Novel Dead-Time Compensation Strategy for Wide Current Range in a Three-Phase Inverter


Abstract
1. Introduction
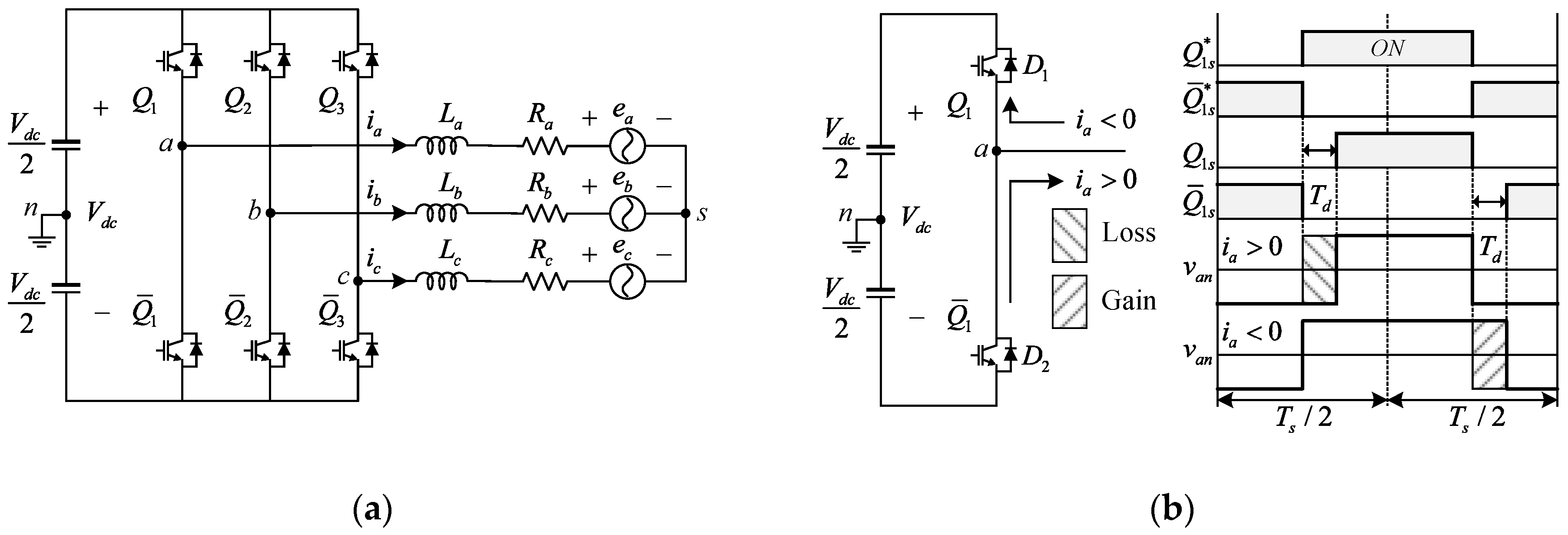
2. Analysis of the Dead-Time Effects
2.1. The Three-Phase VSI Output Voltage Errors by the Dead-Time
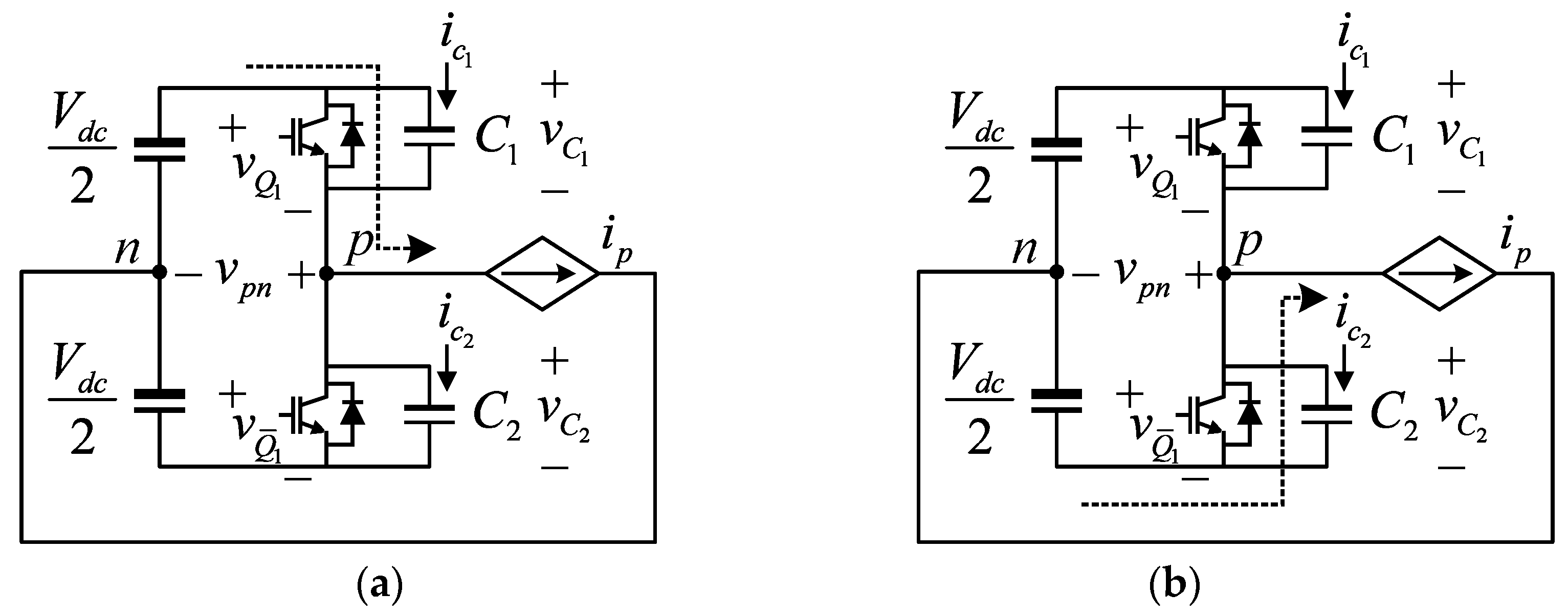
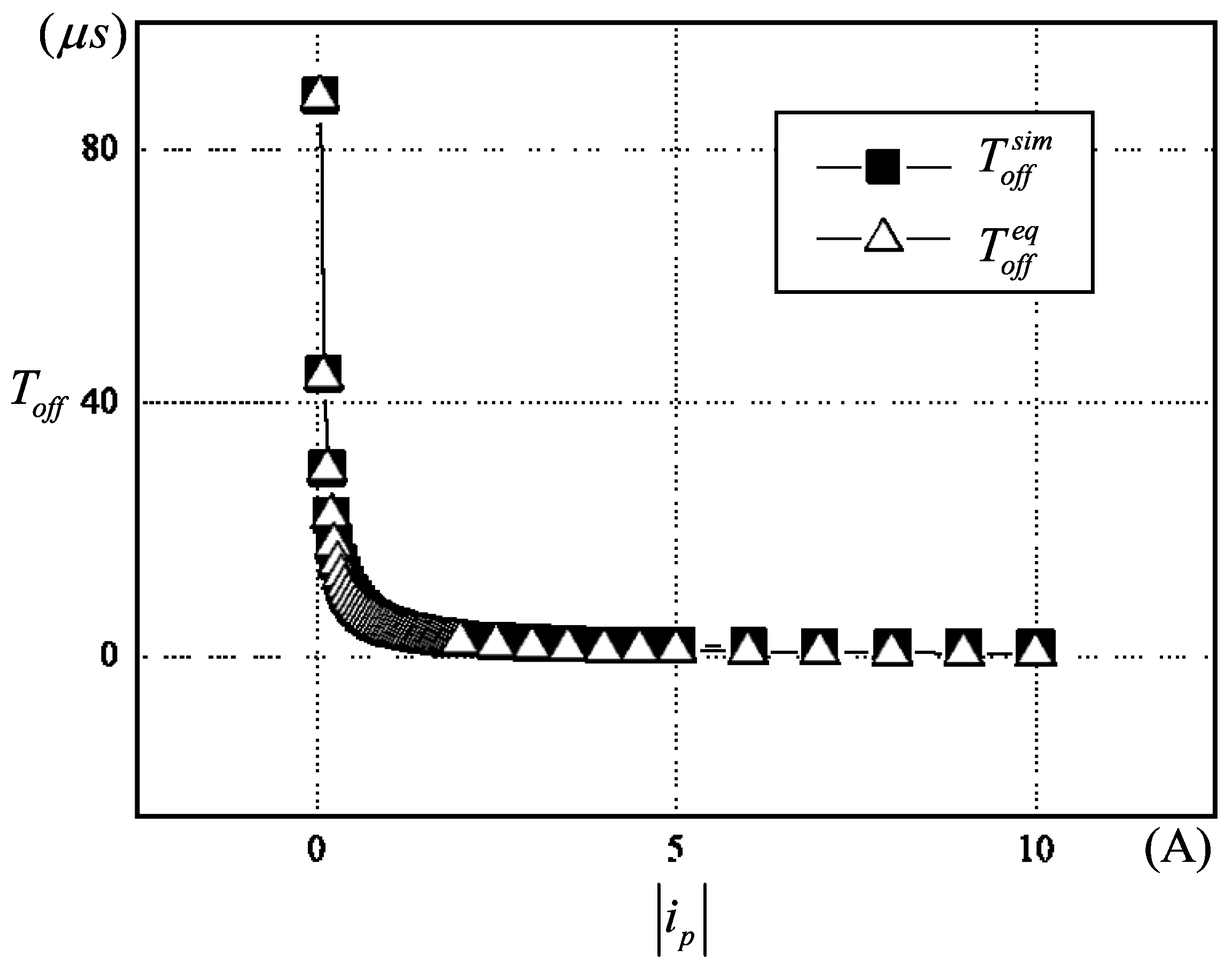
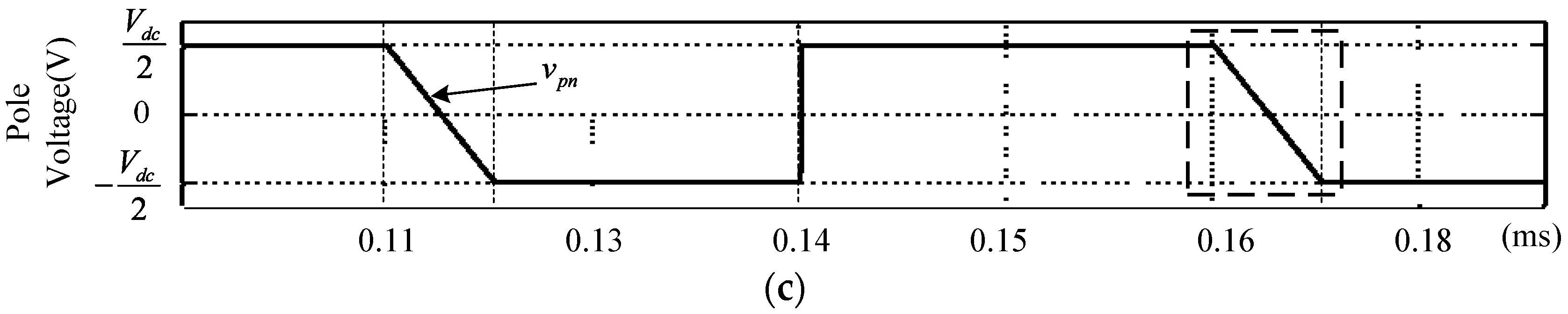
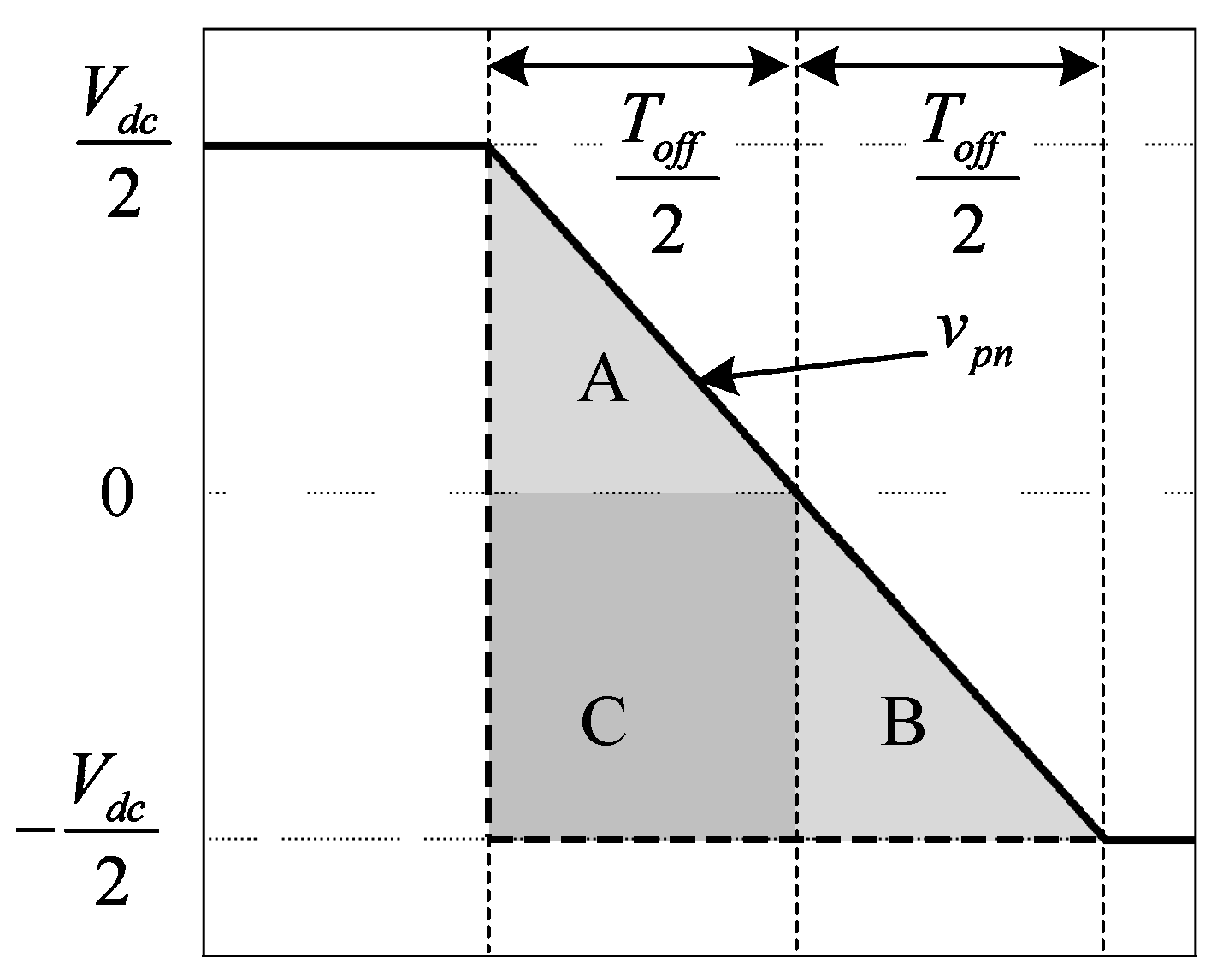
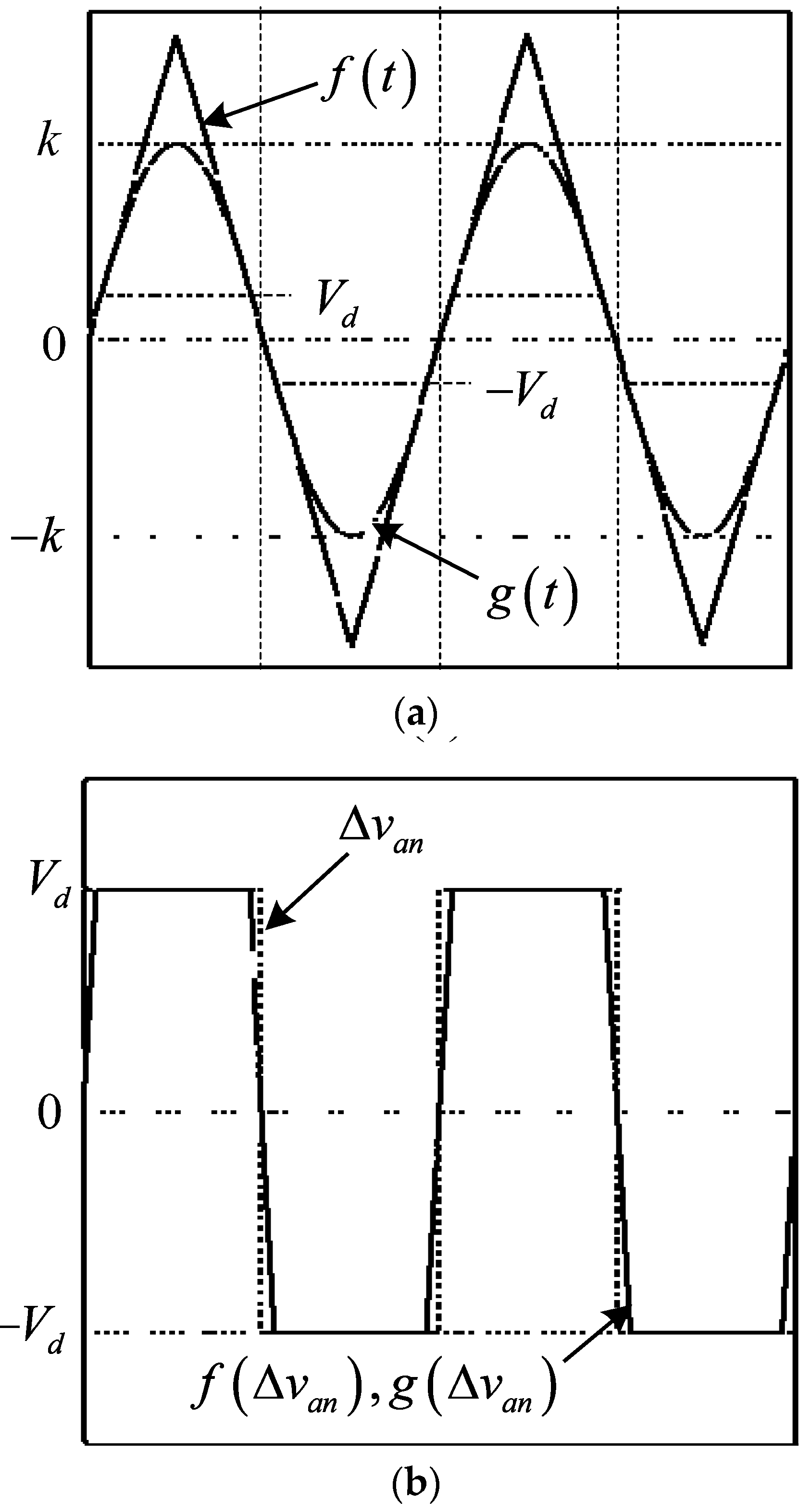
2.2. The Effects of Switch Parasitic Components
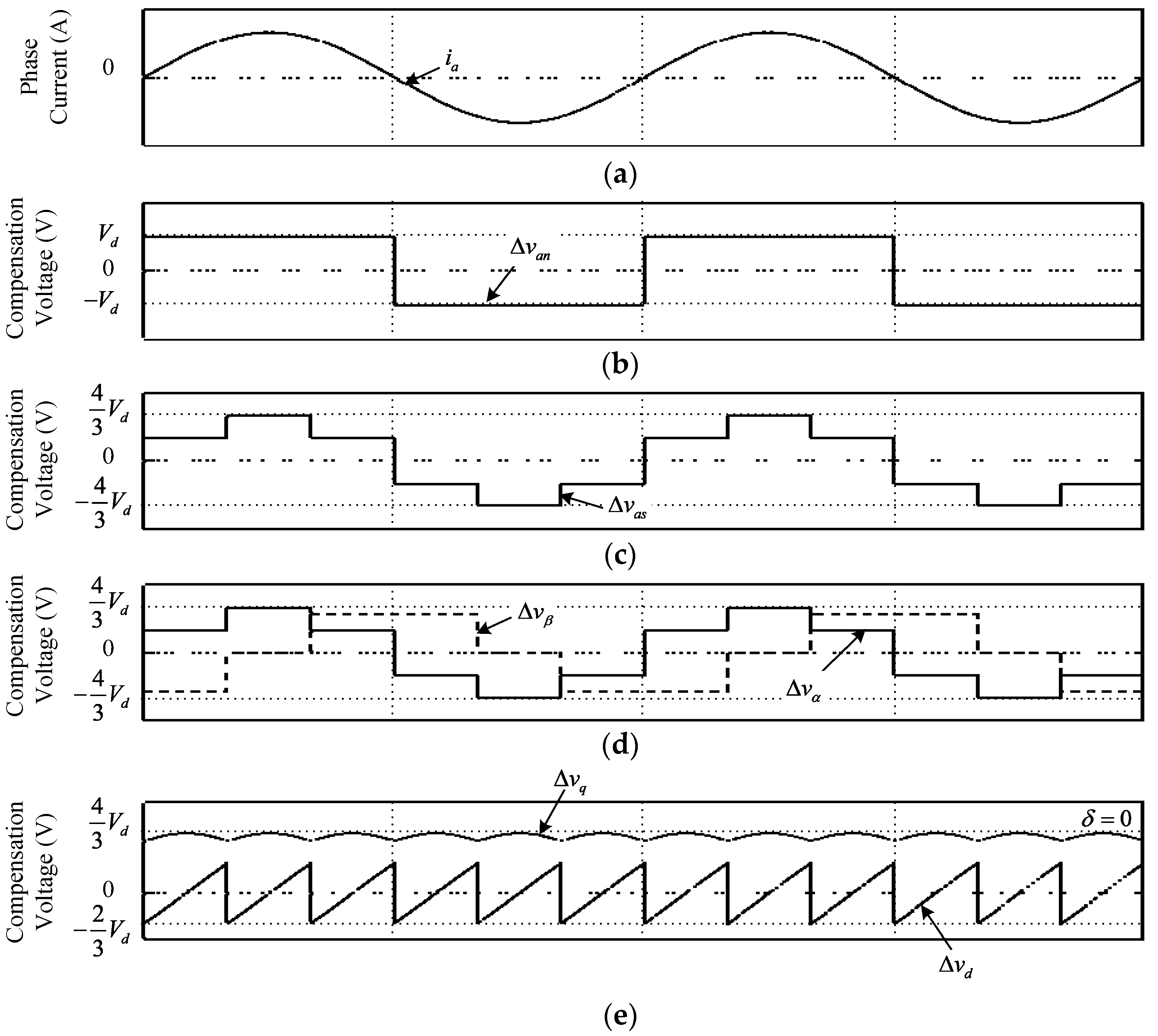
3. The Proposed DTCS
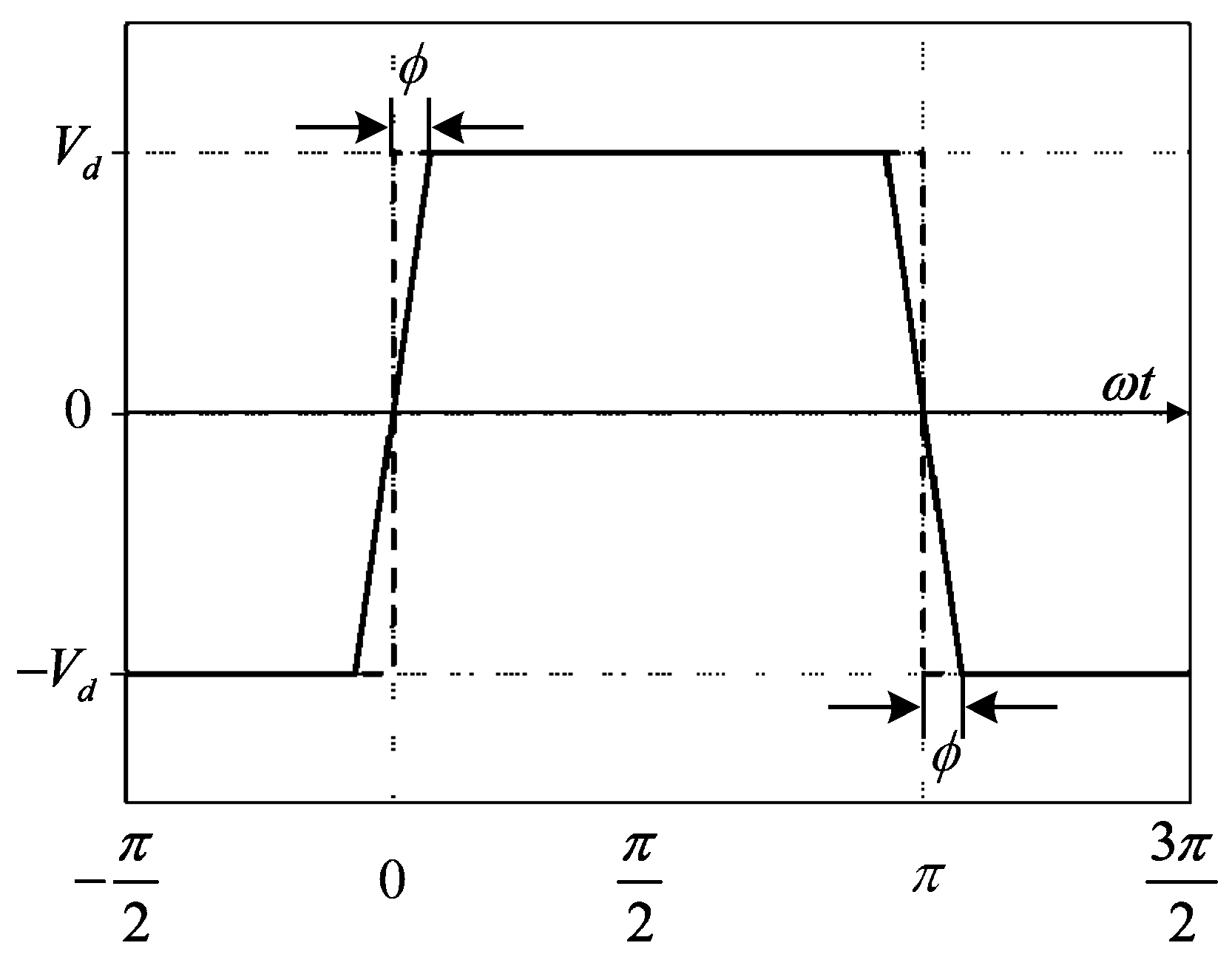
3.1. Implementation of the TCV Based on the Current Position
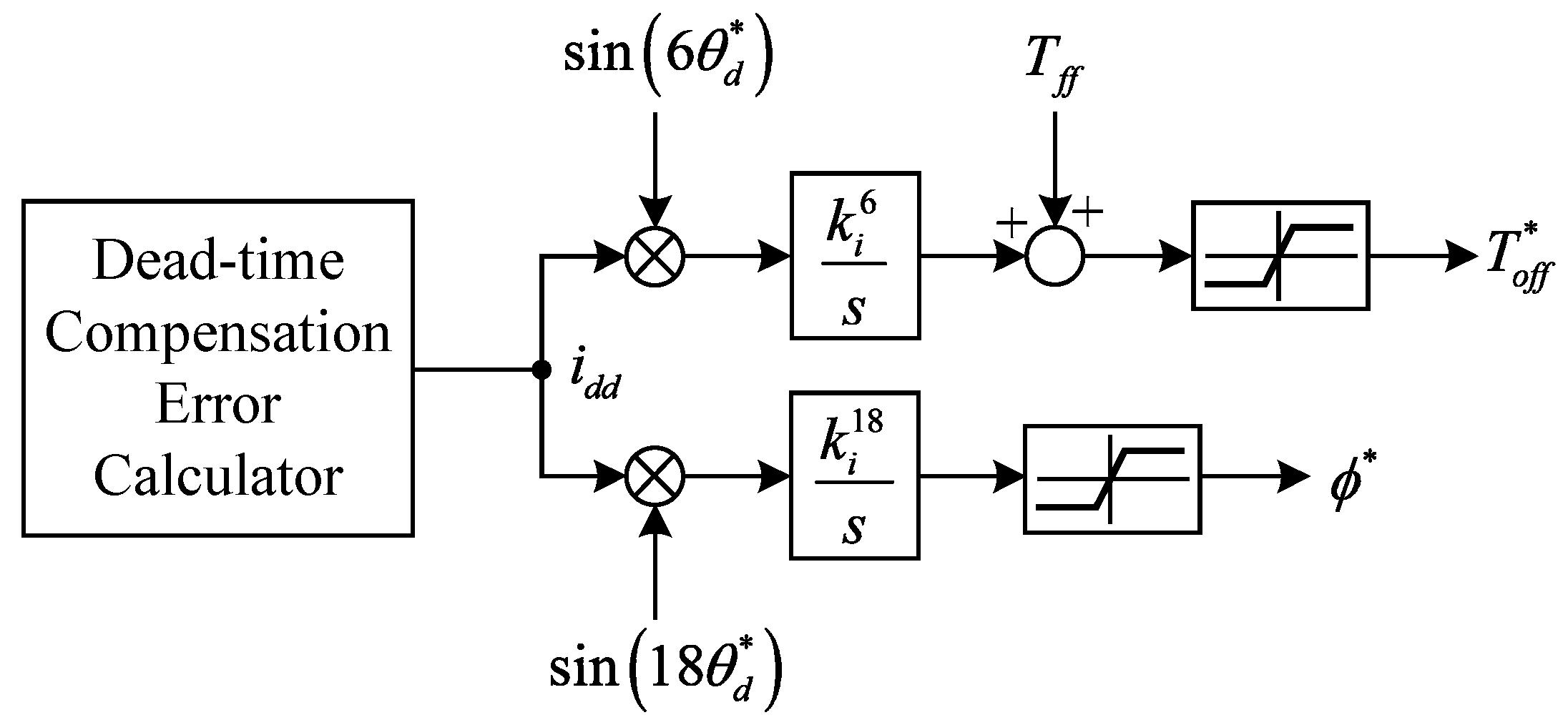
3.2. The On-Line TCV Controller
4. The Analysis of the Linear Modulation Region of the Three-Phase VSI with Proposed DTCS
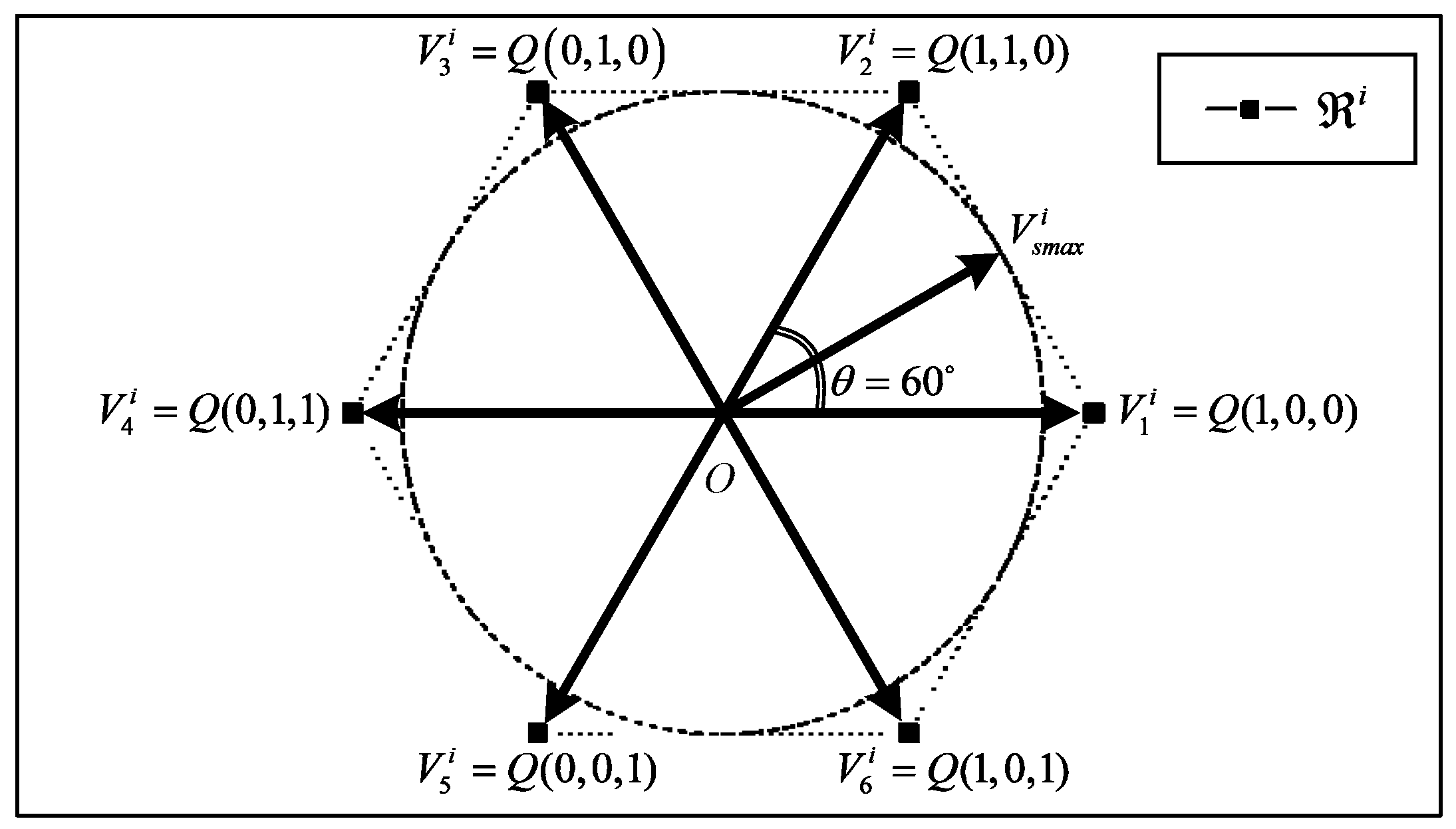
4.1. Definition of the MMPV of the Three-Phase VSI
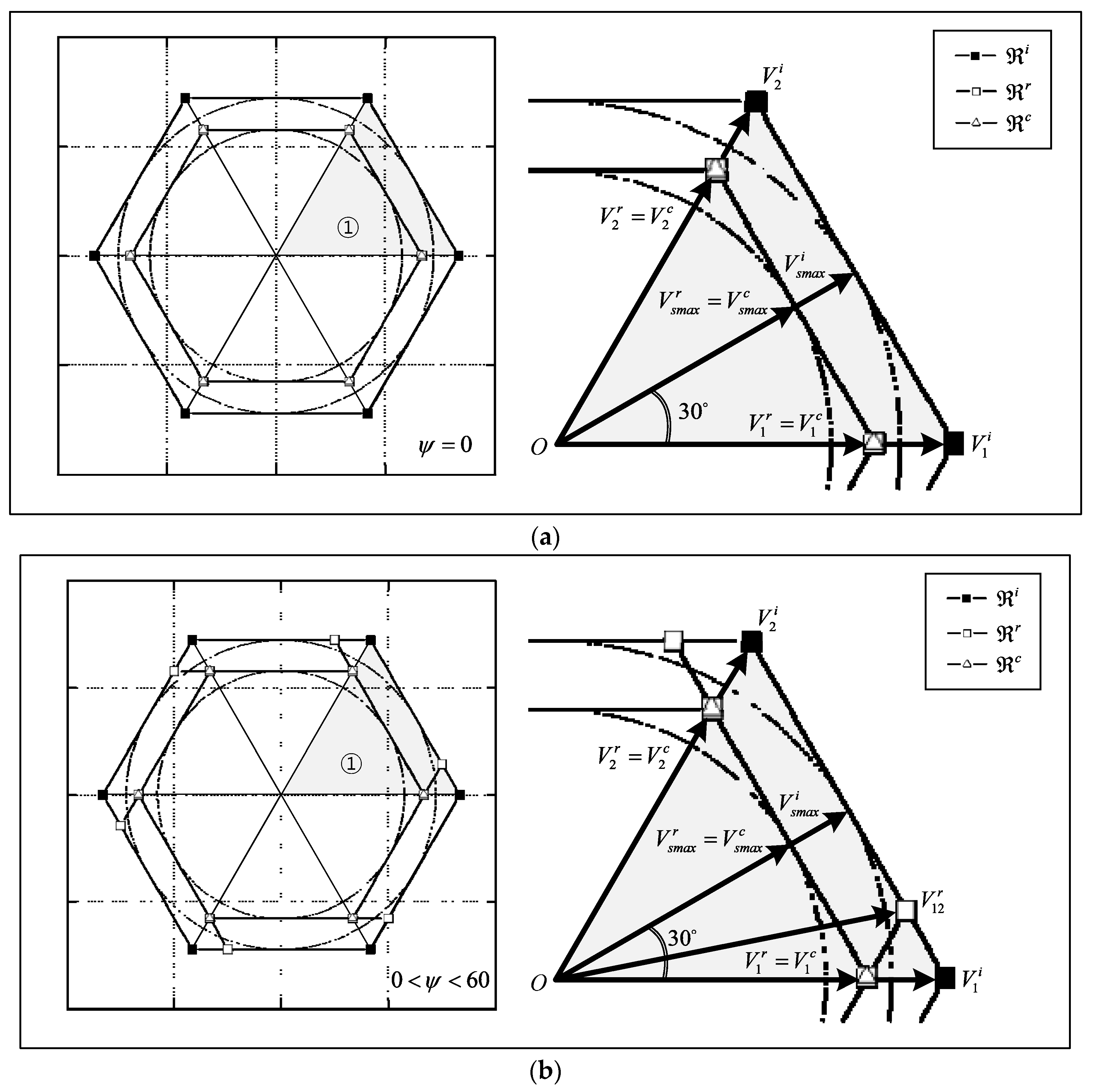
4.2. Analysis of the Linear Modulation Region with Dead-Time and When the Proposed DTCS is Applied
4.2.1. Where
4.2.2. Where
4.2.3. Where
4.2.4. Where
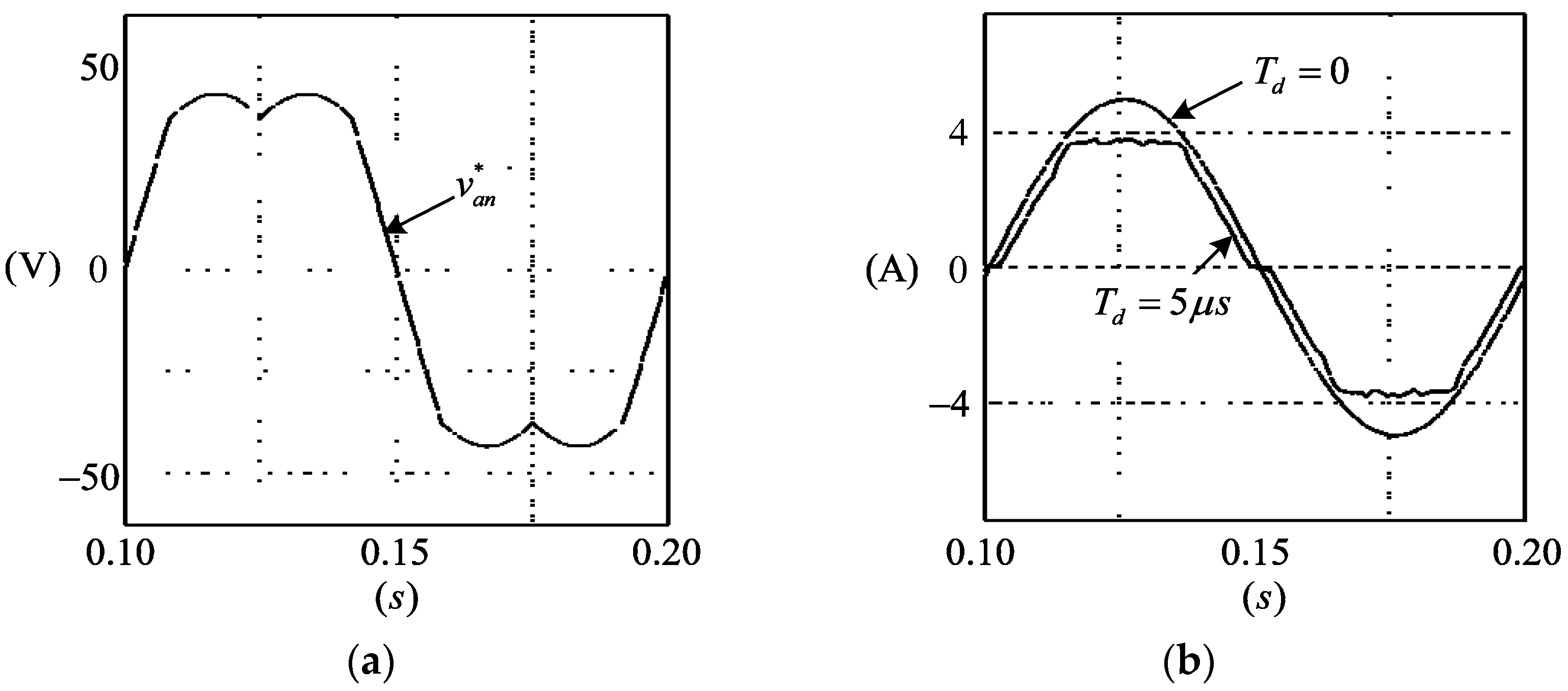
5. The Results of the Simulation and Experiment of the Proposed DTCS
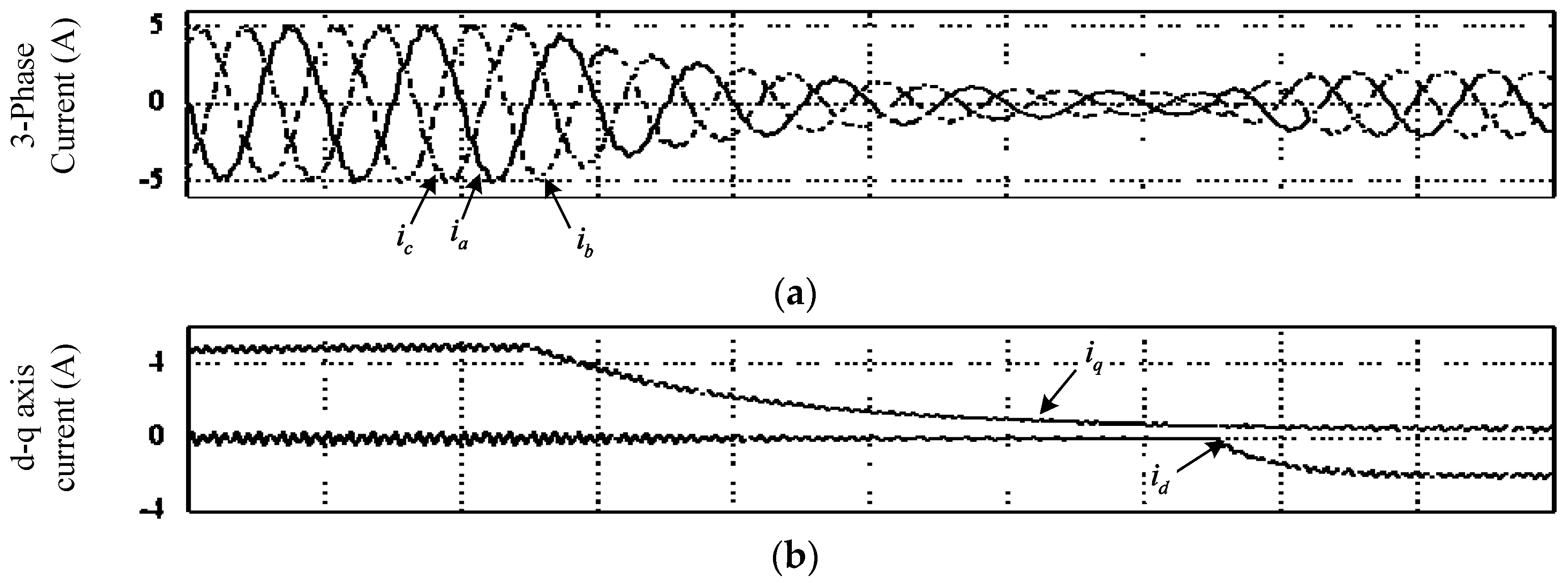
5.1. Simulation Results
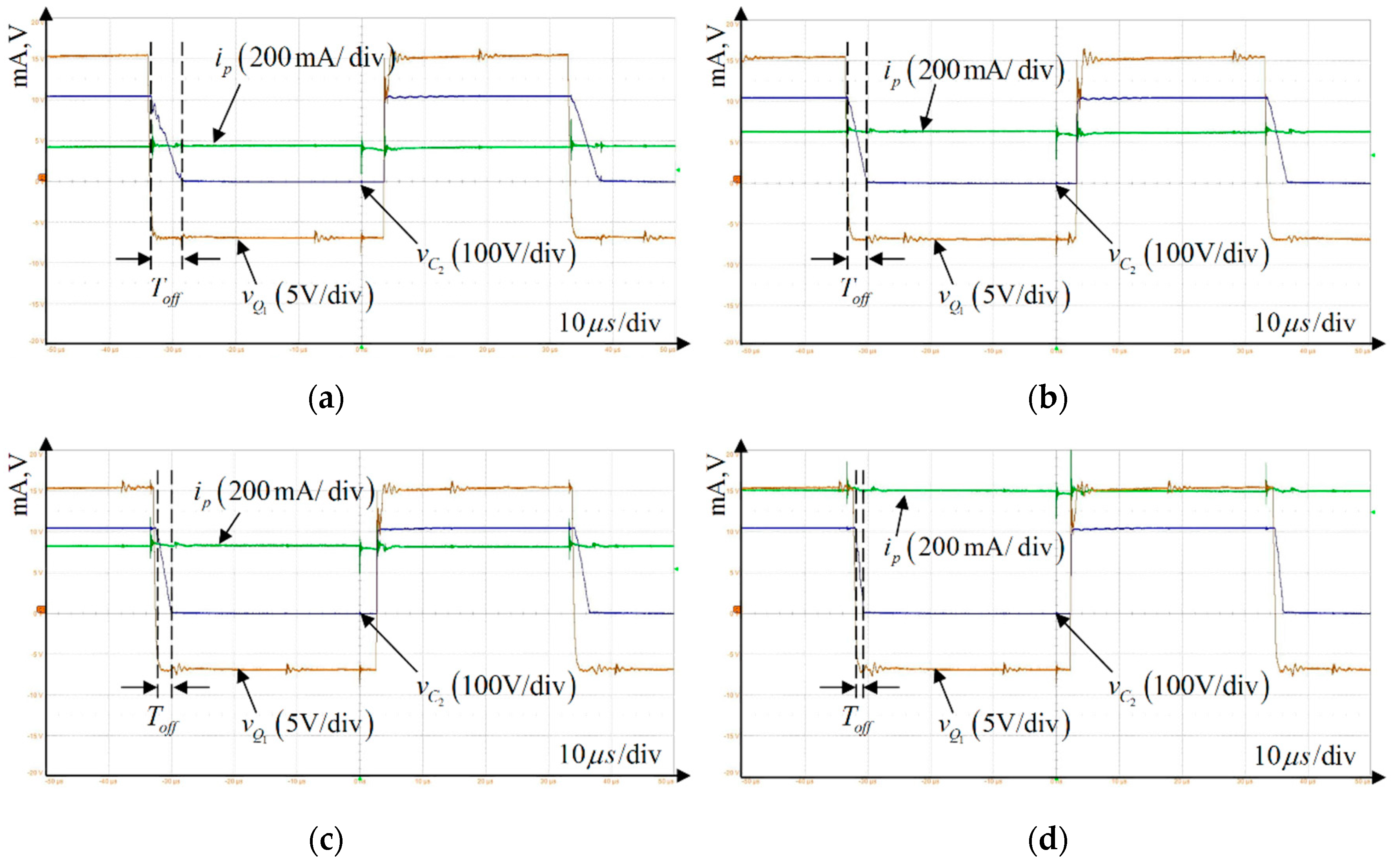
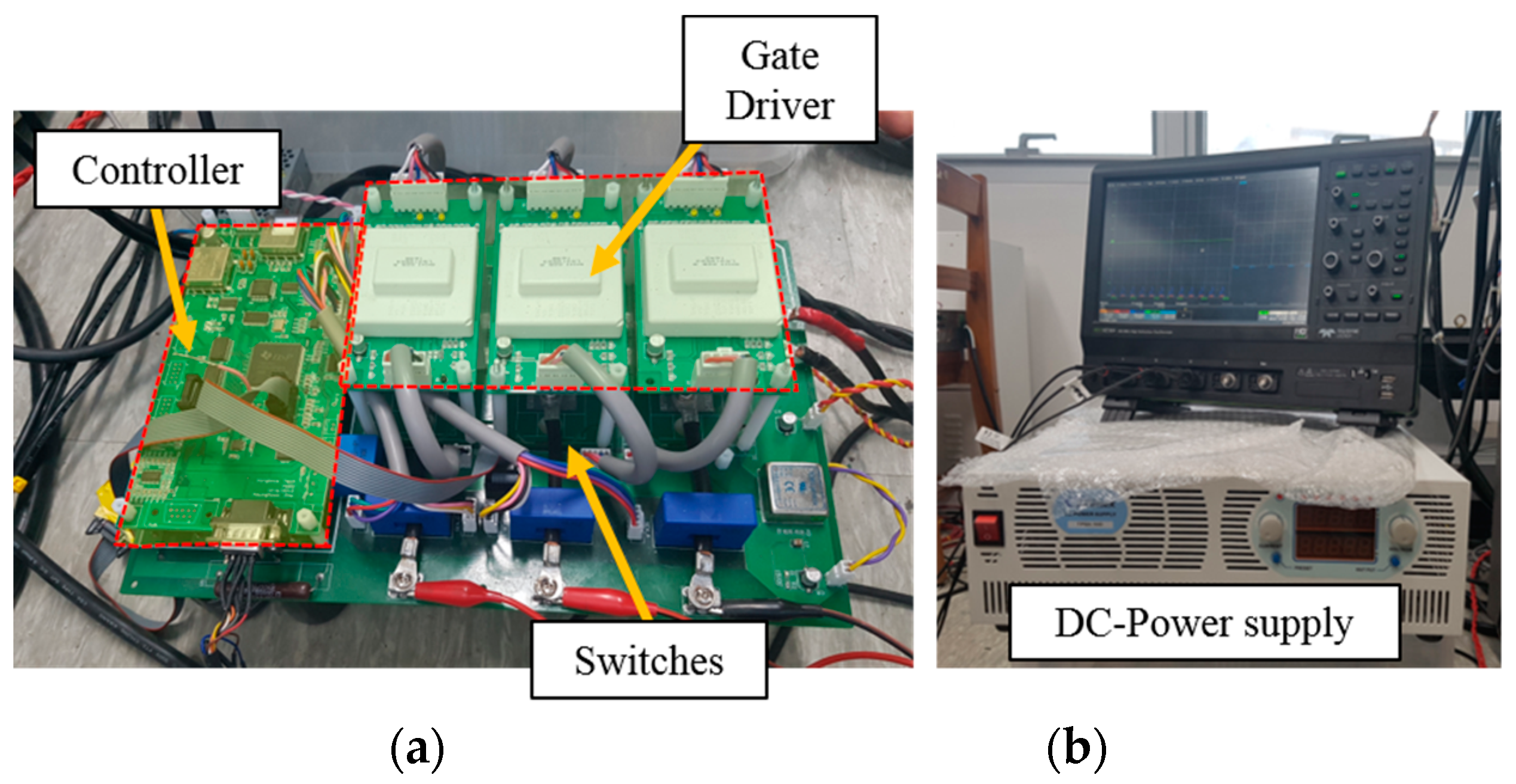
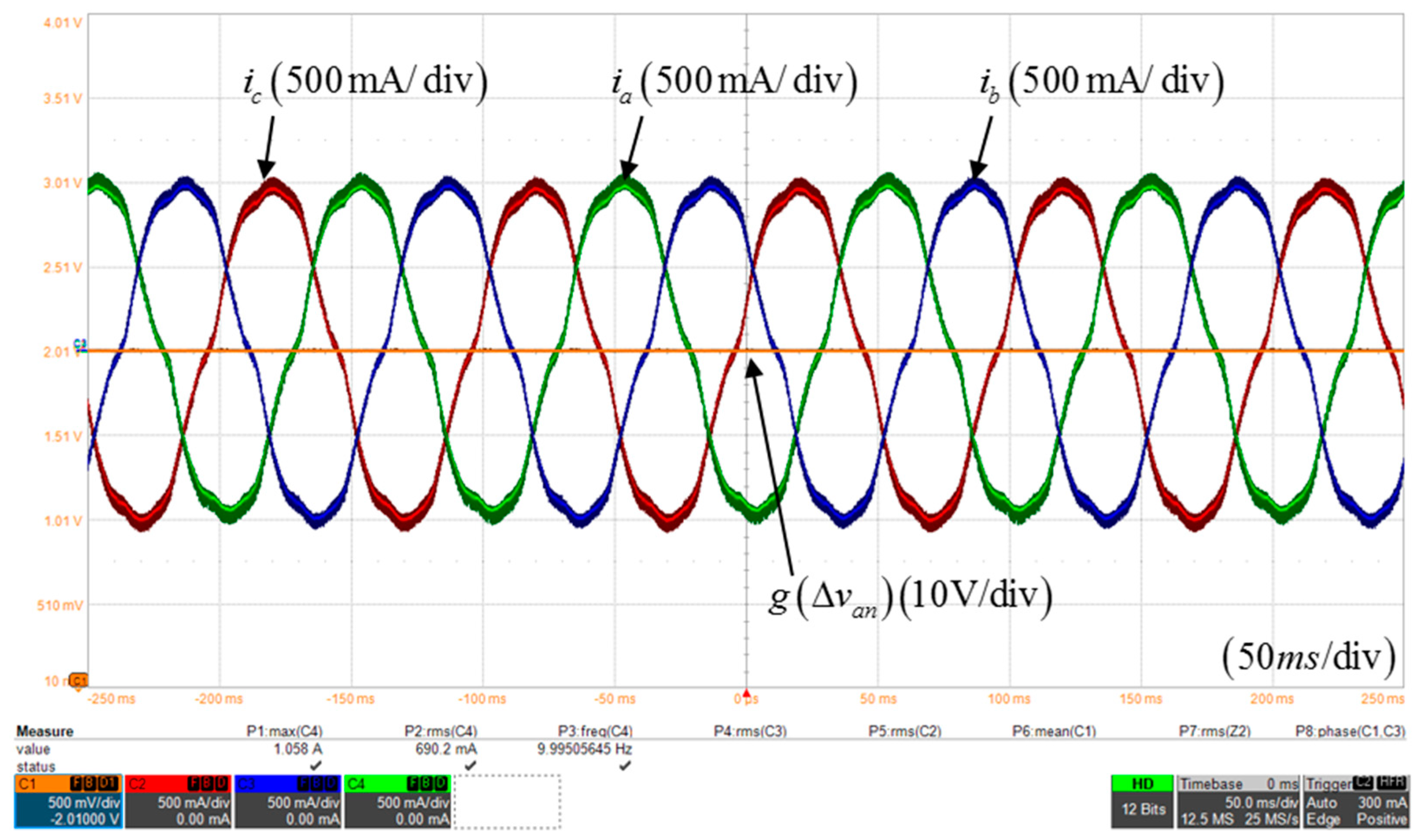
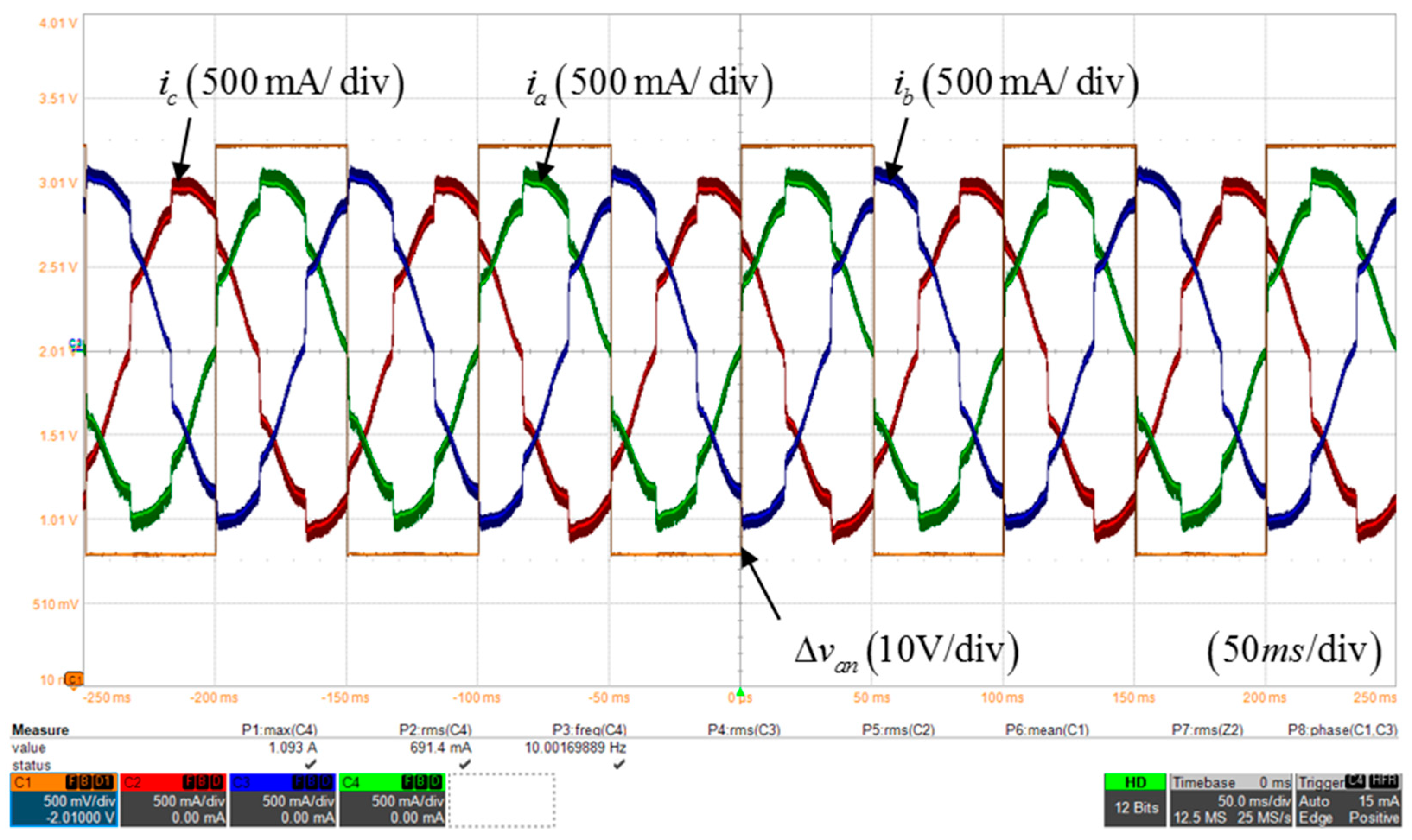
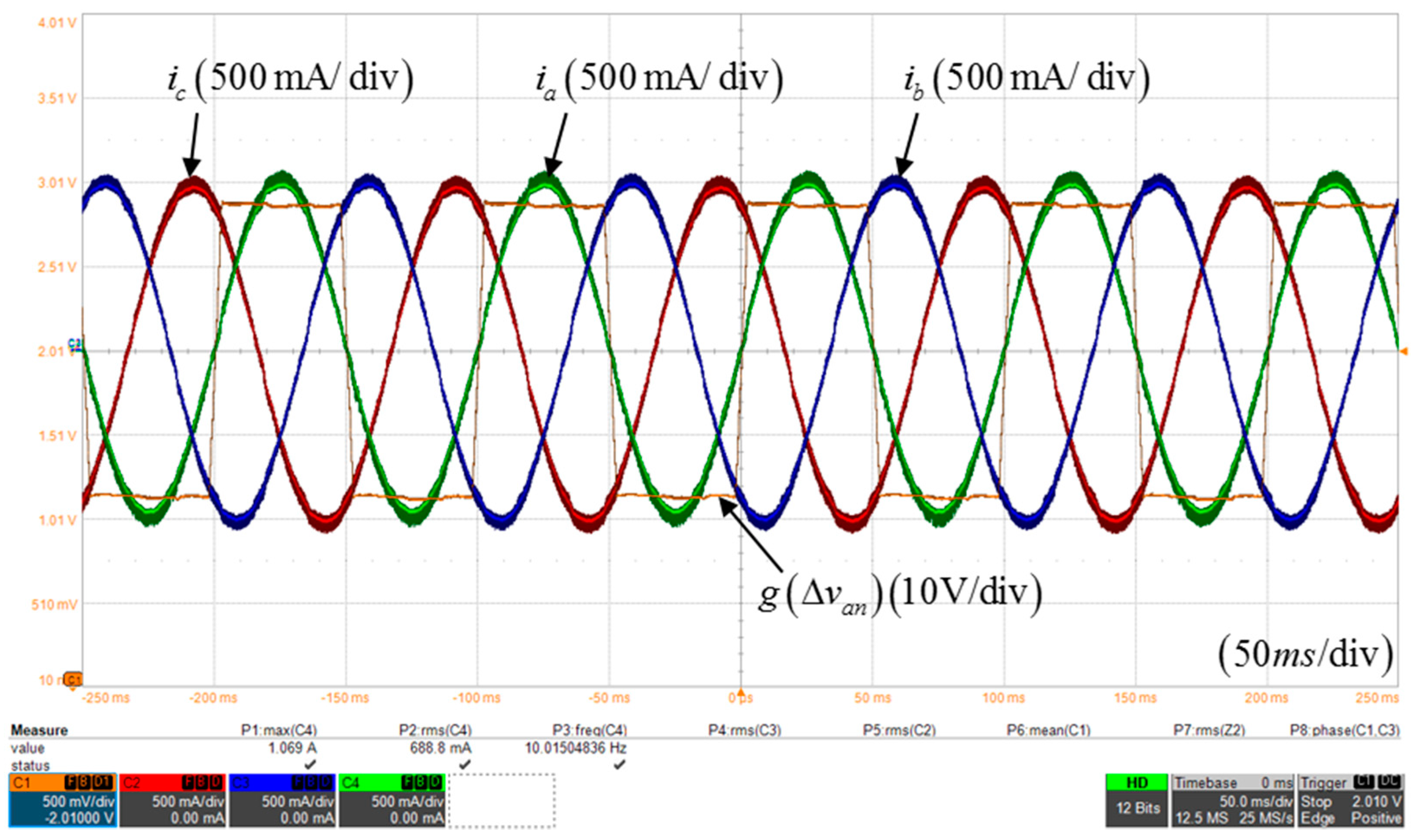
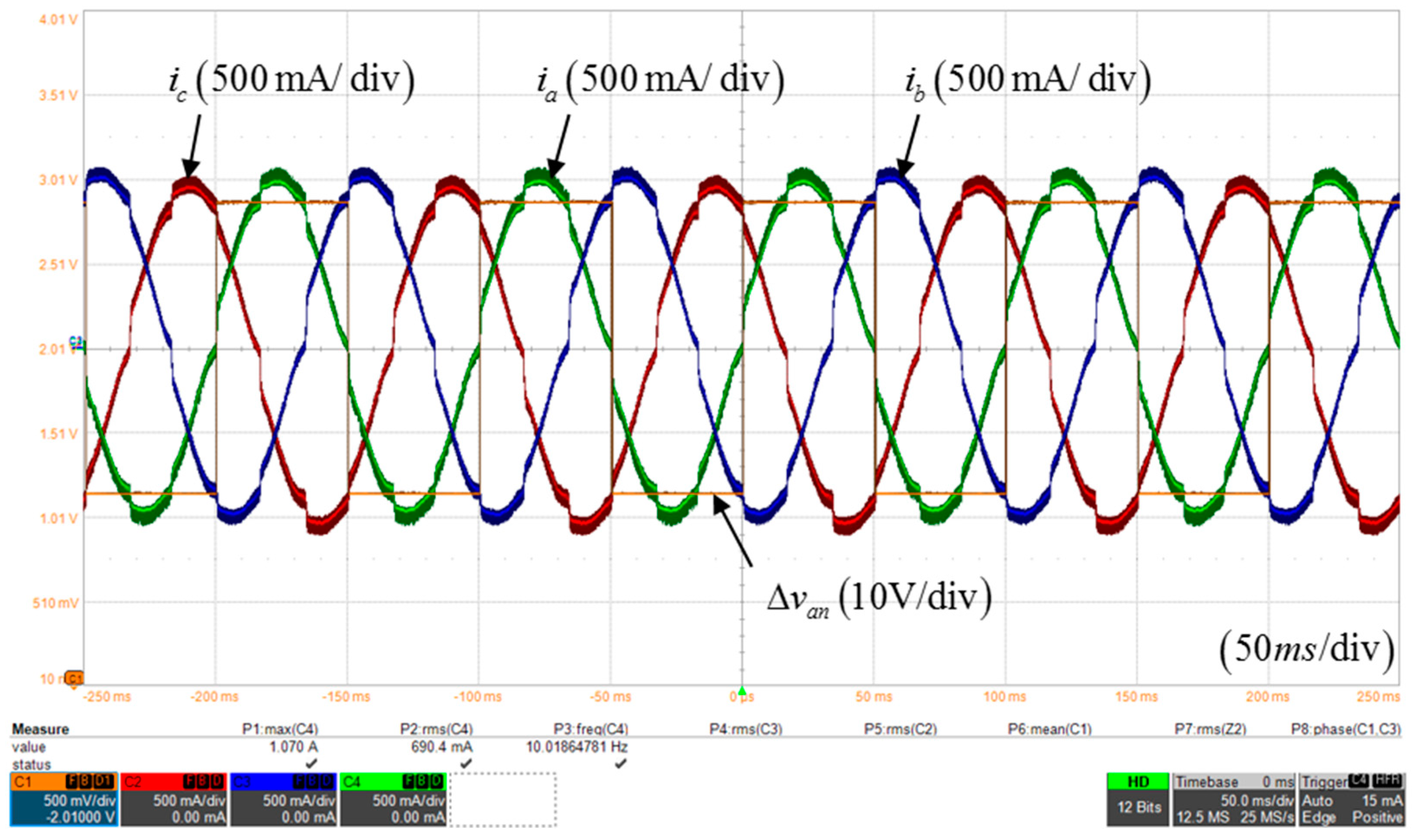
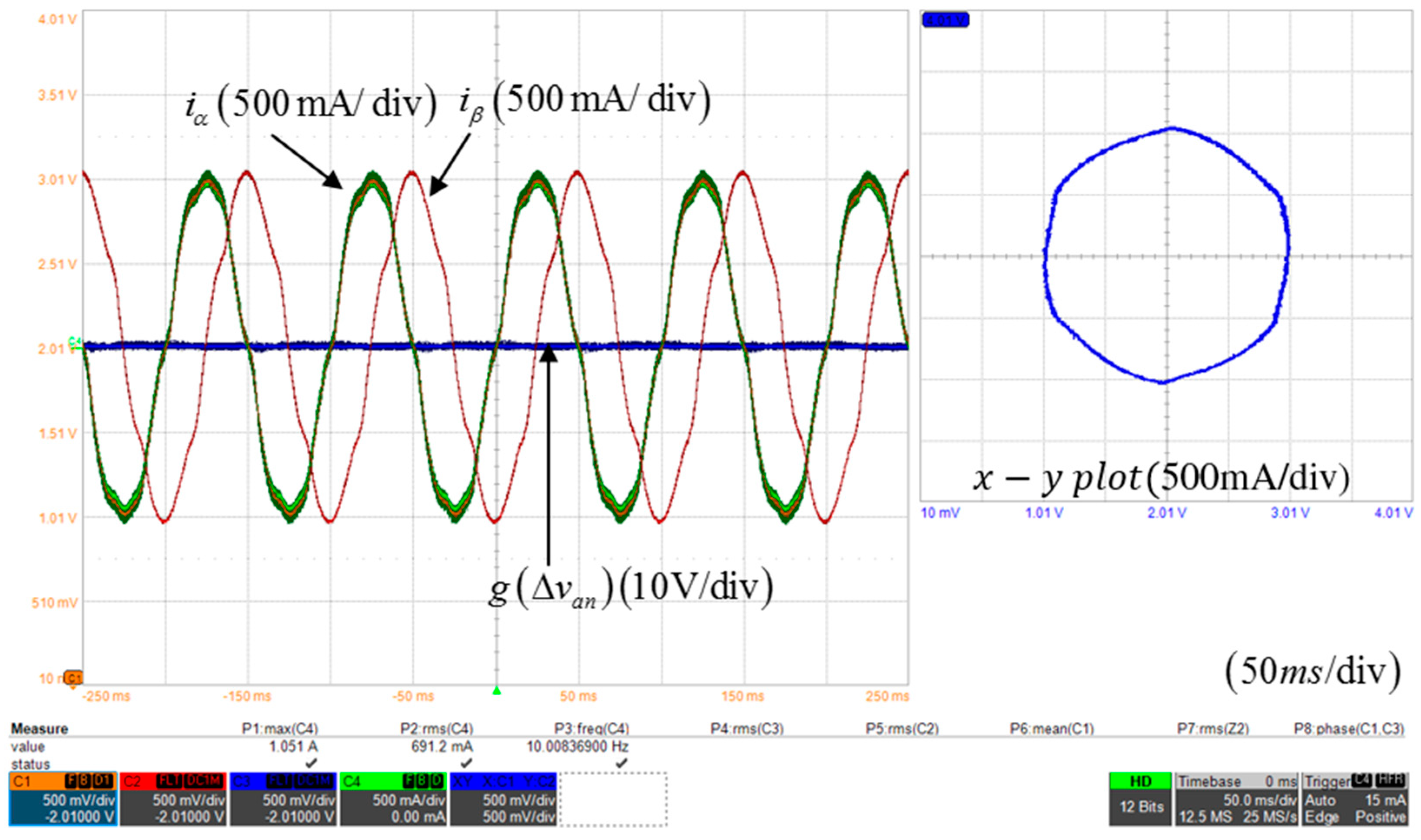
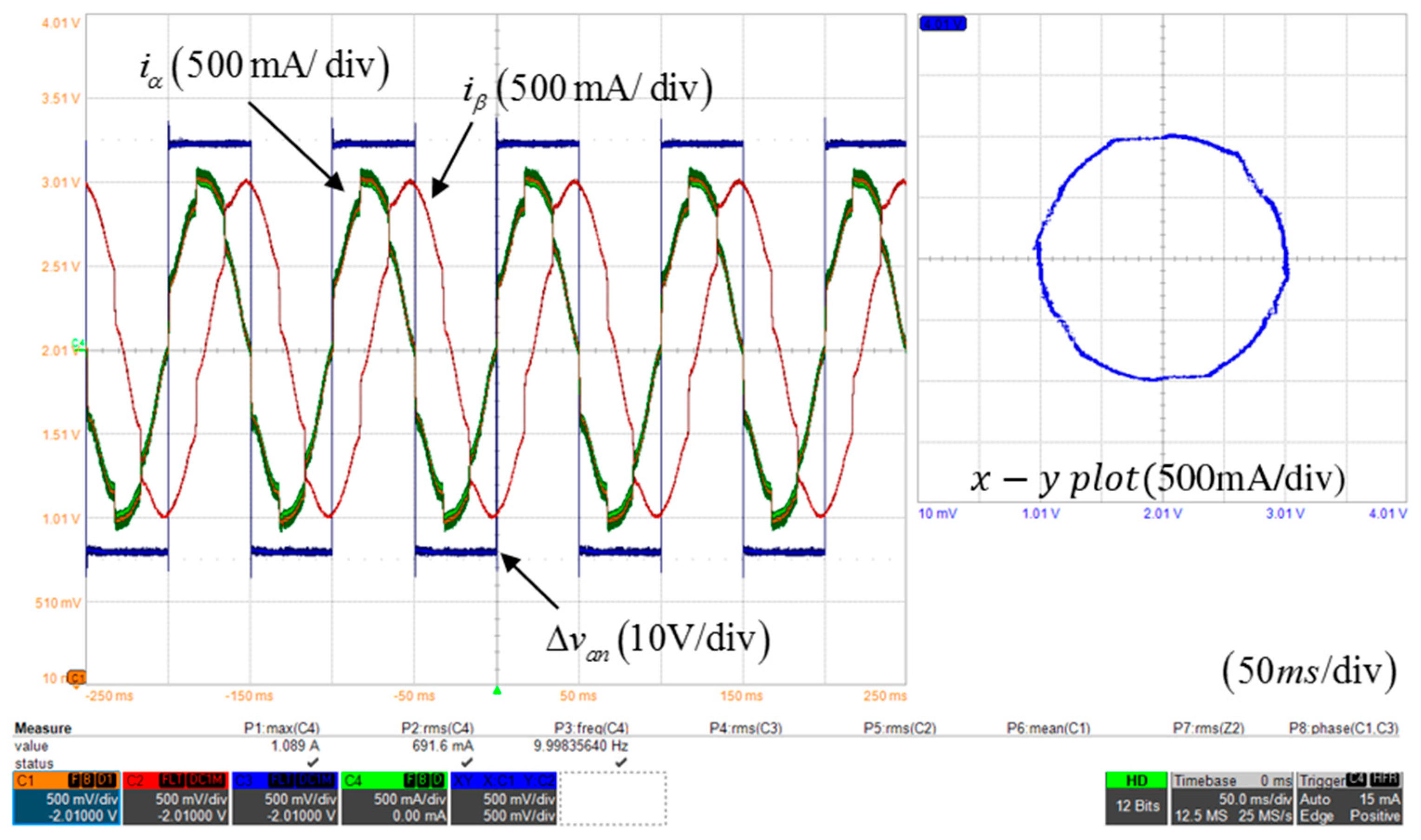
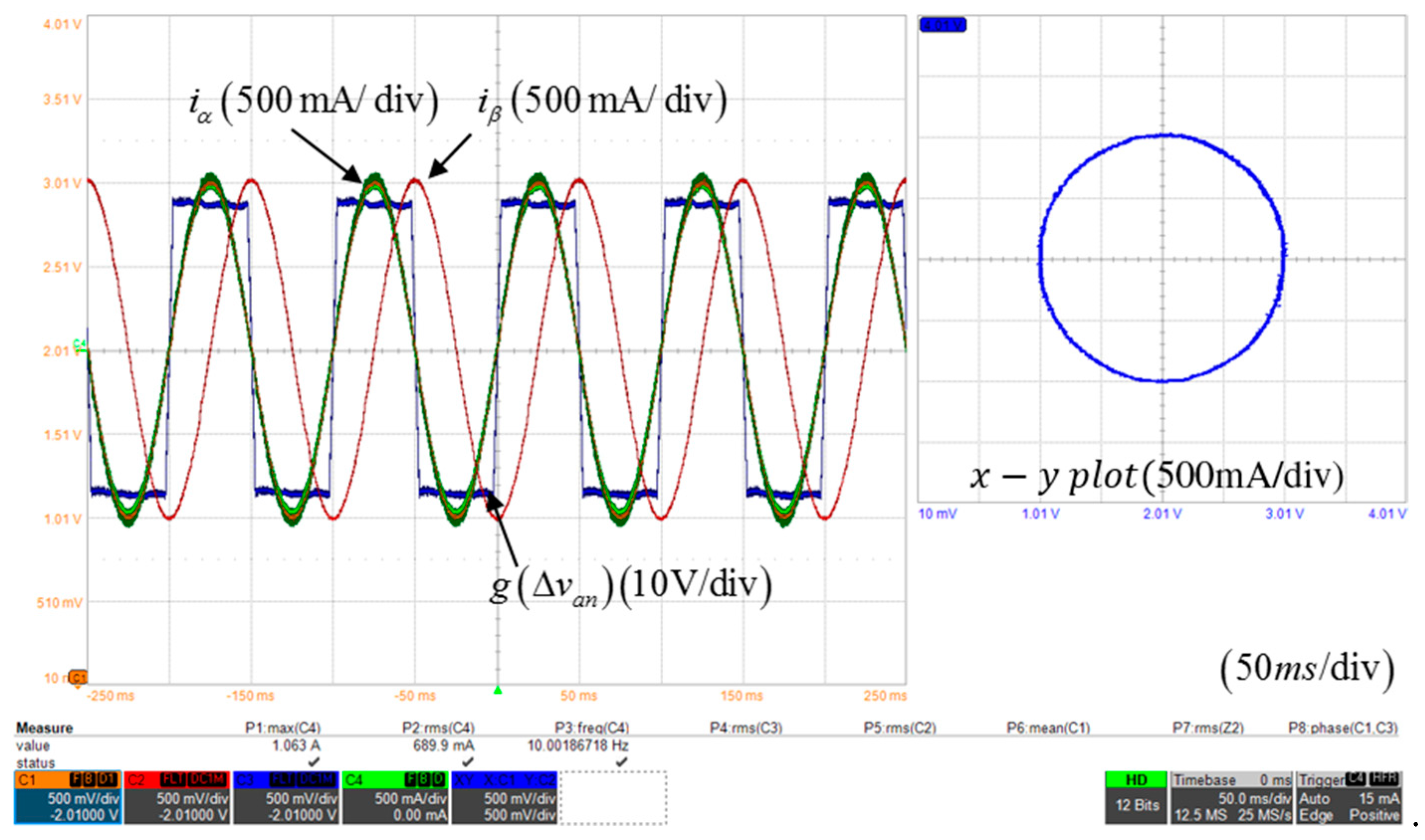
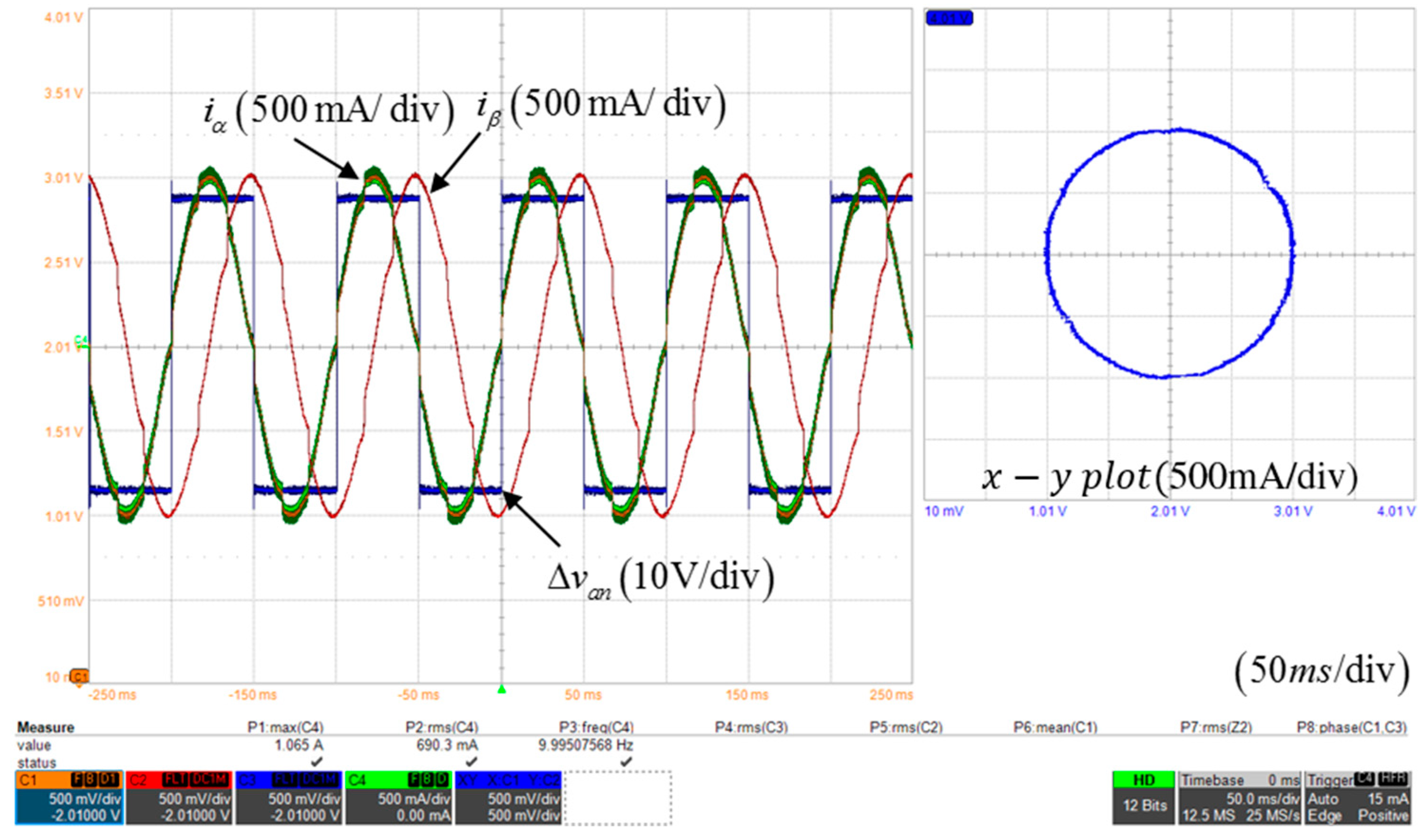
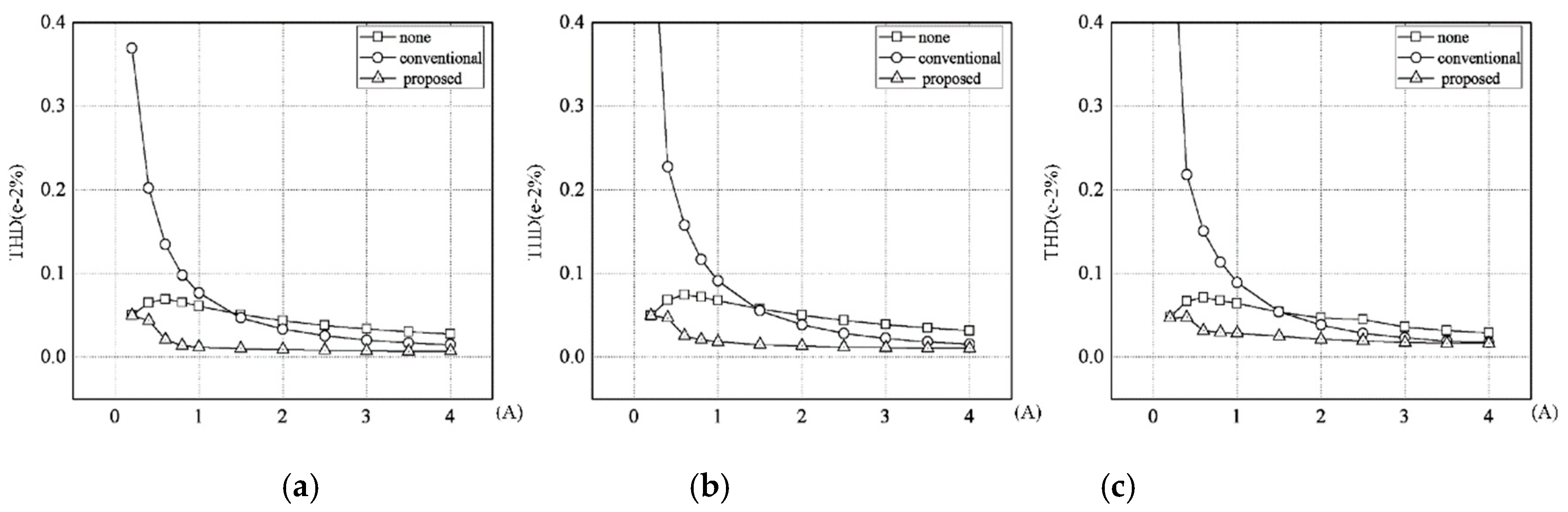
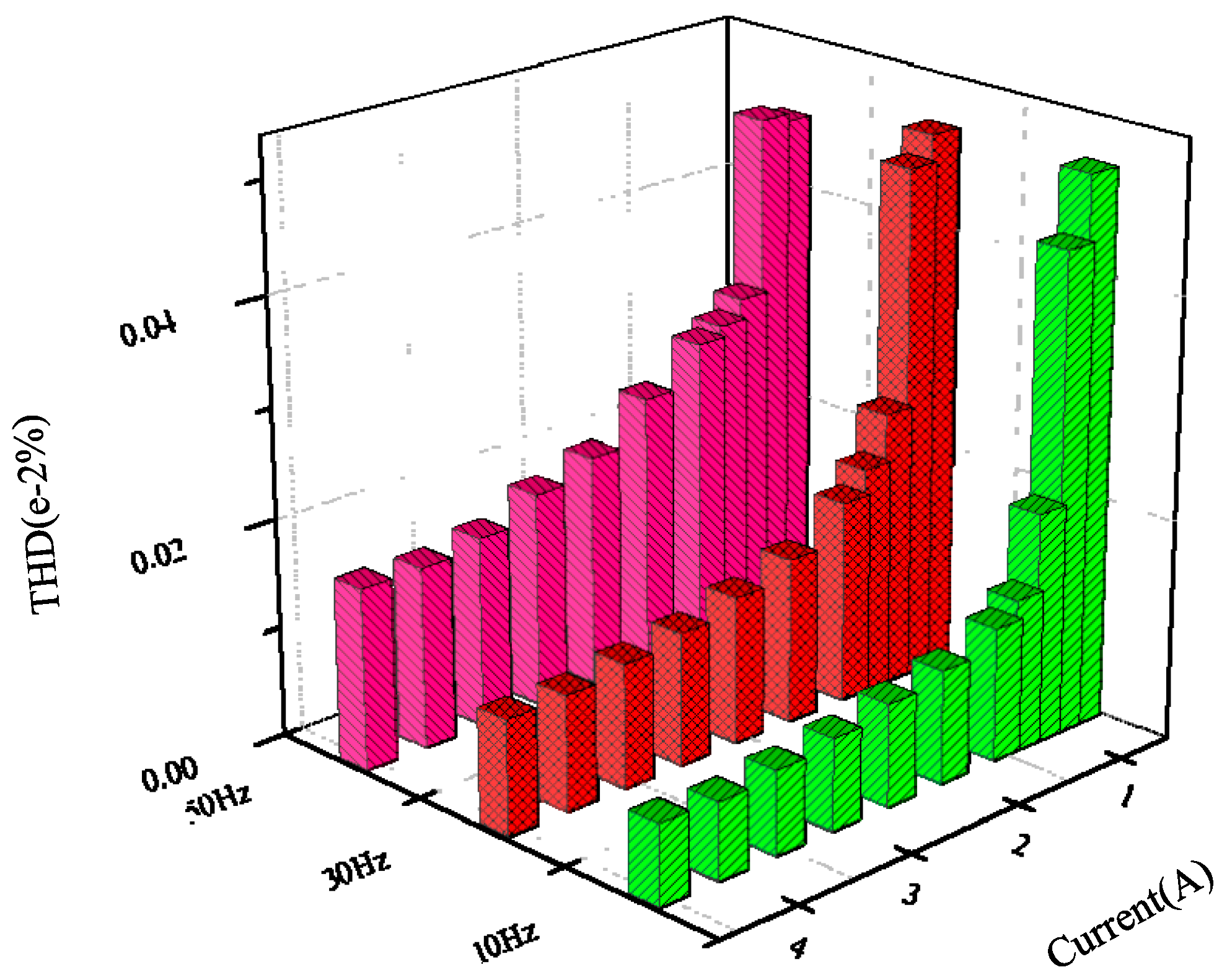
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sukegawa, T.; Kamiyama, K.; Matsui, T.; Okuyama, T. Fully digital, vector-controlled PWM VSI-fed ac drives with an inverter dead-time compensation strategy. In Proceedings of the Conference Record of the 1988 IEEE Industry Applications Society Annual Meeting, New York, NY, USA, 2–7 October 1988; IEEE: Piscataway, NJ, USA, 1988; pp. 463–469. [Google Scholar]
- Choi, J.W.; Sul, S.K. Inverter output voltage synthesis using novel dead time compensation. IEEE Trans. Power Electron. 1996, 11, 221–227. [Google Scholar] [CrossRef]
- Pellegrino, G.; Guglielmi, P.; Armando, E.; Bojoi, R.I. Self-commissioning algorithm for inverter nonlinearity compensation in sensorless induction motor drives. IEEE Trans. Ind. Appl. 2010, 46, 1416–1424. [Google Scholar] [CrossRef]
- Morimoto, S.; Sanada, M.; Takeda, Y. High-performance current-sensorless drive for PMSM and SynRM with only low-resolution position sensor. IEEE Trans. Ind. Appl. 2003, 39, 792–801. [Google Scholar] [CrossRef]
- Kim, S.Y.; Lee, W.; Rho, M.S.; Park, S.Y. Effective dead-time compensation using a simple vectorial disturbance estimator in PMSM drives. IEEE Trans. Ind. Electron. 2010, 57, 1609–1614. [Google Scholar]
- Urasaki, N.; Senjyu, T.; Kinjo, T.; Funabashi, T.; Sekine, H. Dead-time compensation strategy for permanent magnet synchronous motor drive taking zero-current clamp and parasitic capacitance effects into account. IEE Proc. Electr. Power Appl. 2005, 152, 845–853. [Google Scholar] [CrossRef]
- Munoz, A.R.; Lipo, T.A. On-line dead-time compensation technique for open-loop PWM-VSI drives. IEEE Trans. Power Electron. 1999, 14, 683–689. [Google Scholar] [CrossRef]
- Guha, A.; Narayanan, G. An improved dead-time compensation scheme for voltage source inverters considering the device switching transition times. In Proceedings of the 2014 IEEE 6th India International Conference on Power Electronics (IICPE), NIT Kurukshetra, India, 8–10 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]
- Hwang, S.-H.; Kim, J.-M. Dead time compensation method for voltage-fed PWM inverter. IEEE Trans. Energy Convers. 2010, 25, 1–10. [Google Scholar] [CrossRef]
- Ryu, H.-S.; Lim, I.H.; Lee, J.H.; Hwang, S.H.; Kim, J.M. A dead time compensation method in voltage-fed PWM inverter. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference, 41st IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 911–916. [Google Scholar]
- Zhao, H.; Wu, Q.J.; Kawamura, A. An accurate approach of nonlinearity compensation for VSI inverter output voltage. IEEE Trans. Power Electron. 2004, 19, 1029–1035. [Google Scholar] [CrossRef]
- Kim, S.-Y.; Park, S.-Y. Compensation of dead-time effects based on adaptive harmonic filtering in the vector-controlled AC motor drives. IEEE Trans. Ind. Electron. 2007, 54, 1768–1777. [Google Scholar] [CrossRef]
- Urasaki, N.; Senjyu, T.; Uezato, K.; Funabashi, T. An adaptive dead-time compensation strategy for voltage source inverter fed motor drives. IEEE Trans. Power Electron. 2005, 20, 1150–1160. [Google Scholar] [CrossRef]
- Kim, H.-S.; Moon, H.-T.; Youn, M.-J. On-line dead-time compensation method using disturbance observer. IEEE Trans. Power Electron. 2003, 18, 1336–1345. [Google Scholar]
- Park, Y.; Sul, S.-K. Implementation schemes to compensate for inverter nonlinearity based on trapezoidal voltage. IEEE Trans. Ind. Appl. 2014, 50, 1066–1073. [Google Scholar] [CrossRef]
- Park, Y.; Sul, S.-K. A novel method utilizing trapezoidal voltage to compensate for inverter nonlinearity. IEEE Trans. Power Electron. 2012, 27, 4837–4846. [Google Scholar] [CrossRef]
- Tang, Z.; Akin, B. Suppression of dead-time distortion through revised repetitive controller in PMSM Drives. IEEE Trans. Energy Convers. 2017, 32, 918–930. [Google Scholar] [CrossRef]
- Liu, G.; Wang, D.; Jin, Y.; Wang, M.; Zhang, P. Current-Detection-Independent Dead-Time Compensation Method Based on Terminal Voltage A/D Conversion for PWM VSI. IEEE Trans. Ind. Electron. 2017, 64, 7689–7699. [Google Scholar] [CrossRef]
- Dafang, W.; Bowen, Y.; Cheng, Z.; Chuanwei, Z.; Ji, Q. A feedback-type phase voltage compensation strategy based on phase current reconstruction for ACIM drives. IEEE Trans. Power Electron. 2014, 29, 5031–5043. [Google Scholar] [CrossRef]
- Zhang, Z.; Xu, L. Dead-time compensation of inverters considering snubber and parasitic capacitance. IEEE Trans. Power Electron. 2014, 29, 3179–3187. [Google Scholar] [CrossRef]




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vector | Phase Voltage | Space Voltage Vector | ||
|---|---|---|---|---|
| 0 | 0 | 0 | ||
| Phase Delay of the Current | |
|---|---|
| from Equation (42) | |
| , | from Equation (43) |
| , | from Equation (46) |
| , | from Equation (50) |
| Parameters | Description | Value | Parameters | Description | Value |
|---|---|---|---|---|---|
| Dc-link voltage level | 310 V | Maximum collector-emitter voltage rating | 600 V | ||
| Phase resistance | 0.5 Ω | Gate threshold voltage | 4.5 V | ||
| Phase inductance | 10 mH | Fall time of the current | 300 ns | ||
| Switching frequency | 10 kHz | Input capacitance | 2.2 nF | ||
| Dead-time | 5.0 µs | Output capacitance | 2.2 nF | ||
| Fundamental frequency | 50 Hz | On resistance | 28 mΩ |
| Parameters | Description | Value |
|---|---|---|
| Switch () | Three-phase VSI switch | SKM50GB063D |
| Gate driver | Gate driver of VSI | SKHI 22B |
| MCU | Micro controller unit | DSP 320F28335 |
| DC power supply | DC-link voltage source | TP5H-10D |
| DC-link voltage level | 310 V | |
| Phase resistance | 5.5 Ω | |
| Phase inductance | 20.5 mH | |
| Switching Frequency | 10 kHz | |
| Dead-time | 5.0 µs |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, J.-W.; Bu, H.; Cho, Y. Novel Dead-Time Compensation Strategy for Wide Current Range in a Three-Phase Inverter. Electronics 2019, 8, 92. https://doi.org/10.3390/electronics8010092
Lim J-W, Bu H, Cho Y. Novel Dead-Time Compensation Strategy for Wide Current Range in a Three-Phase Inverter. Electronics. 2019; 8(1):92. https://doi.org/10.3390/electronics8010092
Chicago/Turabian StyleLim, Jeong-Woo, Hanyoung Bu, and Younghoon Cho. 2019. "Novel Dead-Time Compensation Strategy for Wide Current Range in a Three-Phase Inverter" Electronics 8, no. 1: 92. https://doi.org/10.3390/electronics8010092
APA StyleLim, J.-W., Bu, H., & Cho, Y. (2019). Novel Dead-Time Compensation Strategy for Wide Current Range in a Three-Phase Inverter. Electronics, 8(1), 92. https://doi.org/10.3390/electronics8010092