A Tilt Sensor Node Embedding a Data-Fusion Algorithm for Vibration-Based SHM

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
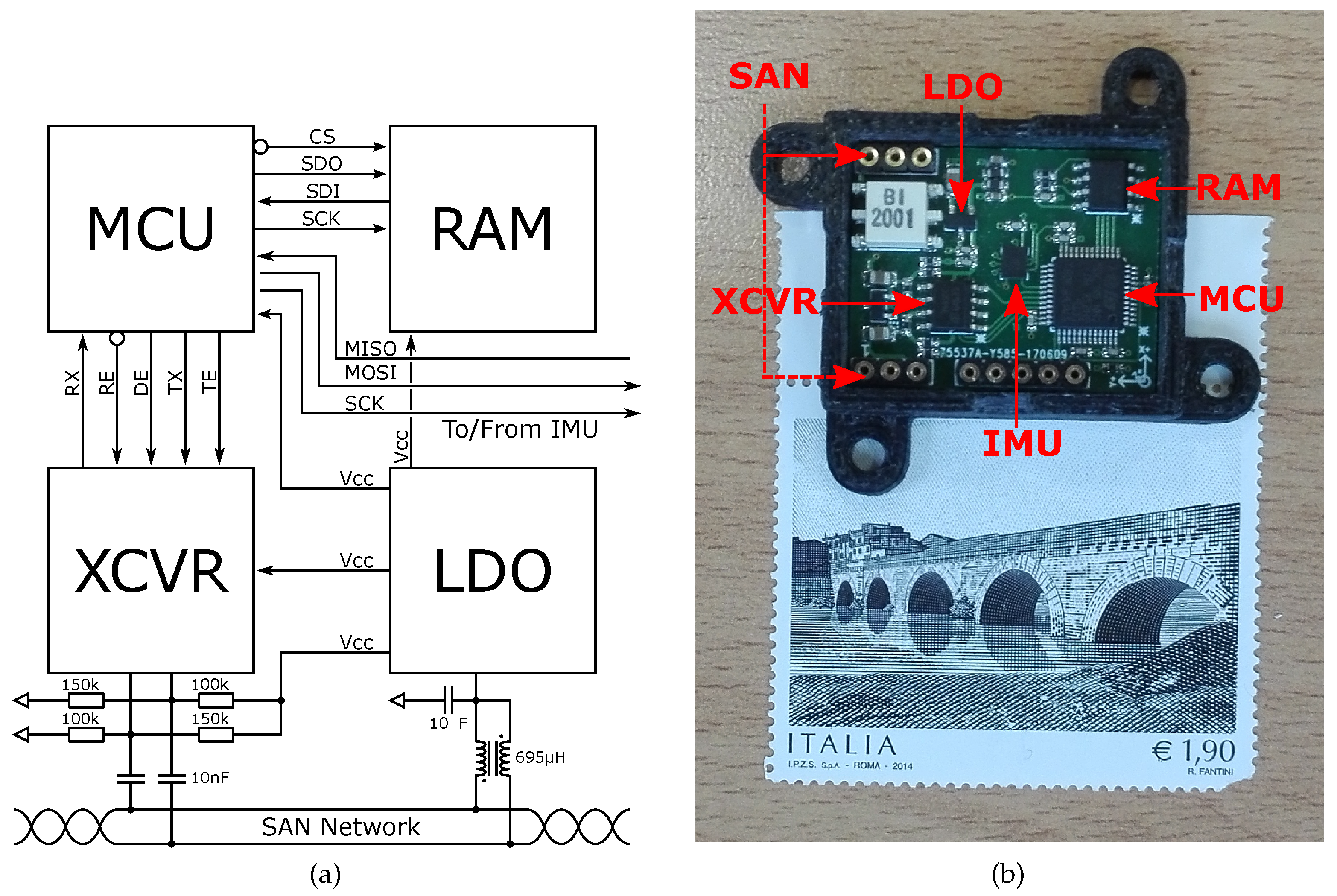
2.1. Sensor Node
2.2. Sensor Data Fusion
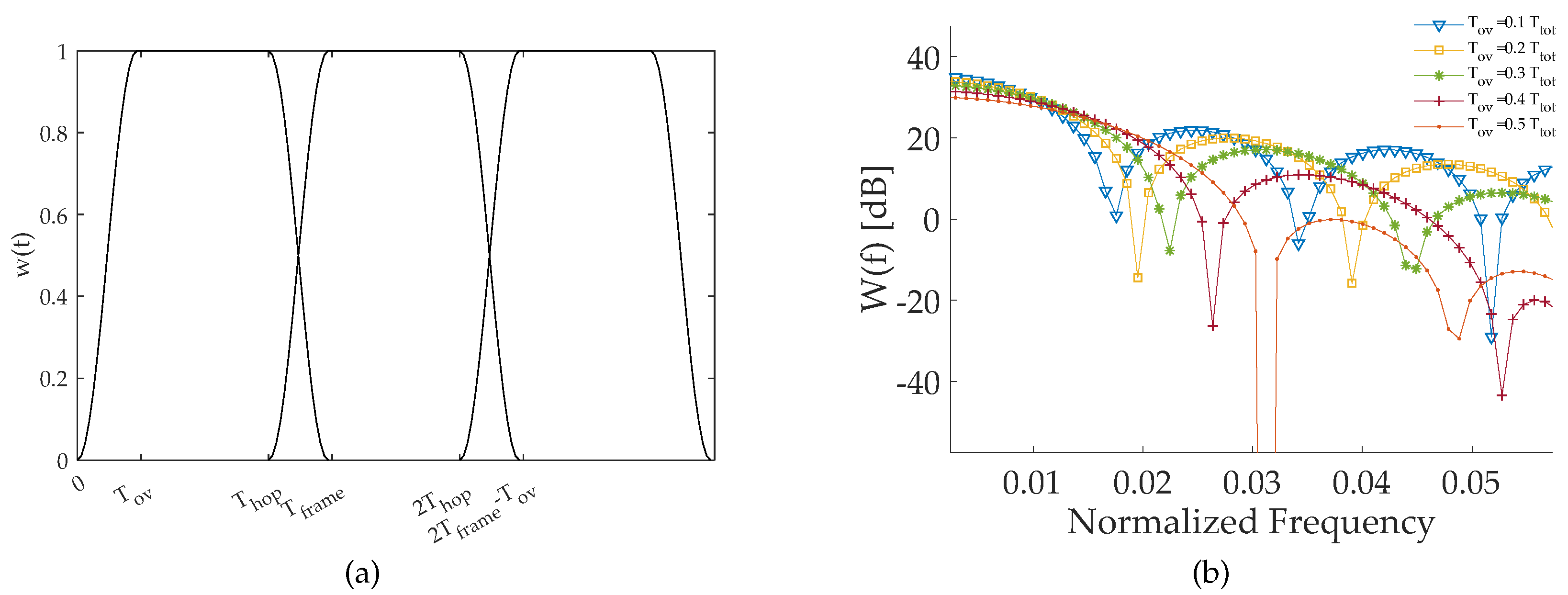
2.3. Algorithm Definition
2.4. Embedded Processing
3. System test and Discussion
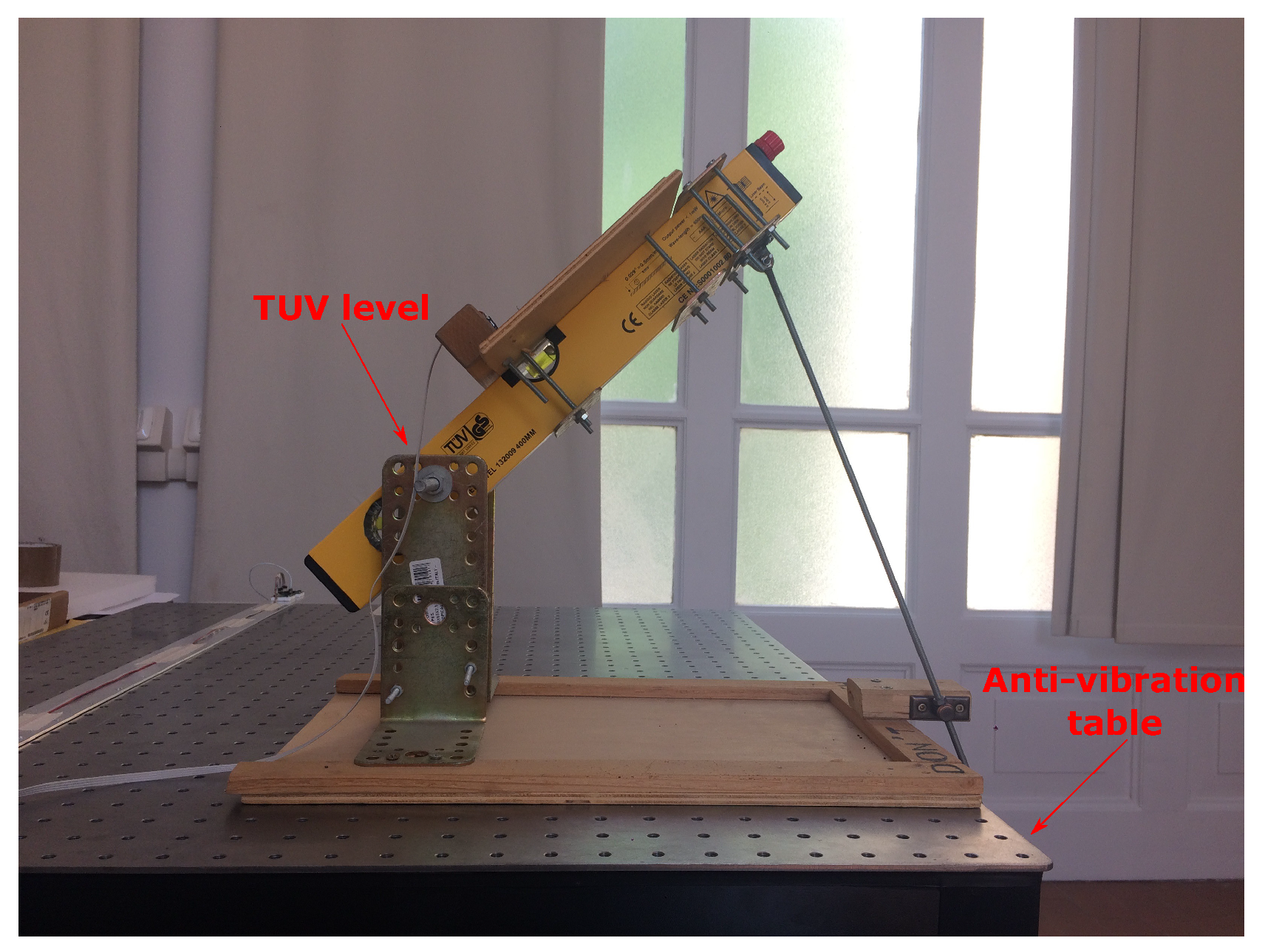
3.1. System Validation in Static Condition
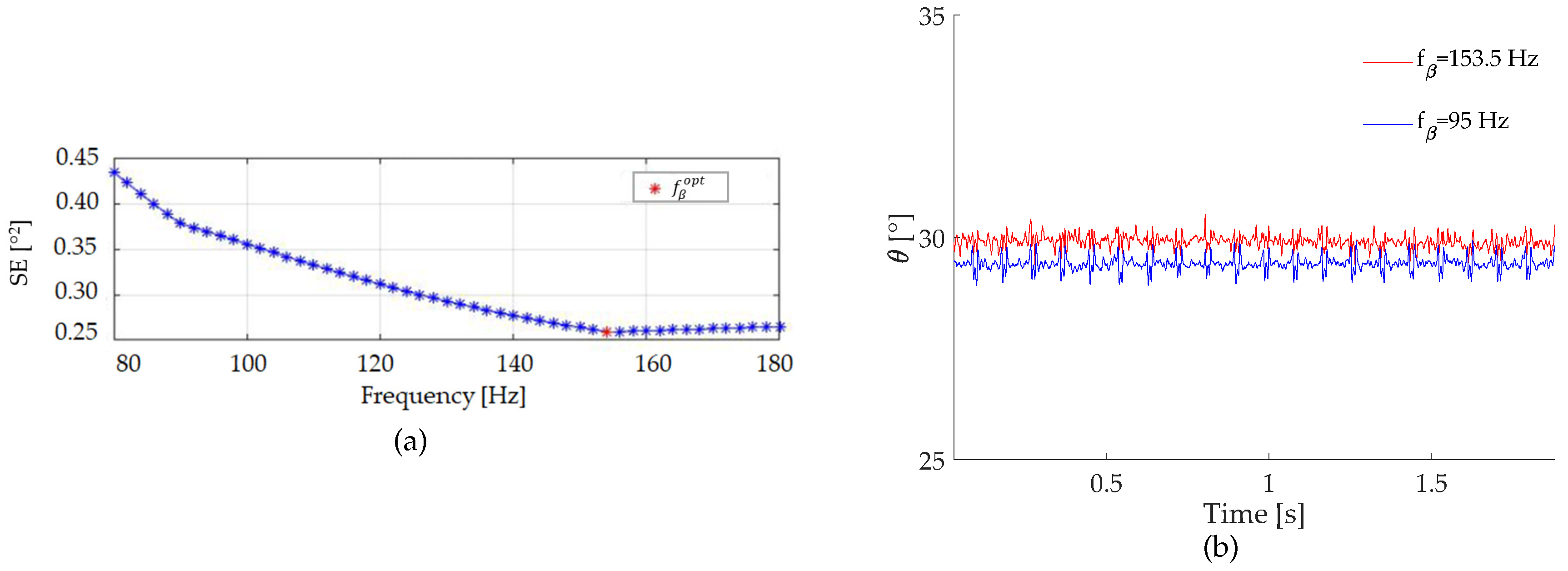
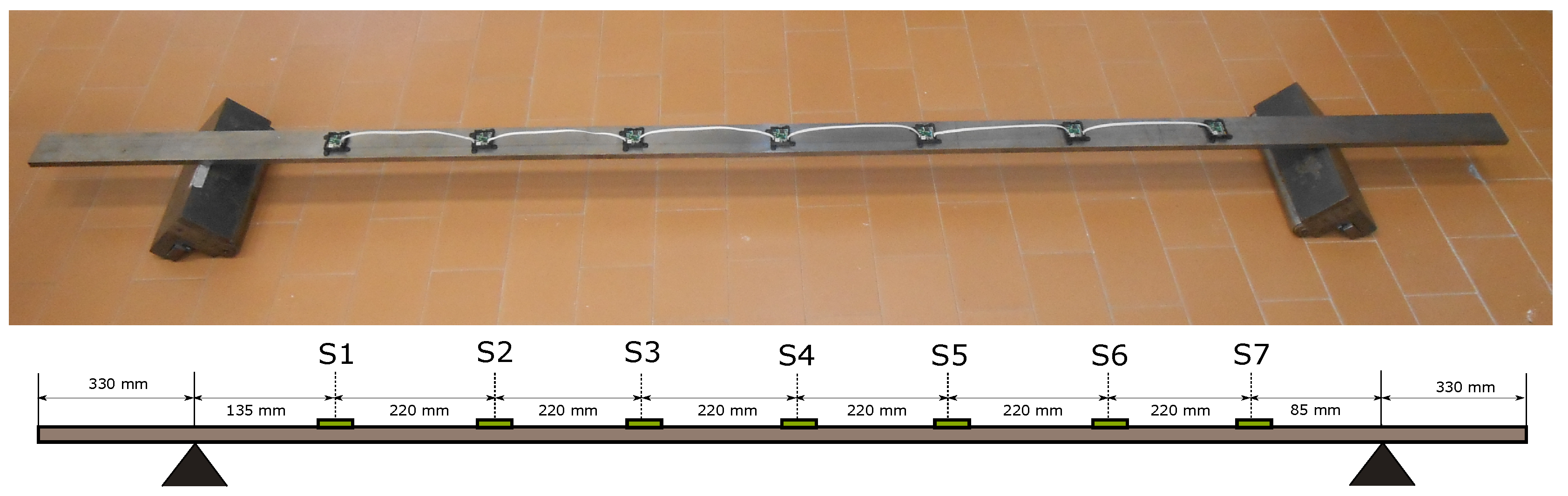
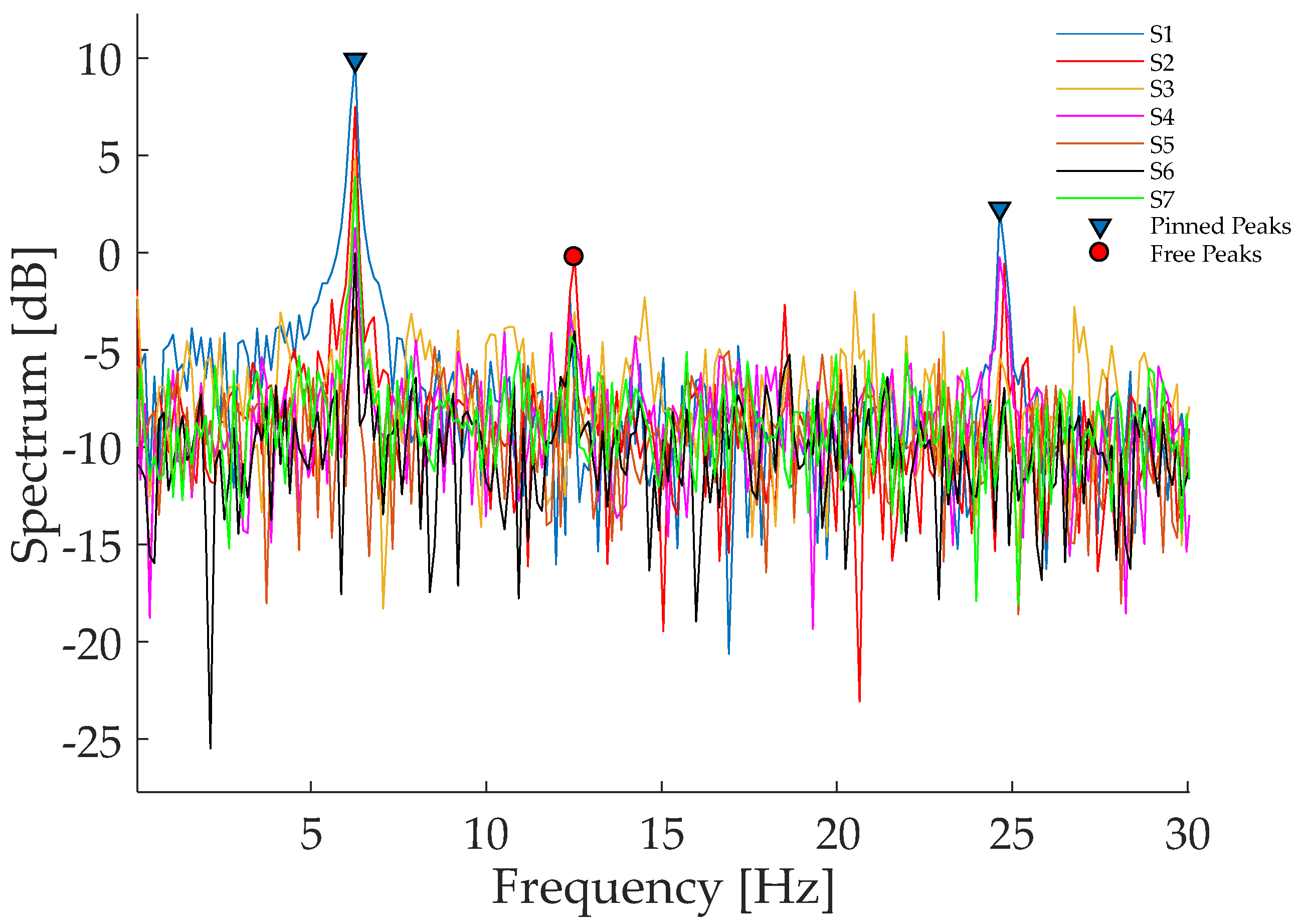
3.2. Vibration Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Lynch, J.P.; Loh, K.J. A summary review of wireless sensors and sensor networks for structural health monitoring. Shock Vib. Dig. 2006, 38, 91–130. [Google Scholar] [CrossRef]
- Poncelet, F.; Kerschen, G.; Golinval, J.C.; Verhelst, D. Output-only modal analysis using blind source separation techniques. Mech. Syst. Signal Process. 2007, 21, 2335–2358. [Google Scholar] [CrossRef]
- Esfandabadi, Y.K.; De Marchi, L.; Testoni, N.; Marzani, A.; Masetti, G. Full wavefield analysis and Damage imaging through compressive sensing in Lamb wave inspections. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 269–280. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Wang, B.; Ji, H. A wireless sensor network-based structural health monitoring system for highway bridges. Comput.-Aid. Civ. Infrastruct. Eng. 2013, 28, 193–209. [Google Scholar] [CrossRef]
- Manthei, G.; Plenkers, K. Review on In Situ Acoustic Emission Monitoring in the Context of Structural Health Monitoring in Mines. Appl. Sci. 2018, 8, 1595. [Google Scholar] [CrossRef]
- Ngabo, C.I.; El Beqqali, O. 3D tilt sensing by using accelerometer-based wireless sensor networks: Real case study: Application in the smart cities. In Proceedings of the 2018 International Conference on Intelligent Systems and Computer Vision (ISCV), Fez, Morocco, 2–4 April 2018; pp. 1–8. [Google Scholar]
- Giri, P.; Ng, K.; Phillips, W. Laboratory simulation to understand translational soil slides and establish movement criteria using wireless IMU sensors. Landslides 2018, 15, 2437–2447. [Google Scholar] [CrossRef]
- Sung, S.H.; Park, J.W.; Nagayama, T.; Jung, H.J. A multi-scale sensing and diagnosis system combining accelerometers and gyroscopes for bridge health monitoring. Smart Mater. Struct. 2013, 23, 015005. [Google Scholar] [CrossRef]
- Hu, R.; Xu, Y.; Lu, X.; Zhang, C.; Zhang, Q.; Ding, J. Integrated multi-type sensor placement and response reconstruction method for high-rise buildings under unknown seismic loading. Struct. Des. Tall Spec. Build. 2018, 27, e1453. [Google Scholar] [CrossRef]
- Li, X.; Rizos, C.; Tamura, Y.; Ge, L.; Yoshida, A.; Cranenbroeck, J. Fundamental bending mode and vibration monitoring with inclinometer and accelerometer on high-rise buildings subject to wind loads. In Proceedings of the 5th World Conference Structural Control and Monitoring, Tokyo, Japan, 12–14 July 2010; pp. 1–15. [Google Scholar]
- Yigit, C.O.; Li, X.; Inal, C.; Ge, L.; Yetkin, M. Preliminary evaluation of precise inclination sensor and GPS for monitoring full-scale dynamic response of a tall reinforced concrete building. J. Appl. Geod. 2010, 4, 103–113. [Google Scholar] [CrossRef]
- Su, J.Z.; Xia, Y.; Chen, L.; Zhao, X.; Zhang, Q.L.; Xu, Y.L.; Ding, J.M.; Xiong, H.B.; Ma, R.J.; Lv, X.L.; et al. Long-term structural performance monitoring system for the Shanghai Tower. J. Civ. Struct. Health Monit. 2013, 3, 49–61. [Google Scholar] [CrossRef]
- Dong, L.; Wang, H.; Wang, G.; Qiu, W. A wireless multifunctional monitoring system of tower body running state based on MEMS acceleration sensor. In Proceedings of the 2018 19th International Symposium on Quality Electronic Design (ISQED), Santa Clara, CA, USA, 13–14 March 2018; pp. 357–363. [Google Scholar]
- König, S.; Leinfelder, P. First results with MEMS tilt sensors on bridges. In Proceedings of the Intertial Sensors and Systems (ISS), Karlsruhe, Germany, 20–21 Septenber 2016; pp. 1–15. [Google Scholar]
- Leavitt, J.; Sideris, A.; Bobrow, J.E. High bandwidth tilt measurement using low-cost sensors. IEEE/ASME Trans. Mech. 2006, 11, 320–327. [Google Scholar] [CrossRef]
- Liu, Y.; Noguchi, N.; Ishii, K. Development of a low-cost IMU by using sensor fusion for attitude angle estimation. IFAC Proc. Vol. 2014, 47, 4435–4440. [Google Scholar] [CrossRef]
- Li, C.; Azzam, R.; Fernández-Steeger, T.M. Kalman Filters in Geotechnical Monitoring of Ground Subsidence Using Data from MEMS Sensors. Sensors 2016, 16, 1109. [Google Scholar] [CrossRef] [PubMed]
- Yean, S.; Lee, B.S.; Yeo, C.K.; Vun, C.H. Algorithm for 3D orientation estimation based on Kalman filter and gradient descent. In Proceedings of the 2016 IEEE 7th Annual Information Technology, Electronics and Mobile Communication Conference, Vancouver, BC, Canada, 13–15 October 2016; pp. 1–6. [Google Scholar]
- Ren, Y.; Ke, X. Particle filter data fusion enhancements for MEMS-IMU/GPS. Intell. Inf. Manag. 2010, 2, 417. [Google Scholar] [CrossRef]
- Lim, J.; Hong, D. Cost reference particle filtering approach to high-bandwidth tilt estimation. IEEE Trans. Ind. Electron. 2010, 57, 3830–3839. [Google Scholar] [CrossRef]
- Lee, H.S.; Hong, Y.H.; Park, H.W. Design of an FIR filter for the displacement reconstruction using measured acceleration in low-frequency dominant structures. Int. J. Numer. Methods Eng. 2010, 82, 403–434. [Google Scholar] [CrossRef]
- Park, J.W.; Sim, S.H.; Jung, H.J. Displacement estimation using multimetric data fusion. IEEE/ASME Trans. Mech. 2013, 18, 1675–1682. [Google Scholar] [CrossRef]
- Liu, C.; Park, J.W.; Spencer, B., Jr.; Moon, D.S.; Fan, J. Sensor fusion for structural tilt estimation using an acceleration-based tilt sensor and a gyroscope. Smart Mater. Struct. 2017, 26, 105005. [Google Scholar] [CrossRef]
- Shi, L.; He, Y.; Luo, Q.; He, W.; Li, B. Tilt Angle On-Line Prognosis by Using Improved Sparse LSSVR and Dynamic Sliding Window. IEEE Trans. Instrum. Meas. IM 2018, 67, 296–306. [Google Scholar] [CrossRef]
- Testoni, N.; Aguzzi, C.; Arditi, V.; Zonzini, F.; De Marchi, L.; Marzani, A.; Cinotti, T.S. A Sensor Network with Embedded Data Processing and Data-to-Cloud Capabilities for Vibration-Based Real-Time SHM. J. Sens. 2018, 2018, 2107679. [Google Scholar] [CrossRef]
- STMicroelectronics. iNEMO Inertial Module: Always-On 3D Accelerometer and 3D Gyroscope; Technical Report; STMicroelectronics: Geneva, Switzerland, 2017. [Google Scholar]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Lahat, D.; Adali, T.; Jutten, C. Multimodal data fusion: an overview of methods, challenges, and prospects. Proc. IEEE 2015, 103, 1449–1477. [Google Scholar] [CrossRef]
- Kok, M.; Hol, J.D.; Schön, T.B. Using inertial sensors for position and orientation estimation. arXiv, 2017; arXiv:1704.06053. [Google Scholar]
- Smith, J.O. Spectral Audio Signal Processing; W3K Publishing: Palo Alto, CA, USA, 2011. [Google Scholar]
- Graff, K.F. Wave Motion in Elastic Solids; Courier Corporation: Chelmsford, MA, USA, 2012. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Tilt | Measured Tilt | ||
|---|---|---|---|
| [°] | [°] | [%] | [°] |
| 30 | 30.1832 | 0.611 | 0.1399 |
| 45 | 45.0024 | 0.005 | 0.1523 |
| 60 | 60.3116 | 0.519 | 0.1985 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Testoni, N.; Zonzini, F.; Marzani, A.; Scarponi, V.; De Marchi, L. A Tilt Sensor Node Embedding a Data-Fusion Algorithm for Vibration-Based SHM. Electronics 2019, 8, 45. https://doi.org/10.3390/electronics8010045
Testoni N, Zonzini F, Marzani A, Scarponi V, De Marchi L. A Tilt Sensor Node Embedding a Data-Fusion Algorithm for Vibration-Based SHM. Electronics. 2019; 8(1):45. https://doi.org/10.3390/electronics8010045
Chicago/Turabian StyleTestoni, Nicola, Federica Zonzini, Alessandro Marzani, Valentina Scarponi, and Luca De Marchi. 2019. "A Tilt Sensor Node Embedding a Data-Fusion Algorithm for Vibration-Based SHM" Electronics 8, no. 1: 45. https://doi.org/10.3390/electronics8010045
APA StyleTestoni, N., Zonzini, F., Marzani, A., Scarponi, V., & De Marchi, L. (2019). A Tilt Sensor Node Embedding a Data-Fusion Algorithm for Vibration-Based SHM. Electronics, 8(1), 45. https://doi.org/10.3390/electronics8010045