circular neighborhood for sampling testing during feature point extraction, this method introduces a polar coordinate system description method. The method generates a sampling template based on an angle diffusion model and a circular neighborhood, which divides the circumference of a feature point into several regions according to the angle. Weighted variable region sampling is then performed on the sector neighborhood of the feature point to generate a feature point descriptor. This is referred to as the Weighted Angular Diffusion Radial Sampling (WADRS) method in this article. This model can to some extent solve the feature changes in sequence images caused by frequent changes in external conditions.
The specific methods are as follows:
Firstly, based on the size of the sampling template, the range normalization is set to ±0.5 for the X and Y matrices; for example, when the template is
n ×
n,
where
n is set to 21.
This matrix corresponds to an angle matrix
, where the elements of the matrix
are
When the sampling angle is
, the difference between sine and cosine is calculated separately, i.e.,
and at this point, the angular distance is
Then, the angle diffusion model of the Gaussian kernel can be obtained:
Here, .
The circumference is evenly divided into 2 × K sampling intervals, and is the ratio of the angular interval between filter orientations and the standard deviation of the angular Gaussian function used to construct filters in the frequency plane.
The sampling template obtained from this is shown in
Figure 11a, with a size of 21 × 21 and a sampling angle of 22.5°. Different colors represent different weights. This means that the circumference is divided into 16 angle intervals, corresponding to the 16 sampling directions during FAST feature point extraction. The weight values of each position within the sampling angle are shown in
Figure 11b.
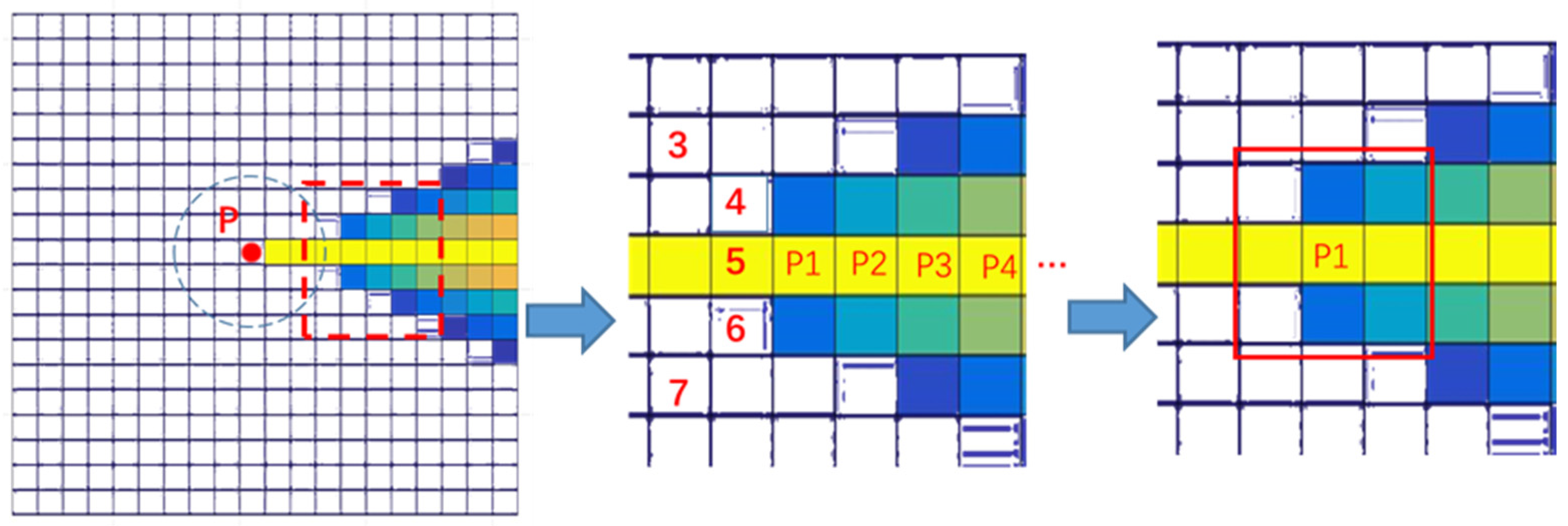
Based on the premise that the target occupies multiple pixels as described earlier, the 7 × 7 neighborhood with a radius of 3 centered on the feature point is no longer sampled, but is instead sampled radially outward. The center of the circle (feature point, red point
P in
Figure 12) is divided outward into m small sampling intervals based on different radii, and the values of the sampling template are used as weights for weighted and normalized brightness testing, as shown in
Figure 12.
The value of the small sampling interval centered on
P1 is
Ip1Here,
is the value of the sampling template in the 3 × 3 neighborhood where point P1 is located. That is, when point P1 is taken as the center of the small sampling interval, the brightness values of 9 pixels in its 3 × 3 area are multiplied and summed with the sampling template, and then normalized. The obtained IP1 can be compared with the brightness Ip of feature point
P, thus obtaining a binary comparison result. By extrapolating along the radial direction in sequence, an l-bit binary descriptor can be obtained. It should be noted that when the sampling angle changes, interpolation methods need to be used to resolve the situation where the sampling interval is not at the center of the pixel. According to different needs, simple rounding can be used to form a sampling template to accelerate the calculation speed, as shown in
Figure 13. In addition, due to the independence of each sampling interval, 16 angle intervals can be simultaneously sampled through parallel computing to improve the speed of descriptor construction.
Based on this, the feature point description method designed in this article is as follows: firstly, a 16-bit circular neighborhood feature S is added, and 7 brightness test results within 16 angle intervals are recorded in binary form. Therefore, the descriptor for each feature point is a 128-bit binary vector.
As the images are mapped using geographic information, the directions in the two images are largely consistent. Due to the size of the sampling template, the angular error in the geographic information is not sufficient to cause sampling errors.
2.4. Matching of Feature Point Descriptors
Due to the small error in the calculation results of geographic information, the search range can be defined based on the position of feature points in the ECEF coordinate system before descriptor matching is performed. Usually, during the matching stage of feature point binary descriptors, Hamming distance is used to evaluate the similarity between descriptors.
The Hamming distance represents the number of different bits corresponding to two code strings of the same length. XOR is performed on two strings and the number of results is counted as 1. The number of 1 represents the Hamming distance between two strings. The calculation formula is shown in Equation (10).
Based on the modification of FAST in this article, when matching feature points in two images, there is no need for brute-force matching, but a tree search method is used instead to improve efficiency. Firstly, based on whether the feature points come from {D} or {B}, they are assigned to the corresponding subset and then further divided into smaller subsets based on the absolute value of the ring neighborhood feature S. In theory, when calculating the Hamming distances of the circular neighborhood features S1 and S2 from two feature points in two images, the two feature points with the smallest distance are most likely to be points with the same name. Therefore, sorting can be based on the Hamming distance between S vectors first. Usually, due to perspective projection in aerial images, the change in neighborhood features does not exceed one quadrant, so the Hamming distance between S vectors usually does not exceed 4. Due to using only a 16-bit S vector for the initial sorting, the filtering speed is fast and the efficiency is high. When the Hamming distance of the S vector meets the condition, the Hamming distance between the remaining 16 × 7 bits is calculated to complete the matching.
The relative position relationship of feature points can be determined based on geographic information, so it can eliminate mismatched points that are significantly out of the tolerance range more effectively than the Random Sample Consensus (RANSAC) method, thereby ensuring the accuracy of registration.
After feature point matching is completed, an accurate image transformation model can be calculated to complete image registration, laying a solid foundation for subsequent processing processes such as stitching and fusion. However, it is worth noting that if the imaging distance is not far enough and there are objects with significant height differences in the image, the projection directions of taller objects in the two images may be inconsistent due to parallax. Therefore, it is necessary to find ways to eliminate stitching marks during the subsequent stitching process.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}