
Adjustment and Assessment of the Measurements of Low and High Sampling Frequencies of GPS Real-Time Monitoring of Structural Movement




Abstract
:1. Introduction
2. Methodology
2.1. Adaptive-Recursive Least Square Filter
2.2. Extended Kalman Filter
2.3. Wavelet PCA Method
3. Results and Discussion
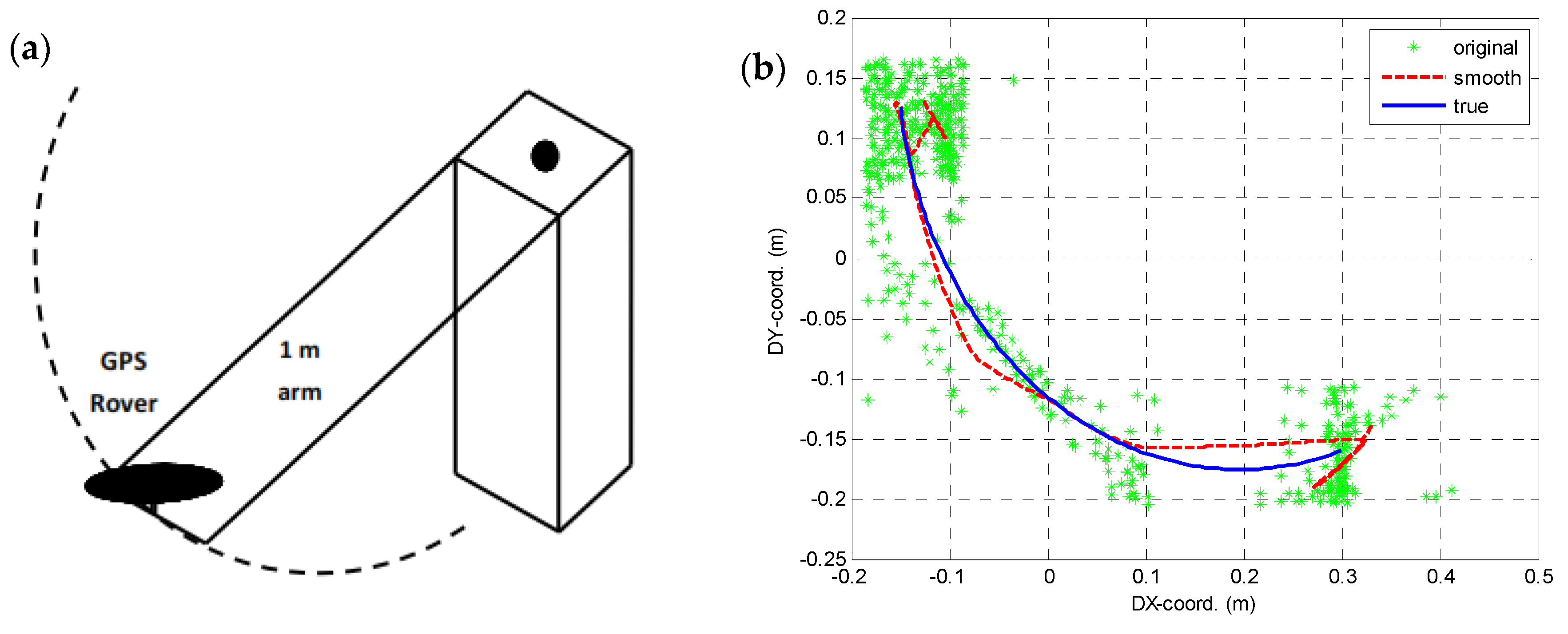
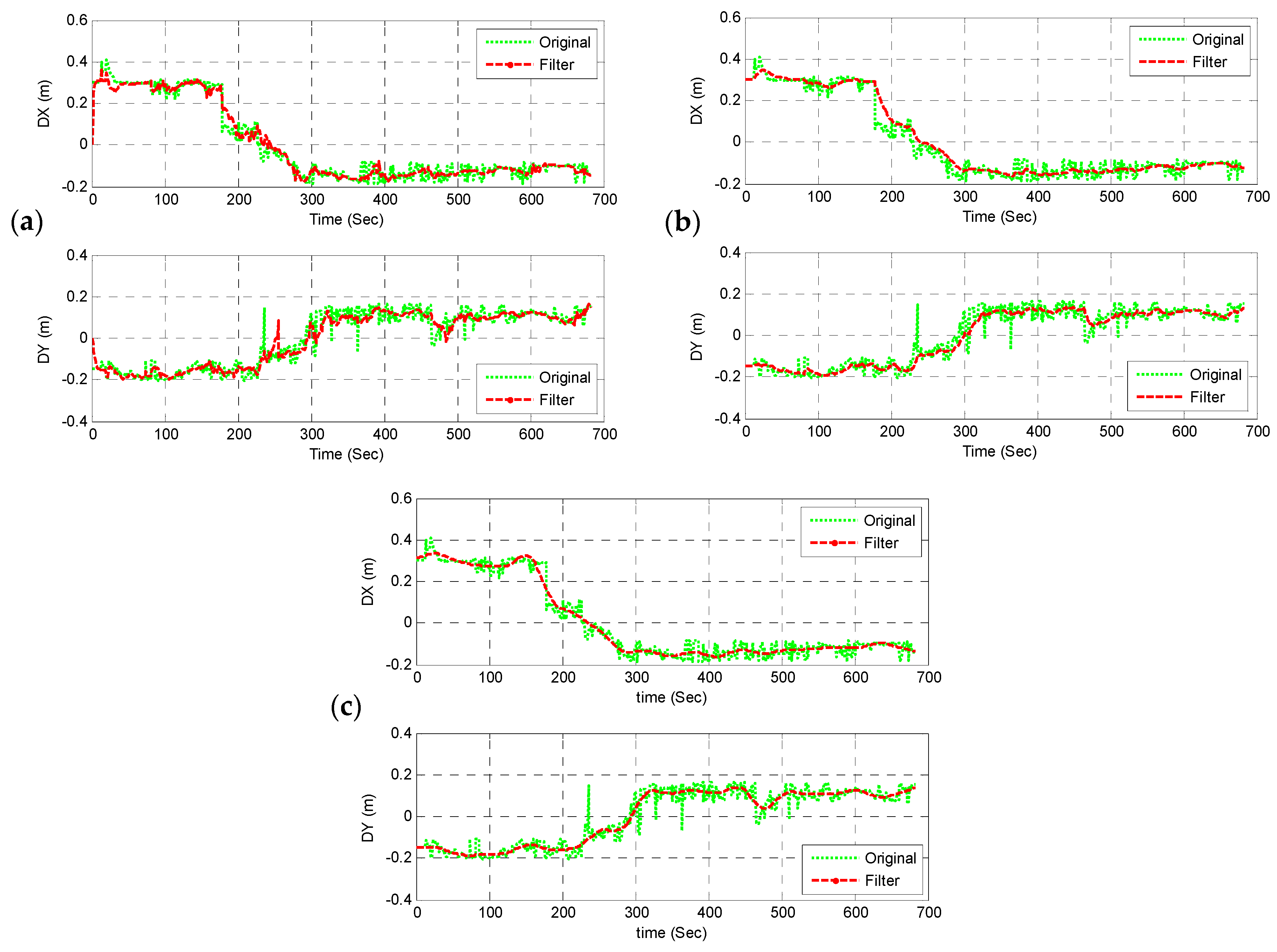
3.1. Evaluation of Method Performance
3.2. Bridge Behavior Evaluation
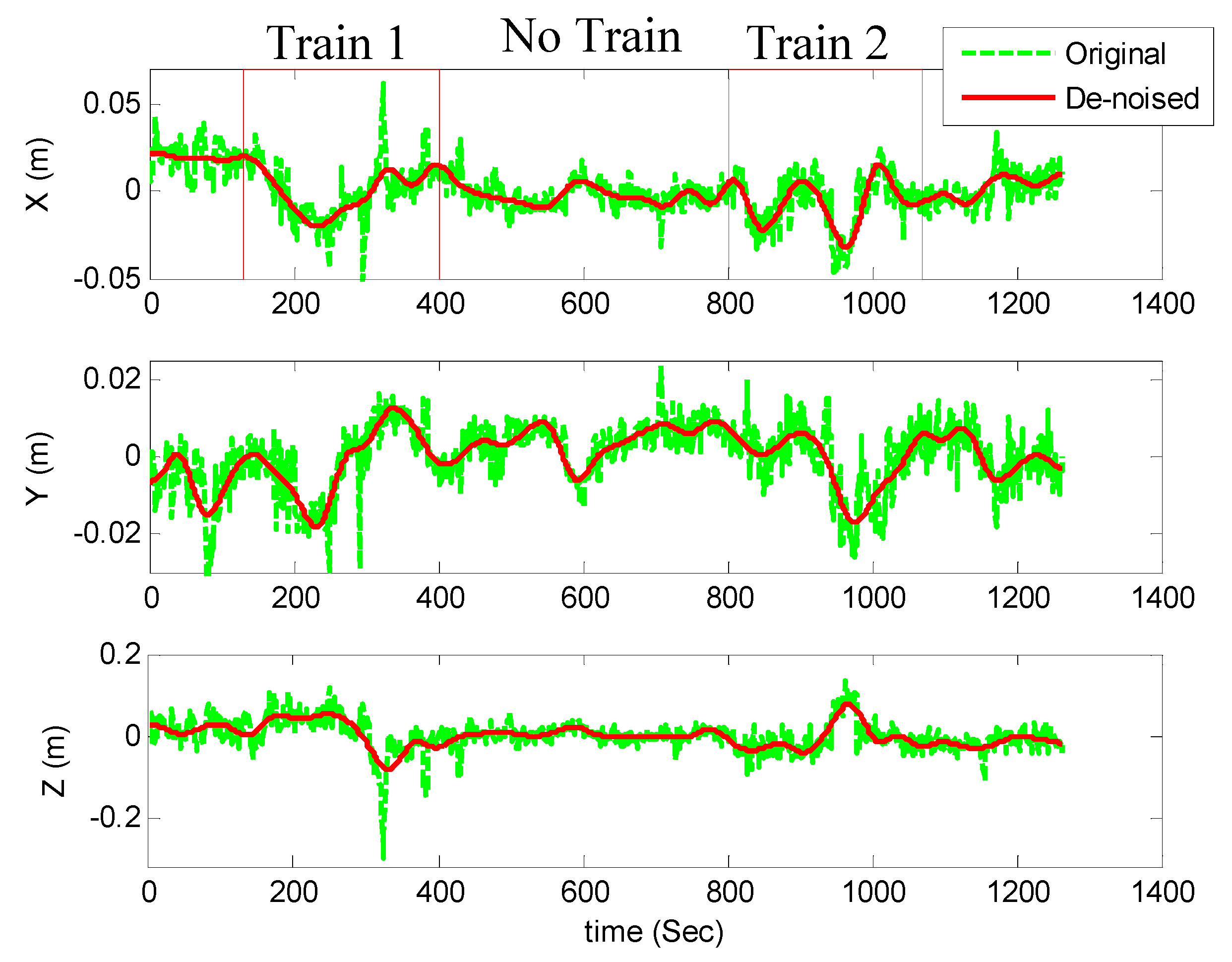
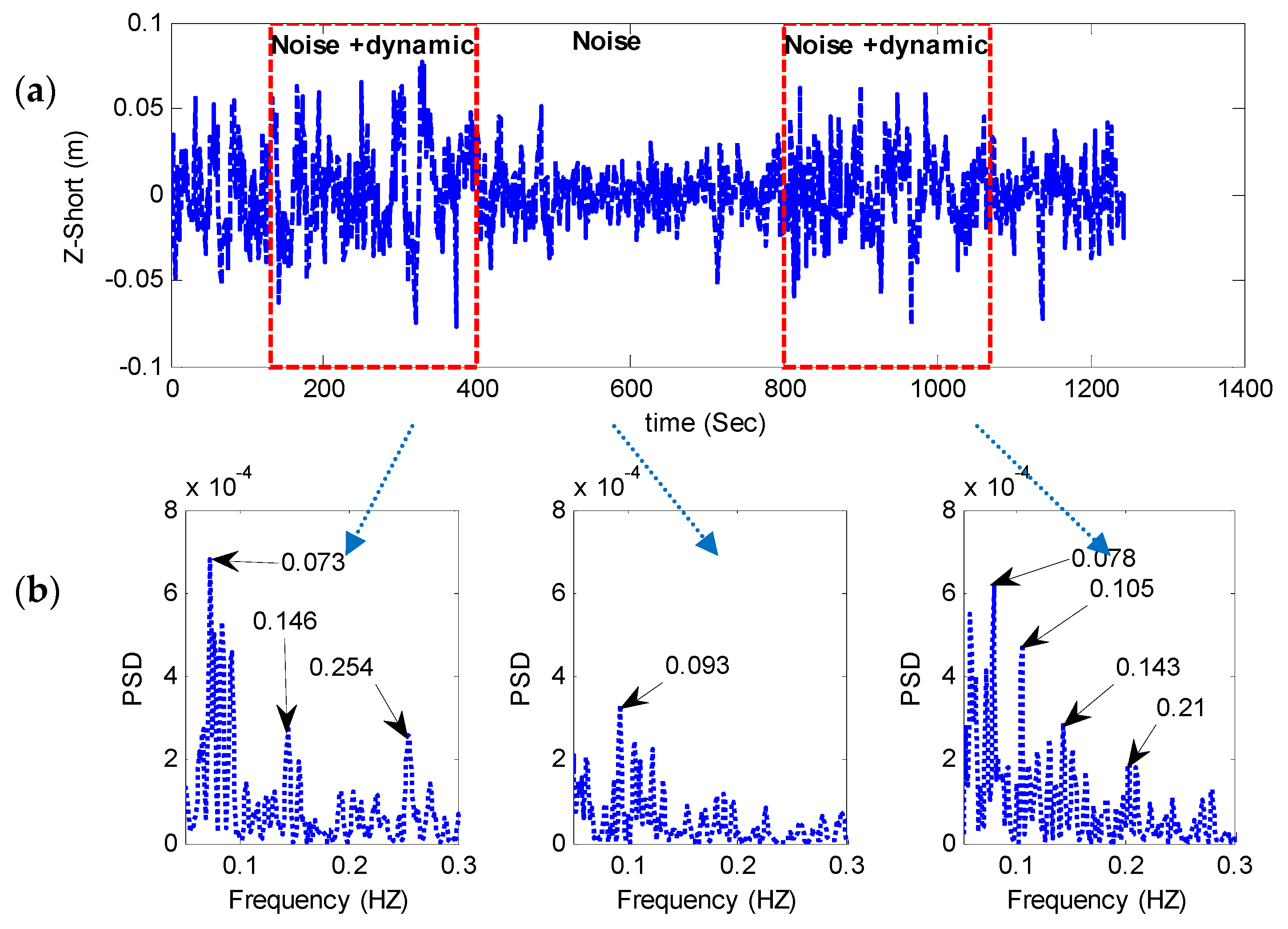
3.2.1. Mansoura Railway Bridge Evaluation
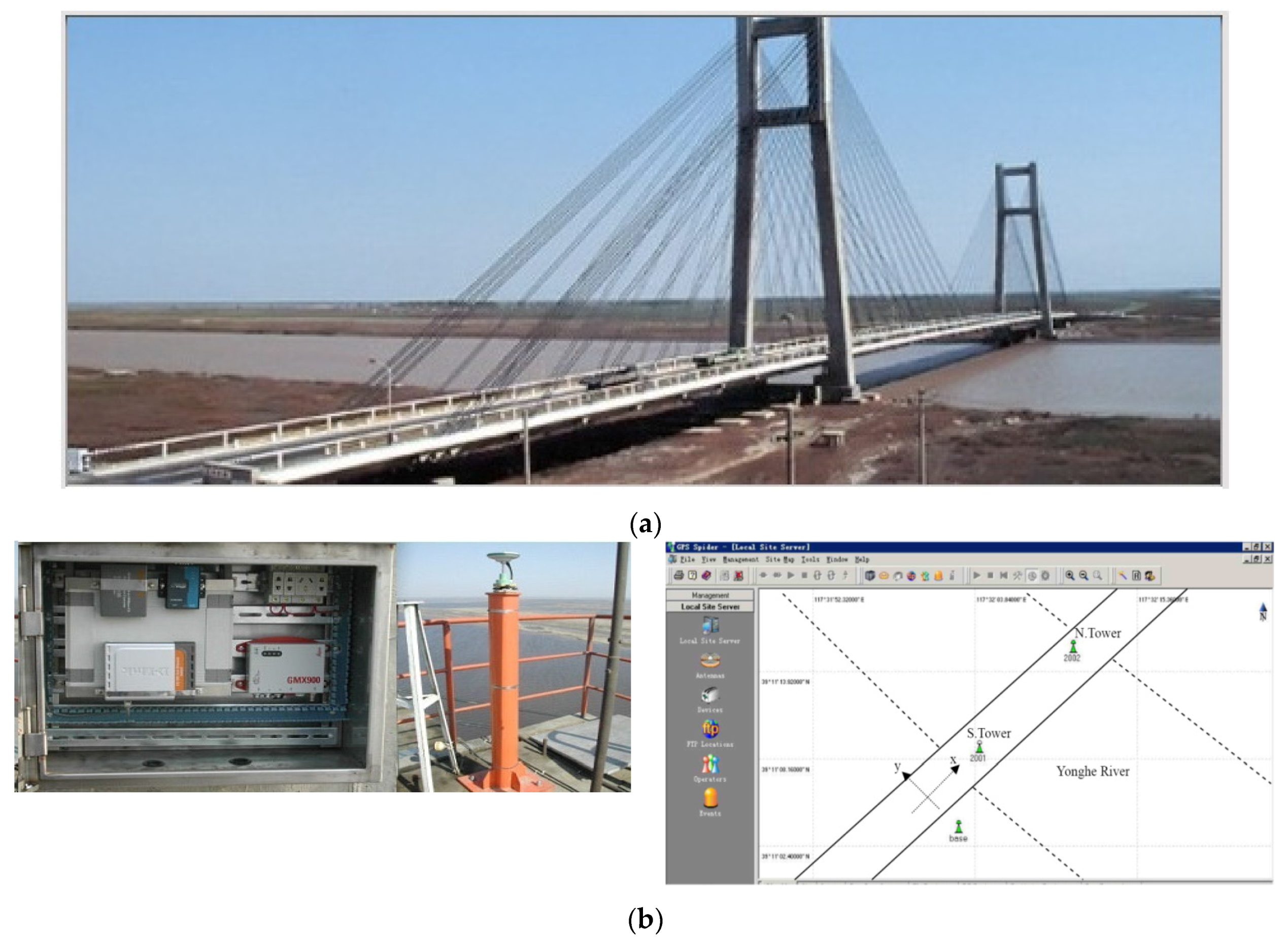
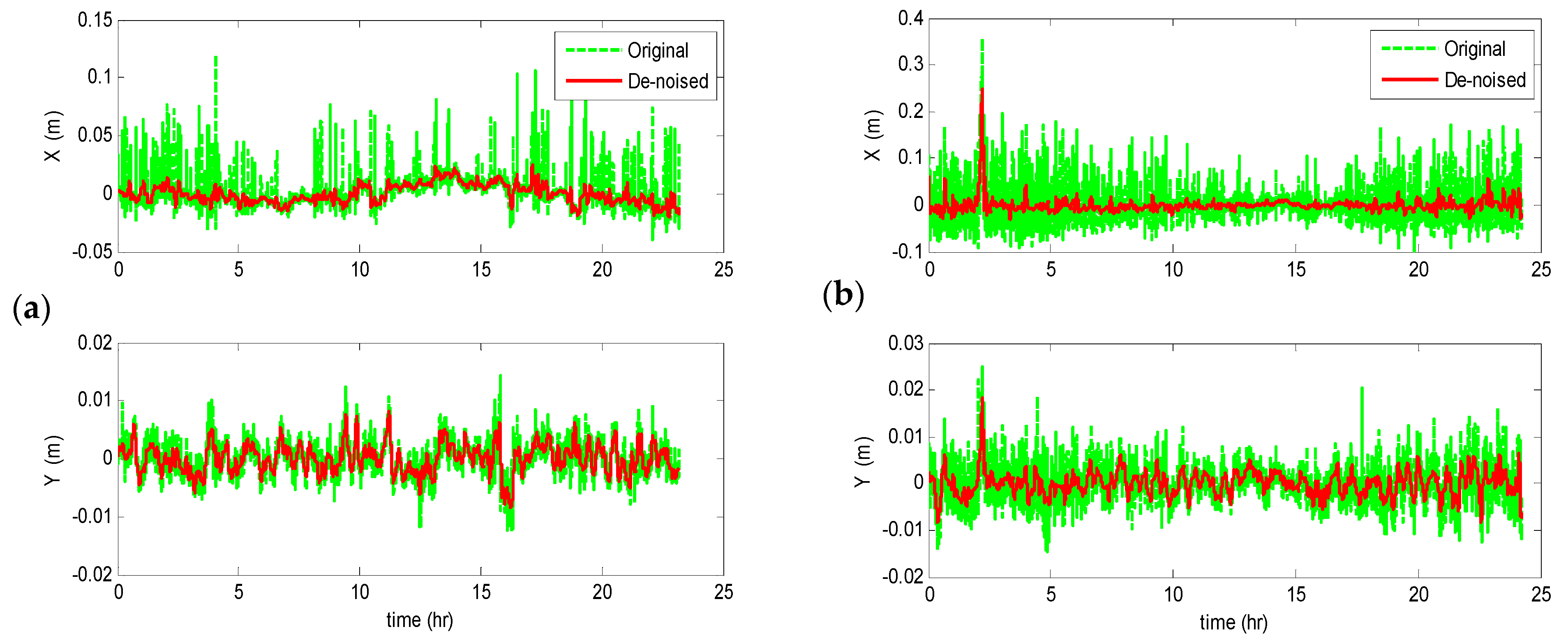
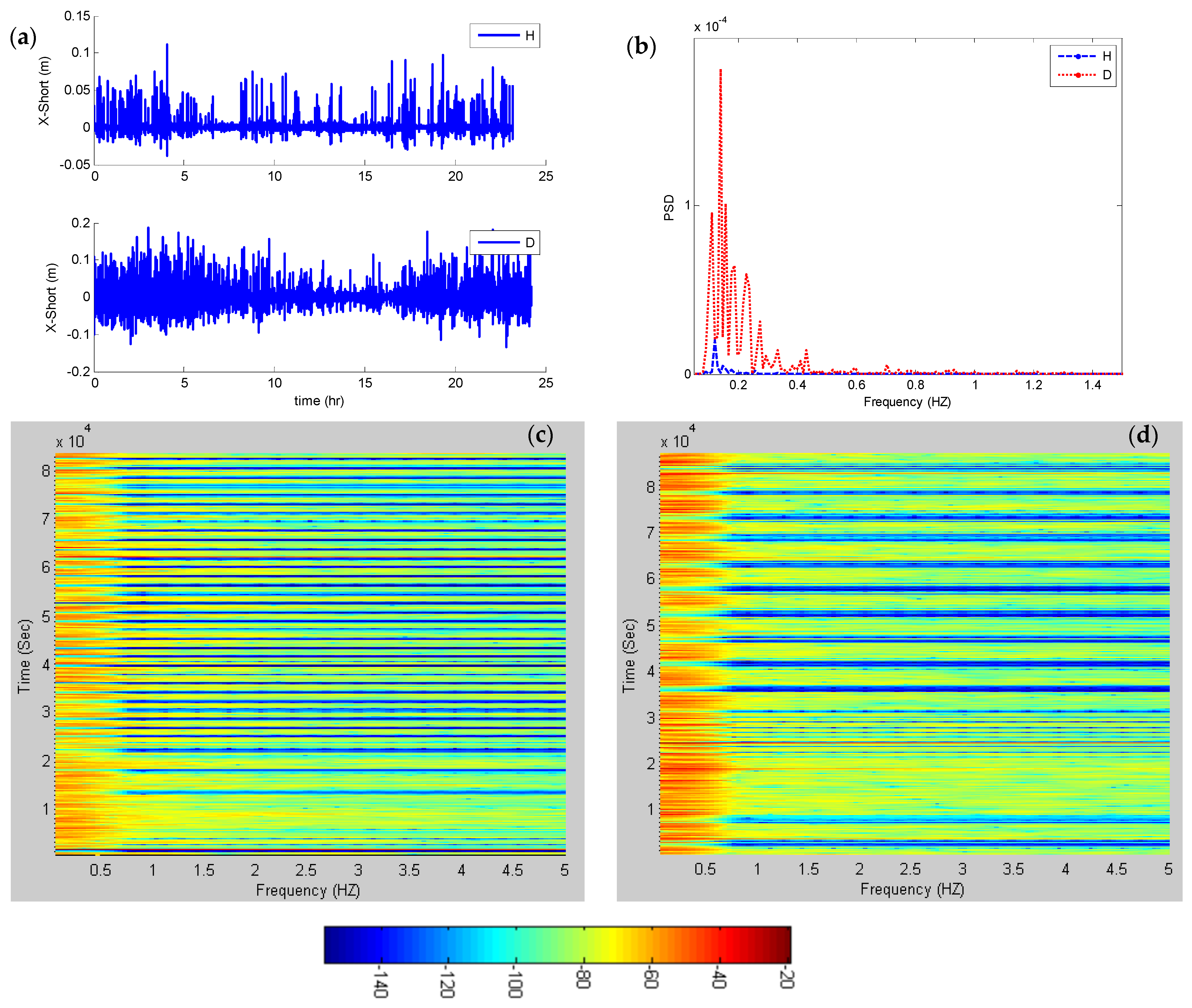
3.2.2. Yonghe Long-Span Bridge Evaluation
4. Summary and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Im, S.B.; Hurlebaus, S.; Kang, Y.J. Summary review of GPS technology for structural health monitoring. J. Struct. Eng. 2013, 139, 1653–1664. [Google Scholar] [CrossRef]
- Yi, T.H.; Li, H.N.; Gu, M. Recent research and applications of GPS-based monitoring technology for high-rise structures. Struct. Control Health Monit. 2013, 20, 649–670. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Noise characteristics of high-frequency, short-duration GPS records from analysis of identical, collocated instruments. Meas. J. Int. Meas. Confed. 2013, 46, 1488–1506. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A.R.; Tiberius, C.; Teunissen, P.J.G. Noise characteristics in high precision GPS positioning. In Proceedings of the 6th Hotine-Marussi Symposium on Theoretical and Computational Geodesy, Wuhan, China, 29 May–2 June 2006.
- Nickitopoulou, A.; Protopsalti, K.; Stiros, S. Monitoring dynamic and quasi-static deformations of large flexible engineering structures with GPS: Accuracy, limitations and promises. Eng. Struct. 2006, 28, 1471–1482. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Measurement of the dynamic displacements and of the modal frequencies of a short-span pedestrian bridge using GPS and an accelerometer. Eng. Struct. 2011, 33, 10–17. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Dynamic deflections of a stiff footbridge using 100-Hz GNSS and accelerometer data. J. Surv. Eng. 2015. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Li, H. Multi input-single output models identification of tower bridge movements using GPS monitoring system. Meas. J. Int. Meas. Confed. 2014, 47, 531–539. [Google Scholar] [CrossRef]
- Yi, T.H.; Li, H.N.; Gu, M. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Meas. J. Int. Meas. Confed. 2013, 46, 420–432. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W. Optimizing the de-noise neural network model for GPS time-series monitoring of structures. Sensors 2015, 15, 24428–24444. [Google Scholar] [CrossRef] [PubMed]
- Feng, M.Q.; Fukuda, Y.; Chen, Y.; Soyoz, S.; Lee, S. Long-Term Structural Performance Monitoring of Bridges. Phase II : Development of Baseline Model and Methodology—Report to the California Department of Transportation; CA07-0245; Department of Civil and Environmental Engineering University of California: Irvine, CA, USA, 2008. [Google Scholar]
- Gomez-Gil, J.; Ruiz-Gonzalez, R.; Alonso-Garcia, S.; Gomez-Gil, F.J. A Kalman filter implementation for precision improvement in Low-Cost GPS positioning of tractors. Sensors 2013, 13, 15307–15323. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Gao, Z. Data processing based on wavelet analysis in structure health monitoring system. J. Comput. 2011, 6, 2686–2691. [Google Scholar] [CrossRef]
- Ding, Y.; Li, A.Q. Structural health monitoring of long-span suspension bridges using wavelet packet analysis. Earthq. Eng. Eng. Vib. 2007, 6, 289–294. [Google Scholar] [CrossRef]
- Ogundipe, O.; Lee, J.K.; Roberts, G.W. Wavelet de-noising of GNSS based bridge health monitoring data. J. Appl. Geod. 2014, 8, 273–281. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Kim, D. De-noising of GPS structural monitoring observation error using wavelet analysis. Geomat. Nat. Hazards Risk 2016, 7, 804–825. [Google Scholar] [CrossRef]
- Oussalah, M.; De Schutter, J. Adaptive Kalman filter for noise identification. Int. Conf. Noise Vib. Eng. 2000, 3, 1–8. [Google Scholar]
- Bhatt, D.; Aggarwal, P.; Devabhaktuni, V.; Bhattacharya, P. A novel hybrid fusion algorithm to bridge the period of GPS outages using low-cost INS. Expert Syst. Appl. 2014, 41, 2166–2173. [Google Scholar] [CrossRef]
- Hwang, J.; Yun, H.; Park, S.K.; Lee, D.; Hong, S. Optimal methods of RTK-GPS/accelerometer integration to monitor the displacement of structures. Sensors 2012, 12, 1014–1034. [Google Scholar] [CrossRef] [PubMed]
- Chan, W.S.; Xu, Y.L.; Ding, X.L.; Dai, W.J. An integrated GPS-accelerometer data processing technique for structural deformation monitoring. J. Geod. 2006, 80, 705–719. [Google Scholar] [CrossRef]
- Meng, X.; Wang, J.; Han, H. Optimal GPS/accelerometer integration algorithm for monitoring the vertical structural dynamics. J. Appl. Geod. 2014, 8, 265–272. [Google Scholar] [CrossRef]
- Elnabwy, M.T.; Kaloop, M.R.; Elbeltagi, E. Talkha steel highway bridge monitoring and movement identification using RTK-GPS technique. Meas. J. Int. Meas. Confed. 2013, 46, 4282–4292. [Google Scholar] [CrossRef]
- Sharma, O.; Janyani, V.; Sancheti, S. Recursive least squares adaptive filter a better ISI compensator. Int. J. Electron. Circuits Syst. 2009, 3, 40–45. [Google Scholar]
- Chen, Y.; Le-Ngoc, T.; Champagne, B.; Xu, C. Recursive least squares constant modulus algorithm for blind adaptive array. IEEE Trans. Signal Process. 2004, 52, 1452–1456. [Google Scholar] [CrossRef]
- Budura, G. Nonlinear systems identification using the Volterra model. Int. Symp. Syst. Theory 2005, 1, 25–30. [Google Scholar]
- Mathews, V.J. Adaptive polynomial filters. IEEE Signal Process. Mag. 1991, 8, 10–26. [Google Scholar] [CrossRef]
- Volterra Series and Nonlinear Adaptive Filters. Available online: http://guillaume.perrin74.free.fr/ChalmersMT2012/Papers/NonLinearFiltering/seminar04.pdf (accessed on 20 August 2016).
- Haykin, S. Adaptive Filter Theory Fifth Edition; Pearson: Upper Saddle River, NJ, USA, 2014. [Google Scholar]
- Trauth, M.H. Matlab® Recipes for Earth Sciences: Second Edition; Springer: Berlin, Germany, 2007. [Google Scholar]
- Cuevas, E.; Zaldivar, D.; Rojas, R. Kalman filter for vision tracking. Measurement 2005, 8, 1–18. [Google Scholar]
- Yang, J.N.; Pan, S.; Huang, H. An adaptive extended Kalman filter for structural damage identifications II: Unknown inputs. Struct. Control Heal. Monit. 2007, 44, 497–521. [Google Scholar] [CrossRef]
- Zhang, H.; Foliente, G.C.; Yang, Y.; Ma, F. Parameter identification of inelastic structures under dynamic loads. Earthq. Eng. Struct. Dyn. 2002, 31, 1113–1130. [Google Scholar] [CrossRef]
- Ribeiro, M.I. Kalman and extended Kalman filters : Concept, derivation and properties. Inst. Syst. Robot. Lisboa Port. 2004, 2, 1–44. [Google Scholar]
- Fourie, S. Advanced process monitoring using wavelet and non-linear principal component analysis. Master’s Thesis, Faculty of Engineering, University of Pretoria, Hatfield, South Africa, 2002. [Google Scholar]
- Bakshi, B.R. Multiscale PCA with application to multivariate statistical process monitoring. AIChE J. 1998, 44, 1596–1610. [Google Scholar] [CrossRef]
- Kaloop, M.; Elbeltagi, E.; Elnabwy, M. Bridge monitoring with wavelet principal component and spectrum analysis based on GPS measurements: Case study of the Mansoura Bridge in Egypt. J. Perform. Constr. Facil. 2015. [Google Scholar] [CrossRef]
- Berber, M.; Arslan, N. Network RTK: A case study in Florida. Meas. J. Int. Meas. Confed. 2013, 46, 2798–2806. [Google Scholar] [CrossRef]
- Li, S.; Li, H.; Liu, Y.; Lan, C.; Zhou, W.; Ou, J. SMC structural health monitoring benchmark problem using monitored data from an actual cable-stayed bridge. Struct. Control Heal. Monit. 2014, 21, 156–172. [Google Scholar] [CrossRef]
- Li, H.; Li, S.; Ou, J.; Li, H. Reliability assessment of cable-stayed bridges based on structural health monitoring techniques. Struct. Infrastruct. Eng. 2012, 8, 829–845. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W. Dynamic performance analysis of the towers of a Long-Span bridge based on GPS monitoring technique. J. Sensors 2016. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W. Stayed-cable bridge damage detection and localization based on accelerometer health monitoring measurements. Shock Vib. 2015. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Given d(t) and x(t); Choose (forgetting factor ()), , while I is the n-by-n identity matrix; then compute: |
|---|
| Assume the last filtered state estimation . Linearize the system dynamics, around Apply the prediction step of the KF to the linearized obtained system dynamics, yielding and , where P is an error covariance matrix. Linearize the observation dynamics, around . Apply KF to the linearized observation dynamics, yielding and |
| Method | Direction | RMS (m) | EPP (m) | ENP (m) | SNR (dp) |
|---|---|---|---|---|---|
| RLS | X | 0.035 | 0.125 | –0.304 | 32.40 |
| Y | 0.036 | 0.190 | –0.213 | 25.91 | |
| EKF | X | 0.034 | 0.0875 | –0.208 | 33.81 |
| Y | 0.034 | 0.244 | –0.166 | 26.93 | |
| WPCA | X | 0.029 | 0.104 | –0.123 | 37.14 |
| Y | 0.033 | 0.256 | –0.184 | 27.59 |
| Event | Parameters | Original | Smoothed | ||||
|---|---|---|---|---|---|---|---|
| X (mm) | Y (mm) | Z (mm) | X (mm) | Y (mm) | Z (mm) | ||
| Train No.1 | Max | 61.82 | 16.38 | 118.39 | 19.59 | 12.46 | 52.67 |
| Min | −53.69 | −29.96 | −298.60 | −20.53 | −18.22 | −82.22 | |
| M | −3.52 × 10−2 | −1.10 | 5.81 | −1.93 × 10−1 | −1.13 | 6.18 | |
| SD | ±16.38 | ±9.96 | ±59.41 | ±12.18 | ±8.70 | ±42.76 | |
| No Train | Max | 29.67 | 23.50 | 59.39 | 15.06 | 9.12 | 20.86 |
| Min | −32.30 | −12.57 | −107.60 | −9.71 | −6.01 | −29.22 | |
| M | −2.27 | 3.73 | 2.27 | −2.17 | 3.80 | 1.83 | |
| SD | ±7.55 | ±5.44 | ±17.51 | ±5.35 | ±4.07 | ±9.42 | |
| Train No.2 | Max | 23.91 | 19.77 | 132.59 | 14.96 | 7.77 | 76.82 |
| Min | −47.01 | −25.90 | −94.60 | −32.10 | −17.31 | −41.32 | |
| M | −6.73 | −1.78 | −5.69 | −6.82 | −1.81 | −5.30 | |
| SD | ±15.32 | ±9.56 | ±41.84 | ±12.46 | ±7.40 | ±33.19 | |
| Parameters | H | D |
|---|---|---|
| Max (mm) | 112.23 | 186.78 |
| M (mm) | 3.67 | 16.00 |
| SD (mm) | ±7.77 | ±25.70 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaloop, M.R.; Hu, J.W.; Elbeltagi, E. Adjustment and Assessment of the Measurements of Low and High Sampling Frequencies of GPS Real-Time Monitoring of Structural Movement. ISPRS Int. J. Geo-Inf. 2016, 5, 222. https://doi.org/10.3390/ijgi5120222
Kaloop MR, Hu JW, Elbeltagi E. Adjustment and Assessment of the Measurements of Low and High Sampling Frequencies of GPS Real-Time Monitoring of Structural Movement. ISPRS International Journal of Geo-Information. 2016; 5(12):222. https://doi.org/10.3390/ijgi5120222
Chicago/Turabian StyleKaloop, Mosbeh R., Jong Wan Hu, and Emad Elbeltagi. 2016. "Adjustment and Assessment of the Measurements of Low and High Sampling Frequencies of GPS Real-Time Monitoring of Structural Movement" ISPRS International Journal of Geo-Information 5, no. 12: 222. https://doi.org/10.3390/ijgi5120222
APA StyleKaloop, M. R., Hu, J. W., & Elbeltagi, E. (2016). Adjustment and Assessment of the Measurements of Low and High Sampling Frequencies of GPS Real-Time Monitoring of Structural Movement. ISPRS International Journal of Geo-Information, 5(12), 222. https://doi.org/10.3390/ijgi5120222