Accuracy Assessment of Landform Classification Approaches on Different Spatial Scales for the Iranian Loess Plateau

 ,
,
Abstract
:1. Introduction
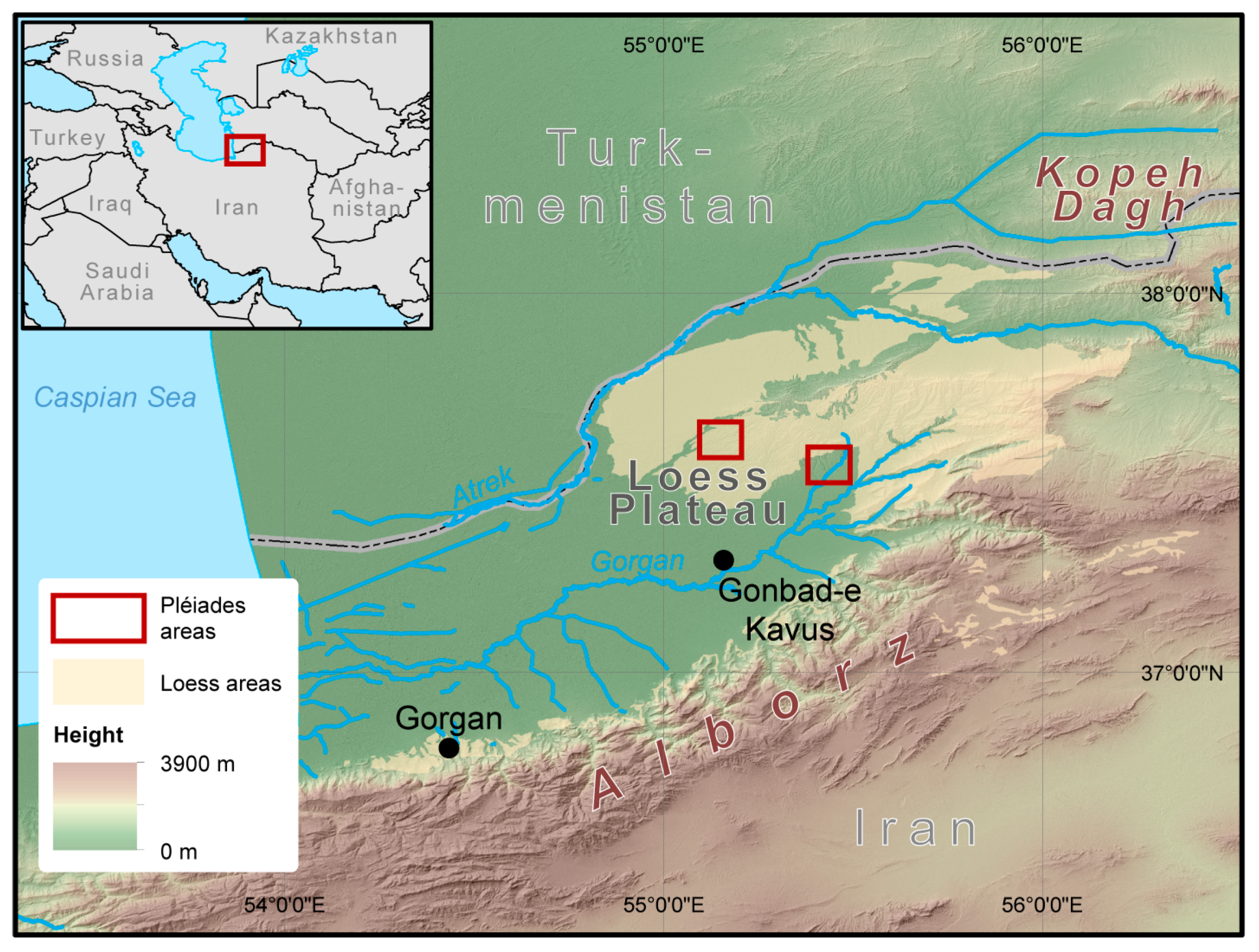
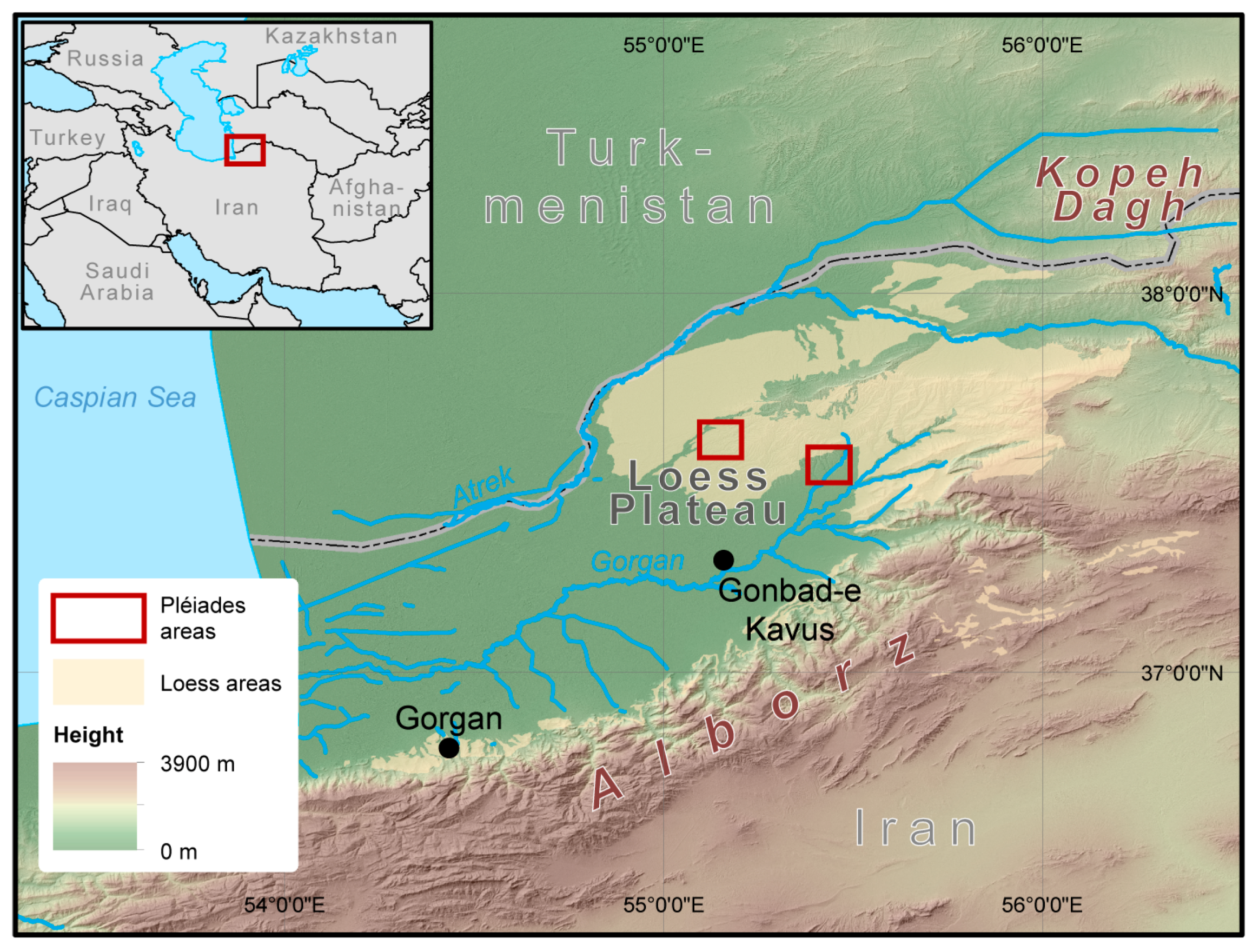
2. Study Area
3. Materials and Methods
3.1. Low Resolution Digital Elevation Models
3.2. High Resolution Digital Elevation Models
3.3. Applied Landform Classifications
3.3.1. The Approach of Dikau
3.3.2. The Topographic Position Index
3.3.3. The Object Based Approach
3.3.4. Geomorphons
3.4. Methodology of Accuracy Assessment
4. Results
4.1. DEM Accuracy
4.2. Classification Results
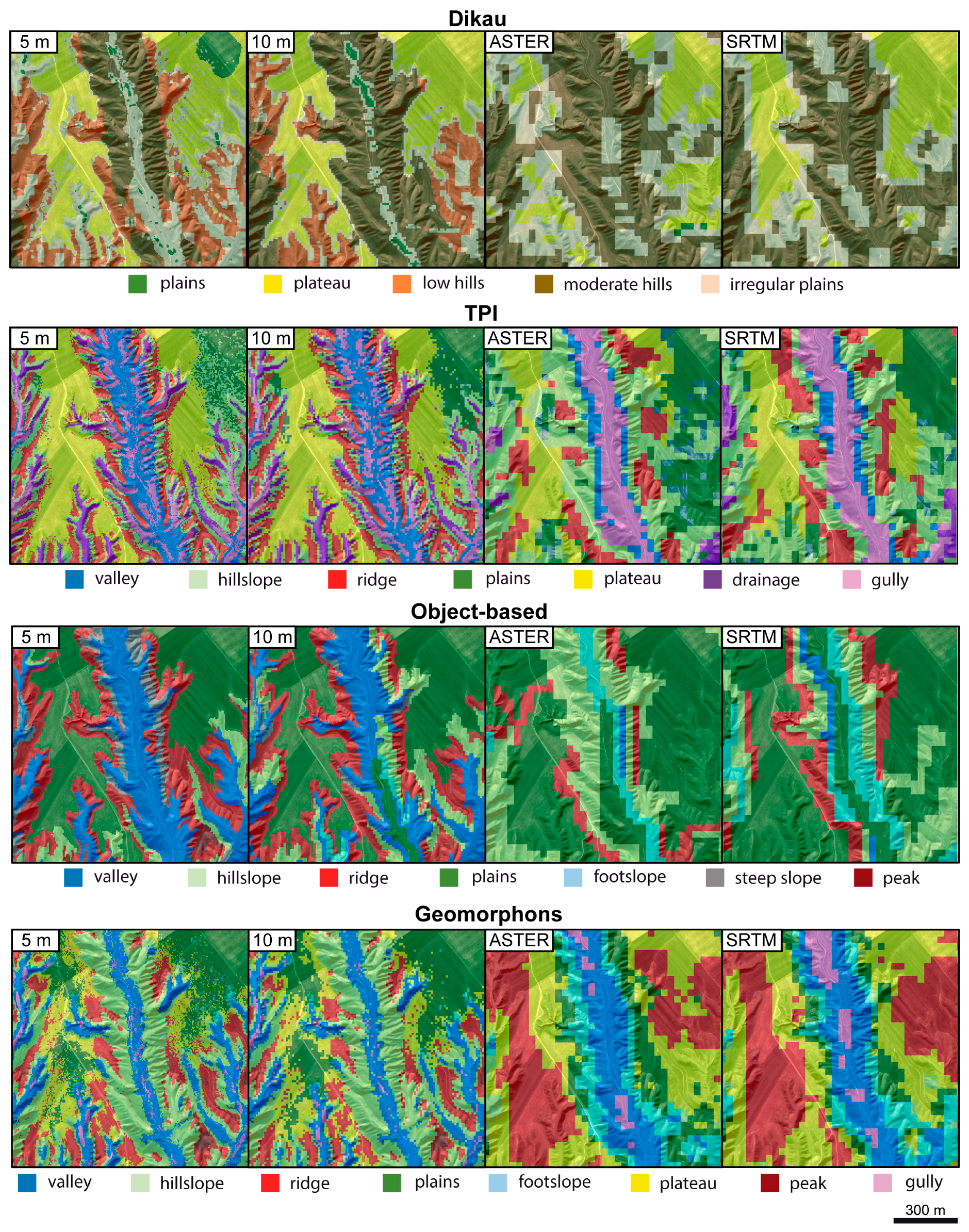
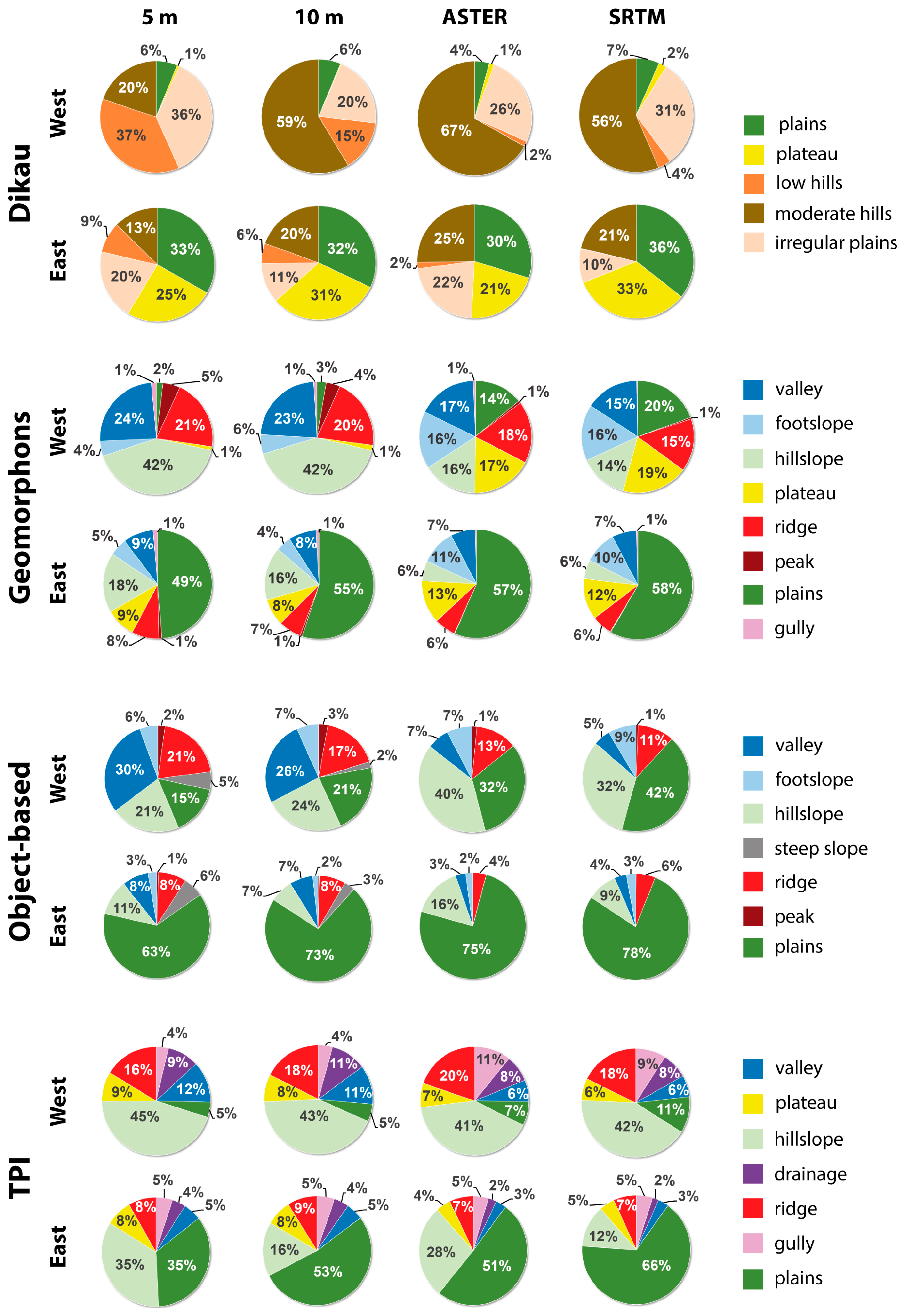
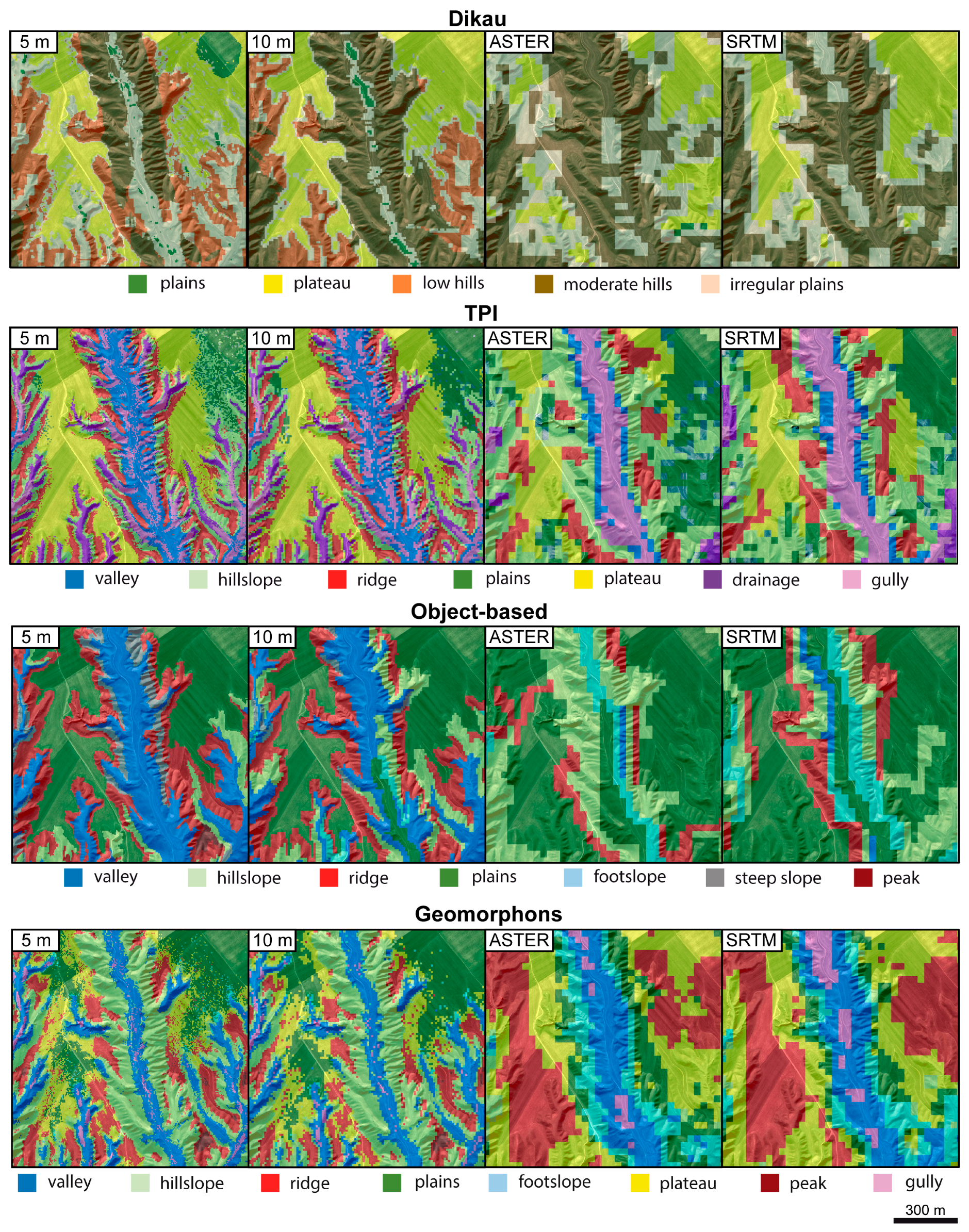
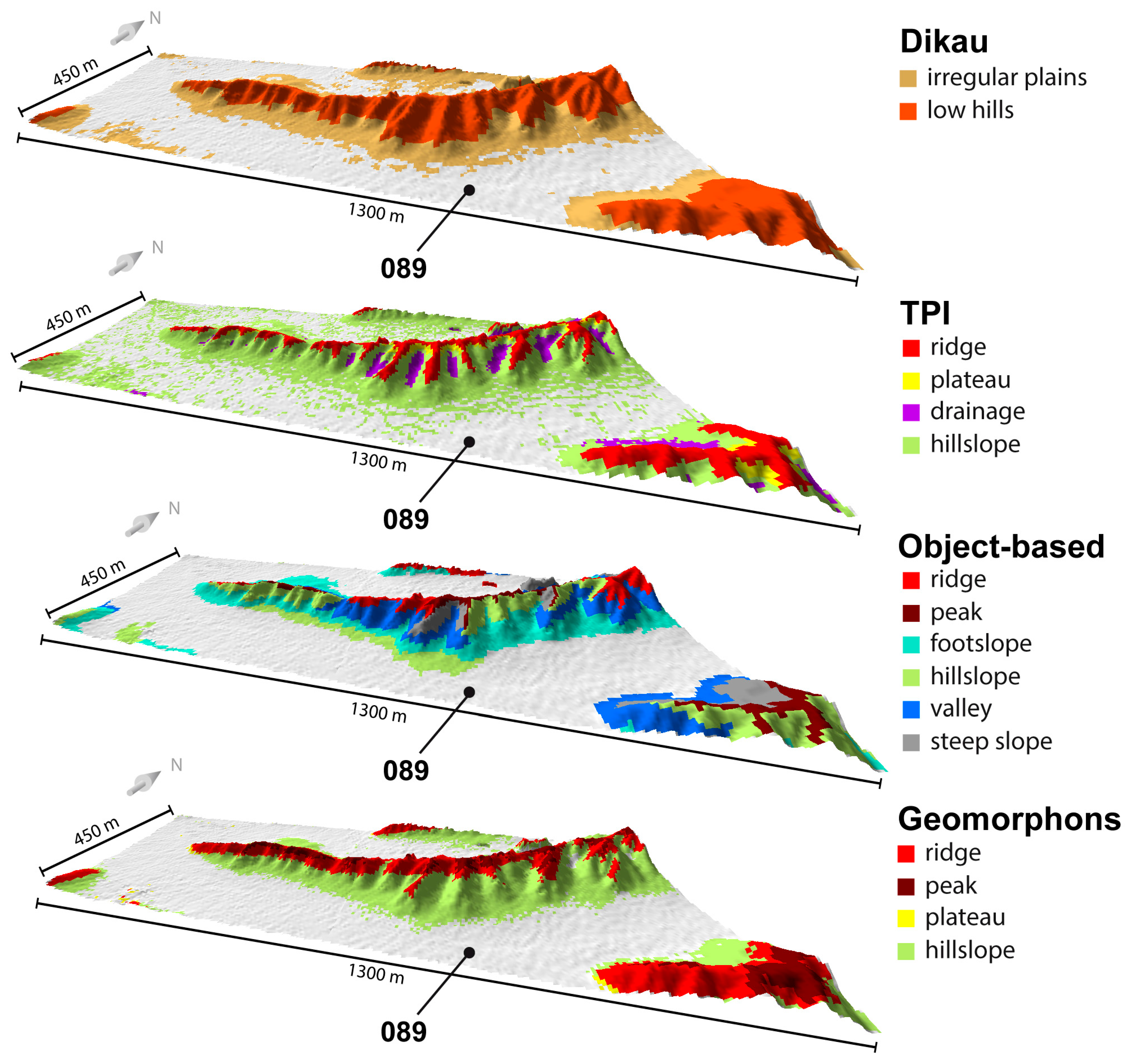
- Flat areas: With the highest spatial resolution DEM, the TPI approach yielded the weakest results for flat areas in both regions due to a very inhomogeneous classification with the classes plains and hillslope. The best results here can be observed by the object-based approach. Especially the segmentation technique leads to a very homogenous classification in wider areas. The geomorphons approach also produces relative homogenous results, but only in very large flat areas, as they exist in the Eastern study area. If the flat area is relatively small, the results demonstrate many misclassifications with the class footslope. Contrary to that, Dikau’s approach seems to be the best to classify small flat areas. Here the results of the Western study area show very homogenous and spatially accurate results, whereas in wider areas many mixtures with the class plateau can be observed.
- Valleys: All results reveal that small valleys only were classified with spatially high-resolution DEMs. With both 30 m terrain models only the most distinct valleys were detected by all classification methods. The approach of Dikau classifies them barely even with a pixel resolution of 10 m. Only with a pixel resolution of 5 m this approach is able to classify valleys with the landform class irregular plains. With lower pixel resolutions, this approach is hardly able to detect them. Generally, the results of the TPI have the most diversification in the classification of valleys, caused by the largest variety of classes to divide these landform elements. Therefore, the TPI is the only approach that can distinguish different valley types and assign them to different classes. An observable weakness of this approach is that valleys were classified too broadly and some areas of the neighboring hills were also classified as valleys (see Figure 4). It is also noticeable for this approach that both 30 m results classified the majority of valleys with the class gully, while they were assigned to the class valley in spatially high-resolution results. The weakness of too wide classified areas of the class valley can also be observed in the results of the object-based approach. Furthermore, the built segments seem to be spatially inaccurate in some places. In contrast, the most accurate classification of valley widths was achieved by the geomorphons approach with a high pixel resolution DEM. Furthermore, small incisions can be shown separately with the class gully by this approach. However, the general subdivision of different incision types is less differentiated than by the TPI.
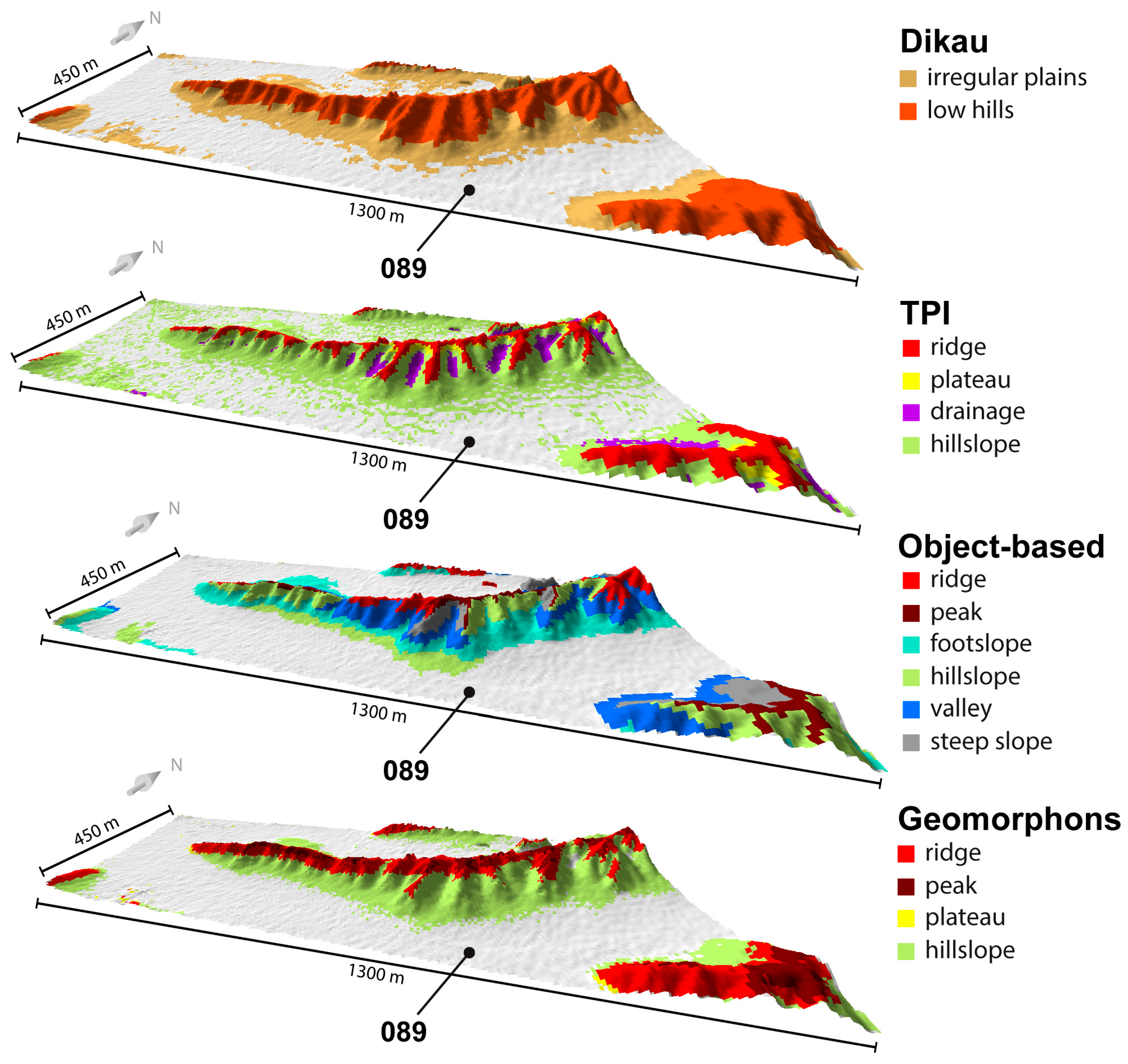
- Hills: A comparison of the classification results of hilly landforms indicates the least differentiation of the relief with Dikau’s approach, caused by the fact that it just classifies these areas with the classes low hills and moderate hills. Furthermore, the results of Dikau’s classification show a systematic change in the amount of classified landforms with the class low hills. Whereby with a pixel resolution of 5 m the lower hills of the western part of the plateau were assigned correctly as low hills, with both 30 m DEMs almost all hills were classified as moderate hills. All other approaches produce much more diversity in their results, because their classification scheme is able to subdivide the hills into smaller sub elements. Figure 5 depicts the classification schemes of the four approaches in spatially high-resolution on a typical range of hills in the western study area. In particular, the object-based approach has many suitable classes for a systematic classification of hills. However, the results reveal that the extremely fragmented structure of the hills is often not depicted accurate enough by the segments. Therefore, many classified landforms do not fit properly to the relief and overlap with areas, which should be better classified with another landform class. This leads to the effect that the classification result of the object-based approach seems to be coarser than the results of the TPI and geomorphons approach. A specific feature of the object-based approach is the differentiation between different slope gradients by the classes steep slope and hillslope. The results demonstrate that the subdivision works properly only with a spatially high-resolution DEM. It is observed that the amount of classified steep slope areas decreases strongly for lower pixel resolutions. With a geometric resolution of 30 m nearly no steep slope landforms were detected. The geomorphons approach generally classifies hills with the classes hillslope and the upper parts with the classes ridge and peak. Noticeable is that lower parts were not classified with the class footslope in the results with high pixel resolutions, although this class would be more suitable. A comparison of high and low resolution results reveals a changed system in the classification of hillsides. Whereas the slopes were assigned to the class hillslope in spatially high-resolution results, most areas were classified with the classes footslope and plateau with a low pixel resolution DEM. Furthermore, it is conspicuous that the classified landforms are much coarser with both 30 m DEMs.
4.3. Accuracy Assessment
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Data | |||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Classification | Landform Class | Plains | Plateau | Irregular Plains | Low Hills | Moderate Hills | Total | UA (%) | |||||||||||||||||||||
| 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | ||
| plains | 11 | 11 | 5 | 9 | 1 | 2 | 3 | 3 | 2 | 3 | 5 | 7 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 14 | 16 | 13 | 21 | 79 | 69 | 38 | 43 | |
| plateau | 3 | 3 | 0 | 0 | 4 | 3 | 2 | 2 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 7 | 7 | 2 | 4 | 57 | 43 | 100 | 50 | |
| irregular plains | 9 | 6 | 8 | 6 | 2 | 1 | 2 | 2 | 18 | 13 | 9 | 13 | 3 | 4 | 4 | 6 | 0 | 0 | 7 | 8 | 32 | 24 | 30 | 35 | 56 | 54 | 30 | 37 | |
| low hills | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 15 | 11 | 0 | 1 | 9 | 1 | 0 | 0 | 24 | 12 | 0 | 1 | 63 | 92 | - | 100 | |
| moderate hills | 1 | 1 | 5 | 2 | 0 | 2 | 2 | 1 | 3 | 9 | 12 | 5 | 4 | 8 | 16 | 13 | 16 | 18 | 16 | 16 | 24 | 38 | 51 | 37 | 67 | 47 | 31 | 43 | |
| Total | 24 | 21 | 18 | 17 | 7 | 8 | 9 | 8 | 23 | 26 | 26 | 25 | 22 | 23 | 20 | 23 | 25 | 19 | 23 | 25 | 101 | 97 | 96 | 98 | |||||
| PA (%) | 46 | 52 | 28 | 53 | 57 | 38 | 22 | 25 | 78 | 50 | 35 | 52 | 68 | 48 | 0 | 4 | 64 | 95 | 70 | 64 | |||||||||
| Reference Data | |||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Classification | Landform Class | Gully | Drainage | Valley | Plains | Hillslope | Plateau | Ridge | Total | UA (%) | |||||||||||||||||||||||||||
| 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | ||
| gully | 13 | 12 | 9 | 9 | 2 | 1 | 2 | 2 | 4 | 3 | 12 | 12 | 0 | 1 | 5 | 3 | 3 | 1 | 5 | 4 | 0 | 0 | 1 | 1 | 0 | 0 | 3 | 1 | 22 | 18 | 37 | 32 | 59 | 67 | 24 | 28 | |
| drainage | 1 | 1 | 1 | 1 | 9 | 8 | 1 | 1 | 1 | 0 | 2 | 1 | 1 | 0 | 2 | 3 | 4 | 3 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 16 | 12 | 8 | 7 | 56 | 67 | 13 | 14 | |
| valley | 3 | 2 | 2 | 2 | 0 | 0 | 0 | 0 | 13 | 12 | 2 | 2 | 10 | 8 | 2 | 6 | 6 | 8 | 3 | 3 | 0 | 0 | 0 | 0 | 2 | 1 | 3 | 4 | 34 | 31 | 12 | 17 | 38 | 39 | 17 | 12 | |
| plains | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 2 | 1 | 1 | 1 | 11 | 12 | 8 | 8 | 1 | 1 | 1 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 14 | 14 | 12 | 16 | 79 | 86 | 67 | 50 | |
| hillslope | 0 | 0 | 1 | 0 | 0 | 0 | 3 | 4 | 1 | 0 | 0 | 0 | 3 | 4 | 3 | 2 | 24 | 18 | 15 | 14 | 2 | 2 | 2 | 2 | 0 | 3 | 10 | 10 | 30 | 27 | 34 | 32 | 80 | 67 | 44 | 44 | |
| plateau | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 2 | 3 | 7 | 5 | 3 | 3 | 0 | 0 | 1 | 4 | 8 | 7 | 7 | 12 | 88 | 71 | 43 | 25 | |
| ridge | 0 | 0 | 0 | 0 | 0 | 0 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 2 | 2 | 0 | 1 | 1 | 1 | 47 | 38 | 23 | 21 | 48 | 39 | 30 | 26 | 98 | 97 | 77 | 81 | |
| Total | 17 | 15 | 14 | 13 | 11 | 9 | 10 | 11 | 21 | 16 | 17 | 16 | 25 | 25 | 21 | 22 | 40 | 33 | 30 | 30 | 9 | 8 | 7 | 7 | 49 | 42 | 41 | 43 | 172 | 148 | 140 | 142 | |||||
| PA (%) | 76 | 80 | 64 | 69 | 82 | 89 | 10 | 9 | 62 | 75 | 12 | 13 | 44 | 48 | 38 | 36 | 60 | 55 | 50 | 47 | 78 | 63 | 43 | 43 | 96 | 90 | 56 | 49 | |||||||||
| Reference Data | |||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Classification | Landform Class | Peak | Ridge | Steep Slope | Plains | Hillslope | Valley | Footslope | Total | UA (%) | |||||||||||||||||||||||||||
| 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | ||
| peak | 5 | 6 | 4 | 0 | 5 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10 | 10 | 5 | 0 | 50 | 60 | 80 | - | |
| ridge | 7 | 6 | 8 | 8 | 21 | 21 | 13 | 10 | 0 | 1 | 1 | 4 | 0 | 0 | 0 | 0 | 3 | 4 | 3 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 0 | 31 | 32 | 28 | 23 | 68 | 66 | 46 | 43 | |
| steep slope | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 6 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10 | 8 | 0 | 0 | 60 | 63 | - | - | |
| plains | 0 | 0 | 0 | 1 | 0 | 0 | 7 | 8 | 0 | 0 | 0 | 0 | 22 | 23 | 17 | 25 | 0 | 0 | 5 | 11 | 2 | 4 | 2 | 12 | 0 | 0 | 2 | 3 | 24 | 27 | 33 | 60 | 92 | 85 | 52 | 42 | |
| hillslope | 0 | 0 | 0 | 1 | 3 | 2 | 8 | 10 | 3 | 3 | 7 | 3 | 2 | 0 | 10 | 1 | 11 | 13 | 12 | 12 | 3 | 0 | 8 | 2 | 0 | 1 | 2 | 3 | 22 | 19 | 47 | 32 | 50 | 68 | 26 | 38 | |
| valley | 0 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 3 | 2 | 1 | 3 | 1 | 10 | 12 | 2 | 3 | 18 | 18 | 12 | 7 | 3 | 3 | 1 | 0 | 35 | 35 | 18 | 14 | 51 | 51 | 67 | 50 | |
| footslope | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 | 2 | 3 | 2 | 1 | 1 | 0 | 5 | 3 | 2 | 4 | 4 | 4 | 9 | 7 | 4 | 3 | 15 | 16 | 17 | 12 | 60 | 44 | 24 | 25 | |
| Total | 12 | 12 | 12 | 10 | 32 | 29 | 29 | 28 | 9 | 10 | 9 | 11 | 28 | 27 | 32 | 28 | 29 | 32 | 28 | 30 | 25 | 26 | 28 | 25 | 12 | 11 | 10 | 9 | 147 | 147 | 148 | 141 | |||||
| PA (%) | 42 | 50 | 33 | 0 | 66 | 72 | 45 | 36 | 67 | 50 | 0 | 0 | 79 | 85 | 53 | 89 | 38 | 41 | 43 | 40 | 72 | 69 | 43 | 28 | 75 | 64 | 40 | 33 | |||||||||
| Reference Data | |||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Classification | Landform Class | Plains | Peak | Ridge | Plateau | Hillslope | Footslope | Valley | Gully | Total | UA (%) | ||||||||||||||||||||||||||||||
| 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | 5 | 10 | A | S | ||
| plains | 9 | 7 | 4 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 2 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 9 | 7 | 7 | 11 | 100 | 100 | 57 | 45 | |
| peak | 0 | 0 | 0 | 0 | 8 | 8 | 1 | 1 | 6 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 14 | 15 | 2 | 1 | 57 | 53 | 50 | 100 | |
| ridge | 1 | 1 | 0 | 0 | 2 | 1 | 4 | 6 | 24 | 19 | 13 | 9 | 0 | 1 | 1 | 1 | 4 | 6 | 3 | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 31 | 28 | 23 | 18 | 77 | 68 | 57 | 50 | |
| plateau | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 3 | 8 | 3 | 2 | 3 | 1 | 0 | 0 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 3 | 2 | 15 | 16 | 100 | 100 | 20 | 6 | |
| hillslope | 4 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 3 | 3 | 3 | 2 | 2 | 0 | 0 | 1 | 23 | 20 | 5 | 9 | 2 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 34 | 30 | 10 | 12 | 68 | 67 | 50 | 75 | |
| footslope | 6 | 5 | 7 | 7 | 0 | 0 | 1 | 1 | 0 | 0 | 3 | 2 | 0 | 0 | 1 | 1 | 0 | 2 | 6 | 5 | 5 | 2 | 6 | 6 | 2 | 0 | 7 | 8 | 0 | 0 | 0 | 0 | 13 | 9 | 31 | 30 | 38 | 22 | 19 | 20 | |
| valley | 3 | 8 | 8 | 8 | 0 | 0 | 2 | 1 | 1 | 1 | 2 | 5 | 0 | 1 | 2 | 0 | 5 | 1 | 5 | 4 | 0 | 0 | 0 | 0 | 30 | 31 | 24 | 24 | 3 | 5 | 8 | 8 | 42 | 47 | 51 | 50 | 71 | 66 | 47 | 48 | |
| gully | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 6 | 3 | 4 | 3 | 12 | 9 | 1 | 0 | 18 | 12 | 7 | 4 | 67 | 75 | 14 | 0 | |
| Total | 23 | 24 | 20 | 21 | 10 | 9 | 9 | 9 | 34 | 30 | 26 | 27 | 5 | 4 | 7 | 5 | 32 | 29 | 29 | 29 | 7 | 5 | 7 | 6 | 38 | 35 | 39 | 37 | 15 | 14 | 9 | 8 | 164 | 150 | 146 | 142 | |||||
| PA (%) | 39 | 29 | 20 | 24 | 80 | 89 | 11 | 11 | 71 | 63 | 50 | 33 | 60 | 50 | 43 | 20 | 72 | 69 | 17 | 31 | 71 | 40 | 86 | 100 | 79 | 89 | 62 | 65 | 80 | 64 | 11 | 0 | |||||||||
References
- Pike, R.J.; Park, M. Geomorphometry—Progress, practice and prospect. Z. Geomorphol. 1995, 101, 221–235. [Google Scholar]
- Florinsky, I. Digital Terrain Analysis in Soil Science and Geology; Academic Press: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Behrens, T.; Zhu, A.X.; Schmidt, K.; Scholten, T. Multi-scale digital terrain analysis and feature selection for digital soil mapping. Geoderma 2010, 155, 175–185. [Google Scholar] [CrossRef]
- Behrens, T.; Schmidt, K.; Ramirez-Lopez, L.; Gallant, J.; Zhu, A.X.; Scholten, T. Hyper-scale digital soil mapping and soil formation analysis. Geoderma 2014, 213, 578–588. [Google Scholar] [CrossRef]
- Bishop, M.P.; James, L.A.; Shroder, J.F.; Walsh, S.J. Geospatial technologies and digital geomorphological mapping: Concepts, issues and research. Geomorphology 2012, 137, 5–26. [Google Scholar] [CrossRef]
- Armstrong, R.N.; Martz, L.W. Topographic parameterization in continental hydrology: A study in scale. Hydrol. Process. 2003, 17, 3763–3781. [Google Scholar] [CrossRef]
- Schwanghart, W.; Groom, G.; Kuhn, N.J.; Heckrath, G. Flow network derivation from a high resolution DEM in a low relief, agrarian landscape. Earth Surf. Process. Landf. 2013, 38, 1576–1586. [Google Scholar] [CrossRef]
- Barka, I.; Vladovic, J.; Máli, Š. Landform Classification and Its Application in Predictive Mapping of Soil and Forest Units. In Proceedings of the GIS Ostrava, Ostrava, Czech Republic, 24–26 January 2011; p. 11. [Google Scholar]
- Wood, S.W.; Murphy, B.P.; Bowman, D.M.J.S. Firescape ecology: How topography determines the contrasting distribution of fire and rain forest in the south-west of the Tasmanian Wilderness World Heritage Area. J. Biogeogr. 2011, 38, 1807–1820. [Google Scholar] [CrossRef]
- Pennock, D.J.; Zebarth, B.J.; De Jong, E. Landform classification and soil distribution in hummocky terrain, Saskatchewan, Canada. Geoderma 1987, 40, 297–315. [Google Scholar] [CrossRef]
- Dikau, R.; Brabb, E.; Mark, R.K.; Pike, R.J. Morphometric landform analysis of New Mexico. Z. Geomorphol. Suppl. 1995, 101, 109–126. [Google Scholar]
- Hammond, E.H. Small-Scale Continental Landform Maps. Ann. Assoc. Am. Geogr. 1954, 44, 33–42. [Google Scholar] [CrossRef]
- Hammond, E.H. Analysis of Properties in Land Form Geography: An Application to Broad-Scale Land Form Mapping. Ann. Assoc. Am. Geogr. 1964, 54, 11–19. [Google Scholar] [CrossRef]
- Brabyn, L. GIS Analysis of Macro Landform. In Proceedings of the 10th Colloquium of the Spatial Information Research Centre, Dunedin, New Zealand, 16–19 November 1998; pp. 35–48. [Google Scholar]
- MacMillan, R.A.; Pettapiece, W.W.; Nolan, S.C.; Goddard, T.W. A generic procedure for automatically segmenting landforms into landform elements using DEMs, heuristic rules and fuzzy logic. Fuzzy Sets Syst. 2000, 113, 81–109. [Google Scholar] [CrossRef]
- Iwahashi, J.; Pike, R.J. Automated classifications of topography from DEMs by an unsupervised nested-means algorithm and a three-part geometric signature. Geomorphology 2007, 86, 409–440. [Google Scholar] [CrossRef]
- Klingseisen, B.; Metternicht, G.; Paulus, G. Geomorphometric landscape analysis using a semi-automated GIS-approach. Environ. Model. Softw. 2008, 23, 109–121. [Google Scholar] [CrossRef]
- Burrough, P.A.; Van Gaans, P.F.M.; MacMillan, R.A. High-resolution landform classification using fuzzy k-means. Fuzzy Sets Syst. 2000, 113, 37–52. [Google Scholar] [CrossRef]
- Schmidt, J.; Hewitt, A. Fuzzy land element classification from DTMs based on geometry and terrain position. Geoderma 2004, 121, 243–256. [Google Scholar] [CrossRef]
- Weiss, A.D. Topographic position and landforms analysis. In Proceedings of the ESRI User Conference, San Diego, CA, USA, 9–13 July 2001. [Google Scholar]
- De Reu, J.; Bourgeois, J.; Bats, M.; Zwertvaegher, A.; Gelorini, V.; De Smedt, P.; Chu, W.; Antrop, M.; De Maeyer, P.; Finke, P.; et al. Application of the topographic position index to heterogeneous landscapes. Geomorphology 2013, 186, 39–49. [Google Scholar] [CrossRef]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons—A pattern recognition approach to classification and mapping of landforms. Geomorphology 2013, 182, 147–156. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Blaschke, T. Automated classification of landform elements using object-based image analysis. Geomorphology 2006, 81, 330–344. [Google Scholar] [CrossRef]
- Pedersen, G.B.M. Semi-automatic classification of glaciovolcanic landforms: An object-based mapping approach based on geomorphometry. J. Volcanol. Geotherm. Res. 2016, 311, 29–40. [Google Scholar] [CrossRef]
- Van Asselen, S.; Seijmonsbergen, A.C. Expert-driven semi-automated geomorphological mapping for a mountainous area using a laser DTM. Geomorphology 2006, 78, 309–320. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Eisank, C.; Drǎgut, L.; Blaschke, T. An object-based workflow to extract landforms at multiple scales from two distinct data types. IEEE Geosci. Remote Sens. Lett. 2013, 10, 947–951. [Google Scholar] [CrossRef]
- Schneevoigt, N.J.; van der Linden, S.; Thamm, H.P.; Schrott, L. Detecting Alpine landforms from remotely sensed imagery. A pilot study in the Bavarian Alps. Geomorphology 2008, 93, 104–119. [Google Scholar] [CrossRef]
- Drǎguţ, L.; Eisank, C. Automated object-based classification of topography from SRTM data. Geomorphology 2012, 141–142, 21–33. [Google Scholar] [CrossRef] [PubMed]
- Dekavalla, M.; Argialas, D. Object-based classification of global undersea topography and geomorphological features from the SRTM30_PLUS data. Geomorphology 2017, 288, 66–82. [Google Scholar] [CrossRef]
- Camiz, S.; Poscolieri, M.; Roverato, M. Geomorphometric comparative analysis of Latin-American volcanoes. J. South Am. Earth Sci. 2017, 76, 47–62. [Google Scholar] [CrossRef]
- Deng, Y.; Wilson, J.P.; Bauer, B.O. DEM resolution dependencies of terrain attributes across a landscape. Int. J. Geogr. Inf. Sci. 2007, 21, 187–213. [Google Scholar] [CrossRef]
- Zhang, W.; Montgomery, D.R. Digital elevation model grid size, landscape representation, and hydrologic simulations. Water Resour. Res. 1994, 30, 1019–1028. [Google Scholar] [CrossRef]
- Kienzle, S. The Effect of DEM Raster Resolution on First Order, Second Order and Compound Terrain Derivatives. Trans. GIS 2004, 8, 83–111. [Google Scholar] [CrossRef]
- Zink, M.; Bachmann, M.; Brautigam, B.; Fritz, T.; Hajnsek, I.; Moreira, A.; Wessel, B.; Krieger, G. TanDEM-X: The New Global DEM Takes Shape. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–23. [Google Scholar] [CrossRef]
- Frechen, M.; Kehl, M.; Rolf, C.; Sarvati, R.; Skowronek, A. Loess chronology of the Caspian Lowland in Northern Iran. Quat. Int. 2009, 198, 220–233. [Google Scholar] [CrossRef]
- Khormali, F.; Kehl, M. Micromorphology and development of loess-derived surface and buried soils along a precipitation gradient in Northern Iran. Quat. Int. 2011, 234, 109–123. [Google Scholar] [CrossRef]
- Lauer, T.; Vlaminck, S.; Frechen, M.; Rolf, C.; Kehl, M.; Shari, J.; Lehndorff, E.; Khormali, F. The Agh Band loess-palaeosol sequence—A terrestrial archive for climatic shifts during the last and penultimate glacial–interglacial cycles in a semiarid region in Northern Iran. Quat. Int. 2017, 429, 13–30. [Google Scholar] [CrossRef]
- Kehl, M. Quaternary Loesses, Loess-Like Sediments, Soils and Climate Change in Iran; Gebrüder Borntraeger Verlagsbuchhandlung: Stuttgart, Germany, 2010. [Google Scholar]
- Bretis, B.; Grasemann, B.; Conradi, F. An active fault zone in the Western Kopeh Dagh (Iran). Austrian J. Earth Sci. 2012, 105, 95–107. [Google Scholar]
- Abrams, M. The Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER): Data products for the high spatial resolution imager on NASA’s Terra platform. Int. J. Remote Sens. 2000, 21, 847–859. [Google Scholar] [CrossRef]
- Hirano, A.; Welch, R.; Lang, H. Mapping from ASTER stereo image data: DEM validation and accuracy assessment. ISPRS J. Photogramm. Remote Sens. 2003, 57, 356–370. [Google Scholar] [CrossRef]
- Tachikawa, T.; Kaku, M.; Iwasaki, A.; Gesch, D.B.; Oimoen, M.J.; Zhang, Z.; Danielson, J.J.; Krieger, T.; Curtis, B.; Haase, J.; et al. ASTER Global Digital Elevation Model Version 2—Summary of Validation Results, 2nd ed.; NASA: Washington, DC, USA, 2011.
- Abrams, M.; Tsu, H.; Hulley, G.; Iwao, K.; Pieri, D.; Cudahy, T.; Kargel, J. The Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER) after fifteen years: Review of global products. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 292–301. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Astrium GEO-Information Services. Pléiades Imagery User Guide V 2.0; Astrium: Paris, France, 2012. [Google Scholar]
- De Lussy, F.; Kubik, P.; Greslou, D.; Pascal, V.; Gigord, P.; Cantou, J.P. Pleiades-HR image system products and quality Pleiades-HR image system products and geometric accuracy. In Proceedings of the ISPRS Hannover Workshop, Hannover, Germany, 17–20 May 2005. [Google Scholar]
- Gleyzes, M.A.; Perret, L.; Kubik, P. Pleiades system architecture and main performances. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 537–542. [Google Scholar] [CrossRef]
- Yokoyama, R.; Shlrasawa, M.; Pike, R.J. Visualizing Topography by Openness: A New Application of Image Processing to Digital Elevation Models. Photogramm. Eng. Remote Sens. 2002, 68, 257–265. [Google Scholar]
- Gallant, A.L.; Brown, D.D.; Hoffer, R.M. Automated mapping of Hammond’s landforms. IEEE Geosci. Remote Sens. Lett. 2005, 2, 384–388. [Google Scholar] [CrossRef]
- Hrvatin, M.; Perko, D. Suitability of Hammond’s Method for Determining Landform Units in Slovenia. Acta Geogr. Slov. 2009, 49, 343–366. [Google Scholar] [CrossRef]
- Martins, F.M.G.; Fernandez, H.M.; Isidoro, J.M.G.P.; Jordán, A.; Zavala, L. Classification of landforms in Southern Portugal (Ria Formosa Basin). J. Maps 2016, 12, 422–430. [Google Scholar] [CrossRef]
- Mashimbye, Z.E.; De Clercq, W.P.; Van Niekerk, A. An evaluation of digital elevation models (DEMs) for delineating land components. Geoderma 2014, 213, 312–319. [Google Scholar] [CrossRef]
- Rexer, M.; Hirt, C. Comparison of free high resolution digital elevation data sets (ASTER GDEM2, SRTM v2.1/v4.1) and validation against accurate heights from the Australian National Gravity Database. Aust. J. Earth Sci. 2014, 61, 213–226. [Google Scholar] [CrossRef]
- Thomas, J.; Joseph, S.; Thrivikramji, K.P.; Arunkumar, K.S. Sensitivity of digital elevation models: The scenario from two tropical mountain river basins of the Western Ghats, India. Geosci. Front. 2014, 5, 893–909. [Google Scholar] [CrossRef]
- Libohova, Z.; Winzeler, H.E.; Lee, B.; Schoeneberger, P.J.; Datta, J.; Owens, P.R. Geomorphons: Landform and property predictions in a glacial moraine in Indiana landscapes. Catena 2016, 142, 66–76. [Google Scholar] [CrossRef]
- Saadat, H.; Bonnell, R.; Sharifi, F.; Mehuys, G.; Namdar, M.; Ale-Ebrahim, S. Landform classification from a digital elevation model and satellite imagery. Geomorphology 2008, 100, 453–464. [Google Scholar] [CrossRef]
- Vannametee, E.; Babel, L.V.; Hendriks, M.R.; Schuur, J.; de Jong, S.M.; Bierkens, M.F.P.; Karssenberg, D. Semi-automated mapping of landforms using multiple point geostatistics. Geomorphology 2014, 221, 298–319. [Google Scholar] [CrossRef]
- Evans, I.S. Geomorphometry and landform mapping: What is a landform? Geomorphology 2012, 137, 94–106. [Google Scholar] [CrossRef]

| Moving Window | 5 m | 10 m | 30 m |
|---|---|---|---|
| Slope gradient (rectangle) | 3 × 3 (15 m) | 3 × 3 (30 m) | 3 × 3 (90 m) |
| Local relief window (circle radius) | 15 (75 m) | 10 (100 m) | 5 (150 m) |
| Profile type (rectangle) | 10 × 10 (50 m) | 10 × 10 (100 m) | 10 × 10 (300 m) |
| Landform Sub-Classes Code | Landform Type |
|---|---|
| 111, 112, 121, 122, 131, 132, 141, 142, 151, 152, 161, 162, 211, 212, 221, 222 | Plains |
| 113, 114, 123, 124, 133, 134, 143, 144, 153, 154, 163, 164, 213, 214, 223, 224 | Plateau |
| 231, 232, 233, 234, 241, 242, 243, 244, 251, 252, 253, 254, 261, 262, 263, 264, 311, 312, 313, 314, 321, 322, 323, 324, 331, 332, 333, 334, 341, 342, 343, 344, 351, 352, 353, 354, 361, 362, 363, 364 | Irregular Plains |
| 411, 412, 413, 414, 421, 422, 423, 424 | Low Hills |
| 431, 432, 433, 434, 441, 442, 443, 444, 451, 452, 453, 454, 461, 462, 463, 464 | Moderate Hills |
| 5 m | 10 m | 30 m | ||||
|---|---|---|---|---|---|---|
| Inner Radius | Outer Radius | Inner Radius | Outer Radius | Inner Radius | Outer Radius | |
| TPI 300 | 5 (25 m) | 10 (50 m) | 3 (30 m) | 5 (50 m) | 3 (90 m) | 5 (150 m) |
| annulus | ||||||
| TPI 2000 | 62 (310 m) | 67 (335 m) | 30 (300 m) | 33 (330 m) | 10 (300 m) | 12 (360 m) |
| annulus | ||||||
| Parameters | 5 m | 10 m | 30 m |
|---|---|---|---|
| Outer search radius (px) | 20 (100 m) | 10 (100 m) | 10 (300 m) |
| Inner search radius (px) | 10 (50 m) | 5 (50 m) | 5 (150 m) |
| Flatness threshold (degrees) | 3 | 3 | 3 |
| Geomorphons Class Names | Used Class Names |
|---|---|
| flat | plains |
| peak | peak |
| ridge | ridge |
| shoulder | plateau |
| spur, slope, hollow | hillslope |
| pit | gully |
| valley | valley |
| footslope | footslope |
| West [m] | East [m] | |
|---|---|---|
| Pléiades | 11.7 | 3.2 |
| ASTER | 13.3 | 4.5 |
| SRTM | 9 | 2.9 |
| 5 m | 10 m | Aster 30 m | SRTM 30 m | |
|---|---|---|---|---|
| Dikau | 63% | 58% | 33% | 42% |
| TPI | 72% | 71% | 44% | 41% |
| Object-based | 63% | 63% | 42% | 40% |
| Geomorphons | 70% | 65% | 39% | 39% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kramm, T.; Hoffmeister, D.; Curdt, C.; Maleki, S.; Khormali, F.; Kehl, M. Accuracy Assessment of Landform Classification Approaches on Different Spatial Scales for the Iranian Loess Plateau. ISPRS Int. J. Geo-Inf. 2017, 6, 366. https://doi.org/10.3390/ijgi6110366
Kramm T, Hoffmeister D, Curdt C, Maleki S, Khormali F, Kehl M. Accuracy Assessment of Landform Classification Approaches on Different Spatial Scales for the Iranian Loess Plateau. ISPRS International Journal of Geo-Information. 2017; 6(11):366. https://doi.org/10.3390/ijgi6110366
Chicago/Turabian StyleKramm, Tanja, Dirk Hoffmeister, Constanze Curdt, Sedigheh Maleki, Farhad Khormali, and Martin Kehl. 2017. "Accuracy Assessment of Landform Classification Approaches on Different Spatial Scales for the Iranian Loess Plateau" ISPRS International Journal of Geo-Information 6, no. 11: 366. https://doi.org/10.3390/ijgi6110366