
Wideband Direction-of-Arrival Estimation Based on Hierarchical Sparse Bayesian Learning for Signals with the Same or Different Frequency Bands

Abstract
:1. Introduction
2. Signal Model Establishment
3. Proposed Method
3.1. Bayesian Criteria
3.2. Proposed Method
| Algorithm 1. Summary of the proposed algorithm |
| Input:, , , , , and i = 0 |
| Do Update and using Equation (16). Update and via Equations (20) and (23), respectively. Update and via Equations (25) and (27), respectively. Compute and using Equations (29) and (31), respectively. i = i + 1 while and |
| Output: |
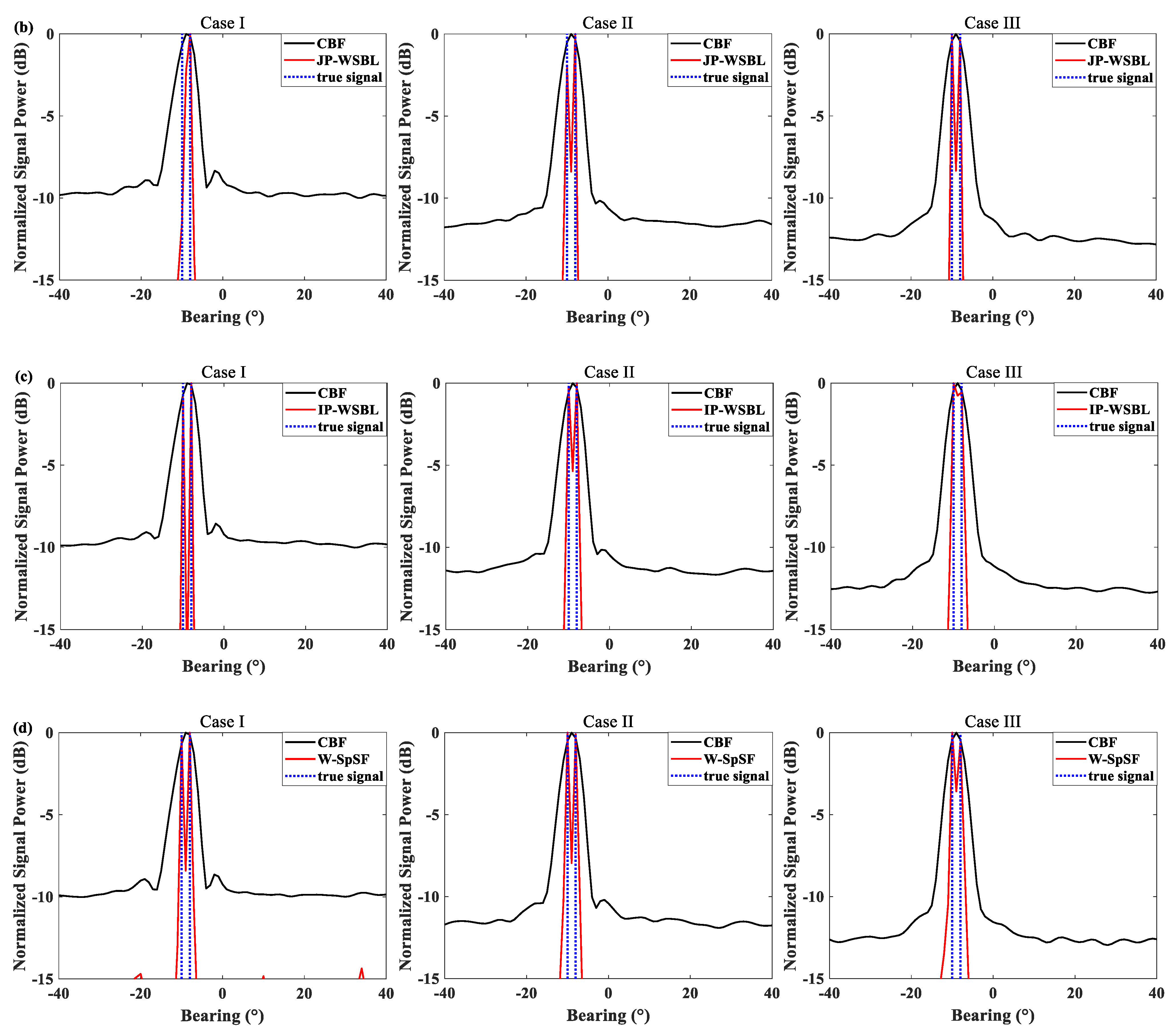
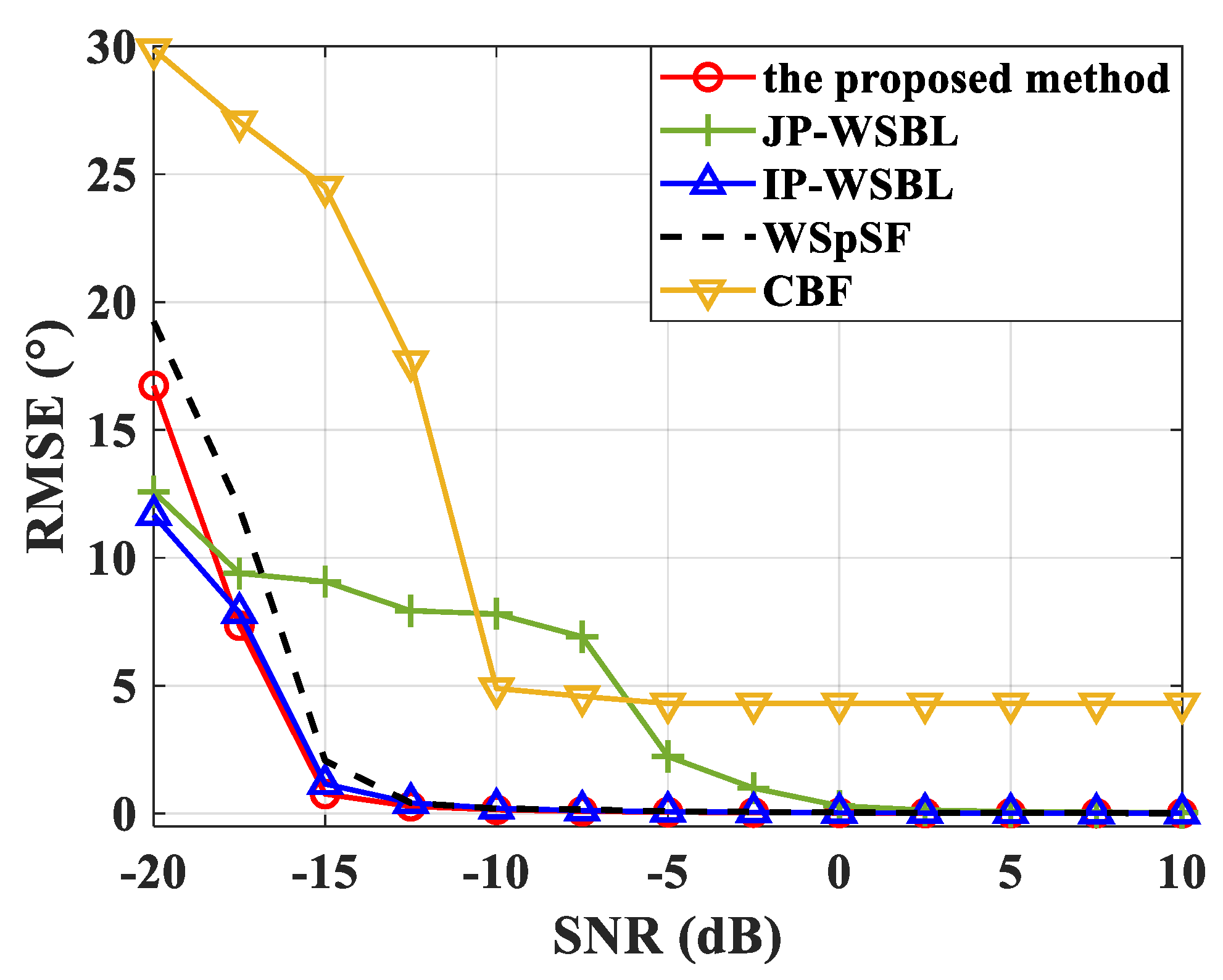
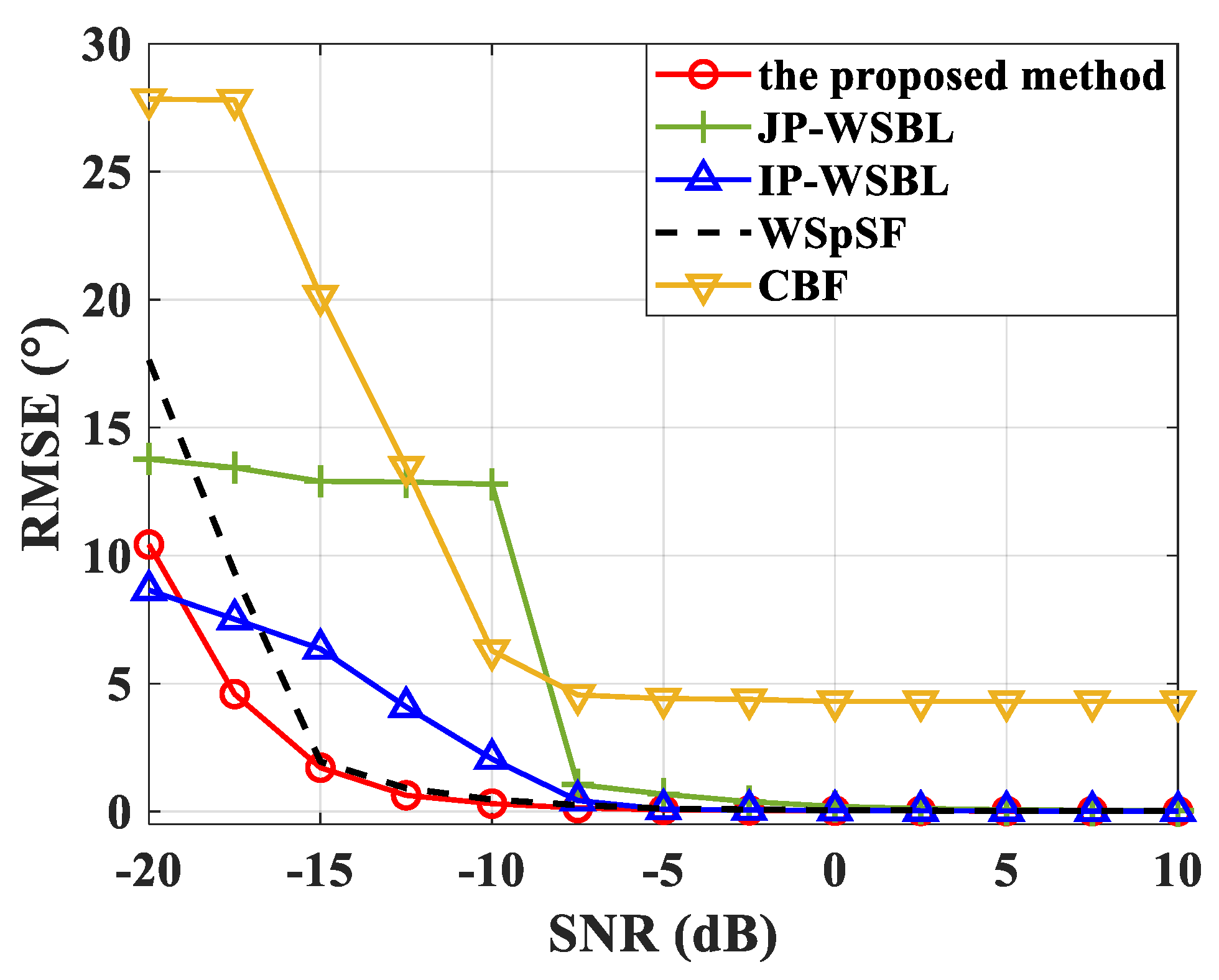
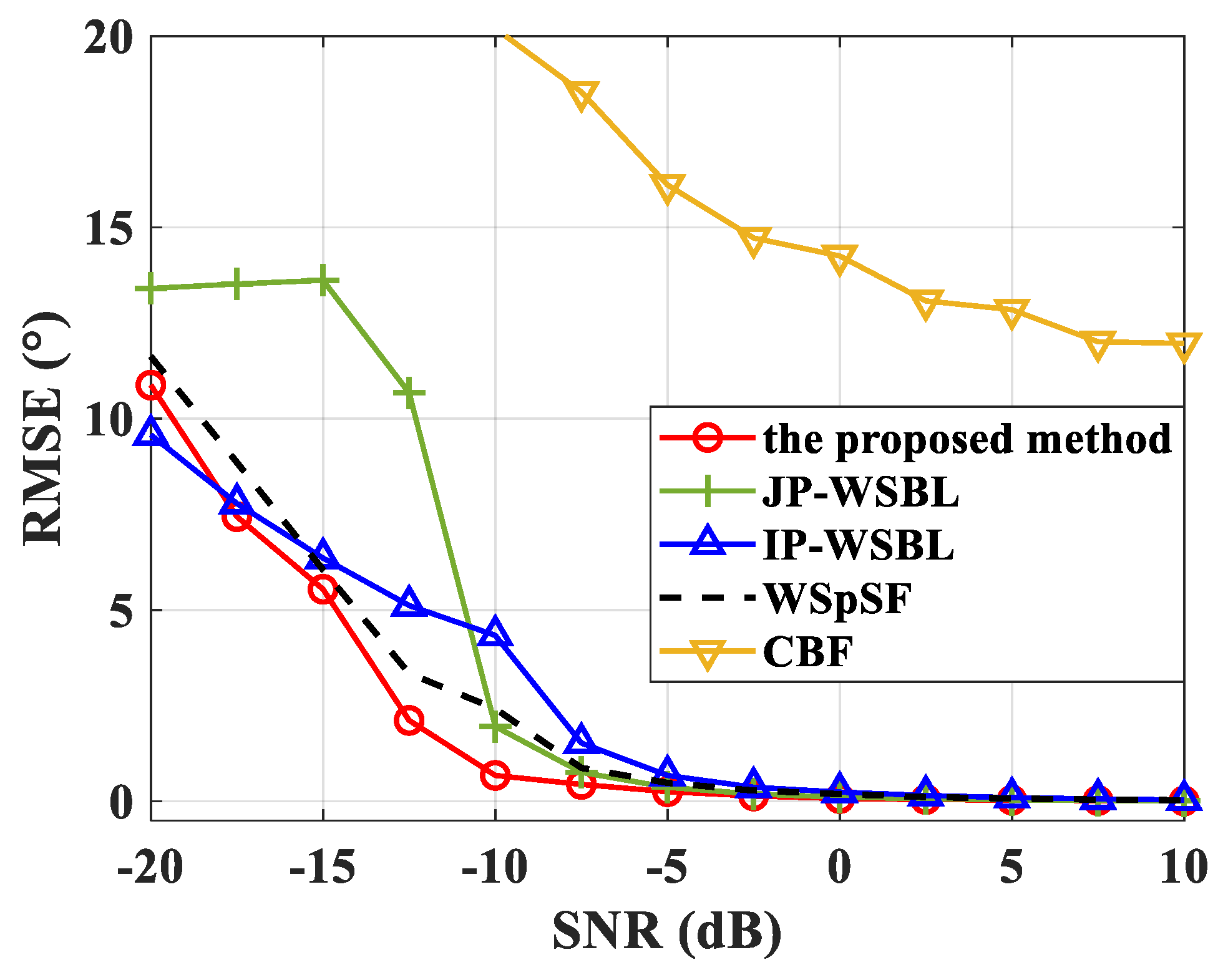
4. Simulation Results
- (1)
- Case I: Signal1: [90, 134] Hz, Signal2: [136, 180] Hz. The bandwidth of signals is 44 Hz;
- (2)
- Case II: Signal1: [90, 160] Hz, Signal2: [110, 180] Hz. The bandwidth of signals is 70 Hz;
- (3)
- Case III: Signal1: [90, 180] Hz, Signal2: [90, 180] Hz. The bandwidth of signals is 90 Hz.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Johnson, D.H.; Degraaf, S.R. Improving the resolution of bearing in passive sonar arrays by eigenvalue analysis. IEEE Trans. Acoust. Speech Signal Process. 1982, 30, 638–647. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.; Ge, F.; Guo, X.; Guo, L. Eigenanalysis-based adaptive interference suppression and its application in acoustic source range estimation. IEEE J. Ocean. Eng. 2015, 40, 903–916. [Google Scholar] [CrossRef]
- Gerstoft, P.; Xenaki, A.; Mecklenbräuker, C.F. Multiple and single snapshot compressive beamforming. J. Acoust. Soc. Am. 2015, 138, 2003–2014. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, J.; Kaveh, M. Sparse spatial spectral estimation: A covariance fitting algorithm, performance and regularization. IEEE Trans. Signal Process. 2013, 61, 2767–2777. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Wen, C.; Xie, X.; Shi, G. Off-grid DOA estimation under nonuniform noise via variational sparse Bayesian learning. Signal Process. 2017, 137, 69–79. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Yang, L.; Guo, X. Root sparse asymptotic minimum variance for off-grid direction-of-arrival estimation. Signal Process. 2019, 163, 225–231. [Google Scholar] [CrossRef]
- Chen, P.; Chen, Z.; Zhang, X.; Liu, L. SBL-based direction finding method with imperfect array. Electronics 2018, 7, 426. [Google Scholar] [CrossRef] [Green Version]
- Ling, Y.; Gao, H.; Ru, G.; Chen, H.; Li, B.; Cao, T. Grid reconfiguration method for off-grid DOA estimation. Electronics 2019, 8, 1209. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Rao, B.D.; Hari, K.V.S. Performance analysis of root-MUSIC. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1939–1949. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Yang, J.; Liao, G.; Li, J. An efficient off-grid DOA estimation approach for nested array signal processing by using sparse Bayesian learning strategies. Signal Process. 2016, 128, 110–122. [Google Scholar] [CrossRef]
- Huang, M.; Huang, L. Sparse recovery assisted DOA estimation utilizing sparse Bayesian learning. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar]
- Li, S.; Xie, D. Compressed symmetric nested arrays and their application for direction-of-arrival estimation of near-field sources. Sensors 2016, 16, 1939. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Viberg, M. Two decades of array signal parameter estimation. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar]
- Wang, H.; Kaveh, M. Coherent signal-subspace processing for the detection and estimation of angles of arrival of multiple wideband sources. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 823–831. [Google Scholar] [CrossRef] [Green Version]
- Hung, H.; Kaveh, M. Focussing matrices for coherent signal-subspace processing. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 1272–1281. [Google Scholar] [CrossRef]
- Valaee, S.; Kabal, P. Wideband array processing using a two-sided correlation transformation. IEEE Trans. Signal Process. 1995, 43, 160–172. [Google Scholar] [CrossRef] [Green Version]
- Sellone, F. Robust auto-focusing wideband DOA estimation. Signal Process. 2006, 86, 17–37. [Google Scholar] [CrossRef]
- He, Z.; Shi, Z.; Huang, L.; So, H.C. Underdetermined DOA estimation for wideband signals using robust sparse covariance fitting. IEEE Signal Process. Lett. 2015, 22, 435–439. [Google Scholar] [CrossRef]
- Das, A.; Sejnowski, T.J. Narrowband and wideband off-grid direction-of-arrival estimation via sparse Bayesian learning. IEEE J. Ocean. Eng. 2018, 43, 108–118. [Google Scholar] [CrossRef]
- Das, A. Real-valued sparse Bayesian learning for off-grid direction-of-arrival (DOA) estimation in ocean acoustics. IEEE J. Ocean. Eng. 2021, 46, 172–182. [Google Scholar] [CrossRef]
- Jiang, Y.; He, M.; Liu, W.; Feng, M. Underdetermined wideband DOA estimation for off-grid targets: A computationally efficient sparse Bayesian learning approach. IET Radar Sonar Navig. 2020, 14, 1583–1591. [Google Scholar] [CrossRef]
- Hu, N.; Sun, B.; Zhang, Y.; Dai, J.; Wang, J.; Chang, C. Underdetermined DOA estimation method for wideband signals using joint nonnegative sparse Bayesian leaning. IEEE Signal Process. Lett. 2017, 24, 535–539. [Google Scholar] [CrossRef]
- Tzikas, D.G.; Likas, A.C.; Galatsanos, N.P. The variational approximation for Bayesian inference. IEEE Signal Process. Mag. 2008, 25, 131–146. [Google Scholar] [CrossRef]
- Themelis, K.E.; Rontogiannis, A.A.; Koutroumbas, K.D. A variational Bayes framework for sparse adaptive estimation. IEEE Trans. Signal Process. 2014, 62, 4723–4736. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Yang, Y.; Lu, J. A variational Bayesian strategy for solving the DOA estimation problem in sparse array. Digit. Signal Process. 2019, 90, 28–35. [Google Scholar] [CrossRef]
- Yang, L.; Fang, J.; Cheng, H.; Li, H. Sparse Bayesian dictionary learning with a Gaussian hierarchical model. Signal Process. 2017, 130, 93–104. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Hou, X.; Yang, Y. Self-calibration for sparse uniform linear arrays with unknown direction-dependent sensor phase by deploying an individual standard sensor. Electronics 2023, 12, 60. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case I | Case II | Case III | |
|---|---|---|---|
| the proposed method | 6.07 s | 9.73 s | 11.15 s |
| JP-WSBL | 8.30 s | 11.76 s | 12.36 s |
| IP-WSBL | 7.56 s | 10.88 s | 12.65 s |
| W-SpSF | 26.49 s | 26.28 s | 27.14 s |
| CBF | 0.02 s | 0.02 s | 0.02 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Zhang, Y.; Yang, L.; Wang, Y. Wideband Direction-of-Arrival Estimation Based on Hierarchical Sparse Bayesian Learning for Signals with the Same or Different Frequency Bands. Electronics 2023, 12, 1123. https://doi.org/10.3390/electronics12051123
Yang Y, Zhang Y, Yang L, Wang Y. Wideband Direction-of-Arrival Estimation Based on Hierarchical Sparse Bayesian Learning for Signals with the Same or Different Frequency Bands. Electronics. 2023; 12(5):1123. https://doi.org/10.3390/electronics12051123
Chicago/Turabian StyleYang, Yixin, Yahao Zhang, Long Yang, and Yong Wang. 2023. "Wideband Direction-of-Arrival Estimation Based on Hierarchical Sparse Bayesian Learning for Signals with the Same or Different Frequency Bands" Electronics 12, no. 5: 1123. https://doi.org/10.3390/electronics12051123