Improvement of Stability in a PCM-Controlled Boost Converter with the Target Period Orbit-Tracking Method


Abstract
:1. Introduction
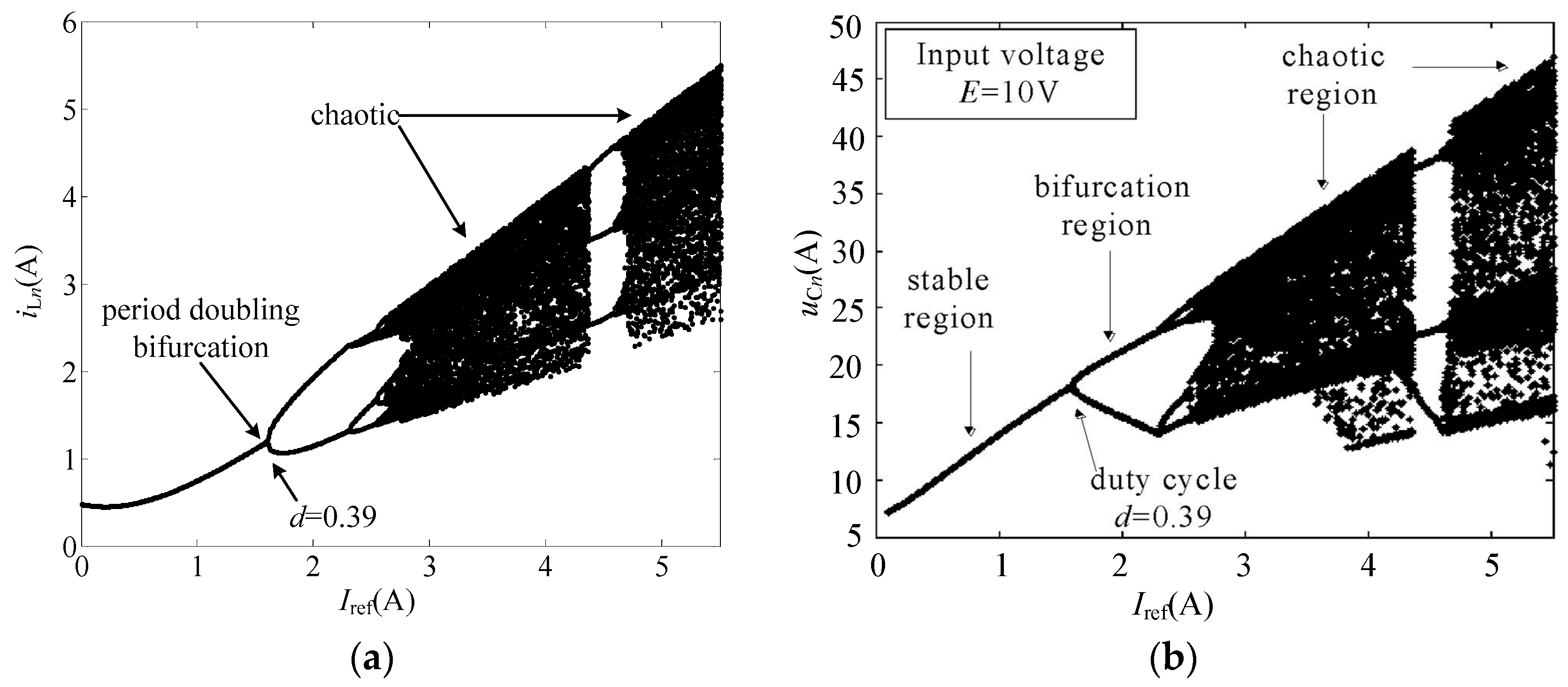
2. Typical Limitation of Boost Converter with Classical PCM Control Scheme
3. An Improving Scheme Based on the Target UPO Tracking Method
3.1. Principle of the Parameter-Perturbation Method
3.2. Implementation Scenario
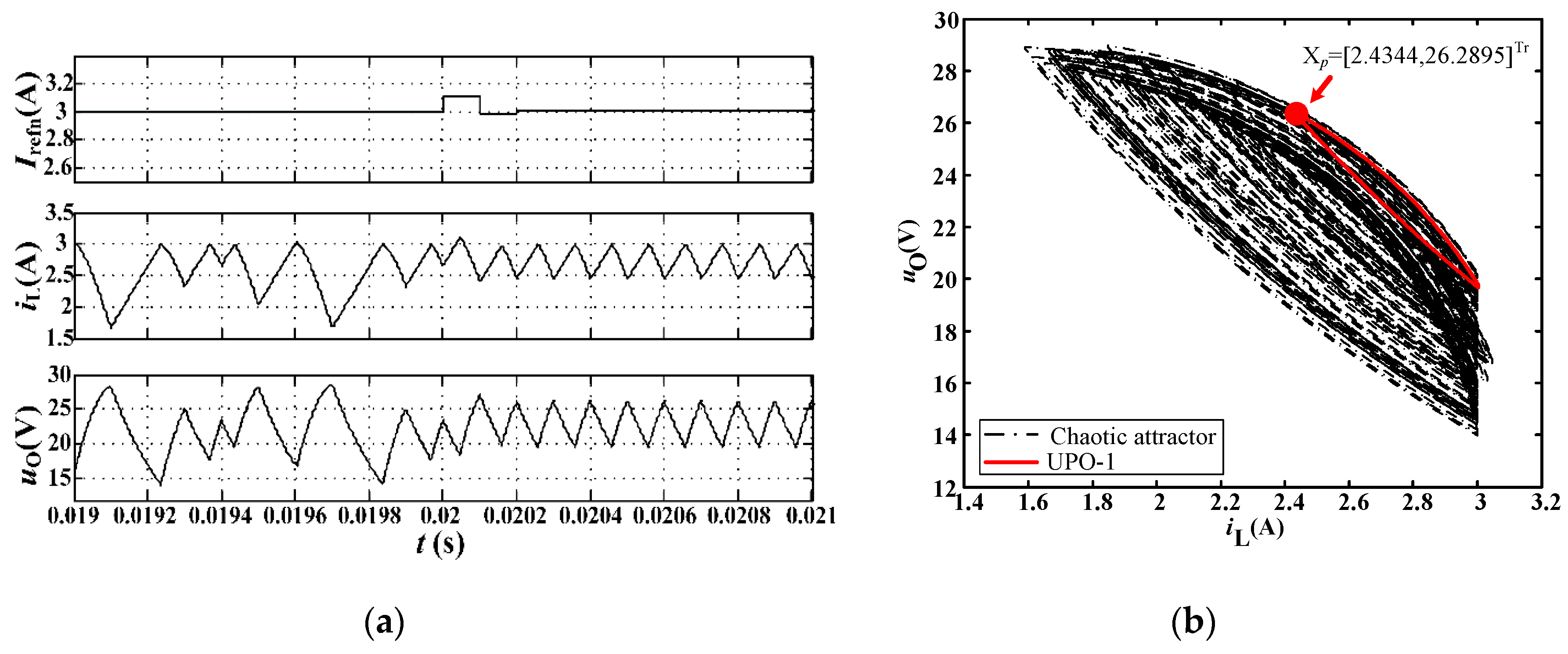
3.3. Performance Assessment
4. Comparison and Discussion
5. Experiments
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bernardo, M.; Budd, C.; Champneys, A.R.; Kowalczyk, P. Piecewise Smooth Dynamical Systems: Theory and Applications; Springer: London, UK, 2008. [Google Scholar]
- Leppäaho, J.; Suntio, T. Characterizing the Dynamics of the Peak-Current-Mode-Controlled Buck-Power-Stage Converter in Photovoltaic Applications. IEEE Trans. Power Electron. 2014, 29, 3840–3847. [Google Scholar] [CrossRef]
- Lu, W.; Lang, S.; Zhou, L.; Iu, H.H.; Fernando, T. Improvement of Stability and Power Factor in PCM Controlled Boost PFC Converter with Hybrid Dynamic Compensation. IEEE Trans. Circuits Syst. I 2015, 62, 320–328. [Google Scholar] [CrossRef]
- Tse, C.K. Complex Behavior of Switching Power Converters; CRC Press: New York, NY, USA, 2004. [Google Scholar]
- Tse, C.K.; Li, M. Design-oriented Bifurcation Analysis of Power Electronics Systems. Int. J. Bifurc. Chaos 2011, 21, 175–187. [Google Scholar] [CrossRef]
- Chen, Y.; Chi, K.T.; Qiu, S.S.; Lindenmuller, L.; Schwarz, W. Coexisting fast-scale and slow-scale instability in current-mode controlled DC/DC converters: Analysis, Simulation and Experimental Results. IEEE Trans. Circuits Syst. I 2008, 55, 3335–3348. [Google Scholar] [CrossRef]
- Yang, R.; Zhang, B.; Xie, F.; Iu HH, C.; Hu, W. Detecting bifurcation types in DC-DC switching converter by duplicate symbolic sequence and weight complexity. IEEE Trans. Ind. Electron. 2013, 60, 3145–3156. [Google Scholar] [CrossRef]
- Huang, L.; Qiu, D.; Xie, F.; Chen, Y.; Zhang, B. Modeling and Stability Analysis of a Single-Phase Two-Stage Grid-Connected Photovoltaic System. Energies 2017, 10, 2176. [Google Scholar] [CrossRef]
- Luo, Z.; Xie, F.; Zhang, B.; Qiu, D. Quantifying the Nonlinear Dynamic Behavior of the DC-DC Converter via Permutation Entropy. Energies 2018, 11, 2747. [Google Scholar] [CrossRef]
- Bao, B.; Zhou, G.; Xu, J.; Liu, Z. Unified Classification of Operation-State Regions for Switching Converters with Ramp Compensation. IEEE Trans. Power Electron. 2011, 26, 1968–1975. [Google Scholar] [CrossRef]
- Ma, W.; Wang, M.; Liu, S.; Li, S.; Yu, P. Stabilizing the average current-mode-controlled boost PFC converter via washout-filter-aided method. IEEE Trans. Circuits Syst. Express Briefs 2011, 58, 595–599. [Google Scholar] [CrossRef]
- Fan, J.W.T.; Chung, H.S.H. Bifurcation Phenomena and Stabilization with Compensation Ramp in Converter with Power Semiconductor Filter. IEEE Trans. Power Electron 2017, 32, 9424–9434. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, R.; Zhang, B.; Hu, W. Smale horseshoes and symbolic dynamics in buck-boost DC-DC converter. IEEE Trans. Ind. Electron. 2018, 65, 800–809. [Google Scholar] [CrossRef]
- Suntio, T. Analysis and Modeling of Peak-Current-Mode-Controlled Buck Converter in DICM. IEEE Trans. Ind. Electron. 2001, 48, 127–135. [Google Scholar] [CrossRef]
- Suntio, T. Dynamic Profile of Switched-Mode Converter: Modeling, Analysis and Control; Wiley-VCH: Weinheim, Germany, 2009. [Google Scholar]
- Cha, H.; Peng, F.Z.; Yoo, D.W. Distributed Impedance Network (Z-Network) DC-DC Converter. IEEE Trans. Power Electron. 2010, 25, 2722–2733. [Google Scholar] [CrossRef]
- Hu, X.; Gong, C. A High Gain Input-Parallel Output-Series DC/DC Converter with Dual Coupled Inductors. IEEE Trans. Power Electron. 2015, 30, 1306–1317. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, B.; Li, Z.; Qiu, D.; Yang, L.; Halang, W.A. A 3-Z-Network Boost Converter. IEEE Trans. Ind. Electron. 2015, 62, 278–288. [Google Scholar] [CrossRef]
- Shen, H.; Zhang, B.; Qiu, D.; Zhou, L. A Common Grounded Z-Source DC-DC Converter with High Voltage Gain. IEEE Trans. Ind. Electron. 2016, 63, 2925–2935. [Google Scholar] [CrossRef]
- Shen, H.; Zhang, B.; Qiu, D. Hybrid Z-Source Boost DC-DC Converters. IEEE Trans. Ind. Electron. 2017, 64, 310–319. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Q.; Li, J.; Sumner, M. A Common Ground Switched-Quasi-Z-Source Bidirectional DC-DC Converter with Wide-Voltage-Gain Range for EVs With Hybrid Energy Sources. IEEE Trans. Ind. Electron. 2018, 65, 5188–5200. [Google Scholar] [CrossRef]
- Shabestari, P.M.; Gharehpetian, G.B.; Riahy, G.H.; Mortazavian, S. Voltage controllers for DC-DC boost converters in discontinuous current mode. In Proceedings of the 2015 International Energy and Sustainability Conference (IESC), Farmingdale, NY, USA, 12–13 November 2015. [Google Scholar] [CrossRef]
- Hejri, M.; Mokhtari, H. Hybrid predictive control of a DC–DC boost converter in both continuous and discontinuous current modes of operation. Optim. Control Appl. Methods 2011, 32, 270–284. [Google Scholar] [CrossRef]
- Qian, T.; Lehman, B. An adaptive ramp compensation scheme to improve stability for DC-DC converters with ripple-based constant on-time control. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 14–18. [Google Scholar] [CrossRef]
- Liu, P.H.; Yan, Y.; Lee, F.C.; Mattavelli, P. Universal Compensation Ramp Auto-tuning Technique for Current Mode Controls of Switching Converters. IEEE Trans. Power Electron. 2018, 33, 970–974. [Google Scholar] [CrossRef]
- Chen, W.W.; Chen, J.F.; Liang, T.J.; Wei, L.C.; Ting, W.Y. Designing a Dynamic Ramp with an Invariant Inductor in Current-Mode Control for an On-Chip Buck Converter. IEEE Trans. Power Electron. 2014, 29, 750–758. [Google Scholar] [CrossRef]
- El Aroudi, A.; Mandal, K.; Giaouris, D.; Banerjee, S. Self compensation of DC-DC converters under peak current mode control. Electron. Lett. 2017, 53, 345–347. [Google Scholar] [CrossRef]
- Cheng, W.; Song, J.; Li, H.; Guo, Y. Time-Varying Compensation for Peak Current-Controlled PFC Boost Converter. IEEE Trans. Power Electron. 2015, 30, 3431–3437. [Google Scholar] [CrossRef]
- Morcillo, J.D.; Burbano, D.; Angulo, F. Adaptive ramp technique for controlling chaos and subharmonic oscillations in DC-DC power converters. IEEE Trans. Power Electron. 2016, 31, 5330–5343. [Google Scholar] [CrossRef]
- Jimenez-Triana, A.; Chen, G.; Gauthier, A. A parameter-perturbation method for chaos control to stabilizing UPOs. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 407–411. [Google Scholar] [CrossRef]
- Schöll, E.; Schuster, H.G. Handbook of Chaos Control, 2nd ed.; Wiley-VCH: Weinheim, Germany, 2008. [Google Scholar]
- Ayati, M. Chaos control of Boost converter via the fuzzy delayed-feedback method. In Proceedings of the 2016 4th International Conference on Control, Instrumentation, and Automation (ICCIA), Qazvin, Iran, 27–28 January 2016; pp. 324–328. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Units |
|---|---|---|
| Input voltage E | 10 | V |
| Switching frequency f | 10 | kHz |
| Inductance L | 1 | mH |
| Capacitance C | 10 | μF |
| Load resistance R | 20 | Ω |
| On resistance rT | 50 | mΩ |
| Parasitic resistance rC | 30 | mΩ |
| Parasitic resistance rL | 40 | mΩ |
| Reference current Iref | 0.5 to 5.5 | A |
| The Proposed Technique | Self-Compensation | Conventional Ramp Compensation | |
|---|---|---|---|
| Duty cycle d | 0.5675 | 0.5661 | 0.5527 |
| Voltage gain M | 2.3121 | 2.3047 | 2.2356 |
| Peak values of iL | 3.0033 A | 3.0016 A | 2.8170 A |
| Transition time | 3 switching cycles | 6 switching cycles | more than 20 switching cycles |
| Stable range for R | (2 to 57.4) Ω | (12.2 to 70) Ω | (2 to 20.6) Ω |
| Stable range for E | (4.95 to 20) V | (5.96 to 20) V | (10.1 to 20) V |
| Parameters | Simulation | Experiment |
|---|---|---|
| Duty cycle d | 0.5675 | 0.59 |
| Voltage gain M | 2.31 | 2.19 |
| Variation range of iL | (2.43 to 3) A | (2.394 to 3.025) A |
| Peak-peak value of inductor current iL | 0.57 A | 0.6312 A |
| Variation range of uO | (19.5 to26.3) V | (18.78 to 25.01) V |
| Peak-peak value of output voltage uO | 6.8 V | 6.228 V |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Xie, F.; Zhang, B.; Qiu, D.; Chen, X.; Li, Z.; Zhang, G. Improvement of Stability in a PCM-Controlled Boost Converter with the Target Period Orbit-Tracking Method. Electronics 2019, 8, 1432. https://doi.org/10.3390/electronics8121432
Chen Y, Xie F, Zhang B, Qiu D, Chen X, Li Z, Zhang G. Improvement of Stability in a PCM-Controlled Boost Converter with the Target Period Orbit-Tracking Method. Electronics. 2019; 8(12):1432. https://doi.org/10.3390/electronics8121432
Chicago/Turabian StyleChen, Yanfeng, Fan Xie, Bo Zhang, Dongyuan Qiu, Xi Chen, Zi Li, and Guidong Zhang. 2019. "Improvement of Stability in a PCM-Controlled Boost Converter with the Target Period Orbit-Tracking Method" Electronics 8, no. 12: 1432. https://doi.org/10.3390/electronics8121432