In this session, we present a procedure for high-level programming of a DSP (Digital Signal Processor) using SHIL and DHIL Simulations. The HIL based method simulation is a technique that mixes both virtual and real elements. Currently, this technique is often used to test embedded control systems, where both the hardware and system software are tested. Also, we can verify the control and the system operations without the need of a physical circuit.
Besides the independence of the physical prototype, the proposed methodology has other advantages:
3.1. SHIL
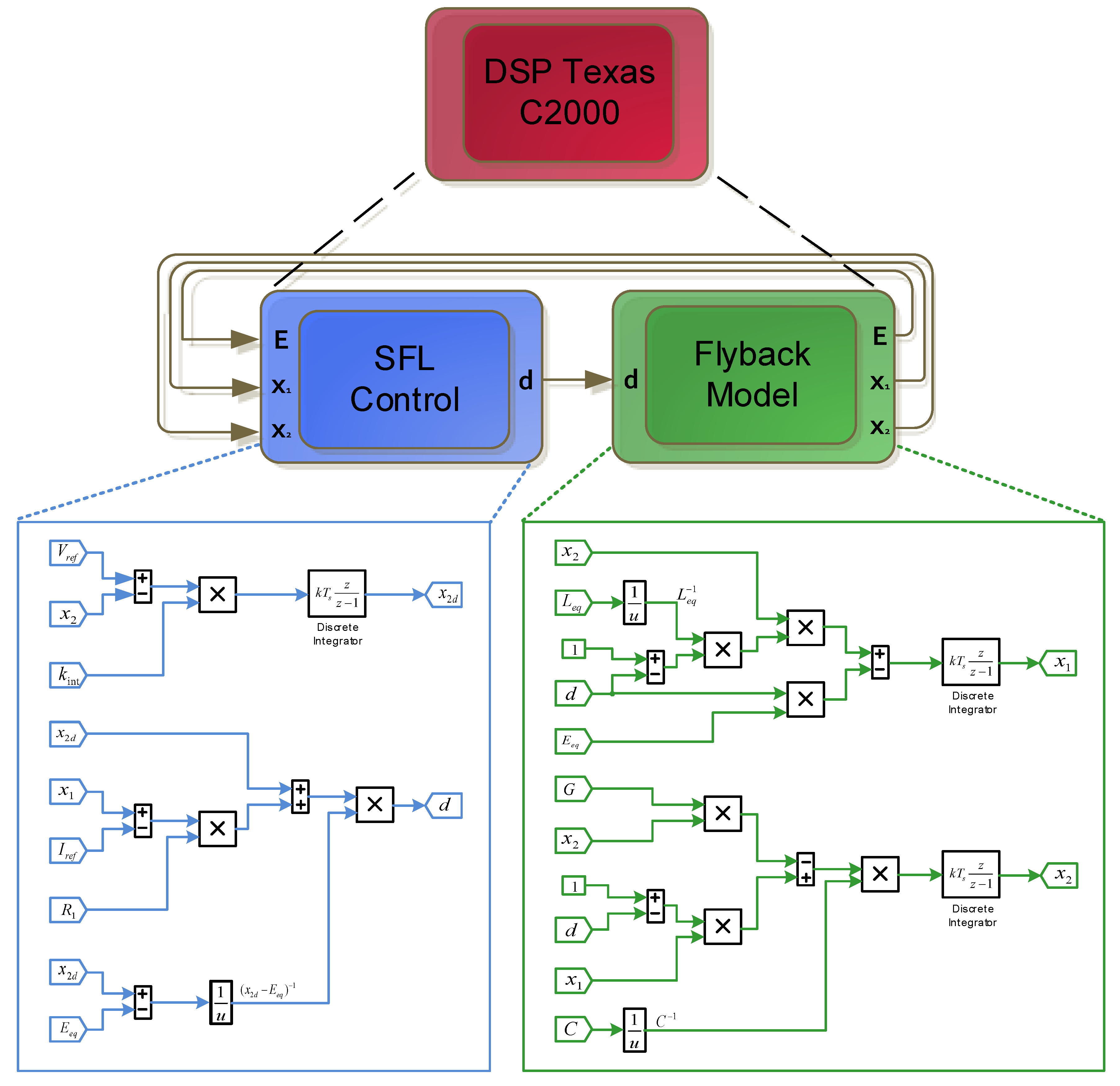
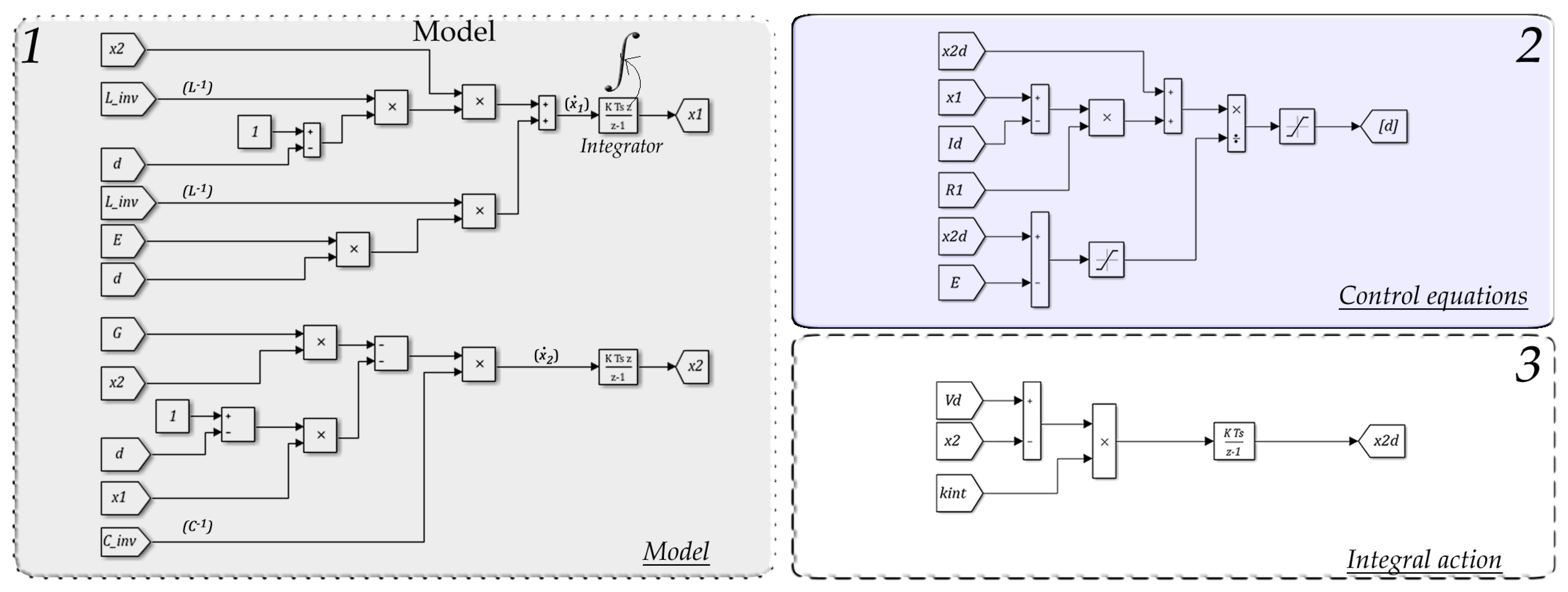
Figure 4 shows the overview of SHIL proposed methodology. The first step is obtaining the plant and the control equation models. After that, such models can be simulated using commonly softwares as Matlab or PSIM. As an example,
Figure 4 illustrates the Flyback’s converter model and the SFL control equations, designed with Matlab/Simulink tools.
Figure 5 shows the simulation in PSIM software. After the implementation, it is necessary to run the simulation and verify if the control and state variables are converging to the desired state. Once this is achieved, the next step is to embed the simulated system in the DSP. By using the
external mode of Simulink and a compiler for the DSP, the model will be converted in code and then embedded to the target. Finally, the target will run the code, emulating the converter and control models. It is possible to verify desired signals in an oscilloscope by programming the DSP pins through DAC (Digital Analog Converter) blocks available in the
package. An important detail is the need of a scale adjustment for voltage compatibility between the simulation and target.
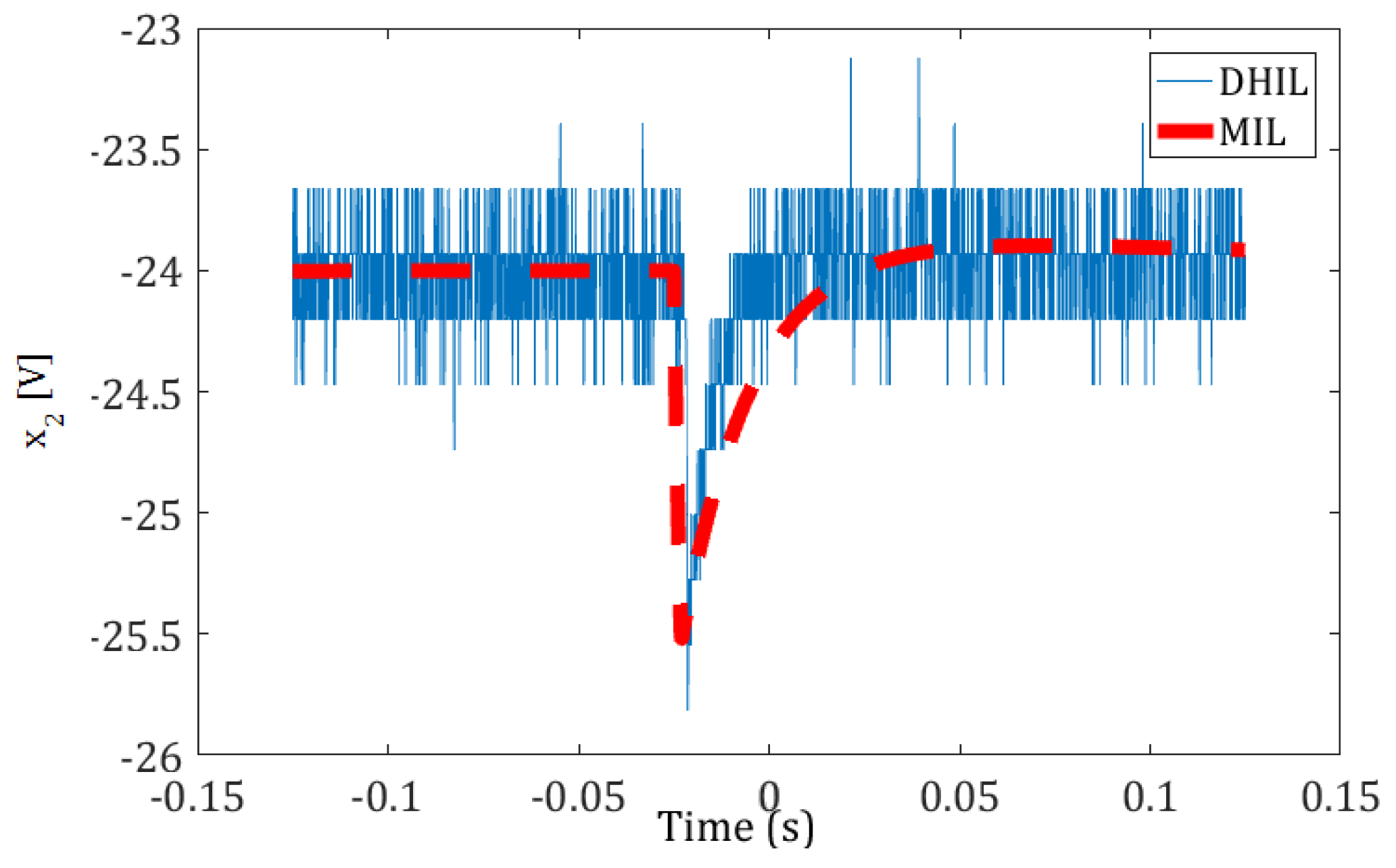
3.2. DHIL
With the proposed SHIL and DHIL methodologies, we can easily test the control law without needing a desktop computer or a real plant. In SHIL, the data transfer occurs directly and faster when both model and control are inserted in the same Digital Signal Processor. However, DHIL is best suited for synchronization, measurement and data communication tests between different systems.
The supporting package for C2000 microcontrollers available in Matlab/Simulink can be found in the Simulink library. Basic information about block functions, simulation configurations for real-time simulation or external mode and examples of systems implementation using the fundamental blocks such as PWM, ADC, DAC and interruptions can be found in Mathworks [
33] website, or in Matlab “Help” area. Once selected, a list of C2000 DSP family will be displayed. By choosing the corresponding DSP, available blocks for the microcontroller are displayed. it is possible to build block systems with other Simulink blocks, by simply dragging them to the model window.
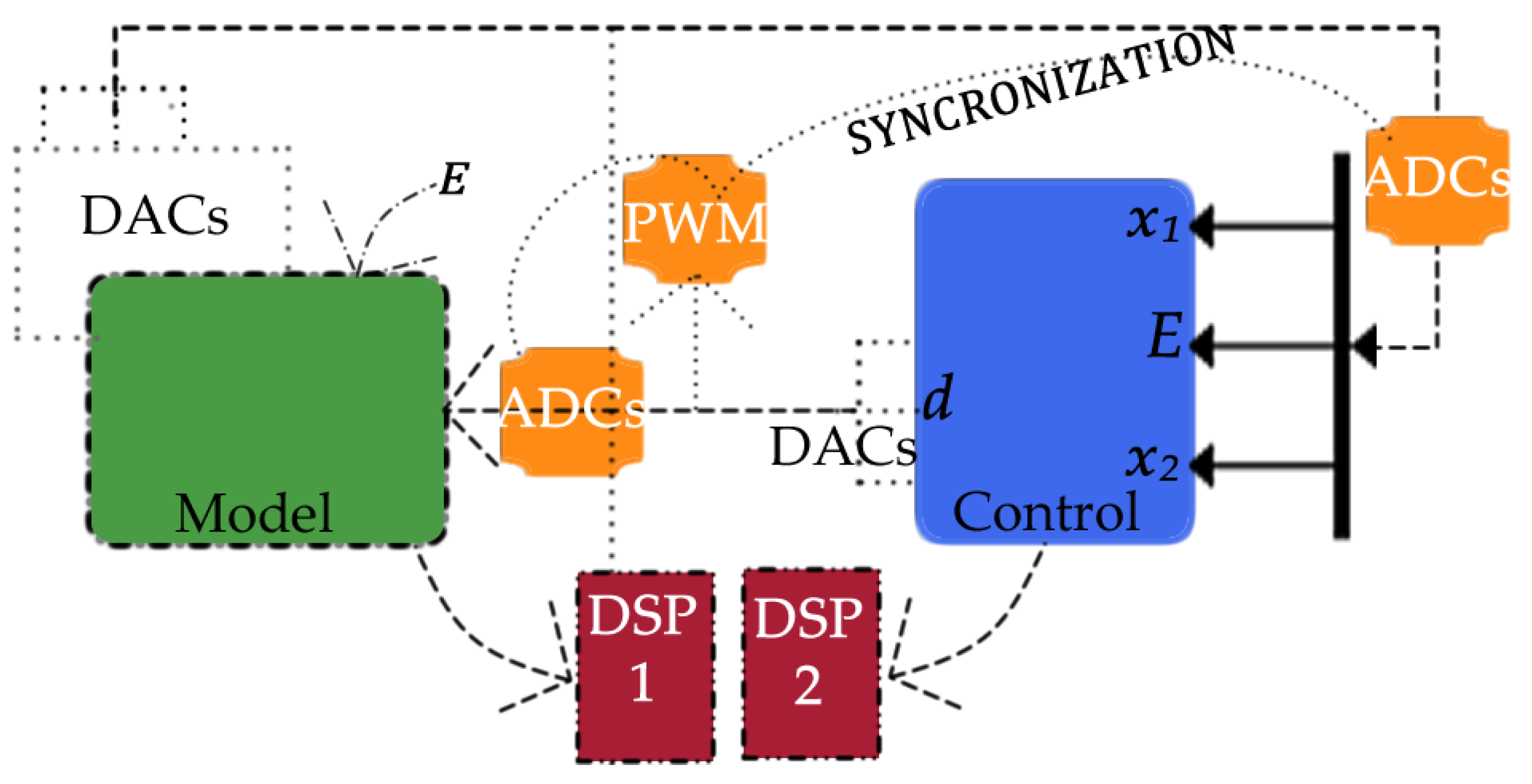
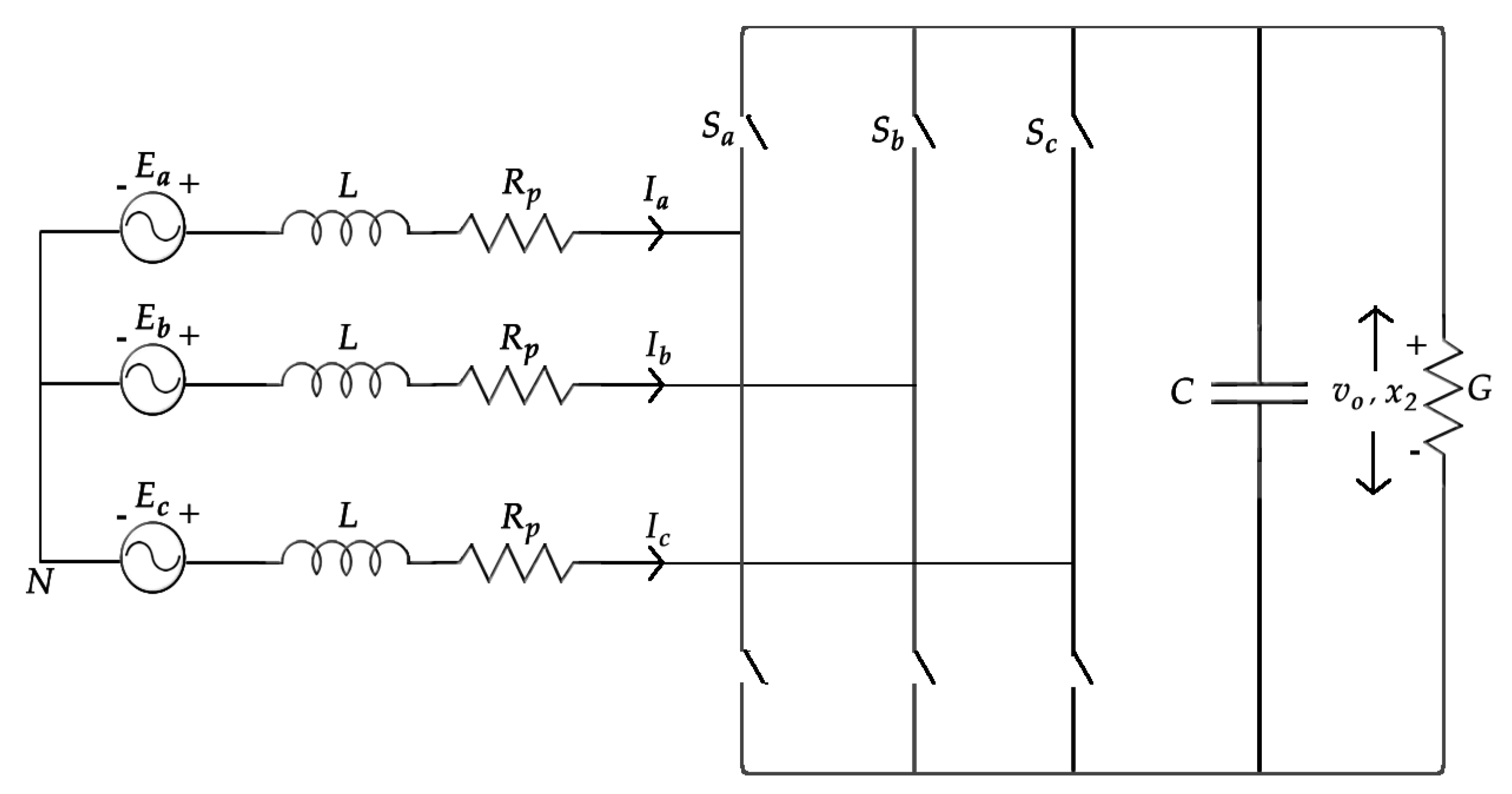
In DHIL, the use of a PWM (Pulse Width Modulation) block is necessary in order to control the converter switching sequence and also to synchronize 3 ADCs (Analog Digital Converter) available for measuring the inductor current (
), capacitor voltage (
) and the input voltage
E. As seen in
Figure 6, the control laws and the converter model are embedded in different microcontrollers. For computing the control laws, the inputs of the model are (
), (
) and
E. Since those inputs are originated from the converter model computation—configured as analog signals type—it is necessary to convert those signals to a digital one, through analog-digital converter (ADC). After conversion, the output of the control law is the duty cycle. Since this control variable is digital, it will be converted to analog (DAC), for reading in the ADC of the DSP embedded with the converter model. For closing the loop, the variables (
), (
) and
E are calculated and consequently converted from digital to analog type. It is important to notice that the conversions are based on the PWM sample rate, then requires the synchronization between both DSPs for a correct computation of control laws and converter model.
3.3. Details of the Implementation
Also, the approach used for programming the microcontroller diverges from the conventional one, being unnecessary the development of code lines. By using code generation tools and software libraries it is possible to resort the implementation of converter models and controllers through Matlab/Simulink blocks. The evident advantages of this approach are the clear visualization of the programming process and the time spared for development.
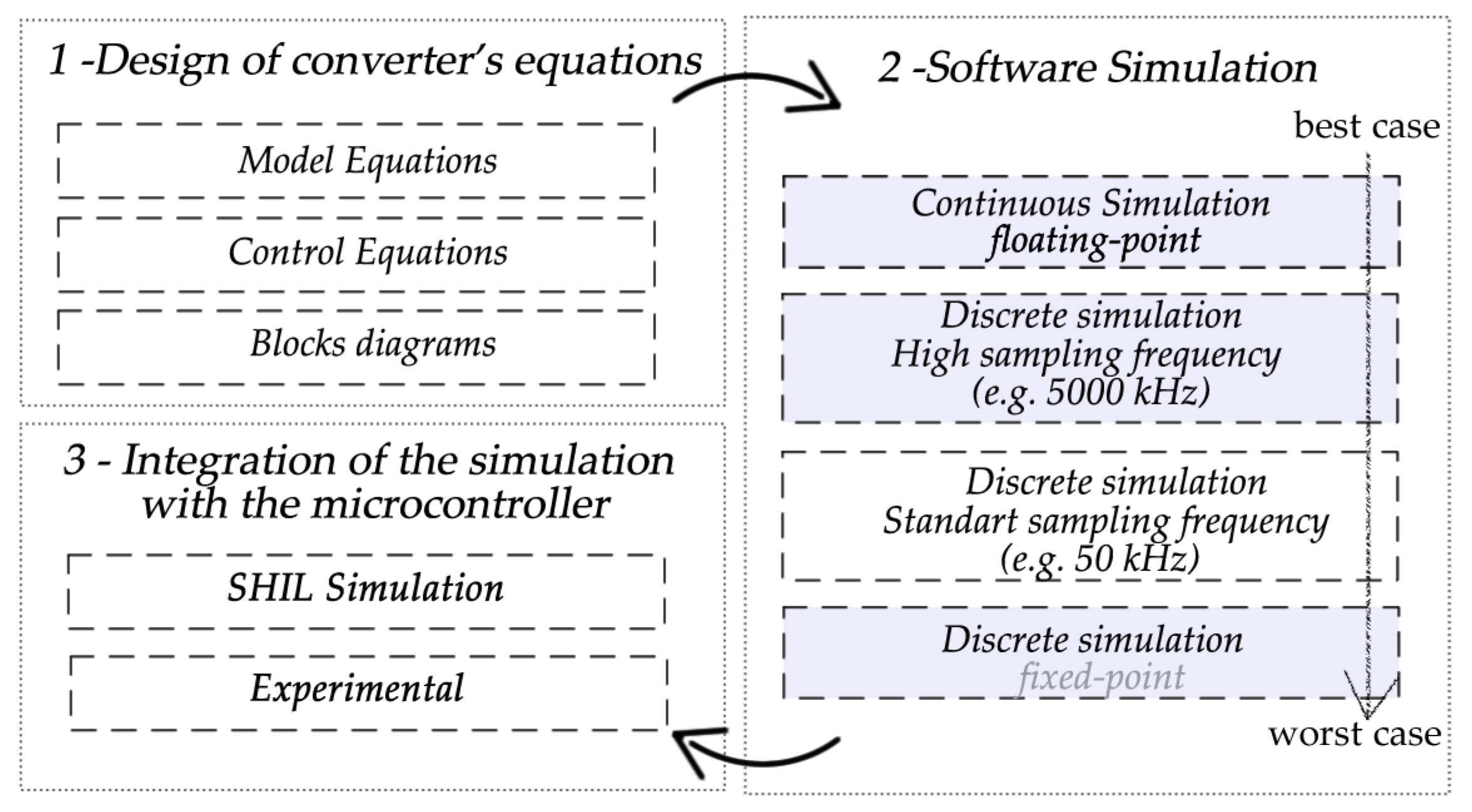
Figure 7 illustrates the proposed steps for this methodology.
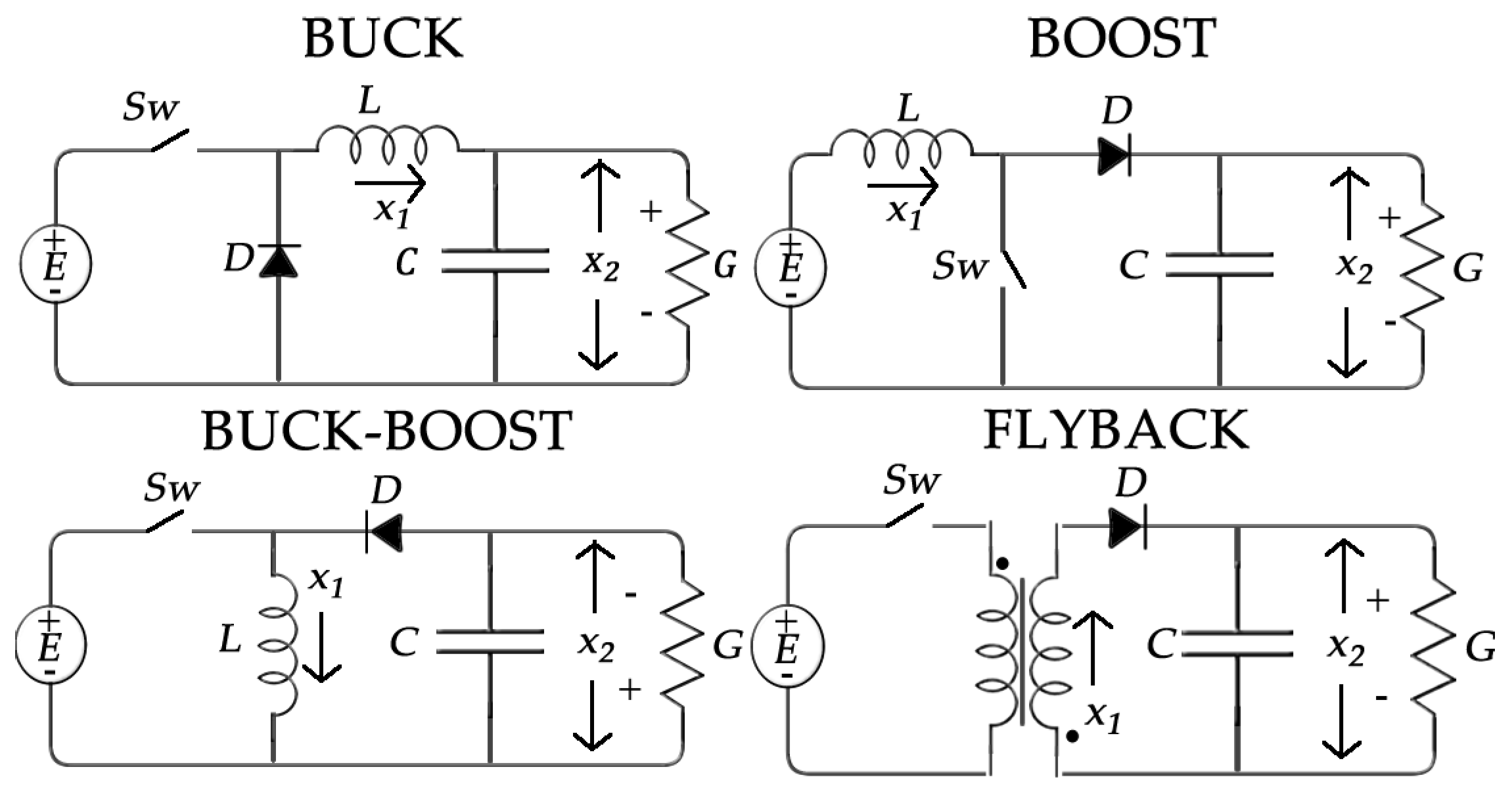
The first stage consists in developing an equation model for the system, demonstrating the relation between the state and control variables. It is up to the user to consider or not the nonlinearities of the system. Next, it is necessary to choose a control technique for actuating in the variable of interest. The nature of the control technique is wide, and can include since classical techniques, as PID controllers, to nonlinear control approaches. This stage ends with the implementation of the model and control equations in the simulation software.
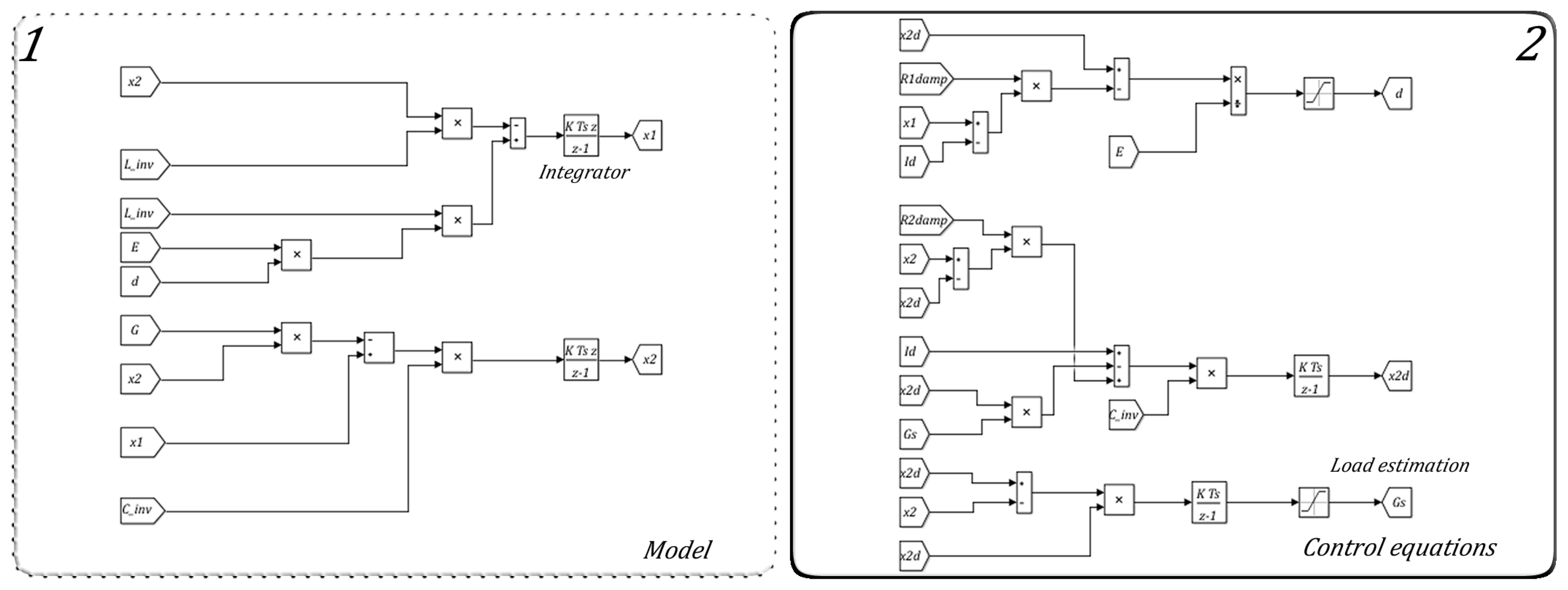
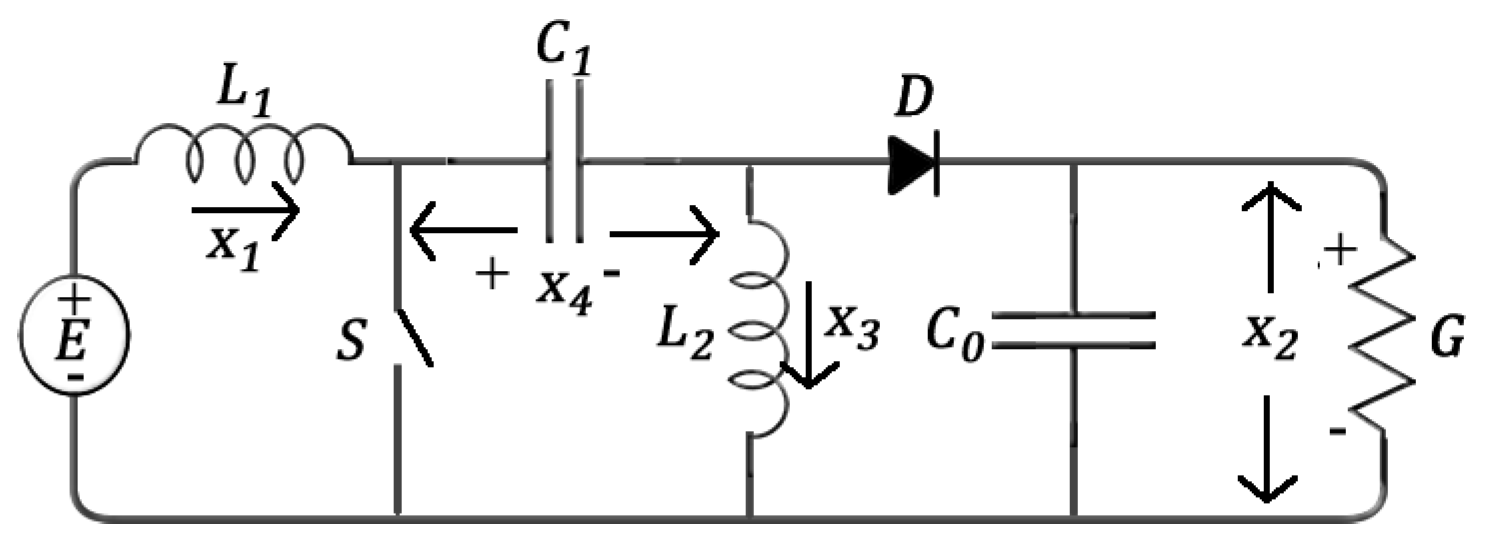
Figure 8 presents the implemented model and control equations of a buck-boost converter, as an example.
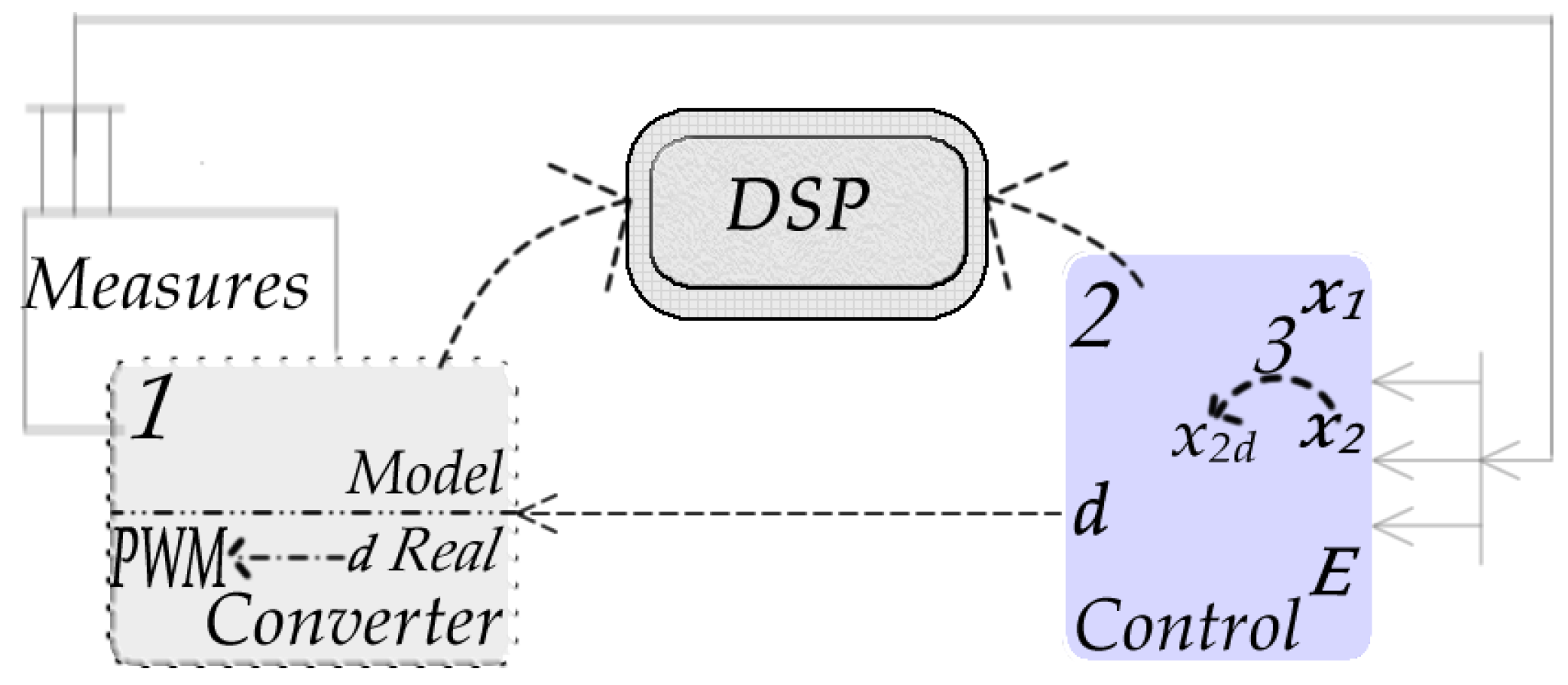
Figure 9 shows the general SHIL simulation scheme for any converter. The main control goal is to calculate the duty cycle
d(used in mathematical model), then the corresponding PWM signal is generated as an input control to command the switch of the physical converter. The state variables (inductor current
x and voltage capacitor
x) and input voltage E are the required measures. An integral action is added to better regulate the output voltage.
The second phase consists of simulating the implemented system. Aiming at minimizing the errors, it is advised to simulate the system in continuous time and afterly in discrete time. For the continuous system it is important to work with float data type, by programming the operations of multiplication, division and constant blocks to “single/double” types. Although the increasing in processing time, this data type conversion configures one less source of error in the continuous time simulation.
After that, it is necessary to discretize the system, by changing the controllers structure and continuous operators to the corresponding discrete blocks (defining a sample time in which the blocks will be sampled). In a way to approach the results of the first discretized system to the continuous simulation it is proposed the use of a high sample frequency (or a small sample time).
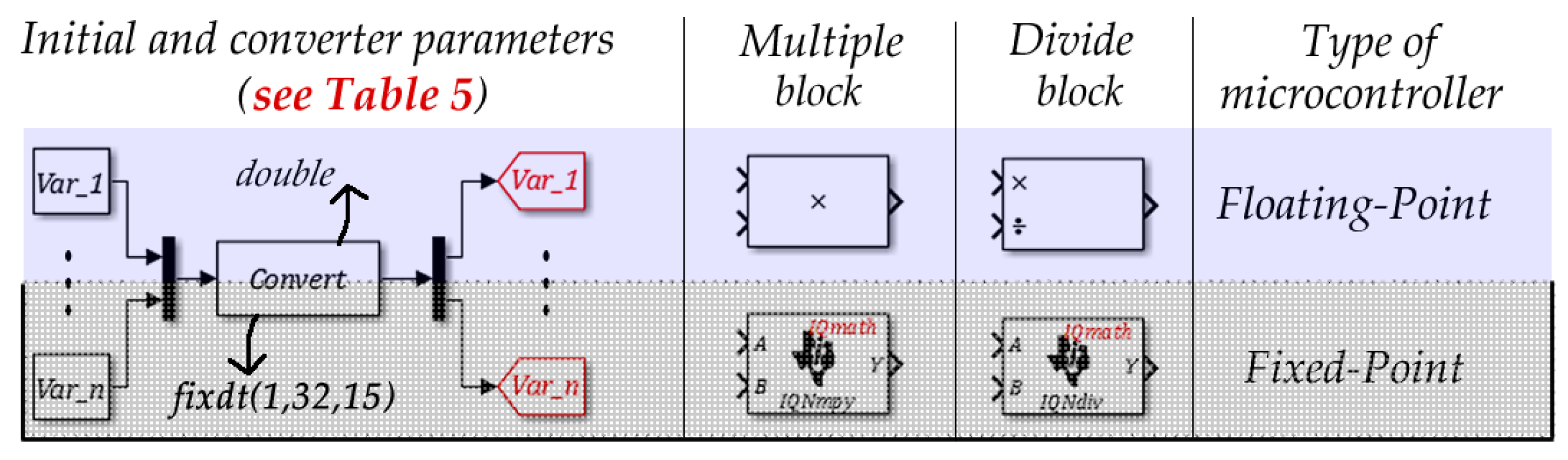
The next task is to simulate the system, considering a standard sample frequency (e.g., nominal 50 kHz), in such way to obtain a discrete model that is less approached by the continuous model. The selection of this frequency must be cautiously chosen, since the system can converge to instability. Another common problem associated to a bad choice of the sample frequency is the signal aliasing (Nyquist rule). The final objective of this stage consists in transforming the floating point data in fixed point data. This conversion can be done by programming the operations of multiplication, division and constant blocks to fixed-point type, or by using operational blocks offered in specific libraries for microcontrollers (libraries that are offered by Mathworks for users of C2000’s microcontrollers family, by Texas Instruments, for example), as shown in
Figure 10. Some recomendations: avoid operations with floating data and divisions that increase the processing time. Always when possible, use multiplication operations instead of division operations (ex: when the denominator is a constant). Declare the variables as fixed point, preventing calculus with float and optmizing the code’s execution. Discrete models can be embedded for HIL simulation, since the user compiler can convert the blocks in code. However, a discrete model that converges, when working with fixed point data, makes the compilation and the processing time of the microcontroller smaller (and also the memory used smaller). In this way, the last step brings a discrete model more appropriated for a HIL procedure.
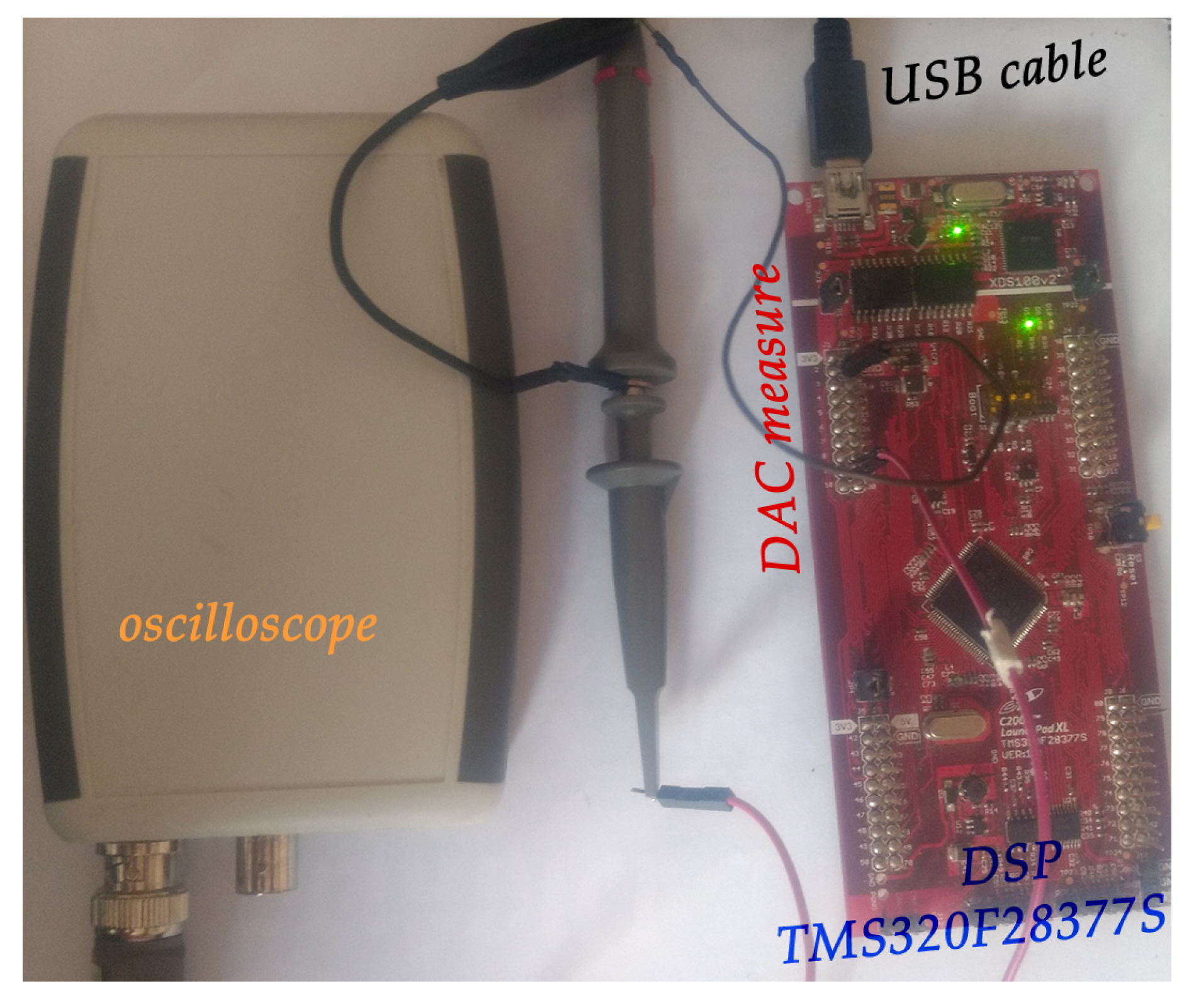
The final stage is the SHIL simulation itself. Once the compiler has generated the code and the system is embedded to the microcontroller (also called target) the communication between the target and the computer, in which Matlab/Simulink is running, begins. Usually microcontrollers of C2000 family communicates to the computer through USB or ethernet cable. In this application it is proposed the use of a USB cable. For running the system as a real-time simulation it is proposed to set the simulation as “external mode” simulation on Simulink. Also, it is necessary to set on the simulation configurations which target the connection must occur.
Since we are interested in plotting or viewing the gathered data, it is necessary to use specific blocks in the simulation for real-time plotting or setting DSP pins as analog outputs [
33]. By doing that the user can see the data generated in the target in a Simulink “scope” or in an oscilloscope (by analog output reading). Each case can be achieved by using the RTDX (real-time Data Exchanged) or the DAC blocks, as seen in
Figure 11. Since the R2016b version of Matlab there is a DAC block for DSP28377S of C2000 family (Texas Instruments). This block configures 3 digital inputs as 3 analog outputs (also called channels A, B and C). In this way it is possible to use 3 channels of an oscilloscope and view the curves in real-time.
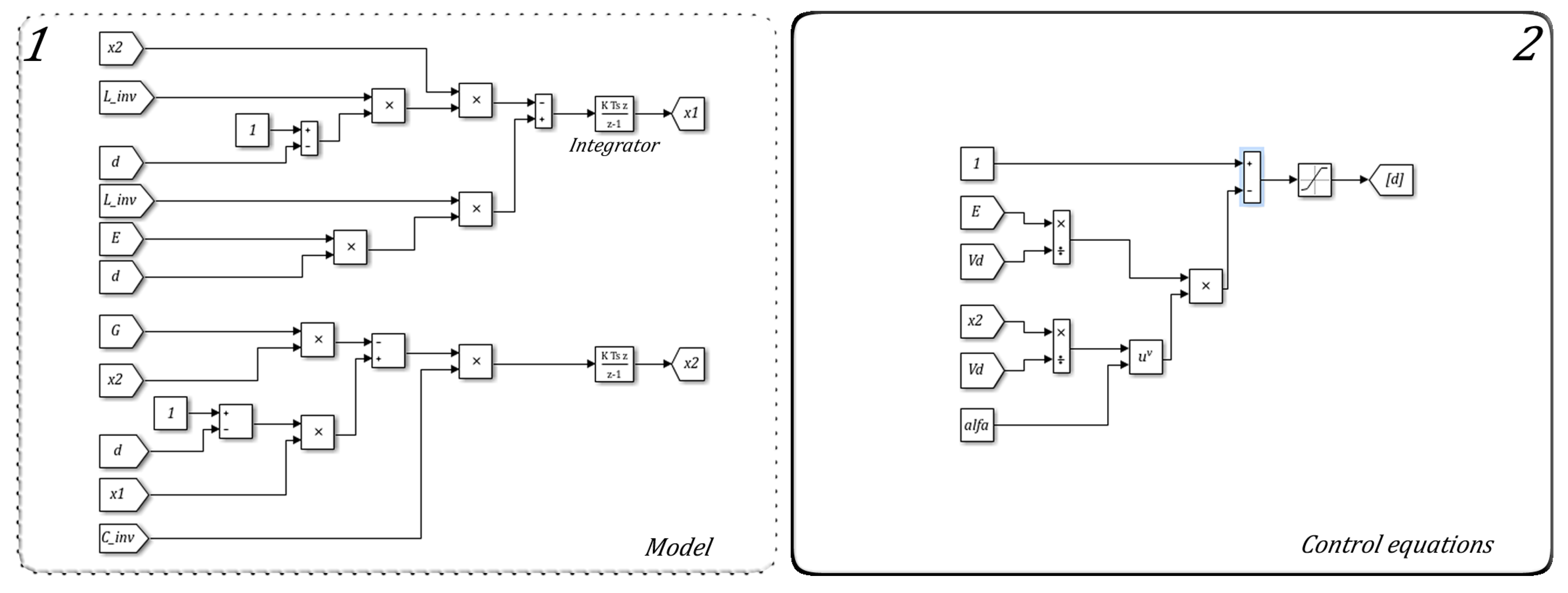
More details of the control algorithms implementation in block diagrams can be seen in the
Figure 12 and
Figure 13. Since the didactical background available in the literaute lacks of information, details of the functional blocks are shown, providing a development base for future works. Although the approach of this chapterdeals with a specific study of case, the available content makes it simple to adapt the program to other applications. General files, containing the control methods for Buck-Boost, Boost and Buck converters are shown in
Figure 8,
Figure 12 and
Figure 13, respectively.

 ,
, 


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}