Accurate Synchronization of Digital and Analog Chaotic Systems by Parameters Re-Identification



Abstract
:1. Introduction
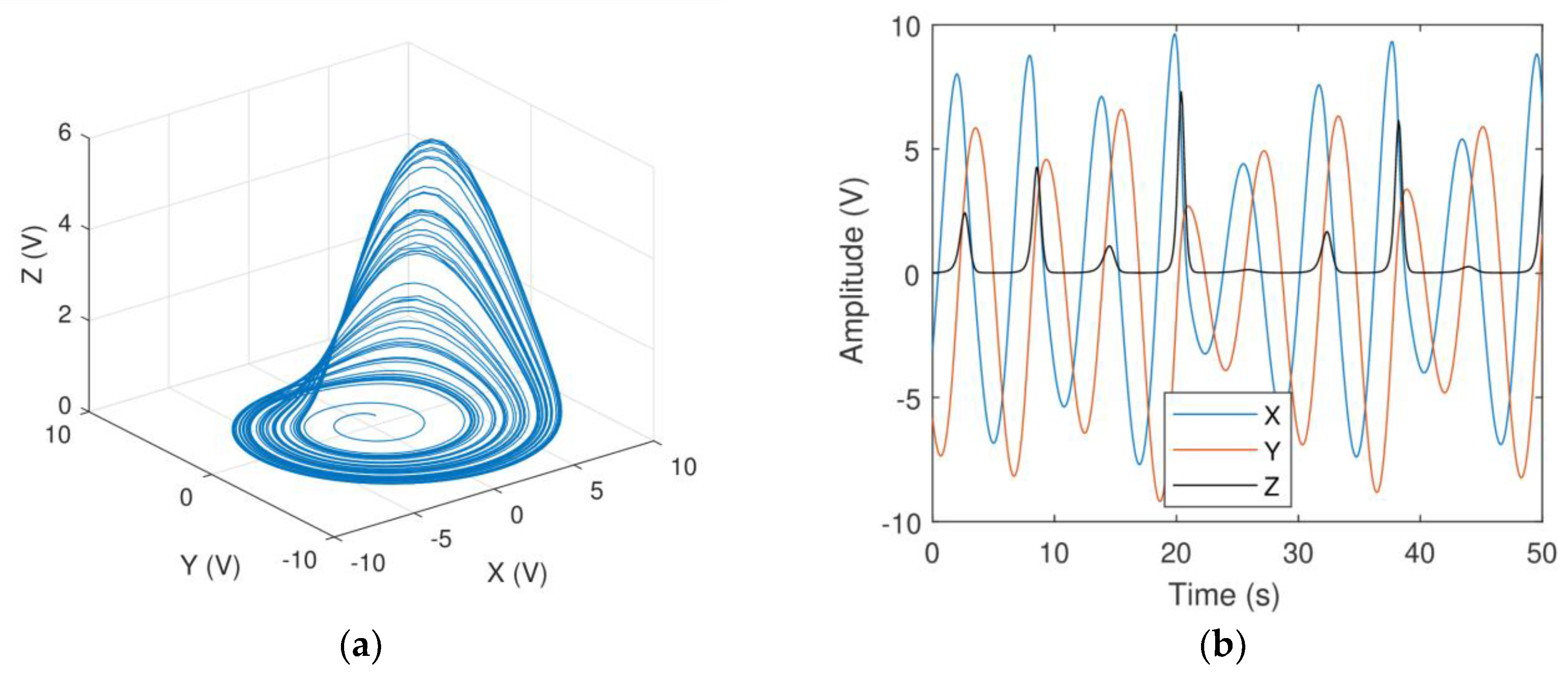
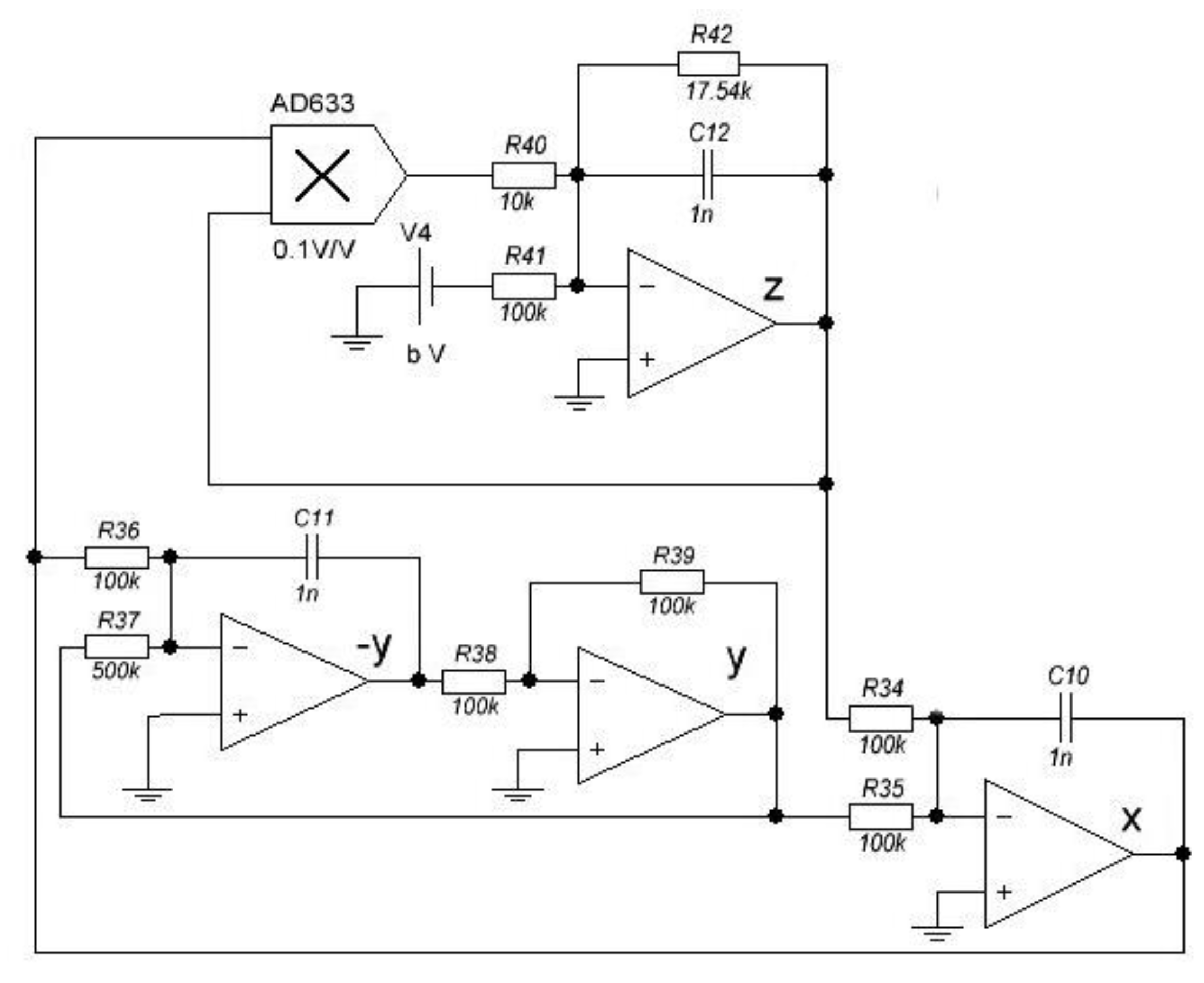
2. Materials and Methods: Identification of Rössler Oscillator Analog Model
- The record was divided into smaller pieces. Sequences of 400, 800, and 1200 points were used.
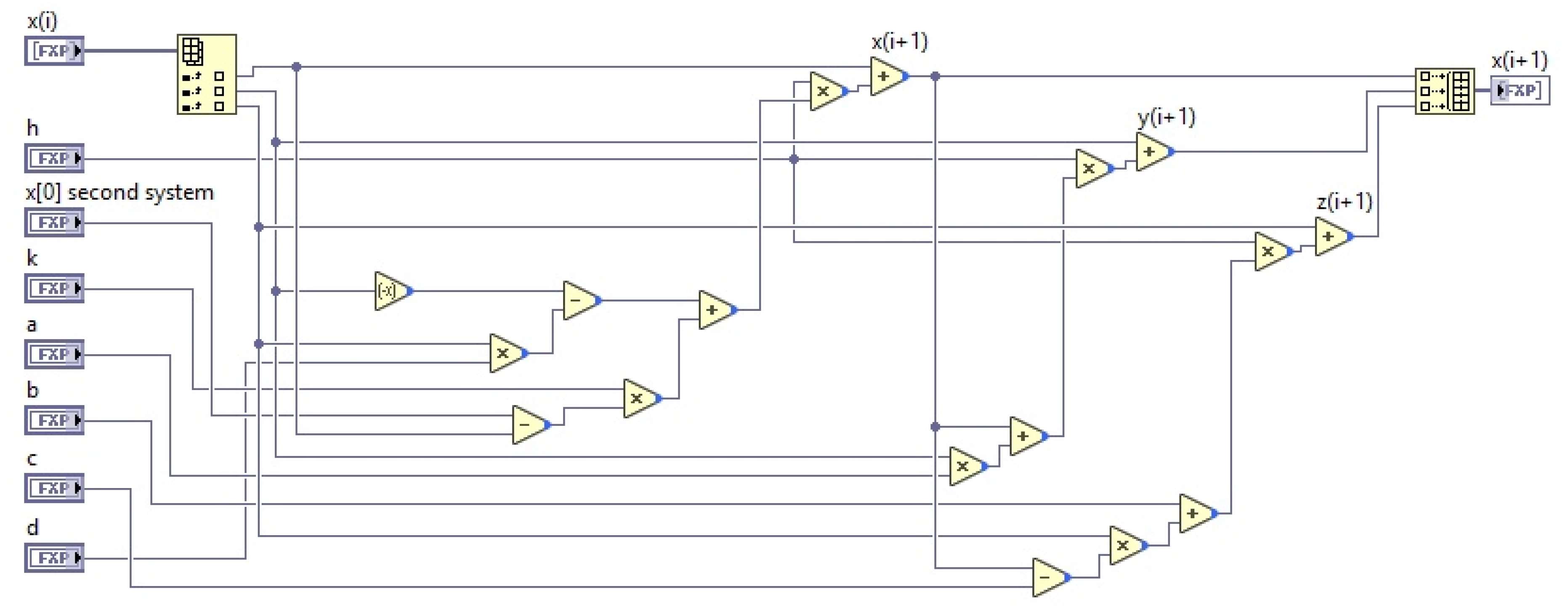
- A system with approximate parameters was simulated using the 8th order semi-implicit ECD method [18] to obtain the same number of points as the reference record had. Then a total root mean square error was calculated using the following weighted formula:
- The weight coefficients enhanced the convergence of the optimization algorithm.
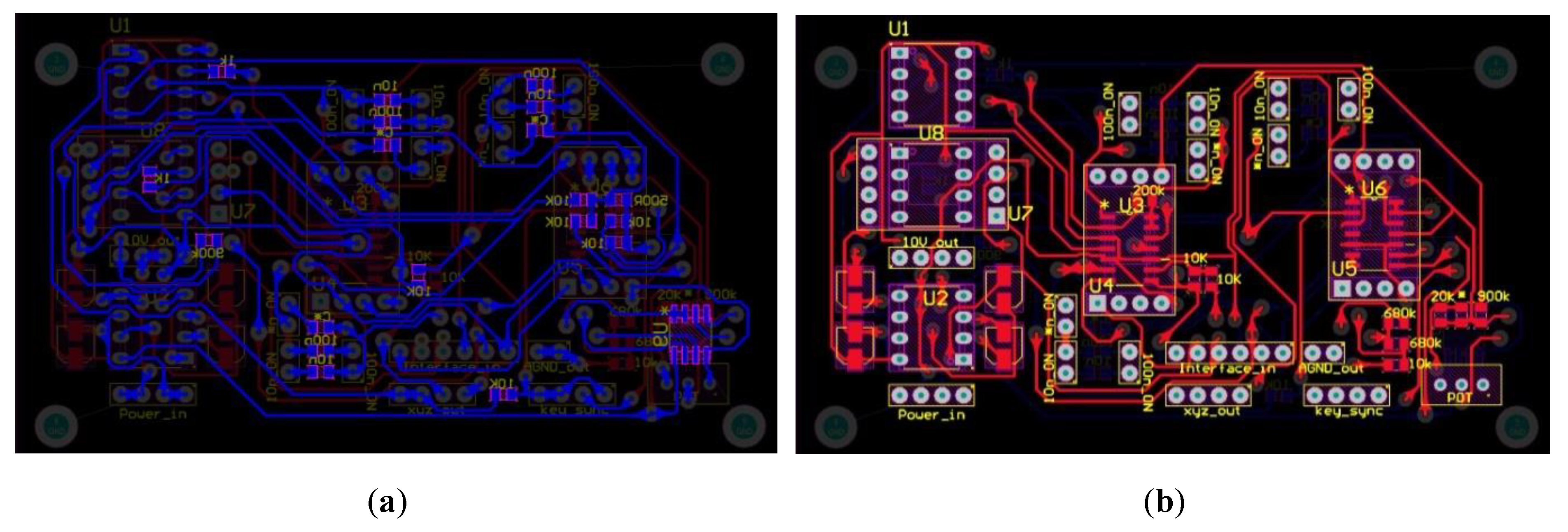
3. Digital–Analog Chaotic Oscillators Synchronization
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A



References
- Jovic, B. Application of Chaotic Synchronization to Secure Communications. Synchronization Techniques for Chaotic Communication Systems. Signals and Communication Technology; Springer International Publishing: Berlin/Heidelberg, Germany, 2011; pp. 135–169. [Google Scholar]
- Murillo-Escobar, M.A.; Cruz-Hernández, C.; Abundiz-Pérez, F.; López-Gutiérrez, R.M. Implementation of an improved chaotic encryption algorithm for real-time embedded systems by using a 32-bit microcontroller. Microprocess. Microsyst. 2016, 45, 297–309. [Google Scholar] [CrossRef]
- Teodorescu, H.N.; Cojocaru, V. Biomimetic chaotic sensors for water salinity measurements and conductive titrimetry emerging security technologies. In Proceedings of the 2012 Third International Conference on Emerging Security Technologies (EST), Lisbon, Portugal, 5–7 September 2012; pp. 182–185. [Google Scholar]
- Silva, M.; Nepomuceno, E.; Amaral, G.; Martins, S.; Nardo, G. Exploiting the rounding mode of floating-point in the simulation of Chua’s circuit. Electr. Eng. Syst. Sci. 2018, 7, 185–193. [Google Scholar] [CrossRef]
- Nepomuceno, E.G.; Martins, S.A.; Silva, B.C.; Amaral, G.F.; Perc, M. Detecting unreliable computer simulations of recursive functions with interval extensions. Appl. Math. Comput. 2018, 329, 408–419. [Google Scholar] [CrossRef]
- Karimov, T.I.; Butusov, D.N.; Pesterev, D.O.; Predtechenskii, D.V.; Tedoradze, R.S. Quasi-chaotic mode detection and prevention in digital chaos generators. In Proceedings of the 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), Moscow, Russia, 29 January–1 February 2018; pp. 303–307. [Google Scholar]
- Mendes, E.M.; Nepomuceno, E.G. A very simple method to calculate the (positive) largest Lyapunov exponent using interval extensions. Int. J. Bifurcation. Chaos 2016, 26, 1650226. [Google Scholar] [CrossRef]
- Mladenov, V.; Kirilov, S.A. Memristor Model with a Modified Window Function and Activation Thresholds. In Proceedings of the 2018 IEEE International Symposium on Circuits and Systems (ISCAS), Florence, Italy, 27–30 May 2018; pp. 1–5. [Google Scholar]
- Butusov, D.N.; Ostrovskii, V.Y.; Karimov, A.I.; Belkin, D.A. Study of two-memcapacitor circuit model with semi-explicit ODE solver. In Proceedings of the 2017 21st Conference of Open Innovations Association (FRUCT), Helsinki, Finland, 6–10 November 2017; pp. 64–70. [Google Scholar]
- Saito, T.; Nakagawa, S. Chaos from a hysteresis and switched circuit. Philos. Trans. R. Soc. A 1995, 353, 47–57. [Google Scholar] [CrossRef]
- Zeraoulia, E.; Sprott, D.C. Robust Chaos and Its Applications; World Scientific: Singapore, 2012; Volume 79. [Google Scholar]
- Pham, V.T.; Volos, C.; Jafari, S.; Wang, X.; Kapitaniak, T. A simple chaotic circuit with a light-emitting diode. Optoelectron. Adv. Mater. Rapid Commun. 2016, 10, 640–646. [Google Scholar]
- Miller, D.A.; Dozeman, M.; Westphal, G.; Abdel-Qader, K. A hybrid analog/digital circuit for experiments in controlling chaos. In Proceedings of the 2002 45th Midwest Symposium on Circuits and Systems (MWSCAS), Tulsa, OK, USA, 4–7 August 2002; pp. 1–188. [Google Scholar]
- Butusov, D.N.; Karimov, T.I.; Lizunova, I.A.; Soldatkina, A.A.; Popova, E.N. Synchronization of Analog and Discrete Rössler Chaotic Systems. In Proceedings of the 2017 IEEE Russia Section Young Researchers in Electrical and Electronic Engineering Conference (ElConRus), Saint-Petersburg, Russia, 1–3 February 2017; pp. 265–270. [Google Scholar]
- Chang, W.D. Parameter identification of Rossler’s chaotic system by an evolutionary algorithm. Chaos Solitons Fractals 2006, 29, 1047–1053. [Google Scholar] [CrossRef]
- Lacerda, M.J.; Martins, S.A.M.; Nepomuceno, E.G. Structure Selection Based on Interval Predictor Model for Recovering Static non-linearities from Chaotic Data. IET Control Theory Applications. 16 April 2018. Available online: http://digital-library.theiet.org/content/journals/10.1049/iet-cta.2017.1033 (accessed on 17 April 2018).
- Rössler, O.E. An equation for continuous chaos. Phys. Lett. A 1976, 57, 397–398. [Google Scholar] [CrossRef]
- Butusov, D.N.; Karimov, A.I.; Tutueva, A.V. Hardware-targeted semi-implicit extrapolation ODE solvers. In Proceedings of the 2016 International Siberian Conference on Control and Communications (SIBCON), Moscow, Russia, 12–14 May 2016; pp. 1–6. [Google Scholar]
- Hooke, R.; Jeeves, T.A. Direct search solution of numerical and statistical problems. J. Assoc. Comput. Mach. 1961, 8, 212–229. [Google Scholar] [CrossRef]
- Buscarino, A.; Frasca, M.; Branciforte, M.; Fortuna, L. Synchronization of two Rossler systems with switching coupling. Nonlinear Dyn. 2017, 88, 673–683. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Synchronized Couple | RMS Error, % |
|---|---|
| Analog–analog | 1.4 |
| Analog–digital with manual tuning | 0.6 |
| Analog–digital with identification | 0.36 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karimov, T.; Butusov, D.; Andreev, V.; Karimov, A.; Tutueva, A. Accurate Synchronization of Digital and Analog Chaotic Systems by Parameters Re-Identification. Electronics 2018, 7, 123. https://doi.org/10.3390/electronics7070123
Karimov T, Butusov D, Andreev V, Karimov A, Tutueva A. Accurate Synchronization of Digital and Analog Chaotic Systems by Parameters Re-Identification. Electronics. 2018; 7(7):123. https://doi.org/10.3390/electronics7070123
Chicago/Turabian StyleKarimov, Timur, Denis Butusov, Valery Andreev, Artur Karimov, and Aleksandra Tutueva. 2018. "Accurate Synchronization of Digital and Analog Chaotic Systems by Parameters Re-Identification" Electronics 7, no. 7: 123. https://doi.org/10.3390/electronics7070123
APA StyleKarimov, T., Butusov, D., Andreev, V., Karimov, A., & Tutueva, A. (2018). Accurate Synchronization of Digital and Analog Chaotic Systems by Parameters Re-Identification. Electronics, 7(7), 123. https://doi.org/10.3390/electronics7070123