
Early Flood Monitoring and Forecasting System Using a Hybrid Machine Learning-Based Approach


Abstract
:1. Introduction
2. Materials and Methods
2.1. Description and Monitoring of the Study Area
2.2. Data Acquisition and Preprocessing
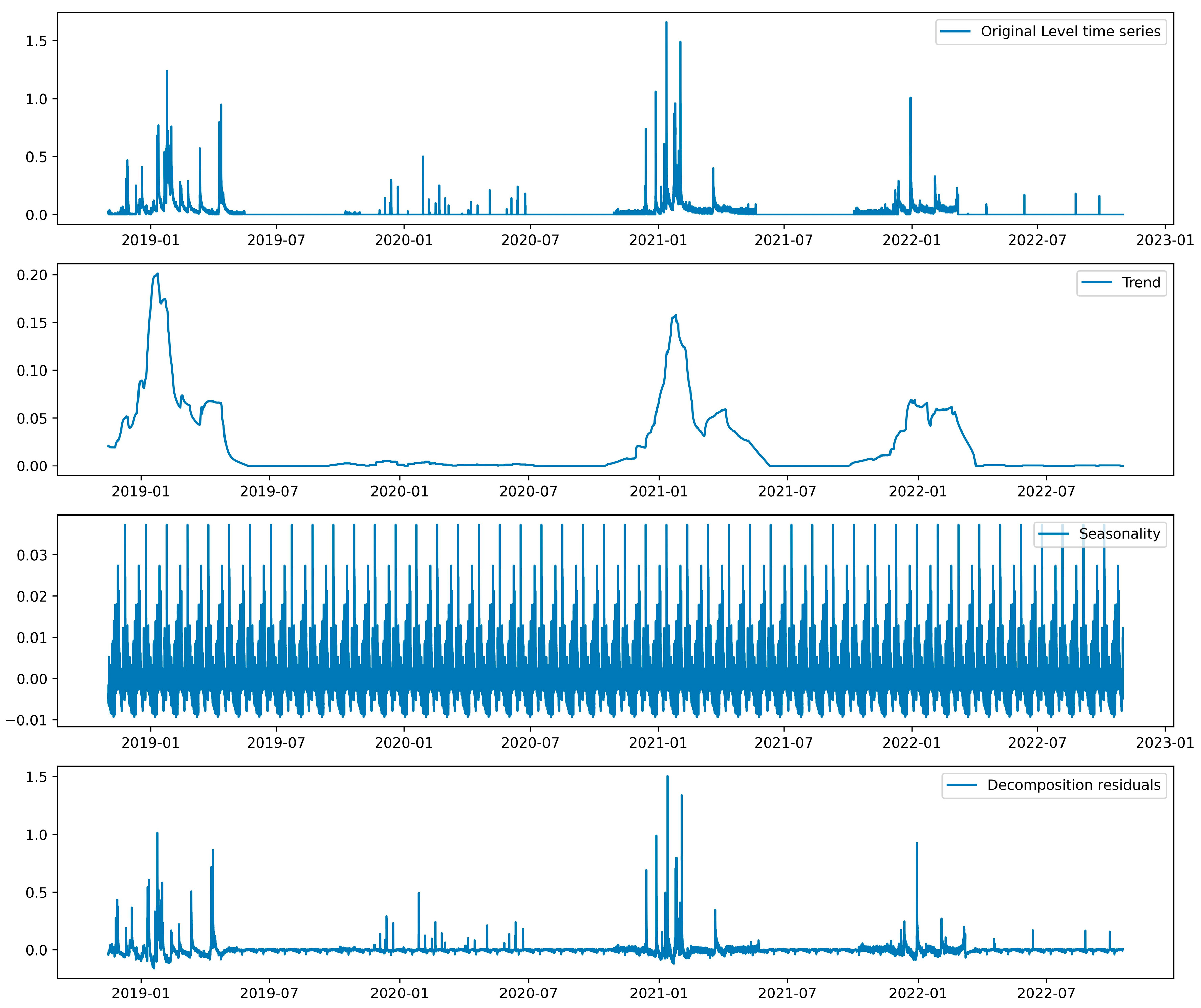
2.2.1. Trend and Seasonality of Level Target Dataset
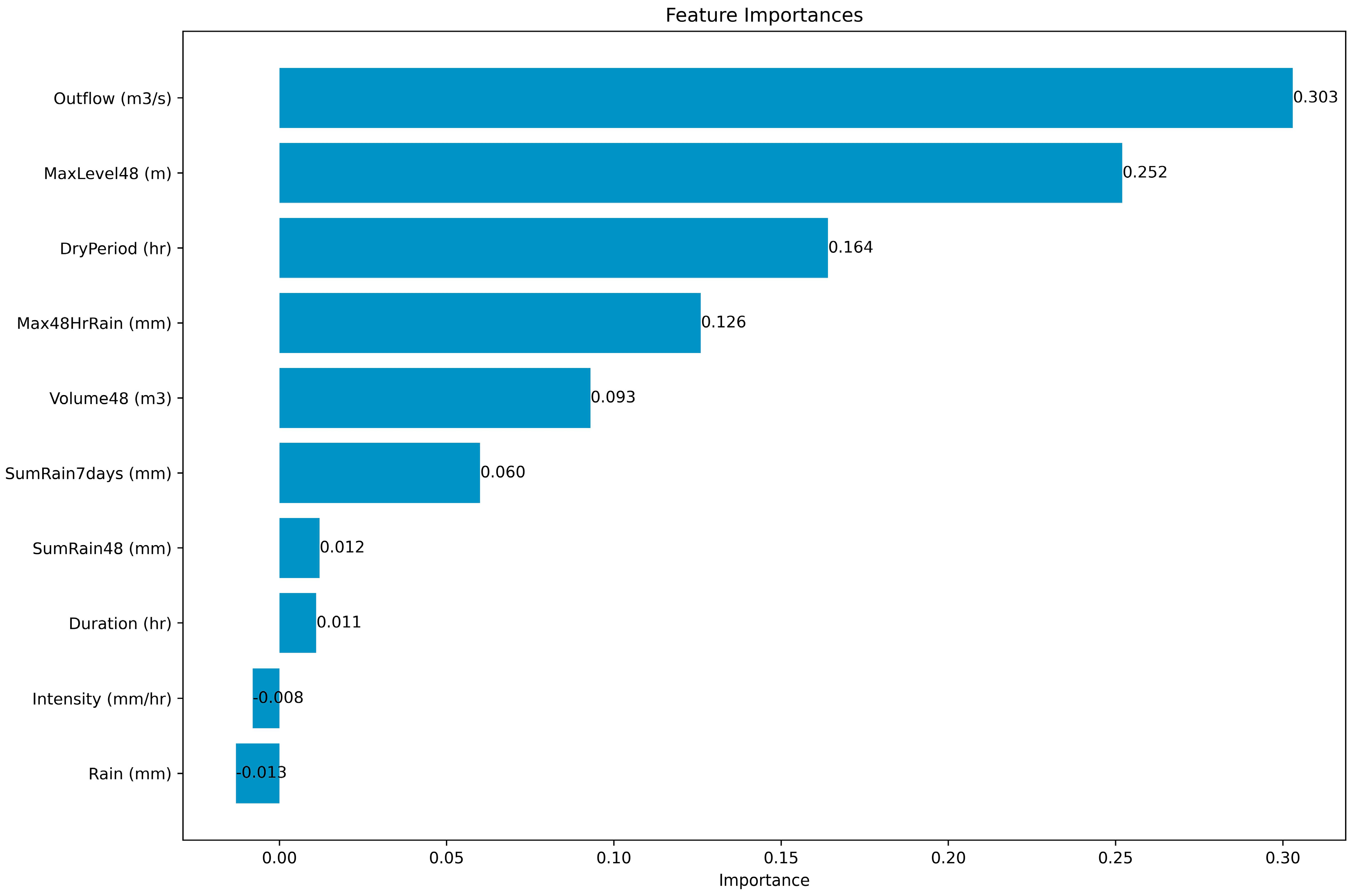
2.2.2. Permutation Feature Importance
2.3. Physical Model: HEC-HMS
2.4. Data-Driven Model: Long Short-Term Memory
2.4.1. Structure of LSTM Architectures
2.4.2. Implementation and Settings of LSTM Models
2.5. Model Evaluation Criteria
3. Results
3.1. Hydrological Analysis Based on the Physical Model HEC-HMS
3.2. Feature Importance Investigation
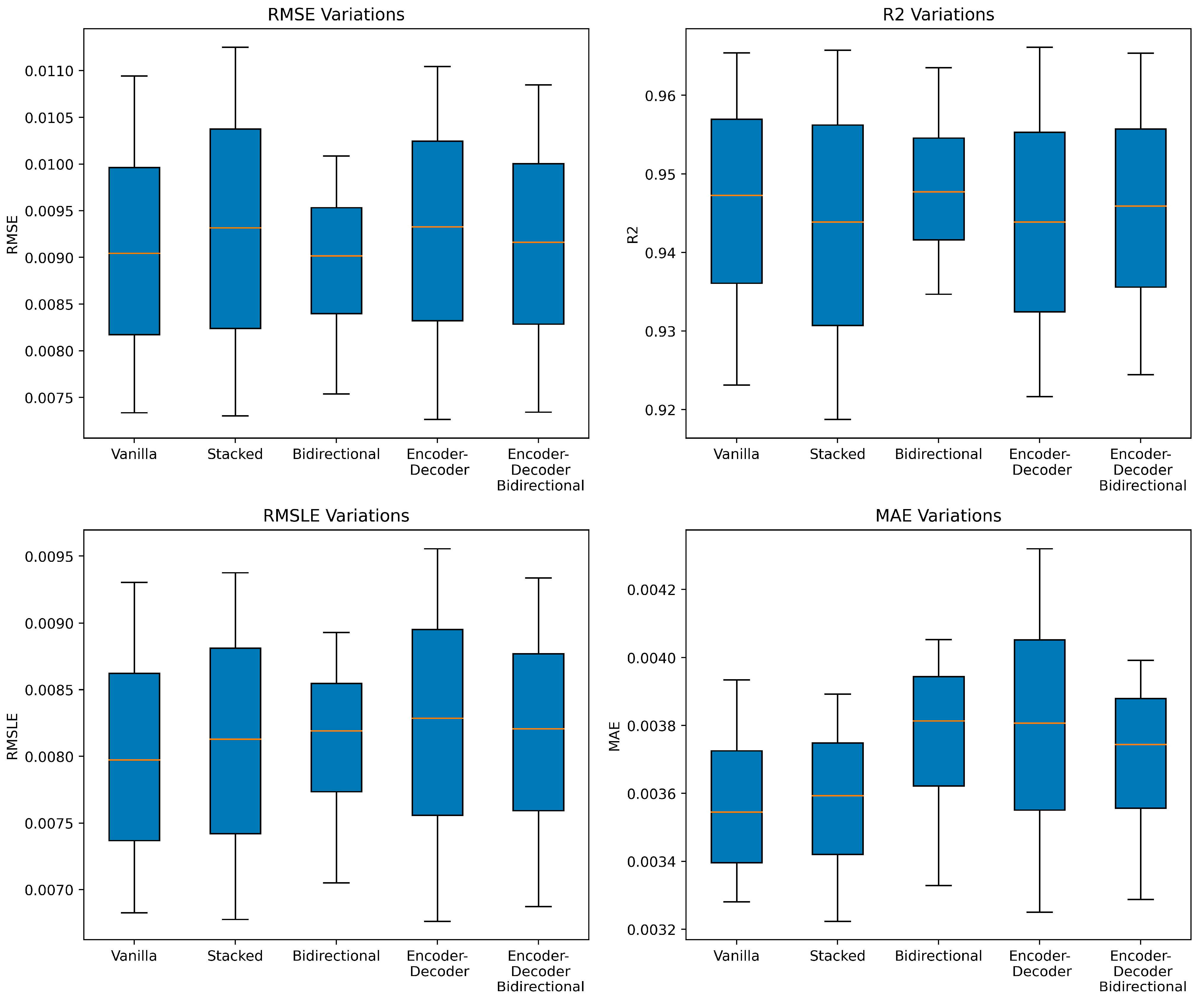
3.3. LSTM Architecture Performance Using Evaluation Metrics
3.4. Level Multi-Step Predictions
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, J.H.; Yuk, G.M.; Moon, H.T.; Moon, Y.-I. Integrated Flood Forecasting and Warning System against Flash Rainfall in the Small-Scaled Urban Stream. Atmosphere 2020, 11, 971. [Google Scholar] [CrossRef]
- Tzoraki, O. Operating Small Hydropower Plants in Greece under Intermittent Flow Uncertainty: The Case of Tsiknias River (Lesvos). Challenges 2020, 11, 17. [Google Scholar] [CrossRef]
- Koutsovili, E.I.; Tzoraki, O.; Theodossiou, N.; Gaganis, P. Numerical assessment of climate change impact on the hydrological regime of a small Mediterranean river, Lesvos Island, Greece. Acta Hortic. Regiotect. 2021, 24, 28–48. [Google Scholar] [CrossRef]
- Oikonomou, V.; Dimitrakopoulos, P.G.; Troumbis, A.Y. Incorporating Ecosystem Function Concept in Environmental Planning and Decision Making by Means of Multi-Criteria Evaluation: The Case-Study of Kalloni, Lesvos, Greece. Environ. Manag. 2011, 47, 77–92. [Google Scholar] [CrossRef]
- Matrai, I.; Tzoraki, O. Assessing stakeholder perceptions regarding floods in Kalloni and Agia Paraskevi, Lesvos Greece. In Proceedings of the 3rd International Congress on Applied Ichthyology & Aquatic Environment, Volos, Greece, 8–11 November 2018; pp. 818–820. [Google Scholar]
- Skouloudis, A.; Filho, W.L.; Vouros, P.; Evangelinos, K.; Nikolaou, I.E.; Deligiannakis, G.; Tsalis, T.A. Assessing Greek Small and Medium-sized Enterprises’ Flood Resilience Capacity: Index Development and Application. J. Flood Risk Manag. 2022, 16, e12858. [Google Scholar] [CrossRef]
- Special Secretariat for Water. Flood Risk Management Plan of the River Basins of the Water Division of the Aegean Islands (North and South Aegean), Stage I, Phase 1, Analysis of Area Characteristics and Flood Mechanisms Technical Report; Latest Revision 2018; Ministry of Environment & Energy: Hellenic Republic, Greece, 2015. [Google Scholar]
- Koutsovili, E.I.; Tzoraki, O.; Kalli, A.A.; Provatas, S.; Gaganis, P. Participatory approaches for planning Nature-Based Sοlutions in flood vulnerable landscapes. Environ. Sci. Policy 2023, 140, 12–23. [Google Scholar] [CrossRef]
- Chen, C.; Jiang, J.; Liao, Z.; Zhou, Y.; Wang, H.; Pei, Q. A short-term flood prediction based on spatial deep learning network: A case study for Xi County, China. J. Hydrol. 2022, 607, 127535. [Google Scholar] [CrossRef]
- Sahoo, B.B.; Jha, R.; Singh, A.; Kumar, D. Long Short-Term Memory (LSTM) Recurrent Neural Network for Low-Flow Hydrological Time Series Forecasting. Acta Geophys. 2019, 67, 1471–1481. [Google Scholar] [CrossRef]
- Sudriani, Y.; Ridwansyah, I.; Rustini, H.A. Long Short Term Memory (LSTM) Recurrent Neural Network (RNN) for Discharge Level Prediction and Forecast in Cimandiri River, Indonesia. IOP Conf. Ser. 2019, 299, 012037. [Google Scholar] [CrossRef]
- Won, Y.-M.; Lee, J.P.; Moon, H.; Moon, Y.-I. Development and Application of an Urban Flood Forecasting and Warning Process to Reduce Urban Flood Damage: A Case Study of Dorim River Basin, Seoul. Water 2022, 14, 187. [Google Scholar] [CrossRef]
- Chen, C.; Jiang, J.; Zhou, Y.; Lv, N.; Liang, X.; Wan, S. An Edge Intelligence Empowered Flooding Process Prediction Using Internet of Things in Smart City. J. Parallel Distrib. Comput. 2022, 165, 66–78. [Google Scholar] [CrossRef]
- Gohar, T.; Hasan, L.; Khan, G.M.; Mubashir, M. Constraint Free Early Warning System for Flood Using Multivariate LSTM Network. In Proceedings of the 2022 2nd International Conference on Artificial Intelligence (ICAI), Islamabad, Pakistan, 30–31 March 2022; pp. 64–70. [Google Scholar] [CrossRef]
- Hu, J.-Y.; Lennox, B.; Arvin, F. Robust Formation Control for Networked Robotic Systems Using Negative Imaginary Dynamics. Automatica 2022, 140, 110235. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y.; Li, S.; Cao, Q. Hierarchical Matching With Peer Effect for Low-Latency and High-Reliable Caching in Social IoT. IEEE Int. Things J. 2019, 6, 1193–1209. [Google Scholar] [CrossRef]
- Xu, Y.; Hu, C.; Wu, Q.; Jian, S.; Li, Z.; Chen, Y.; Zhang, G.; Zhang, Z.; Wang, S. Research on particle swarm optimization in LSTM neural networks for rainfall-runoff simulation. J. Hydrol. 2022, 608, 127553. [Google Scholar] [CrossRef]
- Le, X.-H.; Ho, H.V.; Lee, G.; Jung, S. Application of long short-term memory (LSTM) neural network for flood forecasting. Water 2019, 11, 1387. [Google Scholar] [CrossRef]
- Kim, T.; Yang, T.; Gao, S.; Zhang, L.; Ding, Z.; Wen, X.; Gourley, J.J.; Hong, Y. Can artificial intelligence and data-driven machine learning models match or even replace process-driven hydrologic models for streamflow simulation? A case study of four watersheds with different hydro-climatic regions across the CONUS. J. Hydrol. 2021, 598, 126423. [Google Scholar] [CrossRef]
- Ren, D.-F.; Cao, A.-H. Precipitation–runoff simulation in Xiushui river basin using HEC–HMS hydrological model. Model. Earth Syst. Environ. 2023, 9, 2845–2856. [Google Scholar] [CrossRef]
- Kastali, A.; Zeroual, A.; Zeroual, S.; Hamitouche, Y. Auto-Calibration of HEC-HMS Model for Historic Flood Event under Rating Curve Uncertainty. Case Study: Allala Watershed, Algeria. KSCE J. Civ. Eng. 2022, 26, 482–493. [Google Scholar] [CrossRef]
- Nadeem, M.; Waheed, Z.; Ghaffar, A.; Javaid, M.; Hamza, A.; Ayub, Z.; Nawaz, M.; Waseem, W.; Hameed, M.F.; Zeeshan, A.; et al. Application of HEC-HMS for Flood Forecasting in Hazara Catchment Pakistan, South Asia. Int. J. Hydrol. 2022, 6, 7–12. [Google Scholar] [CrossRef]
- Wijayarathne, D.; Coulibaly, P. Identification of Hydrological Models for Operational Flood Forecasting in St. John’s, Newfoundland, Canada. J. Hydrol. Reg. Stud. 2020, 27, 100646. [Google Scholar] [CrossRef]
- Islam, Z. A Review on Physically Based Hydrologic Modeling; University of Alberta: Edmonton, AB, Canada, 2011. [Google Scholar]
- Wang, C.; Chen, C.; Pei, Q.; Jiang, Z.; Xu, S. An Information-Centric In-Network Caching Scheme for 5G-Enabled Internet of Connected Vehicles. IEEE Trans. Mob. Comput. 2023, 22, 3137–3150. [Google Scholar] [CrossRef]
- Qin, J.; Liang, J.; Chen, T.; Lei, X.; Kang, A. Simulating and Predicting of Hydrological Time Series Based on TensorFlow Deep Learning. Pol. J. Environ. Stud. 2018, 28, 795–802. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Xu, Y.-P.; Yang, Z.; Wang, G.; Zhu, Q. Integration of a Parsimonious Hydrological Model with Recurrent Neural Networks for Improved Streamflow Forecasting. Water 2018, 10, 1655. [Google Scholar] [CrossRef]
- Ahmad, M.; Mehedi, M.A.A.; Yazdan, M.M.S.; Kumar, R. Development of Machine Learning Flood Model Using Artificial Neural Network (ANN) at Var River. Liquids 2022, 2, 147–160. [Google Scholar] [CrossRef]
- Jain, S.K.; Hapuarachchi, H.A.; Mani, P.; Jain, S.K.; Prakash, P.; Singh, V.P.; Tullos, D.; Dimri, A.P. A Brief Review of Flood Forecasting Techniques and Their Applications. Int. J. River Basin Manag. 2018, 16, 329–344. [Google Scholar] [CrossRef]
- Miao, Q.; Pan, B.; Wang, H.; Hsu, K.; Sorooshian, S. Improving Monsoon Precipitation Prediction Using Combined Convolutional and Long Short Term Memory Neural Network. Water 2019, 11, 977. [Google Scholar] [CrossRef]
- Yunpeng, L.; Di, H.; Junpeng, B.; Yong, Q. Multi-Step Ahead Time Series Forecasting for Different Data Patterns Based on LSTM Recurrent Neural Network. In Proceedings of the 14th Web Information Systems and Applications Conference (WISA), Liuzhou, China, 11–14 November 2017; pp. 305–310. [Google Scholar] [CrossRef]
- Fofana, M.; Adounkpe, J.; Dotse, S.-Q.; Bokar, H.; Limantol, A.M.; Hounkpe, J.; Larbi, I.; Toure, A. Flood Forecasting and Warning System: A Survey of Models and Their Applications in West Africa. Am. J. Clim. Chang. 2023, 12, 1–20. [Google Scholar] [CrossRef]
- Agudelo-Otalora, L.M.; Moscoso-Barrera, W.D.; Paipa-Galeano, L.A.; Mesa-Sciarrotta, C. Comparison of Physical Models and Artificial Intelligence for Prediction of Flood Levels. Tecnol. Cienc. Agua 2018, 9, 209–235. [Google Scholar] [CrossRef]
- Kratzert, F.; Klotz, D.; Shalev, G.; Klambauer, G.; Hochreiter, S.; Nearing, G. Towards Learning Universal, Regional, and Local Hydrological Behaviors via Machine Learning Applied to Large-Sample Datasets. Hydrol. Earth Syst. Sci. 2019, 23, 5089–5110. [Google Scholar] [CrossRef]
- Kim, T.; Shin, J.-Y.; Kim, H.; Heo, J.-H. Ensemble-Based Neural Network Modeling for Hydrologic Forecasts: Addressing Uncertainty in the Model Structure and Input Variable Selection. Water Resour. Res. 2020, 56, e2019WR026262. [Google Scholar] [CrossRef]
- Hellenic Statistical Authority. Demographic Characteristics/2021 (XLS). 2021. Available online: www.statistics.gr (accessed on 17 July 2023).
- Filippou, K.; Aifantis, G.; Papakostas, G.A.; Tsekouras, G.E. Structure learning and hyperparameter optimization using an automated machine learning (AutoML) pipeline. Information 2023, 14, 232. [Google Scholar] [CrossRef]
- Cai, B.; Yu, Y. Flood forecasting in urban reservoir using hybrid recurrent neural network. Urban Clim. 2022, 42, 101086. [Google Scholar] [CrossRef]
- Filipova, V.; Hammond, A.; Leedal, D.; Lamb, R. Prediction of Flood Quantiles at Ungauged Catchments for the Contiguous USA Using Artificial Neural Networks. Hydrol. Res. 2022, 53, 107–123. [Google Scholar] [CrossRef]
- Jamei, M.; Ali, M.; Malik, A.; Prasad, R.; Abdulla, S.; Yaseen, Z.M. Forecasting Daily Flood Water Level Using Hybrid Advanced Machine Learning Based Time-Varying Filtered Empirical Mode Decomposition Approach. Water Resour. Manag. 2022, 36, 4637–4676. [Google Scholar] [CrossRef]
- Jiang, S.; Zheng, Y.; Wang, C.; Babovic, V. Uncovering flooding mechanisms across the contiguous United States through interpretive deep learning on representative catchments. Water Resour. Res. 2022, 58, e2021WR030185. [Google Scholar] [CrossRef]
- Liu, B.; Tang, Q.; Zhao, G.; Gao, L.; Shen, C.; Pan, B. Physics-Guided Long Short-Term Memory Network for Streamflow and Flood Simulations in the Lancang–Mekong River Basin. Water 2022, 14, 1429. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gürsoy, M.İ.; Alkan, A. Investigation Of Diabetes Data with Permutation Feature Importance Based Deep Learning Methods. Karadeniz Fen Bilim. Derg. 2022, 12, 916–930. [Google Scholar] [CrossRef]
- Li, D.; Metternicht, G.; Liang, Z.; Sharma, A. Hydrologic Multi-Model Ensemble Predictions Using Variational Bayesian Deep Learning. J. Hydrol. 2022, 604, 127221. [Google Scholar] [CrossRef]
- Ramos-Valle, A.N.; Curchitser, E.N.; Bruyère, C.L.; McOwen, S. Implementation of an Artificial Neural Network for Storm Surge Forecasting. J. Geophys. Res. Atmos. 2021, 126, e2020JD033266. [Google Scholar] [CrossRef]
- Mohammadifar, A.; Gholami, H.; Golzari, S. Assessment of the uncertainty and interpretability of deep learning models for mapping soil salinity using DeepQuantreg and game theory. Sci. Rep. 2022, 12, 15167. [Google Scholar] [CrossRef] [PubMed]
- McGovern, A.; Lagerquist, R.; Gagne, D.J.; Jergensen, G.E.; Elmore, K.L.; Homeyer, C.R.; Smith, T.A. Making the Black Box More Transparent: Understanding the Physical Implications of Machine Learning. Bull. Am. Meteorol. Soc. 2019, 100, 2175–2199. [Google Scholar] [CrossRef]
- Janicka, E.; Kanclerz, J. Assessing the Effects of Urbanization on Water Flow and Flood Events Using the HEC-HMS Model in the Wirynka River Catchment, Poland. Water 2023, 15, 86. [Google Scholar] [CrossRef]
- Lianqing, X.; Fan, Y.; Changbing, Y.; Guanghui, W.; Wenqian, L.; Xinlin, H. Hydrological simulation and uncertainty analysis using the improved TOPMODEL in the arid Manas River basin, China. Sci. Rep. 2018, 8, 452. [Google Scholar] [CrossRef]
- Tassew, B.G.; Belete, M.A.; Miegel, K. Application of HEC-HMS model for flow simulation in the Lake Tana Basin: The case of Gilgel Abay catchment Upper Blue Nile Basin Ethiopia. Hydrology 2019, 6, 21. [Google Scholar] [CrossRef]
- Kotti, M.L.; Hermassi, T. Regional-scale flood modeling using GIS and HEC-HMS / RAS: A case study for the upper -valley of the Medjerda (Tunisia). J. New Sci. Agric. Biotechnol. 2022, 89, 5060–5067. [Google Scholar]
- Mahapatra, A.; Mahammood, V.; Venkatesh, K. Unsteady flow analysis using hydrological and hydraulic models for real-time flood forecasting in the Vamsadhara river basin. J. Hydroinform. 2022, 24, 1207–1233. [Google Scholar] [CrossRef]
- Fanta, S.S.; Feyissa, T.A. Performance evaluation of HEC-HMS model for continuous runoff simulation of Gilgel Gibe watershed, Southwest Ethiopia. J. Water Land Dev. 2021, 50, 85–97. [Google Scholar] [CrossRef]
- Cuomo, A.; Guida, D. Hydro-Geomorphologic-Based Water Budget at Event Time-Scale in A Mediterranean Headwater Catchment (Southern Italy). Hydrology 2021, 8, 20. [Google Scholar] [CrossRef]
- Jayadeera, P.M.; Wijesekera, N.T.S. A Diagnostic Application of HEC– HMS Model to Evaluate the Potential for Water Management in the Ratnapura Watershed of Kalu Ganga Sri Lanka. Eng. J. Inst. Eng. 2019, 52, 11–21. [Google Scholar] [CrossRef]
- Herath, M.H.B.C.W.; Wijesekera, N.T.S. Evaluation of HEC-HMS Model for Water Resources Management in Maha Oya Basin in Sri Lanka. Eng. J. Inst. Eng. 2021, 54, 45. [Google Scholar] [CrossRef]
- Chathuranika, I.M.; Gunathilake, M.B.; Baddewela, P.K.; Sachinthanie, E.; Babel, M.S.; Shrestha, S.; Jha, M.K.; Rathnayake, U.S. Comparison of Two Hydrological Models, HEC-HMS and SWAT in Runoff Estimation: Application to Huai Bang Sai Tropical Watershed, Thailand. Fluids 2022, 7, 267. [Google Scholar] [CrossRef]
- US Army Corps of Engineers. Hydrologic Modeling System User’s Manual 2008; Hydrologic Engineering Center: Davis, CA, USA, 2008. [Google Scholar]
- US Army Corps of Engineers. Hydrologic Modeling System HEC-HMS, User’s Manual; Version 4.3; US Army Corps of Engineers Hydrologic Engineering Center: Davis, CA, USA, 2018. [Google Scholar]
- Scharffenberg, B.; Bartles, M.; Brauer, T.; Fleming, M.; Karlovits, G. Hydrologic Modeling System User’ s Manual 2018. In U.S. Army Crops of Engineers; Hydrologic Engineering Center: Davis, CA, USA, 2018. [Google Scholar]
- USDA-SCS. Urban Hydrology for Small Watersheds. In Technical Release No. 55 (TR-55); United States Department of Agriculture: Washington, DC, USA, 1986. Available online: https://www.nrcs.usda.gov/Internet/FSE_DOCUMENTS/stelprdb1044171.pdf (accessed on 17 July 2023).
- George, R.; Joseph, A. Application of Hydrologic Engineering Centers Hydrologic Modeling System (HEC-HMS) Model for Modelling Flood in Sub Basin of Meenachil River, Kerala, India. Int. J. Environ. Clim. Chang. 2022, 12, 1251–1262. [Google Scholar] [CrossRef]
- World Bank. Annex One: Development of the Hydrologic Model for the Sava River Basin; World Bank Group: Washington, DC, USA, 2015. [Google Scholar]
- Atashi, V.; Gorji, H.T.; Shahabi, S.M.; Kardan, R.; Lim, Y.H. Water Level Forecasting Using Deep Learning Time-Series Analysis: A Case Study of Red River of the North. Water 2022, 14, 1971. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K.-W. Flood Prediction Using Machine Learning Models: Literature Review. Water 2018, 10, 1536. [Google Scholar] [CrossRef]
- Barrera-Animas, A.Y.; Oyedele, L.O.; Bilal, M.; Akinosho, T.D.; Delgado, J.M.D.; Akanbi, L.A. Rainfall prediction: A comparative analysis of modern machine learning algorithms for time-series forecasting. Mach. Learn. Appl. 2022, 7, 100204. [Google Scholar] [CrossRef]
- Cao, Q.; Zhang, H.; Zhu, F.; Hao, Z.; Yuan, F. Multi-step-ahead flood forecasting using an improved BiLSTM-S2S model. J. Flood Risk Manag. 2022, 15, e12827. [Google Scholar] [CrossRef]
- Pavlyshenko, B.M. Machine-Learning Models for Sales Time Series Forecasting. Data 2019, 4, 15. [Google Scholar] [CrossRef]
- Elman, J.L. Finding structure in time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]
- Ni, L.; Tang, B.Z.; Singh, V.P.; Wu, J.; Singh, V.P.; Tao, Y.; Zhang, J. Streamflow and Rainfall Forecasting by Two Long Short-Term Memory-Based Models. J. Hydrol. 2020, 583, 124296. [Google Scholar] [CrossRef]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A search space odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2222–2232. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Chen, X.; Yu, R.; Ullah, S.; Wu, D.; Li, Z.; Li, Q.; Qi, H.; Liu, J.; Liu, M.; Zhang, Y. A novel loss function of deep learning in wind speed forecasting. Energy 2022, 238, 121808. [Google Scholar] [CrossRef]
- Nguyen, L.V.; Tornyeviadzi, H.M.; Bui, D.T.; Seidu, R. Predicting Discharges in Sewer Pipes Using an Integrated Long Short-Term Memory and Entropy A-TOPSIS Modeling Framework. Water 2022, 14, 300. [Google Scholar] [CrossRef]
- Yu, Y.; Si, X.; Hu, C.; Zhang, J. A Review of Recurrent Neural Networks: LSTM Cells and Network Architectures. Neural Comput. 2019, 31, 1235–1270. [Google Scholar] [CrossRef]
- Man, Y.; Yang, Q.; Shao, J.; Wang, G.; Bai, L.; Xue, Y. Enhanced LSTM Model for Daily Runoff Prediction in the Upper Huai River Basin, China. Engineering 2023, 24, 229–238. [Google Scholar] [CrossRef]
- Abidogun, O.A. Data Mining, Fraud Detection and Mobile Telecommunications: Call Pattern Analysis with Unsupervised Neural Networks. Master’s Thesis, University of the Western Cape, Cape Town, South Africa, 2005. Available online: http://hdl.handle.net/11394/2497 (accessed on 17 July 2023).
- Kratzert, F.; Klotz, D.; Brenner, C.; Schulz, K.; Herrnegger, M. Rainfall–runoff modelling using long short-term memory (LSTM) networks. Hydrol. Earth Syst. Sci. 2018, 22, 6005–6022. [Google Scholar] [CrossRef]
- Biniyaz, A.; Azmoon, B.; Sun, Y.; Liu, Z. Long Short-Term Memory Based Subsurface Drainage Control for Rainfall-Induced Landslide Prevention. Geosciences 2022, 12, 64. [Google Scholar] [CrossRef]
- Sahar, A.; Han, D. An LSTM-based Indoor Positioning Method Using Wi-Fi Signals. In Proceedings of the 2nd International Conference on Vision, Image and Signal Processing (ICVISP 2018), Las Vegas, NV, USA, 27–29 August 2018; Association for Computing Machinery: New York, NY, USA, 2018. Article 43. pp. 1–5. [Google Scholar] [CrossRef]
- Cui, Z.; Ke, R.; Pu, Z.; Wang, Y. Deep Bidirectional and Unidirectional LSTM Recurrent Neural Network for Network-wide Traffic Speed Prediction. arXiv 2018, arXiv:abs/1801.02143. [Google Scholar] [CrossRef]
- Sutskever, I.; Vinyals, O.; Le, Q.V. Sequence to sequence learning with neural networks. Advances in Neural Information Processing Systems. In Proceedings of the 27th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; MIT Press: Cambridge, MA, USA, 2014; Volume 2, pp. 3104–3112. [Google Scholar] [CrossRef]
- Kao, I.-F.; Zhou, Y.; Chang, L.-C.; Changa, F.-J. Exploring a Long Short-Term Memory based Encoder-Decoder framework for multi-step ahead flood forecasting. J. Hydrol. 2020, 583, 124631. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M. Tensorflow: Large-scale machine learning on heterogeneous distributed systems. arXiv 2016, arXiv:1603.04467 2016. [Google Scholar]
- Zhang, D.; Lindholm, G.; Ratnaweera, H. Use long short-term memory to enhance Internet of Things for combined sewer overflow monitoring. J. Hydrol. 2018, 556, 409–418. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models. Part 1: A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Moriasi, D.N.; Arnold, J.R.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model Evaluation Guidelines for Systematic Quantification of Accuracy in Watershed Simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Madaeni, F.; Chokmani, K.; Lhissou, R.; Homayouni, S.; Gauthier, Y.; Tolszczuk-Leclerc, S. Convolutional Neural Network and Long Short-Term Memory Models for Ice-Jam Predictions. Cryosphere 2022, 16, 1447–1468. [Google Scholar] [CrossRef]
- Zhang, Y.; Gu, Z.; Thé, J.V.G.; Yang, S.X.; Gharabaghi, B. The Discharge Forecasting of Multiple Monitoring Station for Humber River by Hybrid LSTM Models. Water 2022, 14, 1794. [Google Scholar] [CrossRef]
- Ibrahim, A.A.; Halboosh, A.K.J. Flood Forecasting Using Neural Network: Applying The Lstm Network In The Mosul Region. Iraq. Int. J. Multidiscip. Stud. Innov. Technol. 2022, 6, 113–116. [Google Scholar] [CrossRef]
- Kilsdonk, R.A.H.; Bomers, A.; Wijnberg, K.M. Predicting Urban Flooding Due to Extreme Precipitation Using a Long Short-Term Memory Neural Network. Hydrology 2022, 9, 105. [Google Scholar] [CrossRef]
- Noor, F.; Haq, S.; Rakib, M.; Ahmed, T.; Jamal, Z.; Siam, Z.S.; Hasan, R.T.; Adnan, M.S.G.; Dewan, A.; Rahman, R.M. Water Level Forecasting Using Spatiotemporal Attention-Based Long Short-Term Memory Network. Water 2022, 14, 612. [Google Scholar] [CrossRef]
- Rauf, A.-u.; Ghumman, A.R. Impact Assessment of Rainfall-Runoff Simulations on the Flow Duration Curve of the Upper Indus River—A Comparison of Data-Driven and Hydrologic Models. Water 2018, 10, 876. [Google Scholar] [CrossRef]
- Hu, C.; Wu, Q.; Li, H.; Jian, S.; Li, N.; Lou, Z. Deep Learning with a Long Short-Term Memory Networks Approach for Rainfall-Runoff Simulation. Water 2018, 10, 1543. [Google Scholar] [CrossRef]
- Abbas, A.; Baek, S.; Kim, M.; Ligaray, M.; Ribolzi, O.; Silvera, N.; Min, J.H.; Boithias, L.; Cho, K.H. Surface and sub-surface flow estimation at high temporal resolution using deep neural networks. J. Hydrol. 2020, 590, 125370. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Application | Resolution | Source |
|---|---|---|---|
| Water Level | Rating curve construction, HEC-HMS calibration and validation | 15 min | ERMIS-floods platform https://ews.ermis-f.eu/ * |
| Stream flow | Rating curve construction, HEC-HMS calibration, and validation | 20 s | Field measurements |
| Precipitation, Temperature | Input data for hydrological simulation | 10 min | AEGIS-fire laboratory, University of the Aegean http://virtualfire.aegean.gr/ * |
| Digital Elevation Model (Dem) | HEC-GeoHMS terrain preprocessing | 5 m | Hellenic Cadastre http://gis.ktimanet.gr/ * |
| Land use | Parameters calculation for hydrological model | 1:10,000 | Northern Aegean Water Directorate http://www.apdaigaiou.gov.gr/ * |
| Soil | Parameters calculation for hydrological model | 1:1,000,000 | European Soil Data Centre (ESDAC) https://esdac.jrc.ec.europa.eu/ * |
| Feature | Description | Units |
|---|---|---|
| Level | Target value: Level for each 15-min step | Meters (m) |
| MaxLevel48 | Maximum level of the previous 48 h | Meters (m) |
| Rain | Cumulative rainfall for each 15-min step | Millimeters (mm) |
| SumRain48 | Cumulative rainfall of the previous 48 h | Millimeters (mm) |
| Max48HrRain | Maximum hourly rainfall of the previous 48 h | Millimeters (mm) |
| SumRain7days | Cumulative rainfall of the previous 7 days | Millimeters (mm) |
| Intensity | Rain intensity | Millimeters/hour (mm/h) |
| Duration * | Rainfall duration up to the considered time | Hours (h) |
| DryPeriod | Dry period: cumulative hours of aridity | Hours (h) |
| Outflow | Discharge | Cubic meters/s (m3/s) |
| Volume48 | Discharge volume of the previous 48 h | Cubic meters (m3) |
| Component | Method | Parameter | Unit |
|---|---|---|---|
| Canopy | Simple Canopy | Initial Storage | % |
| Max Storage | mm | ||
| Crop Coefficient | - | ||
| Surface | Simple Surface | Initial Storage | % |
| Max Storage | mm | ||
| Loss | Deficit and Constant | Initial Deficit | mm |
| Maximum Deficit | mm | ||
| Constant Rate | mm/h | ||
| Impervious | % | ||
| Transform | Clark Unit Hydrograph | Time of concentration | h |
| Storage Coefficient | h | ||
| Baseflow | Linear Reservoir | GW 1 Initial | m3/s |
| GW 1 Fraction | - | ||
| GW 1 Coefficient | h | ||
| GW 2 Initial | m3/s | ||
| GW 2 Fraction | - | ||
| GW 2 Coefficient | h | ||
| Routing | Lag | Lag Time | min |
| Evapotranspiration | Constant Monthly | Monthly Evaporation Rate | mm/month |
| Crop Coefficient | - |
| Name | Vanilla LSTM | Stacked LSTM | Bidirectional LSTM | Encoder–Decoder LSTM | Encoder–Decoder Bidirectional LSTM |
|---|---|---|---|---|---|
| Model | Sequential | Sequential | Sequential | Encoder-Decoder | Encoder-Decoder |
| LSTM hidden layers | 1 | 2 | 1 | 1 Encoder 1 Decoder | 1 Encoder 1 Decoder |
| LSTM units/memory cells | 48 | 1st 48 2nd 64 | 96 | Encoder 40 Decoder 40 | Encoder 200 Decoder 400 |
| LSTM activation function | tanh | tanh | tanh | tanh | tanh |
| Dense layers | 1 | 1 | 1 | 1 | 1 |
| Dense units/memory cells | 4 | 4 | 4 | 4 | 4 |
| Dense activation function | Linear | Linear | Linear | Linear | Linear |
| Optimizer | Adam | Adam | Adam | Adam | Adam |
| Learning rate | 0.001 | 0.001 | 0.001 | 0.001 | 0.001 |
| Loss function | MSE | MSE | MSE | MSE | MSE |
| Evaluation metric | RMSE | RMSE | RMSE | RMSE | RMSE |
| Batch size | 32 | 28 | 40 | 16 | 28 |
| Epochs | 80 | 80 | 80 | 80 | 80 |
| Variable | Calibration | Validation | ||||
|---|---|---|---|---|---|---|
| Observed | Simulated | Residual | Observed | Simulated | Residual | |
| Peak Discharge (m3/s) | 2.24 | 2.24 | 0.000 | 3.01 | 3.01 | 0.001 |
| Volume (103 m3) | 2029.437 | 2174.594 | 145.157 | 1576.701 | 1463.063 | 113.638 |
| Date of peak | 24 January 2019, 08:15 | 24 January 2019, 08:15 | - | 12 January 2021, 21:30 | 12 January 2021, 21:30 | - |
| Variable | Calibration | Validation | ||
|---|---|---|---|---|
| Value | Performance | Value | Performance | |
| NSE | 0.77 | Very good | 0.74 | Good |
| PBIAS | 6.68% | Very good | −7.77% | Very good |
| RMSE Std DEV | 0.48 | Very good | 0.51 | Good |
| R2 | 0.81 | Very good | 0.80 | Very good |
| Root Mean Squared Error (RMSE) | 15 min | 30 min | 45 min | 60 min |
|---|---|---|---|---|
| Vanilla LSTM | 0.0073 | 0.0085 | 0.0096 | 0.0109 |
| Stacked LSTM | 0.0073 | 0.0086 | 0.0101 | 0.0113 |
| Bidirectional LSTM | 0.0075 | 0.0087 | 0.0093 | 0.0101 |
| Encoder–Decoder LSTM | 0.0073 | 0.0087 | 0.0100 | 0.0110 |
| Encoder–Decoder Bi-LSTM | 0.0073 | 0.0086 | 0.0097 | 0.0108 |
| Coefficient of Determination (R2) | 15 min | 30 min | 45 min | 60 min |
| Vanilla LSTM | 0.9654 | 0.9541 | 0.9404 | 0.9231 |
| Stacked LSTM | 0.9657 | 0.9531 | 0.9347 | 0.9187 |
| Bidirectional LSTM | 0.9635 | 0.9516 | 0.9439 | 0.9347 |
| Encoder–Decoder LSTM | 0.9661 | 0.9517 | 0.9361 | 0.9217 |
| Encoder–Decoder Bi-LSTM | 0.9654 | 0.9525 | 0.9393 | 0.9244 |
| Root Mean Squared Logarithmic Error (RMSLE) | 15 min | 30 min | 45 min | 60 min |
| Vanilla LSTM | 0.0068 | 0.0075 | 0.0084 | 0.0093 |
| Stacked LSTM | 0.0068 | 0.0076 | 0.0086 | 0.0094 |
| Bidirectional LSTM | 0.0071 | 0.0080 | 0.0084 | 0.0089 |
| Encoder–Decoder LSTM | 0.0068 | 0.0078 | 0.0088 | 0.0096 |
| Encoder–Decoder Bi-LSTM | 0.0069 | 0.0078 | 0.0086 | 0.0093 |
| Mean Absolute Error (MAE) | 15 min | 30 min | 45 min | 60 min |
| Vanilla LSTM | 0.0033 | 0.0034 | 0.0037 | 0.0039 |
| Stacked LSTM | 0.0032 | 0.0035 | 0.0037 | 0.0039 |
| Bidirectional LSTM | 0.0033 | 0.0037 | 0.0039 | 0.0041 |
| Encoder–Decoder LSTM | 0.0032 | 0.0037 | 0.0040 | 0.0043 |
| Encoder–Decoder Bi-LSTM | 0.0033 | 0.0036 | 0.0038 | 0.0040 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutsovili, E.-I.; Tzoraki, O.; Theodossiou, N.; Tsekouras, G.E. Early Flood Monitoring and Forecasting System Using a Hybrid Machine Learning-Based Approach. ISPRS Int. J. Geo-Inf. 2023, 12, 464. https://doi.org/10.3390/ijgi12110464
Koutsovili E-I, Tzoraki O, Theodossiou N, Tsekouras GE. Early Flood Monitoring and Forecasting System Using a Hybrid Machine Learning-Based Approach. ISPRS International Journal of Geo-Information. 2023; 12(11):464. https://doi.org/10.3390/ijgi12110464
Chicago/Turabian StyleKoutsovili, Eleni-Ioanna, Ourania Tzoraki, Nicolaos Theodossiou, and George E. Tsekouras. 2023. "Early Flood Monitoring and Forecasting System Using a Hybrid Machine Learning-Based Approach" ISPRS International Journal of Geo-Information 12, no. 11: 464. https://doi.org/10.3390/ijgi12110464