1. Introduction
Image segmentation has become a quite common pre-processing task in remote sensing. It involves sub-dividing an image into relatively homogeneous image regions (polygons) often referred to as “image segments” or “image objects” [
1]. These image segments are then used for further image processing (e.g., object-based classification or regression tasks), either instead of [
1,
2,
3,
4,
5] or in combination with [
6,
7,
8] individual pixels. Descriptors of the pixels located within an image segment, such as the pixels’ reflectance values at different electromagnetic wavelengths, are typically used to derive several of the segment’s descriptors, such as its mean reflectance value at different electromagnetic wavelengths. Mean spectral values (e.g., radiance, reflectance,
etc.) are probably the most commonly-used descriptors of image segments, although textural descriptors and geometric descriptors are also often used (e.g., [
2,
4,
5,
9]). In this study, the focus is on mean spectral values of image segments, derived from the pixels within each segment.
Existing methods for calculating mean spectral values involve assigning equal weights to all pixels within a segment, as shown in
Figure 1. However, for various reasons, it may be preferable to derive the mean spectral values using a weighted calculation method rather than by simply weighting all pixels equally. For example, as shown in
Figure 2, in some cases a segment may intersect one or more pixels, causing the pixels to be located only partially within the segment (
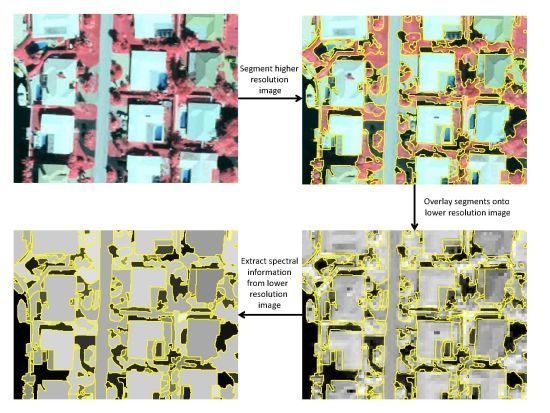
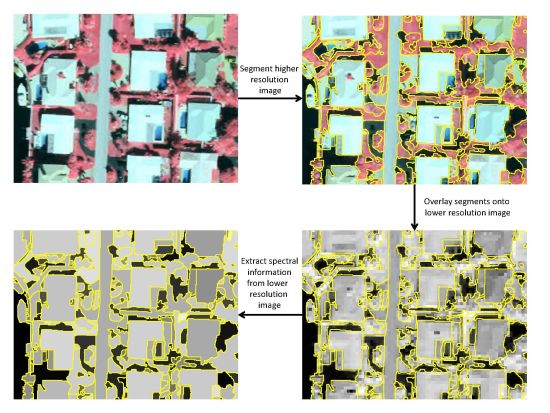
i.e., “partial sub-objects” of the segment). This often occurs if a higher spatial resolution (HSR) image is segmented and then the segment polygons are overlaid onto a lower spatial resolution (LSR) image to derive additional descriptors of the segments, such as higher spectral resolution [
10,
11] or higher temporal resolution information. Compared to pixel-based image fusion, which is relatively common nowadays in remote sensing [
12], few studies have investigated fusion at the segment (polygon) level [
10,
13,
14]. Here, for simplicity this procedure is referred to as segment-level fusion (also referred to as pixel/feature-level fusion in [
11]).
Figure 1.
An image segment polygon (bold line) overlaid onto a grid of pixels with intensity values (a); the weights assigned to the pixels within the polygon (b); new values calculated by multiplying the pixel intensity values by their weights (c); the mean segment intensity value (d); calculated by dividing the sum of the values in (c) by the sum of the weights in (b).
Figure 1.
An image segment polygon (bold line) overlaid onto a grid of pixels with intensity values (a); the weights assigned to the pixels within the polygon (b); new values calculated by multiplying the pixel intensity values by their weights (c); the mean segment intensity value (d); calculated by dividing the sum of the values in (c) by the sum of the weights in (b).
The most simple segment-level fusion approach is to resample the LSR image to match the HSR image that the segments were derived from, as shown in
Figure 2, and then calculate the mean segment value from the resampled pixels. Here, this is referred to as the unweighted segment-level fusion (USF) approach, and it is implemented (or easy to implement) in commonly-used image segmentation software packages such as Trimble’s eCognition [
15]. However, partial sub-objects are not ideal as segment descriptors because they are derived, in part, from locations outside of the segment they are describing. This makes them less accurate descriptors of the segment than pixels located completely within the segment at their original spatial resolution (
i.e., the “true sub-objects” of the segment). In addition to these problems related to partial sub-objects, true sub-objects of a segment may also contain unwanted noise from nearby areas, particularly the true sub-objects located adjacent to segment boundaries. This noise can be caused by many factors, including diffuse electromagnetic reflection from nearby land cover objects, motion blur, and/or geo-location errors in one or more of the images. Thus in many cases the pixels located on or near a segment’s boundary will be less accurate descriptors of the segment than the pixels located at more interior locations within the segment. So, while previous studies on segment-level fusion have used the USF approach, it may be preferable to instead adjust the weights of pixels based on their distance from segment boundaries (
i.e., reduce the weight of resampled pixels located near segment boundaries) for mean segment value calculations.
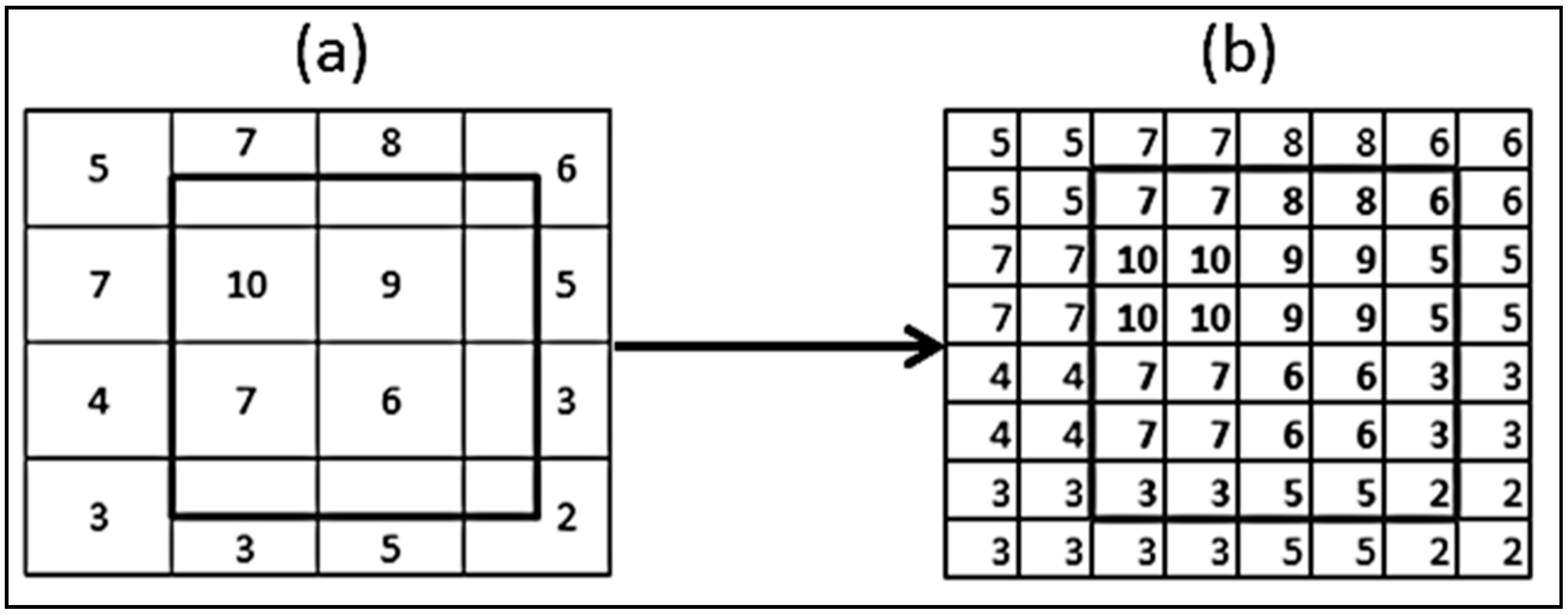
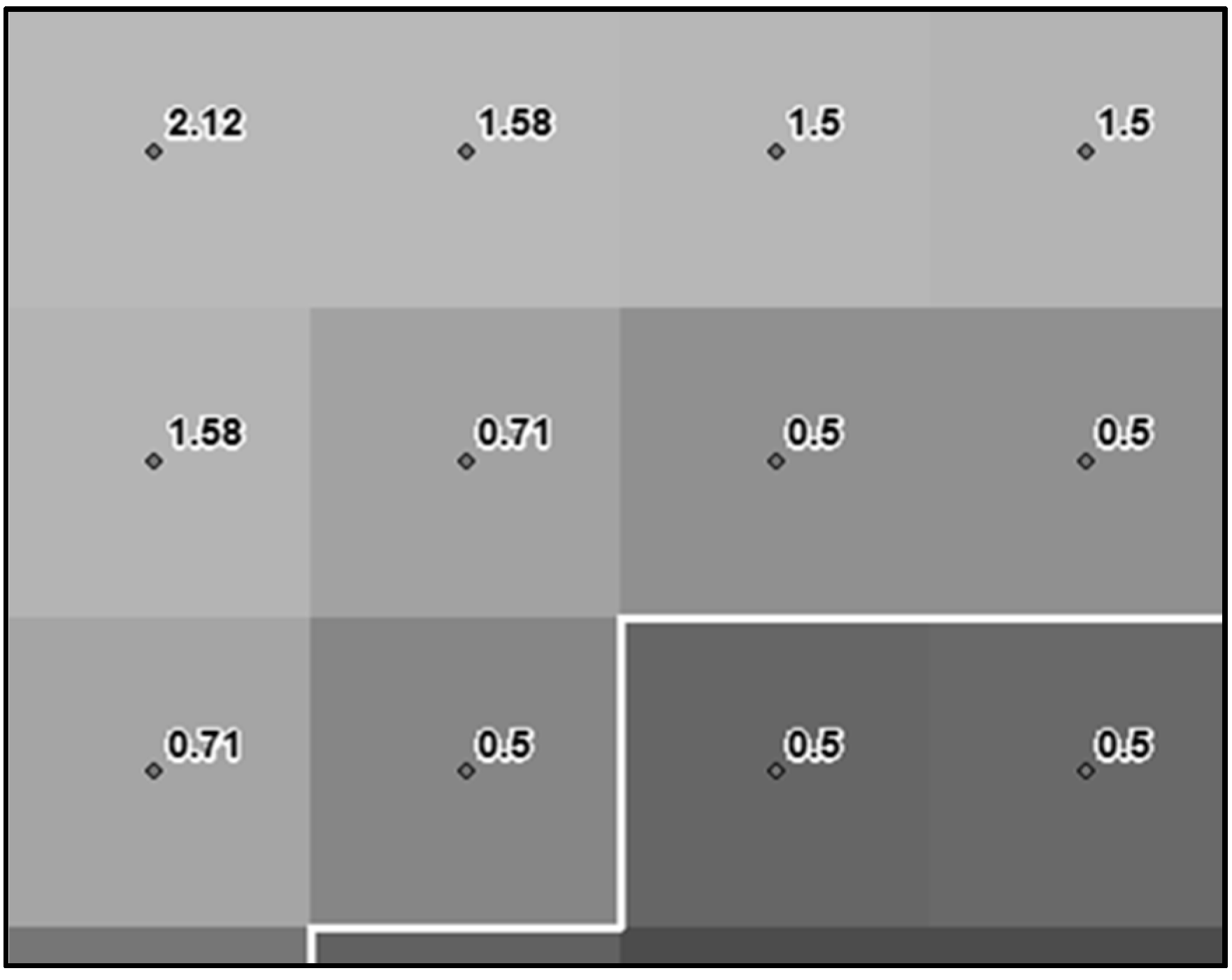
Figure 2.
Image segment polygon (bold line) overlaid onto a grid of pixels with intensity values (a). The intersected pixels in (a) are the partial sub-objects of the segment, while the pixels located completely within the segment are the true sub-objects of the segment. The pixels from (a) are resampled to ½ of their original spatial resolution (e.g., from 30 m to 15 m resolution) using nearest neighbor resampling, and the intensity values of the resampled pixels are shown in (b).
Figure 2.
Image segment polygon (bold line) overlaid onto a grid of pixels with intensity values (a). The intersected pixels in (a) are the partial sub-objects of the segment, while the pixels located completely within the segment are the true sub-objects of the segment. The pixels from (a) are resampled to ½ of their original spatial resolution (e.g., from 30 m to 15 m resolution) using nearest neighbor resampling, and the intensity values of the resampled pixels are shown in (b).
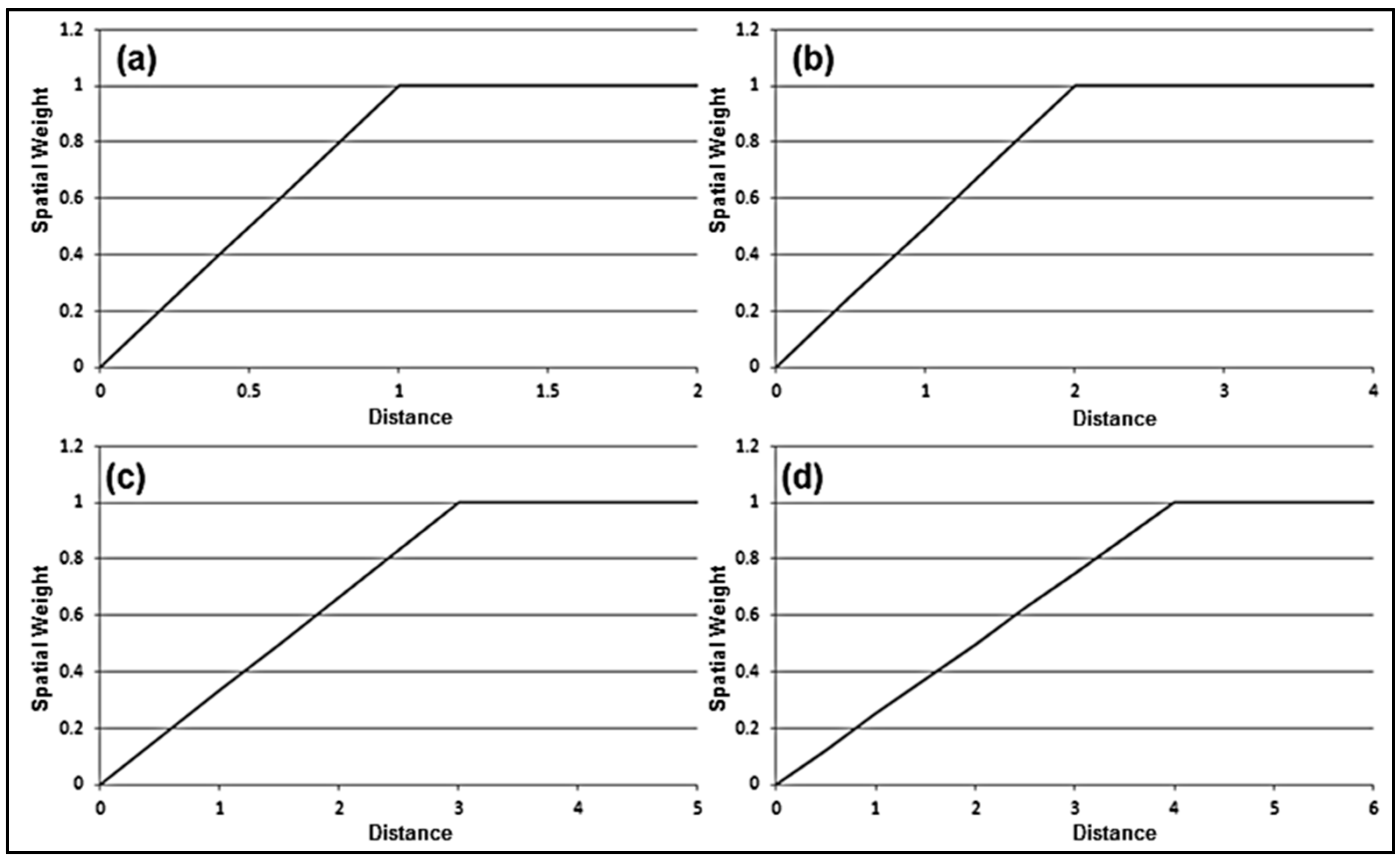
In this study, a spatially-weighted segment-level fusion (SWSF) approach is proposed to derive mean segment values from a LSR image. The proposed approach involves: (1) segmenting a HSR image; (2) resampling a LSR image to match the HSR image; (3) calculating a spatial weight for each resampled LSR pixel based on its Euclidean distance from the boundary of the segment it is located within; and (4) calculating the mean value of each segment based on the values of the resampled LSR pixels and their spatial weights. The proposed SWSF approach is compared with the traditional USF approach to determine which is more suitable for segment-level fusion of images with different spatial resolutions. We evaluated the performance of SWSF and USF using two case studies. The first involved extracting spectral values of urban land cover features in a very high (0.3 m) resolution image, and the second involved classifying a high (6.5 m) resolution image of a mixed agricultural/forested area.
3. Results and Discussion
3.1. Case Study 1: Urban Area
The main findings for the urban case study, shown in
Table 1, were: (1) the proposed SWSF approach resulted in lower MAE and RMSE values than the traditional USF approach when the ratio of the LSR image resolution to the HSR image resolution was 3:1 (0.9 m:0.3 m) or higher; (2) the most effective spatial weighting scheme differed based on the spatial resolution of the LSR image relative to the HSR image; and (3) MAE and RMSE values increased as the spatial resolution of the LSR image decreased (as should be expected).
With regards to the performance of the different SWSF weighting schemes, there were clear trends for each LSR image. For the 0.6 m (2:1 ratio) and 0.9 m (3:1 ratio) images, MAE and RMSE increased as the weights of edge pixels decreased (i.e., from W1 to W9). For the 1.5 m image (5:1 ratio), the errors decreased as the weights of edge pixels decreased until W2–W3, and then increased again as the weights of edge pixels further decreased. Finally, for the 3.0 m image (10:1 ratio), errors decreased as the weights of edge pixels decreased, but there were no significant changes after W5–W6. For all of the LSR images, there were few changes in MAE and RMSE values for W6–W9 because many segments did not have any pixels with distances of greater than 6 from their boundary.
Table 1.
Mean Average Error (MAE) and Root Mean Square Error (RMSE) of the mean segment values extracted from the lower spatial resolution images. Bold values indicate the lowest MAE and RMSE values for each image. USF, unweighted segment-level fusion approach; W1–W9, spatial weighting schemes 1–9.
Table 1.
Mean Average Error (MAE) and Root Mean Square Error (RMSE) of the mean segment values extracted from the lower spatial resolution images. Bold values indicate the lowest MAE and RMSE values for each image. USF, unweighted segment-level fusion approach; W1–W9, spatial weighting schemes 1–9.
| Spatial Weighting Scheme | MAE | RMSE |
|---|
| 0.6 m Image (2:1) | 0.9 m Image (3:1) | 1.5 m Image (5:1) | 3.0 m Image (10:1) | 0.6 m Image (2:1) | 0.9 m Image (3:1) | 1.5 m Image (5:1) | 3.0 m Image (10:1) |
|---|
| None (USF) | 1.63 | 3.51 | 9.23 | 22.91 | 3.04 | 5.22 | 15.29 | 32.75 |
| W1 | 2.36 | 2.55 | 8.38 | 21.82 | 3.24 | 4.23 | 14.81 | 31.82 |
| W2 | 4.69 | 4.21 | 7.81 | 20.84 | 5.76 | 5.58 | 14.15 | 31.25 |
| W3 | 5.75 | 5.23 | 8.05 | 20.16 | 7.04 | 6.67 | 14.04 | 30.85 |
| W4 | 6.20 | 5.71 | 8.34 | 19.80 | 7.58 | 7.21 | 14.12 | 30.67 |
| W5 | 6.38 | 5.92 | 8.50 | 19.64 | 7.82 | 7.45 | 14.20 | 30.59 |
| W6 | 6.47 | 6.02 | 8.59 | 19.59 | 7.93 | 7.57 | 14.24 | 30.57 |
| W7 | 6.52 | 6.07 | 8.64 | 19.58 | 7.99 | 7.63 | 14.27 | 30.57 |
| W8 | 6.55 | 6.10 | 8.66 | 19.58 | 8.01 | 7.66 | 14.29 | 30.57 |
| W9 | 6.56 | 6.11 | 8.68 | 19.58 | 8.03 | 7.68 | 14.30 | 30.57 |
To understand the reason for the differing trends and different optimal spatial weighting schemes for each LSR image, it is useful to take into account the distance range from segment boundaries at which partial sub-objects occur in each LSR image. In this study, the HSR and LSR images were perfectly co-registered, so it was relatively simple to calculate the distance from segment boundaries at which partial sub-objects could be found. For example, as shown in
Figure 2, at a 2:1 ratio, a partial sub-object could be located up to one pixel from a segment boundary because one LSR pixel becomes four (2 × 2) resampled HSR pixels. Following this logic, the maximum distance (
Dmax) of the range is given by:
So, at a 3:1 ratio, a partial sub-object could be located up to two pixels from a segment boundary; at a 5:1 ratio, up to four pixels; at a 10:1 ratio, up to nine pixels. Given these distance ranges, the optimum weighting schemes should be: W1 (or possibly USF) for the 0.6 m resolution image, between W1–W2 for the 0.9 m image, between W1–W4 for the 1.5 m image, and between W1–W9 for the 3.0 m resolution image. In terms of actual performance, for the 0.6 m resolution image, USF performed best, followed by W1. For the 0.9 m image, W1 performed best. For the 1.5 m image, the optimal weighting schemes—W2 and W3—were at the middle of the expected range. For the 3.0 m resolution image, the optimal weighting schemes were W7–W9, though no major changes occurred after W5, which was also around the middle of the expected range. These results suggest that an appropriate spatial weighting scheme for SWSF would be around the middle of the range in which partial sub-objects exist, which should be somewhat expected because it represents a good balance between penalizing too many or too few pixels near segment boundaries (since only a fraction of the partial sub-objects are located at the maximum and minimum ends of the range). In practice, the LSR and HSR images may not be perfectly co-registered, but Equation (2) should still provide a reasonable estimate of the distance range at which partial sub-objects would be located.
3.2. Case Study 2: Mixed Agricultural/Forested Area
For the agricultural/forested area case study, the SWSF classified “vegetation”/”non-vegetation” map had a higher overall classification accuracy (OA; 0.967) and kappa coefficient (
; 0.873) than the USF map (OA of 0.962 and
of 0.853) when evaluated against the baseline HSR map, as shown in
Table 2. To test whether the classification results of SWSF and USF were statistically significant, a pairwise z-test [
19] was performed, with the null hypothesis being that there was no significant difference between the two classifications. A z-score of 14.96 was obtained, indicating that the difference between the two classifications was statistically significant at a 99% confidence level. As shown in
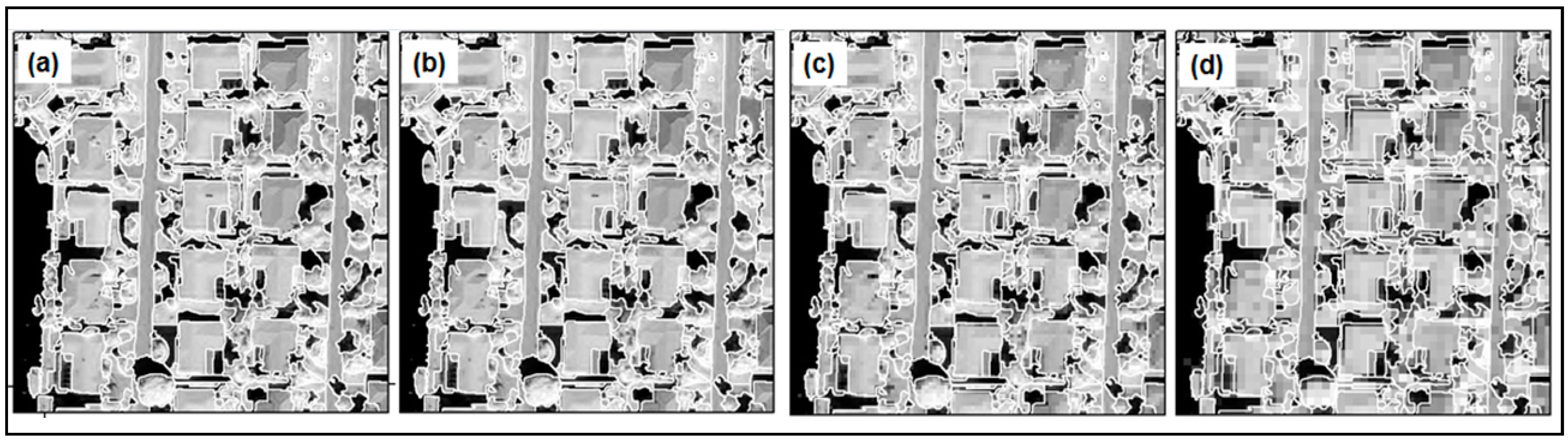
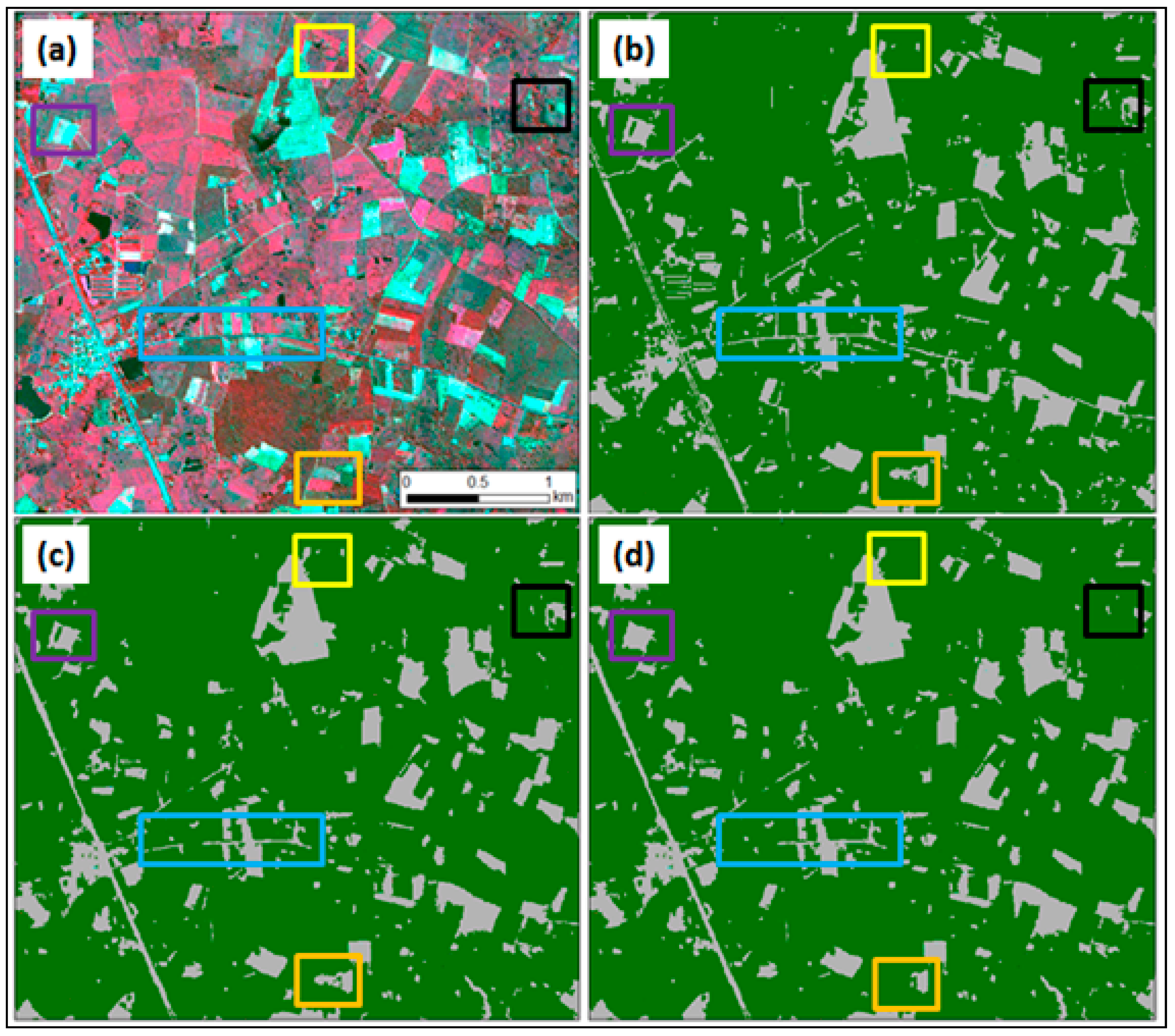
Figure 6, SWSF produced more accurate results for many small and/or thin image segments that were surrounded by a different land cover class. However, for relatively large image segments, or any segments that were surrounded by other segments belonging to the same land cover class, the classification results of SWSF and USF were basically identical.
These results indicate that SWSF can achieve higher classification accuracy than USF, although in some cases (e.g., for mapping large, non-linear features like large forest patches or agricultural fields) it may not be worth the extra processing effort. On the other hand, SWSF may have some significant advantages compared to USF in other cases, e.g., for mapping land use/land cover (LULC) change, as SWSF should be able to better detect small LULC conversions as well as new thin linear features like roads, which are often drivers of future LULC change [
20].
Table 2.
Error matrices for the spatially-weighted segment-level fusion (SWSF) and USF object-based classifications (compared against the baseline higher spatial resolution (HSR) image classification). V, “vegetation”; NV, “non-vegetation”; PA, producer’s accuracy; UA, user’s accuracy; OA, overall accuracy; , kappa coefficient.
Table 2.
Error matrices for the spatially-weighted segment-level fusion (SWSF) and USF object-based classifications (compared against the baseline higher spatial resolution (HSR) image classification). V, “vegetation”; NV, “non-vegetation”; PA, producer’s accuracy; UA, user’s accuracy; OA, overall accuracy; , kappa coefficient.
| SWSF | USF |
|---|
| | V | NV | Total | PA | | V | NV | Total | PA |
|---|
| V | 465,089 | 6015 | 471,104 | 0.987 | V | 464,972 | 6132 | 471,104 | 0.987 |
| NV | 12,610 | 77,224 | 89,834 | 0.860 | NV | 15,157 | 74,677 | 89,834 | 0.831 |
| Total | 477,699 | 83,239 | 560,938 | | Total | 480,129 | 80,809 | 560,938 | |
| UA | 0.974 | 0.928 | | | UA | 0.968 | 0.924 | | |
| | | | | OA = 0.967 = 0.873 | | | | | OA = 0.962 = 0.853 |
Figure 6.
RapidEye image of a mixed agricultural/forested area (a) and the baseline object-based classification of this image (b). Classification results using SWSF (c) and USF (d) to extract spectral values (NDVI) from a simulated 30 m resolution image. Green represents “vegetation” and gray represents “non-vegetation” land cover. Colored rectangles highlight some areas with significant differences between the SWSF and USF classification results.
Figure 6.
RapidEye image of a mixed agricultural/forested area (a) and the baseline object-based classification of this image (b). Classification results using SWSF (c) and USF (d) to extract spectral values (NDVI) from a simulated 30 m resolution image. Green represents “vegetation” and gray represents “non-vegetation” land cover. Colored rectangles highlight some areas with significant differences between the SWSF and USF classification results.
3.3. General Discussion
Based on the results of this study, SWSF can be useful for deriving descriptors of image segments from LSR images, such as high spectral or temporal resolution information, and has the potential to increase the accuracy of subsequent analysis performed on the segments (e.g., classification, extraction of biophysical parameters based on the spectral values of segments,
etc.) when the ratio of the LSR to HSR image resolution is greater than 2:1. Unlike pixel-level fusion methods, which typically work best for fusing images with similar spectral ranges and/or similar acquisition dates [
21], SWSF can be easily applied for fusing any type of imagery (e.g., fusing visible and synthetic aperture radar imagery, visible and thermal imagery,
etc.) because it is insensitive to the correlation between the HSR and LSR images. However, since in many cases pixel-level fusion can be useful for image analysis tasks such as image classification [
22,
23,
24,
25], it should be emphasized that pixel-level fusion could also be performed in combination with SWSF. For example, instead of simply resampling the LSR image to match the HSR image (as was done in this study), a pixel-level image fusion method could first be applied to the LSR image to enhance its spatial quality, and then mean segment values could be extracted from the spatially-enhanced LSR image (instead of the resampled LSR image) using SWSF. Future work could investigate whether this combination of pixel- and segment-level fusion leads to more accurate image analysis than either fusion method alone, and whether it is worth the extra processing time/effort.
It should also be noted that the applications of SWSF are not limited to the extraction of spectral information for image segments (polygons) generated by an automated segmentation algorithm, and in theory can be used for any type of image-to-polygon fusion. For example, it could be used to fuse an image with OpenStreetMap building footprint polygons to extract the reflectance properties of individual rooftops (e.g., for estimating the energy savings potential of the building [
26]), or to fuse an image with manually-digitized polygons of agricultural fields to extract crop-related parameters for each field. Investigation of SWSF (and other image-to-polygon fusion methods) for these types of fusion tasks could also be an interesting future research topic.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
