Application of the Lyapunov Algorithm to Optimize the Control Strategy of Low-Voltage and High-Current Synchronous DC Generator Systems



Abstract
:1. Introduction
2. Methods
2.1. Parallel Scheme of the Multiple Rectification Module
- The phase voltage and the phase current can be reduced to generate low voltage and high power.
- The harmonic loss can be reduced to improve generator efficiency.
- Each phase is driven separately to improve the fault tolerance and the reliability of the system.
- Considering the special design of the confluence plate, the ripple of the output voltage is low when the system generates the high current [16]. Therefore, the output current can be used with no filtering for the majority of applications.
2.2. Design of the Three-Phase Rectifier Controller, Based on the Lyapunov Algorithm
2.2.1. Mathematical Model of the Three-Phase Voltage Source PWM Rectifier in the d-q Synchronous Rotating Coordinate System
2.2.2. Lyapunov Control Algorithm
2.2.3. Saturation Constraint and Decoupling Control Variables
2.2.4. SVPWM Algorithm
3. Results and Discussion
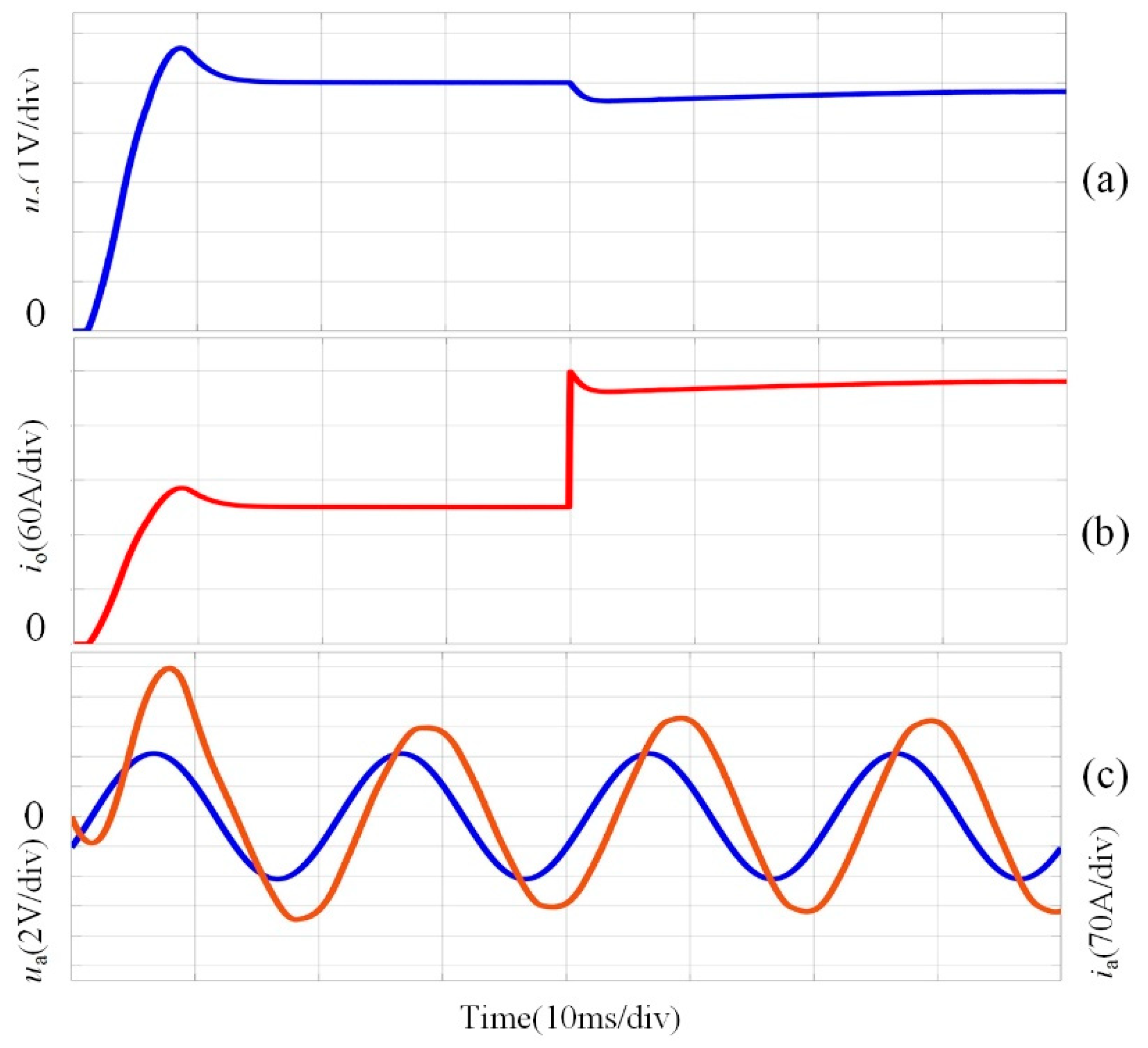
3.1. The Control Based on the Lyapunov Algorithm
3.2. The Control Based on the Direct Power Algorithm
3.3. The Control Based on the No Beat Control Algorithm
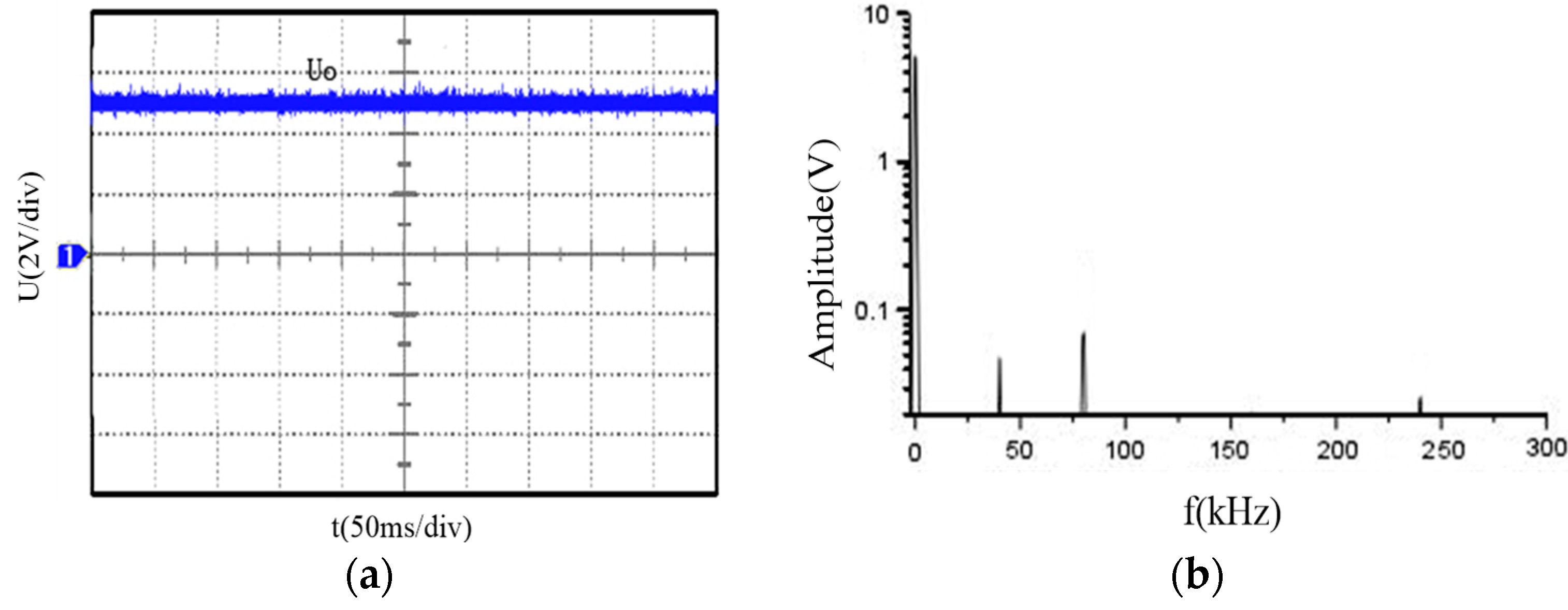
3.4. Verification of the Experimental Result
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kassakian, J.G.; Jahns, T.M. Evolving and Emerging Applications of Power Electronics in Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 47–58. [Google Scholar] [CrossRef]
- Mohseni, M.; Islam, S.M. A New Vector-Based Hysteresis Current Control Scheme for Three-Phase PWM Voltage-Source Inverters. IEEE Trans. Power Electron. 2010, 25, 2299–2309. [Google Scholar] [CrossRef]
- Du, J.; Zhao, H.; Zheng, T.Q. Study on a switching-pattern hysteresis current control method based on zero voltage vector used in three-phase PWM converter. IET Power Electron. 2017, 10, 2190–2198. [Google Scholar] [CrossRef]
- Buso, S.; Tommaso, C.G.; Danilo, I.B. Dead-Beat Current Controller for Voltage-Source Converters with Improved Large-Signal Response. IEEE Trans. Ind. Appl. 2016, 52, 1588–1596. [Google Scholar] [CrossRef]
- Cheng, C.W.; Nian, H.; Wang, X.H.; Sun, D. Dead-beat predictive direct power control of voltage source inverters with optimised switching patterns. IET Power Electron. 2017, 10, 1438–1451. [Google Scholar] [CrossRef]
- Tao, C.-W.; Wang, C.-M.; Chang, C.-W. A Design of a DC–AC Inverter Using a Modified ZVS-PWM Auxiliary Commutation Pole and a DSP-Based PID-Like Fuzzy Control. IEEE Trans. Ind. Electron. 2016, 63, 397–405. [Google Scholar] [CrossRef]
- Cecati, C.; Dell’Aquila, A.; Liserre, M.; Ometto, A. A fuzzy-logic-based controller for active rectifier. IEEE Trans. Ind. Appl. 2003, 39, 105–112. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, Z.; Yuan, L.; Lü, T.; He, F. Direct Power Control Based on Natural Switching Surface for Three-Phase PWM Rectifiers. IEEE Trans. Power Electron. 2015, 30, 2918–2922. [Google Scholar] [CrossRef]
- Bouafia, A.; Krim, F.; Gaubert, J.-P. Fuzzy-Logic-Based Switching State Selection for Direct Power Control of Three-Phase PWM Rectifier. IEEE Trans. Ind. Electron. 2009, 56, 1984–1992. [Google Scholar] [CrossRef]
- Malinowski, M.; Kaźmierkowski, M.; Hansen, S.; Blaabjerg, F.; Marques, G. Virtual-flux-based direct power control of three-phase PWM rectifiers. IEEE Trans. Ind. Appl. 2001, 37, 1019–1027. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y. Lyapunov-Based Stability and Construction of Lyapunov Functions for Boolean Networks. SIAM J. Control Optim. 2017, 55, 3437–3457. [Google Scholar] [CrossRef]
- Hasan, K.; Osman, K. Lyapunov based control for three-phase PWM AC/DC voltage source converters. IEEE Trans. Power Electron. 1998, 13, 801–813. [Google Scholar]
- Hadi, H.K.; Mahdi, B.; Ali, A.K. Direct-Lyapunov-based control scheme for voltage regulation in a three-phase islanded microgrid with renewable energy sources. Energies 2018, 11, 1161. [Google Scholar]
- Arkadiusz, L.; Zbigniew, K.; Haitham, A.R. Space-vector pulse width modulation for three-level NPC converter with the neutral point voltage control. IEEE Trans. Ind. Electron. 2011, 58, 5076–5086. [Google Scholar]
- Gu, Y.L.; Huang, G.S.; Zhang, J.F. A synchronous rectifier driving circuit for modules in parallel. Proc. CSEE 2005, 4, 25–29. [Google Scholar]
- Mohamed, A. Harmonic elimination in three-phase voltage source inverters by particle swarm optimization. JEET 2011, 6, 334–341. [Google Scholar]
- Lin, B.-R. Analysis of a DC Converter with Low Primary Current Loss and Balance Voltage and Current. Electronics 2019, 8, 439. [Google Scholar] [CrossRef]
- Song, Z.F.; Tian, Y.J.; Yan, Z.; Chen, Z. Direct Power Control for Three-Phase Two-Level Voltage-Source Rectifiers Based on Extended-State Observation. IEEE Trans. Ind. Electron. 2016, 63, 4593–4603. [Google Scholar] [CrossRef]
- Hang, L.; Liu, S.; Yan, G.; Qu, B.; Lu, Z.-Y. An Improved Deadbeat Scheme with Fuzzy Controller for the Grid-side Three-Phase PWM Boost Rectifier. IEEE Trans. Power Electron. 2011, 26, 1184–1191. [Google Scholar] [CrossRef]
- Cheng, Q.M.; Cheng, Y.M.; Xue, Y. A summary of current control methods for three-phase voltage-source PWM rectifiers. Power Syst. Prot. Control 2012, 40, 145–155. [Google Scholar]
- Qiu, X.-D.; Jung, Y.-G.; Lim, Y.-C. Three-Phase Z-Source PWM Rectifier Based on the DC Voltage Fuzzy Control. Trans. Korean Inst. Power Electron. 2013, 18, 466–476. [Google Scholar] [CrossRef] [Green Version]
- Kwak, S.; Yoo, S.-J.; Park, J. Finite control set predictive control based on Lyapunov function for three-phase voltage source inverters. IET Power Electron. 2014, 7, 2726–2732. [Google Scholar] [CrossRef]
- Abdul, M.D.; Tey, K.S.; Saad, M.; Mutsuo, N. Lyapunov law based on model predictive control scheme for grid connected three phase three level neutral point clamped inverter. In Proceedings of the 3rd International Future Energy Electronics Conference and ECCE Asia, Kaohsiung, Taiwan, 4–7 June 2017; pp. 512–516. [Google Scholar]
- Feng, Y.L.; Zhang, C.N. Core loss analysis of interior permanent magnet synchronous machines under SVPWM excitation with considering saturation. Energies 2017, 10, 1716. [Google Scholar] [CrossRef]
- Vazquez, S.; Sanchez, J.; Carrasco, J.; Leon, J.I.; Galvan, E. A Model-Based Direct Power Control for Three-Phase Power Converters. IEEE Trans. Ind. Electron. 2008, 55, 1647–1657. [Google Scholar] [CrossRef]
- Wang, J.H.; Li, H.D.; Wang, L.M. Direct power control system of three phase boost type PWM rectifiers. Proc. CSEE 2006, 26, 54–60. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | 3 | 1 | 5 | 4 | 6 | 2 |
| Sector | Ⅰ | Ⅱ | Ⅲ | Ⅳ | Ⅴ | Ⅵ |
| Sector Ⅰ | Sector Ⅱ | ||
| Sector Ⅲ | Sector Ⅳ | ||
| Sector Ⅴ | Sector Ⅵ |
| Parameter | Value |
|---|---|
| Line to line ac voltage, E | 4.2 V |
| Source voltage frequency, f | 50 Hz |
| Switching frequency | 20 kHz |
| dc-bus capacitor, C | 2200 uF |
| dc-bus voltage, vdc | 5 V |
| Sample frequency | 50 μs |
| Resistance of smoothing inductor, R | 0.56 Ω |
| Inductance of smoothing inductor, L | 1.5 mH |
| Load resistance RL | 32 Ω |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Tan, X.; Wang, X.; Ho-Ching IU, H. Application of the Lyapunov Algorithm to Optimize the Control Strategy of Low-Voltage and High-Current Synchronous DC Generator Systems. Electronics 2019, 8, 871. https://doi.org/10.3390/electronics8080871
Liu J, Tan X, Wang X, Ho-Ching IU H. Application of the Lyapunov Algorithm to Optimize the Control Strategy of Low-Voltage and High-Current Synchronous DC Generator Systems. Electronics. 2019; 8(8):871. https://doi.org/10.3390/electronics8080871
Chicago/Turabian StyleLiu, Jinfeng, Xiaohai Tan, Xudong Wang, and Herbert Ho-Ching IU. 2019. "Application of the Lyapunov Algorithm to Optimize the Control Strategy of Low-Voltage and High-Current Synchronous DC Generator Systems" Electronics 8, no. 8: 871. https://doi.org/10.3390/electronics8080871