A Geospatial Application Framework for Directional Relations



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background Information
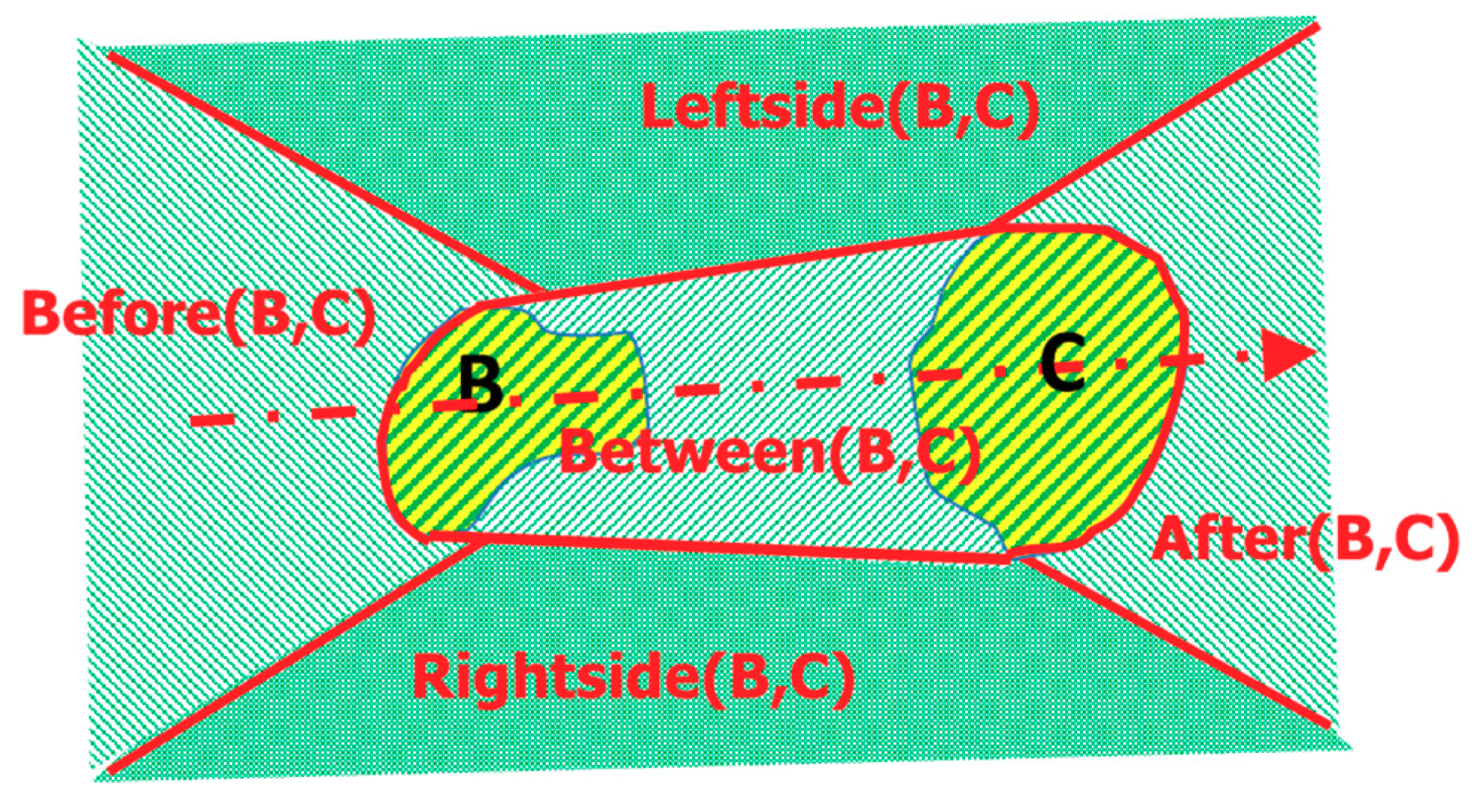
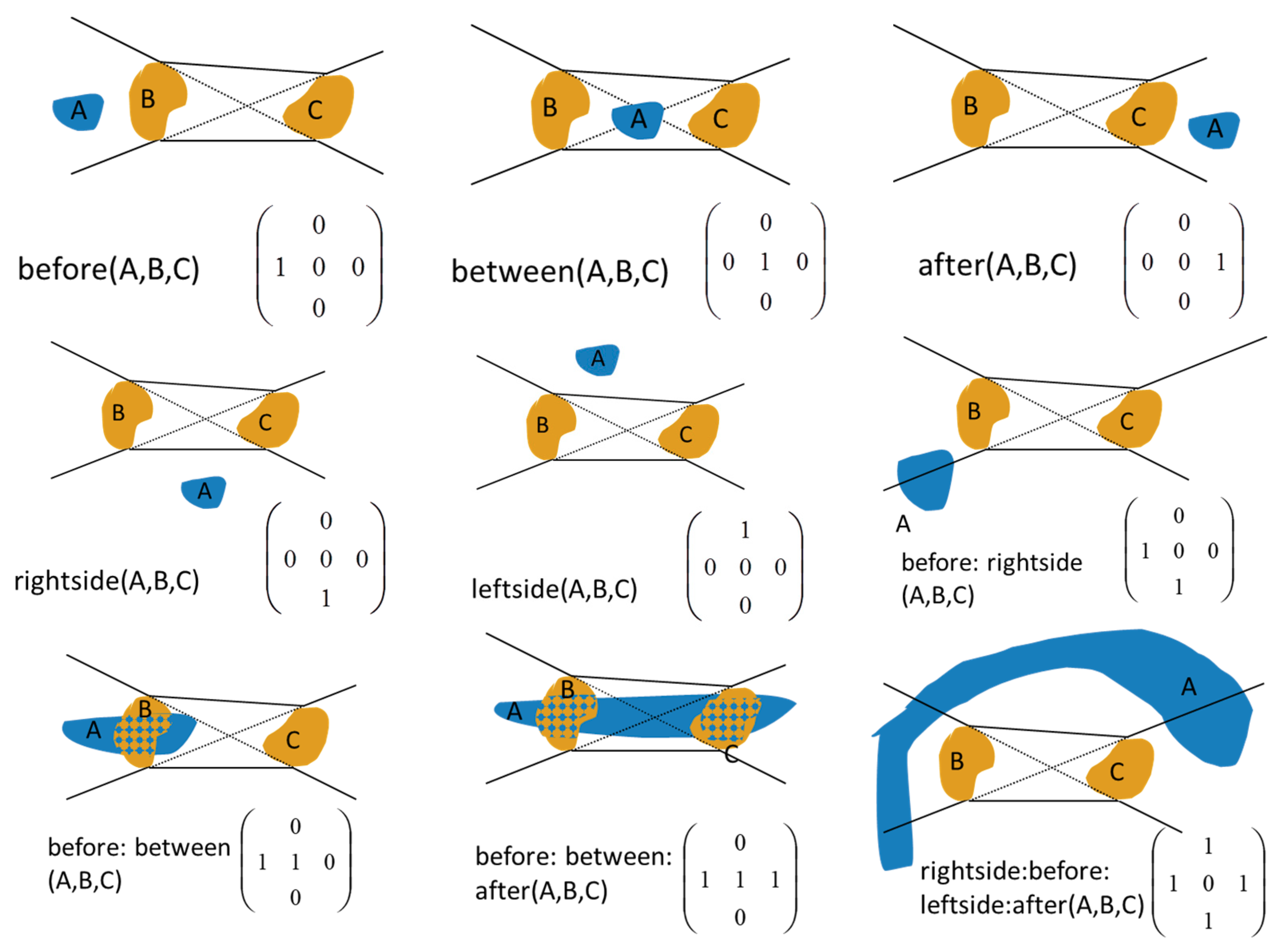
2.1. The 5-Intersection Model
| ALeftside(B,C) | ||
| ABefore(B,C) | ABetween(B,C) | AAfter(B,C) |
| ARightside(B,C) |
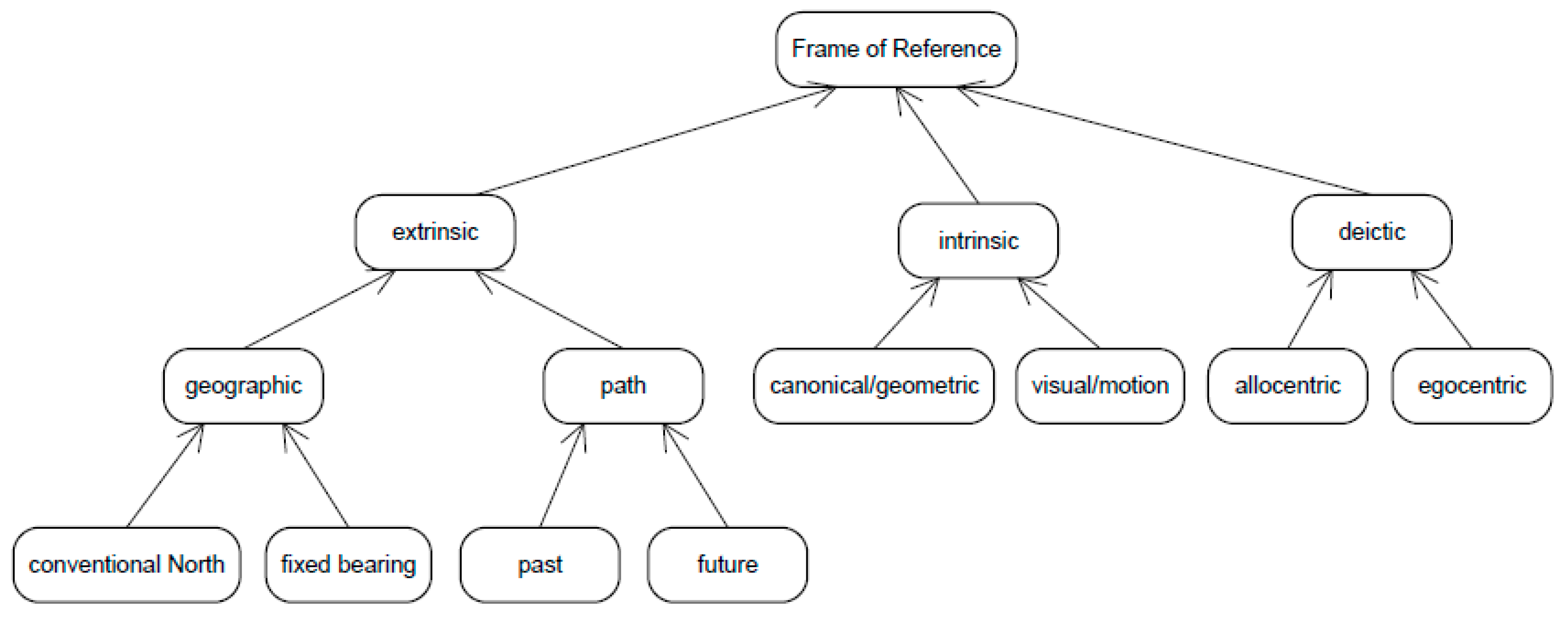
2.2. Frames of Reference
| r | |
| North_of | between |
| East_of | rightside |
| South_of | before |
| West_of | leftside |
| after | |
- SELECT c1.name FROM country AS c1, country AS c2
- WHERE c2.name = “Algeria” AND south_of(c1.the_geom, c2.the_geom);
| r | r′ |
| inside | between |
| rightside | rightside |
| back | before |
| leftside | leftside |
| front | after |
- SELECT b1.id FROM building AS b1, building AS b2
- WHERE b2.name = “my house” AND front(b1.the_geom,b2.the_geom) AND near(b1.the_geom, b2.the_geom);
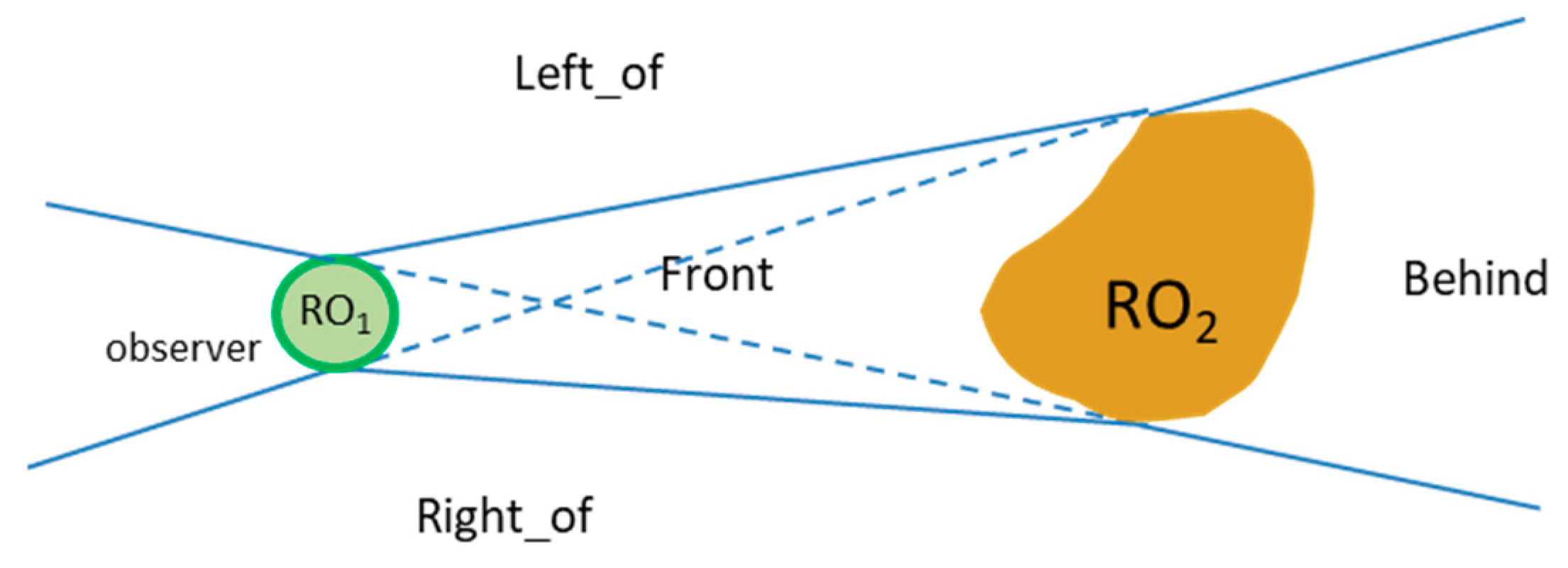
| r | r′ |
| front | between |
| right_of | rightside |
| left_of | leftside |
| behind | after |
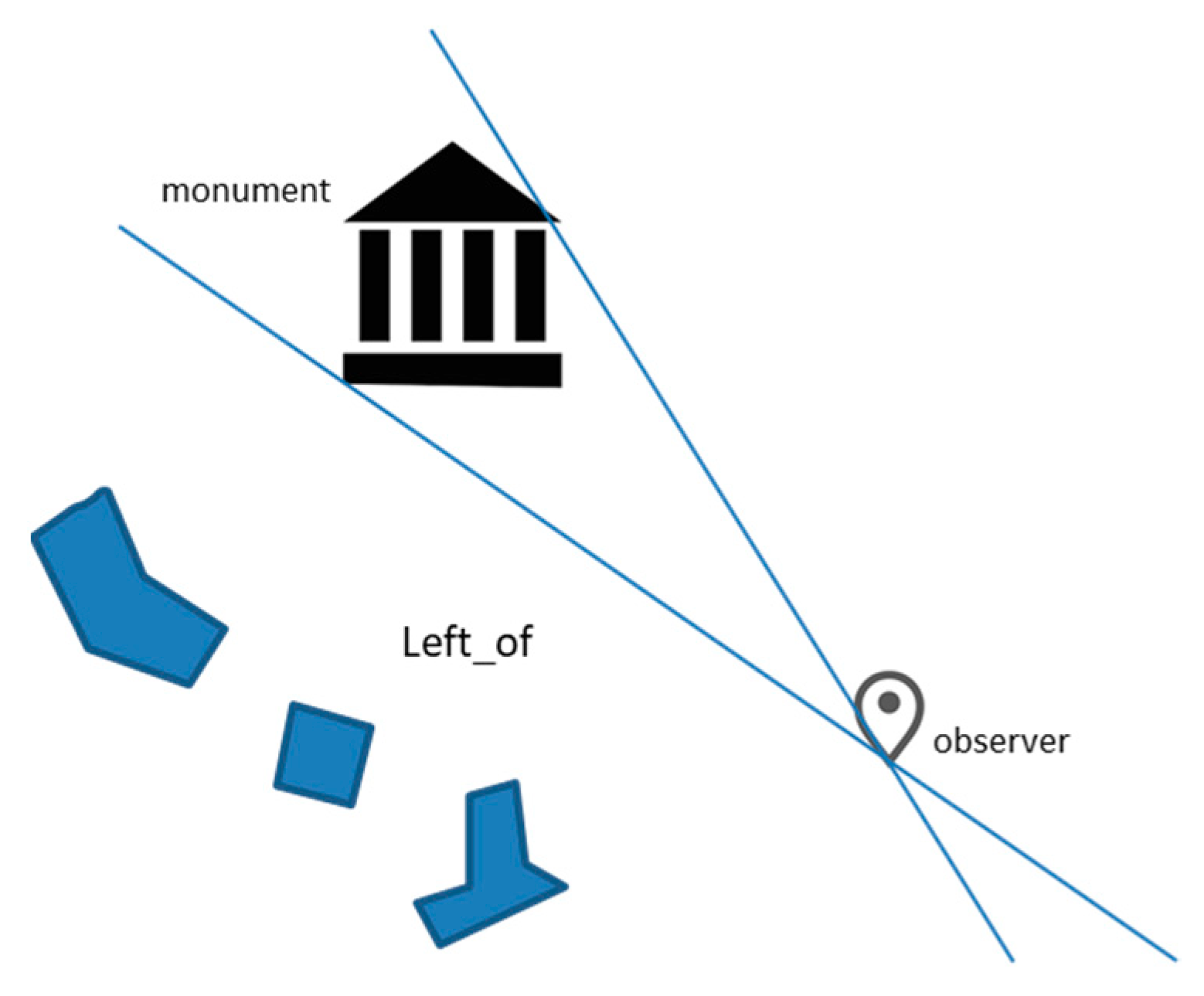
- SELECT a.id FROM building AS b, building AS a
- WHERE b.name = “monument” AND leftside(a.the_geom,b.the_geom);
3. Application Framework
3.1. Requirements
- The method Fi that implements the function described in Section 2.2, which translates a directional relation into a 5-intersection relation.
- A first method relate able to check whether a directional relation between two objects is verified or not. Possibly, also multiple relations could be verified (e.g., behind:left_of). For example, a query could have the form: “Is the tree on the left or behind the university building?”boolean test_rel = fr_of_ref.relate(tree, university, after:left_of)Alternatively, the relation could also be specified with a binary pattern using appropriate methods patt2rel and rel2patt, which would guarantee a translation from a binary string to the relation and vice versa. For example:boolean test_rel = fr_of_ref.relate(tree, university, “00011”)
- A second method relate able to return all objects that are in some relation with a given object. This function can be used to search for objects from a data store, filtering them so that they verify the relation expressed in the query.
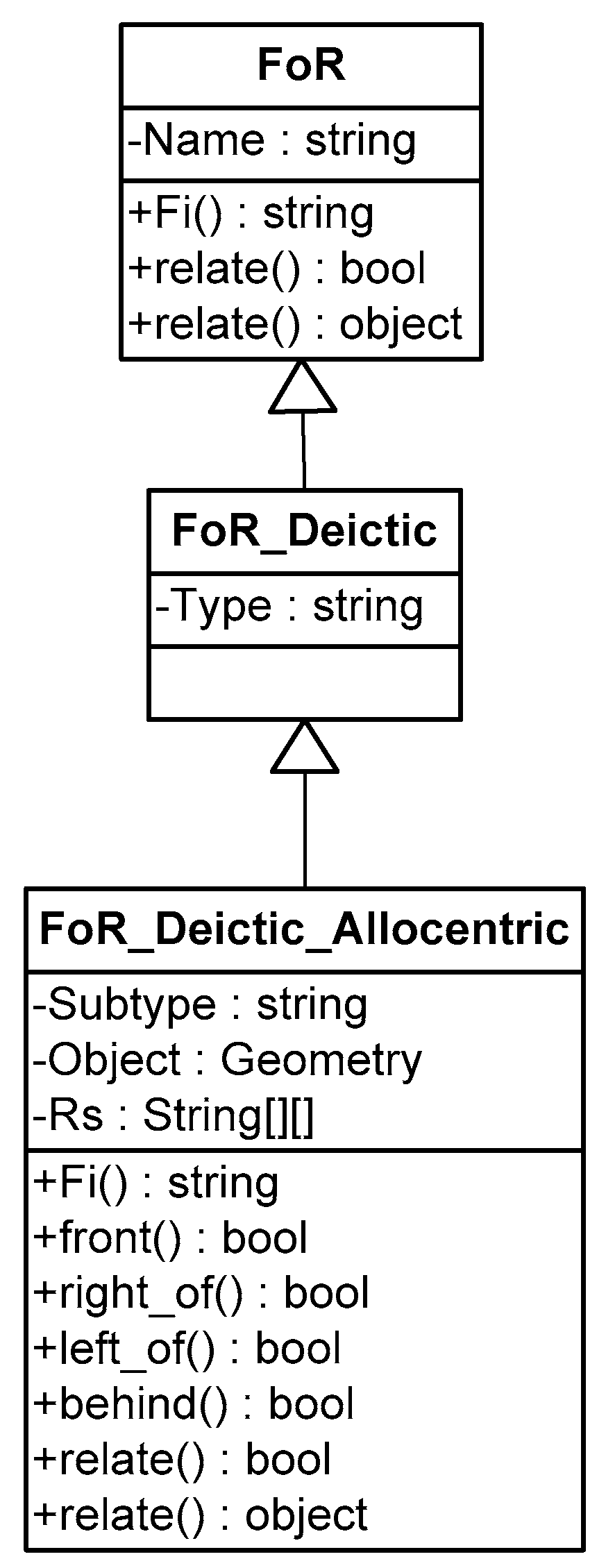
- the Subtype of the frame of reference;
- a geometric object Object, which is of different meaning depending on the frame of reference (basically, the third object of the ternary relation that is not explicit in the binary relation);
- a set Rs of all possible relations that can be used with the frame of reference. Each relation can be completely defined in terms of a pattern: Rs is an array of two-dimensional strings containing the relation name and its pattern. For example, for the deictic-allocentric frame of reference, Rs will be the following:
- Rs = new String [5][2];
- Rs[0] [0] = “10000”;
- Rs[0] [1] = “front”;
- Rs[1] [0] = “01000”;
- Rs[1] [1] = “right_of”;
- Rs[3] [0] = “00010”;
- Rs[3] [1] = “left_of”;
- Rs[4] [0] = “00001”;
- Rs[4] [1] = “behind”;
Note that in this frame of reference, one relation of the 5-intersection model (corresponding to the before relation (or “00100”) is not used. - The transformation function Fi, which for the deictic-allocentric frame of reference corresponds to the function described in Section 2.2;
- A set of Boolean functions that can compute the individual relations defined on the frame of reference. These relations are binary, i.e., they operate between two objects by accessing their geometric representation. Let us consider the following example: “Is the tree to the left of the university, with respect to the viewpoint of an observer?”. To verify this type of request, the function to be invoked is left_of, which is a method of the class FoR_Deictic_Allocentric. The call to this method is as follows:boolean test_rel = fr_of_ref.left_of(tree,university)
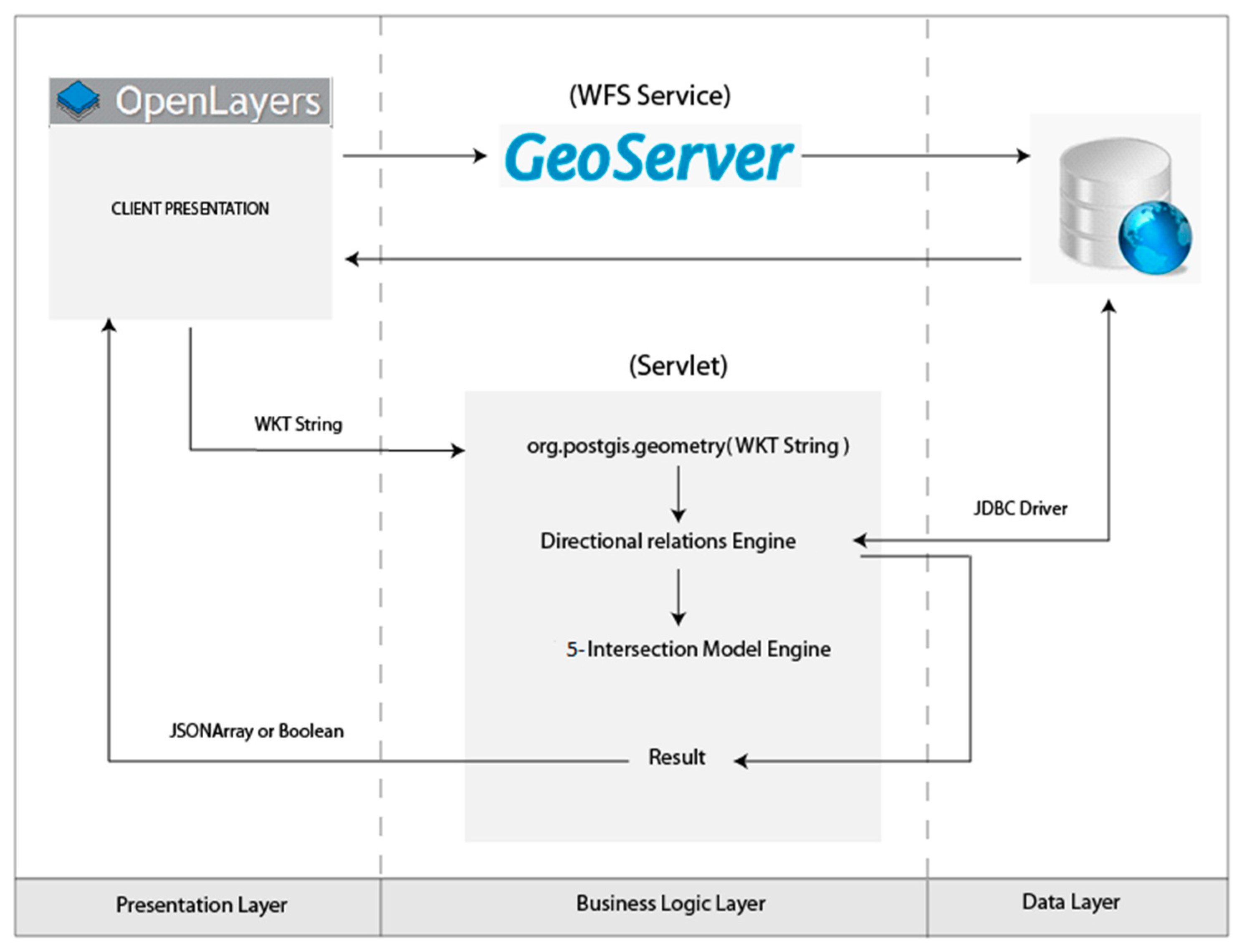
3.2. Architecture of the Framework
3.2.1. The Presentation Layer
- var protocol = new OpenLayers.Protocol.WFS({
- version: "1.1.0",
- srsName: "EPSG:4326",
- featureType: "feature_name",
- geometryName: "the_geom”
- })
- var vecLayer =
- new OpenLayers.Layer.Vector(“Layer_name”,{isBaseLayer: true});
3.2.2. The Business Logic Layer
- FoR_Extrinsic_geographic_conventional_north geo_fr =
- new FoR_Extrinsic_geographic_conventional_north (“Test”, “Extrinsic”, “Geographic”, “conventional_north”, North.getNorth(cStr));
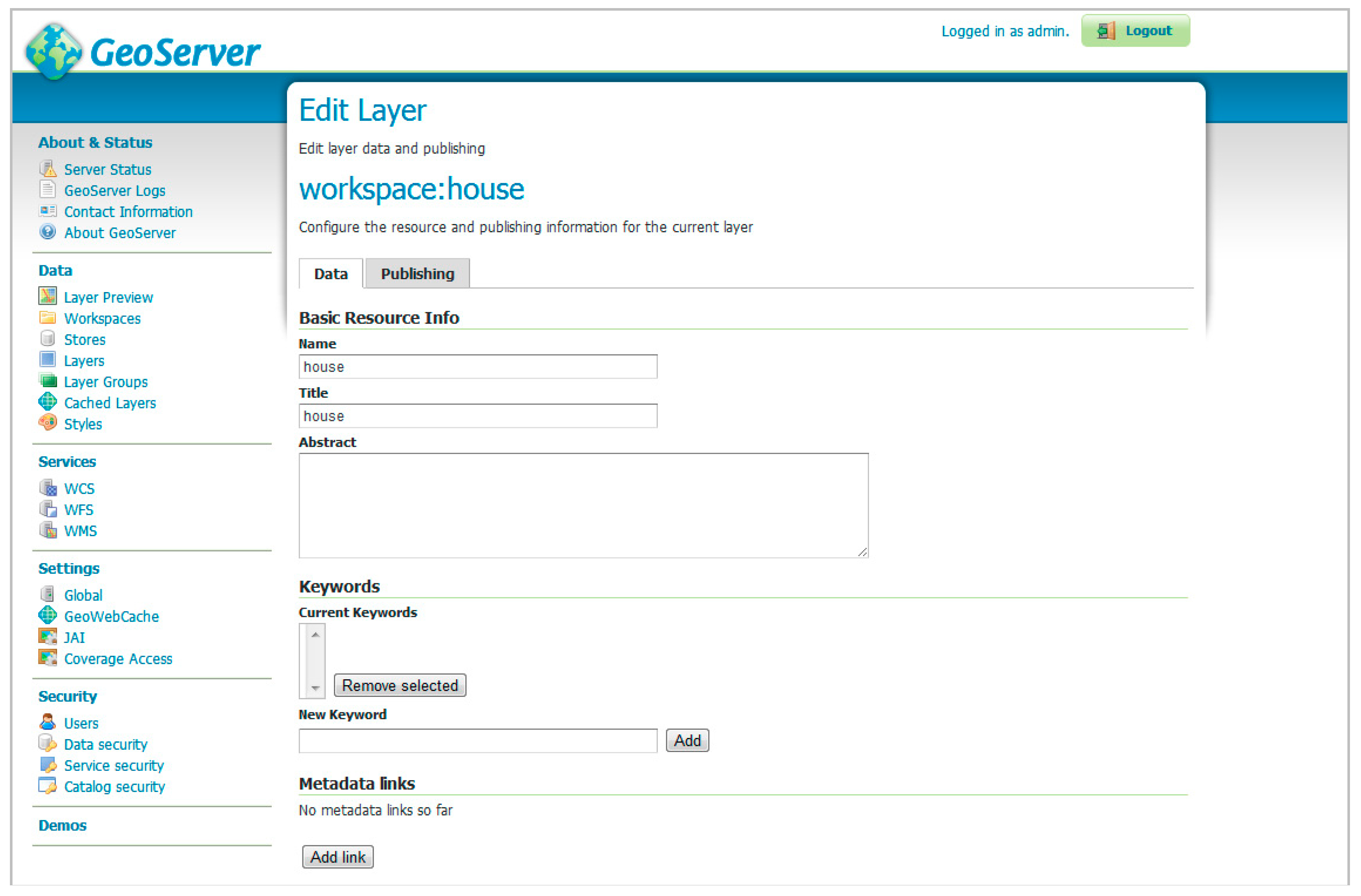
3.2.3. The Data Layer
4. Evaluation of the Application Framework
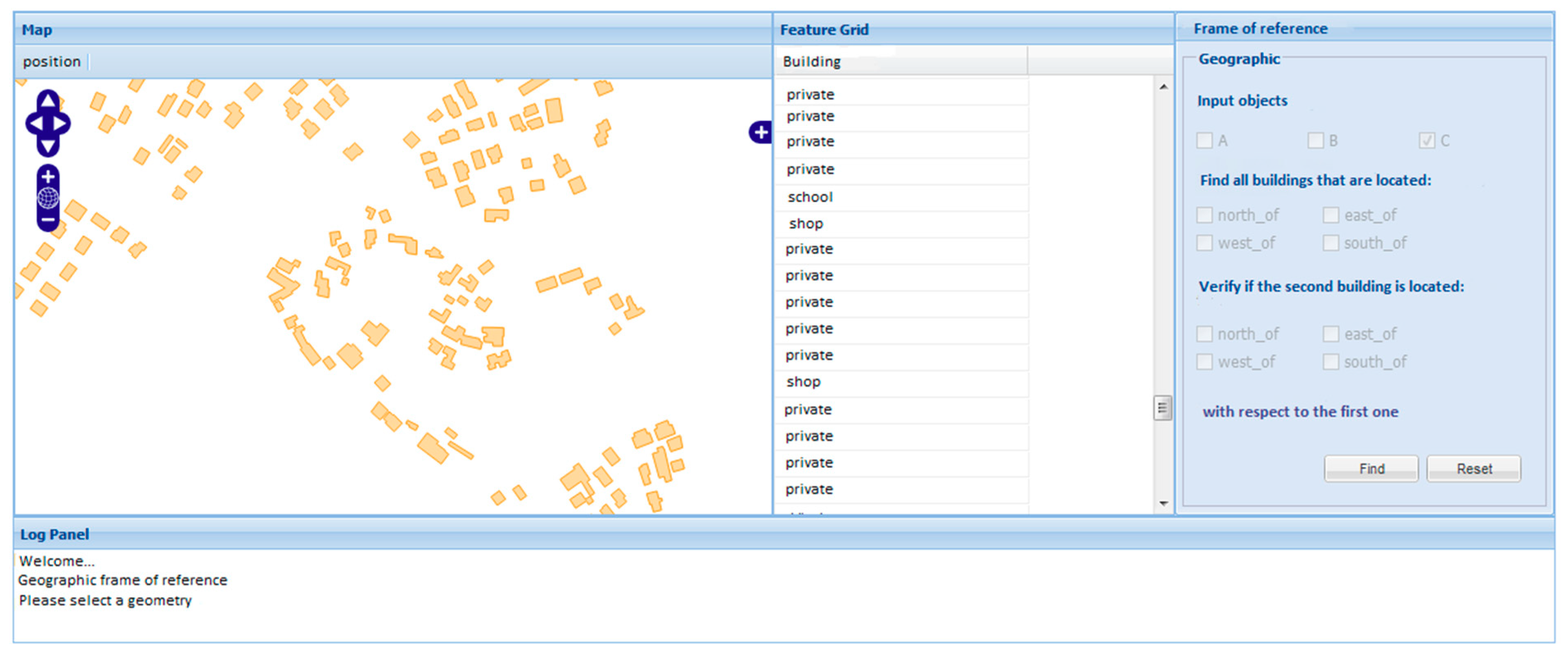
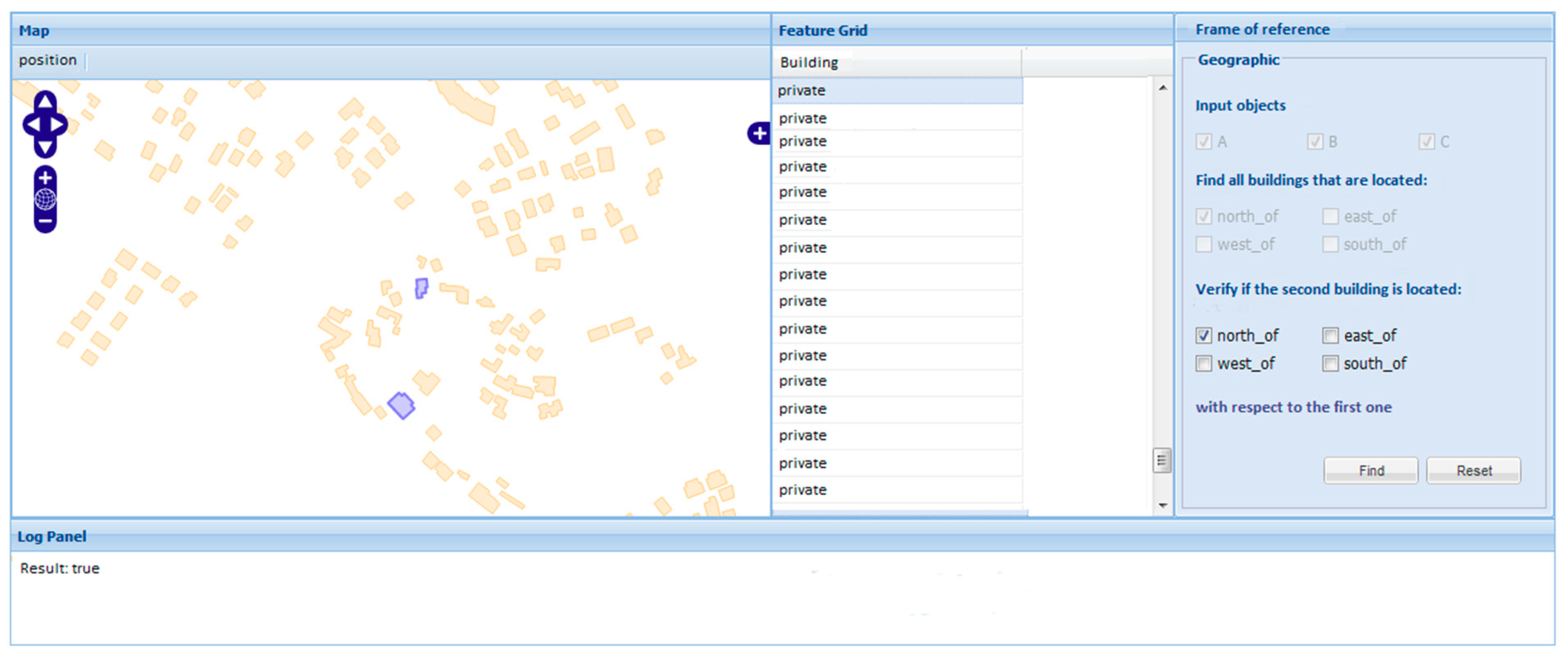
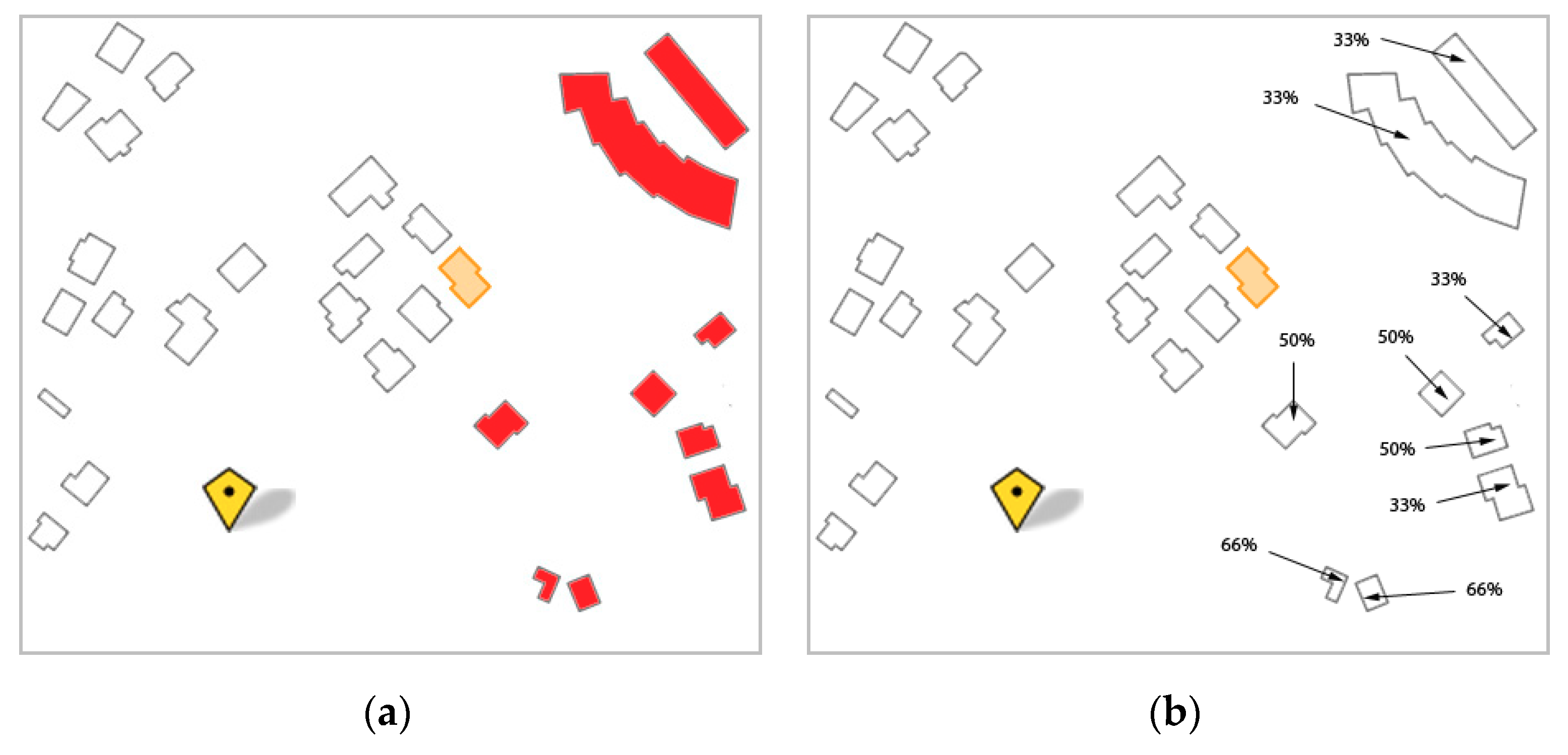
- Boolean Geographic: with this request it is possible to check whether a house is located to the north, south, west, east of another house. The result is a Boolean value.
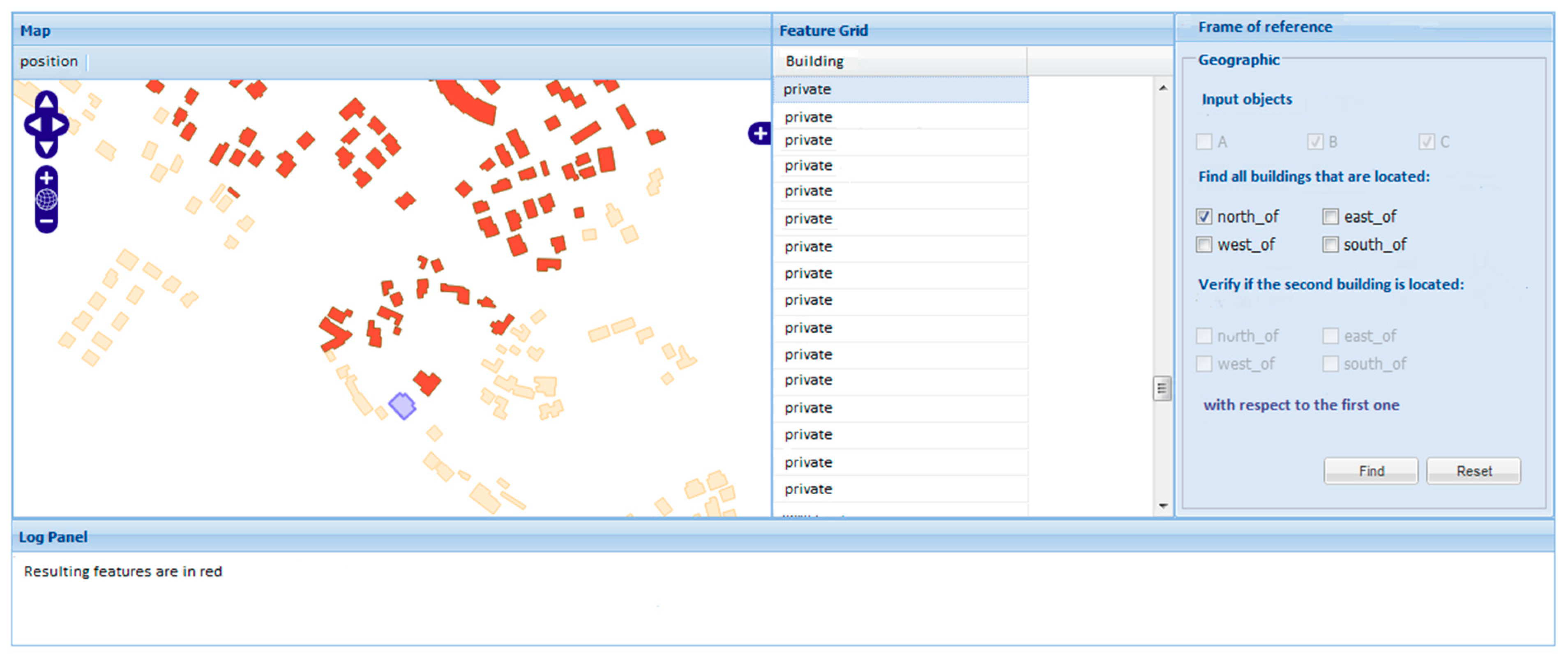
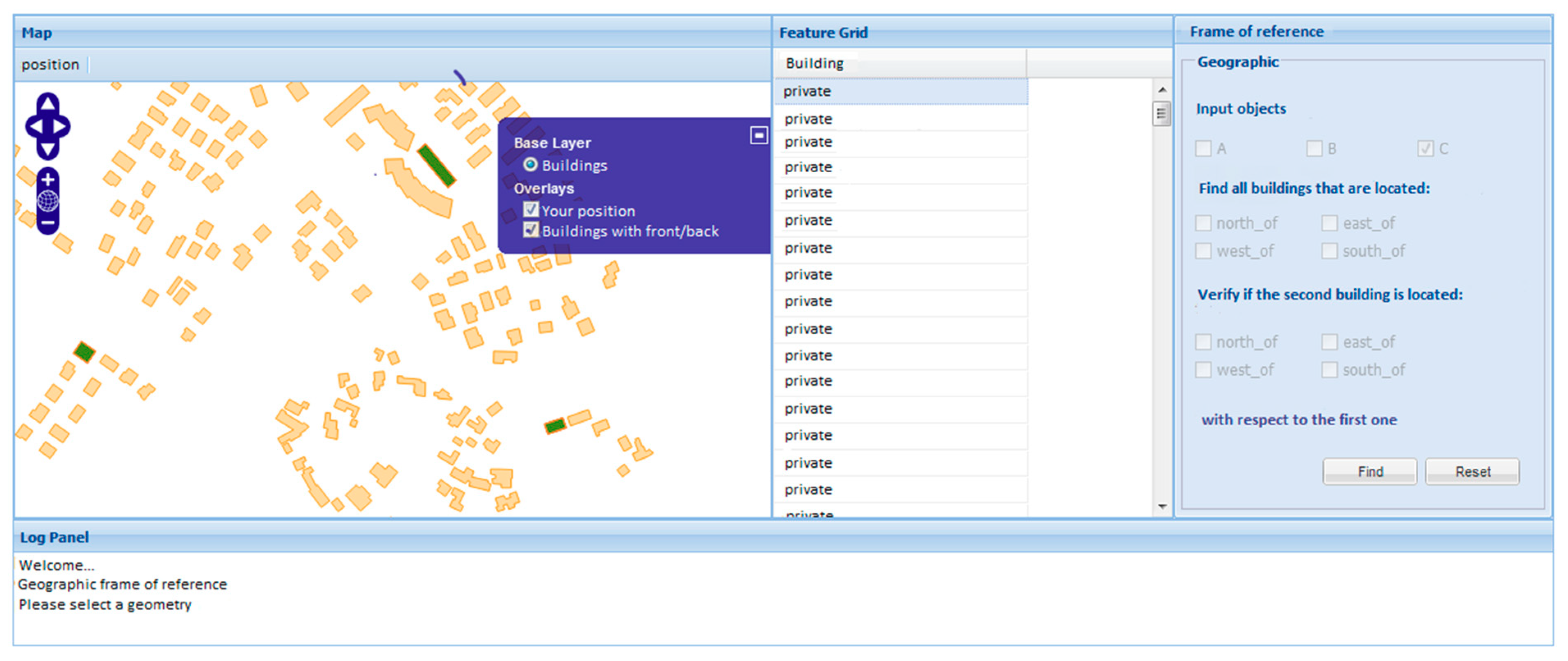
- Collection Geographic: it determines all the houses that are located to the north, south, west, east of a given house. The result is a collection of objects.
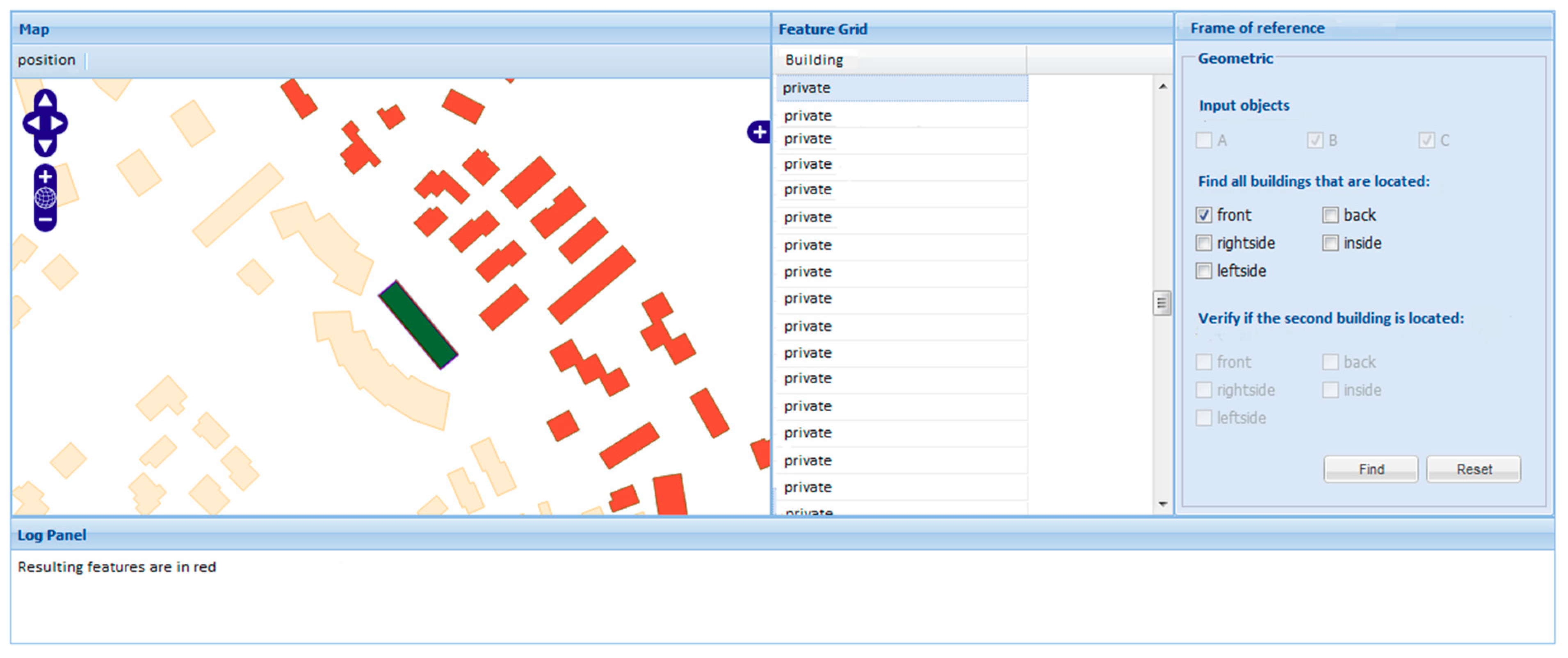
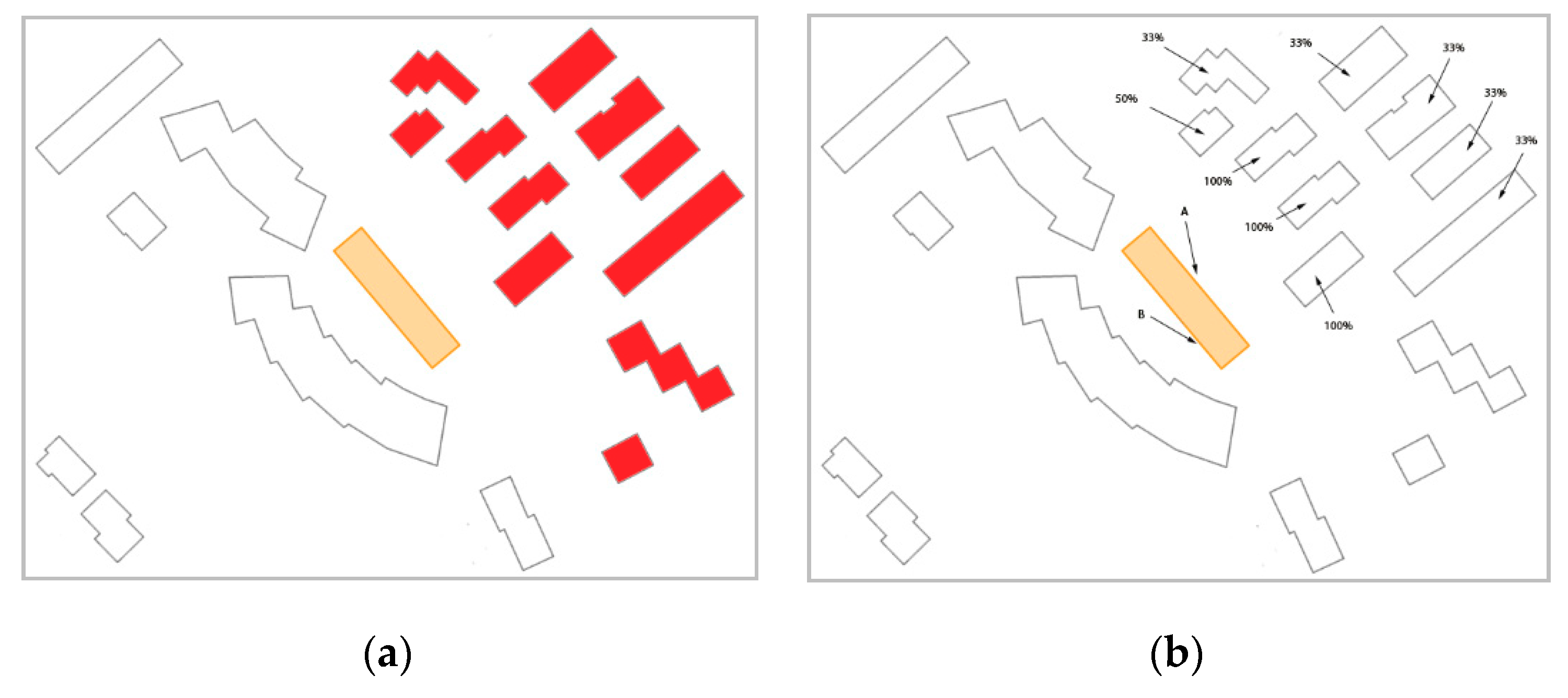
- Boolean Geometric: by activating a filter, it is possible to visualize the buildings on which the front and the rear side have been defined. Hence, it is possible to know whether a building is at the front, right, left, or back of another building. The return data is a Boolean value.
- Collection Geometric: It permits the identification of all the buildings that are at the front, right, left, and back of another building.
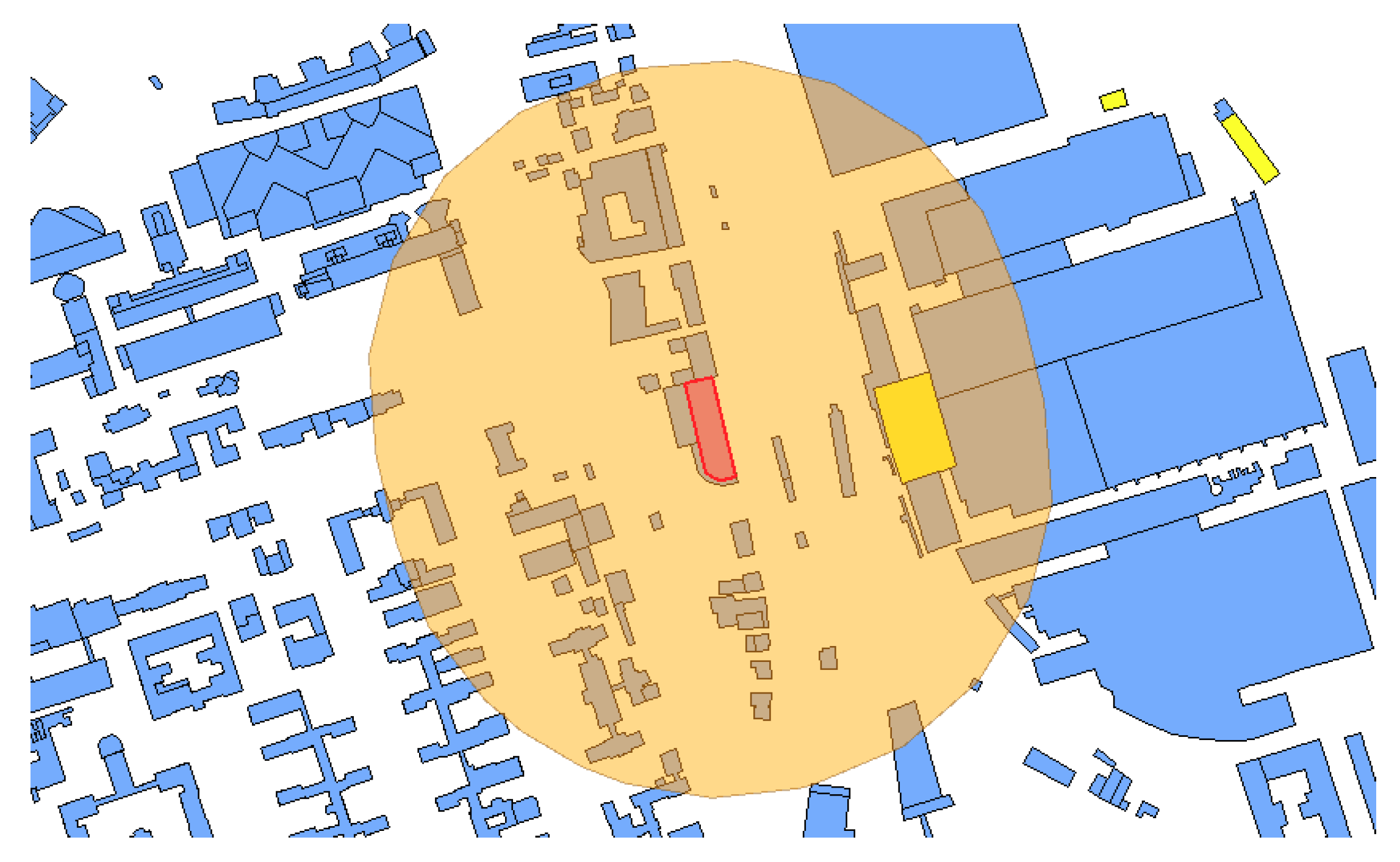
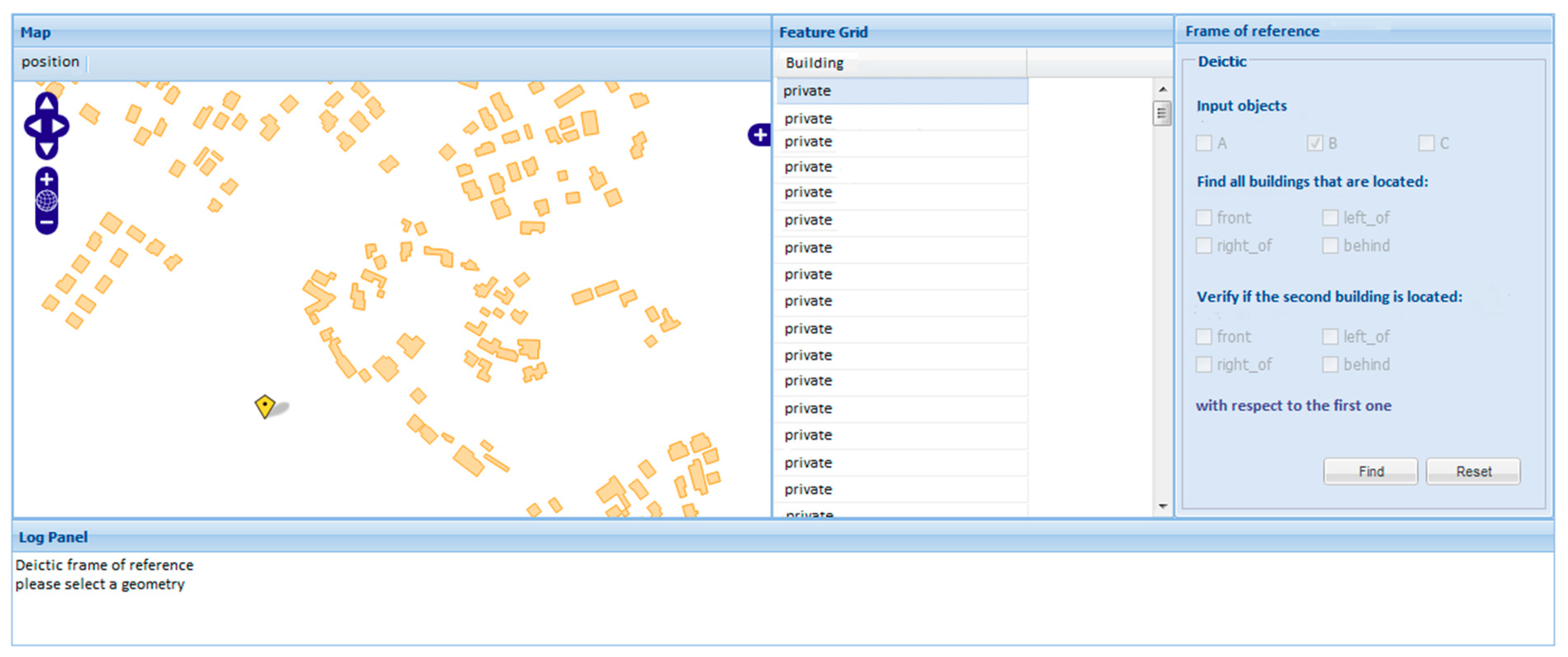
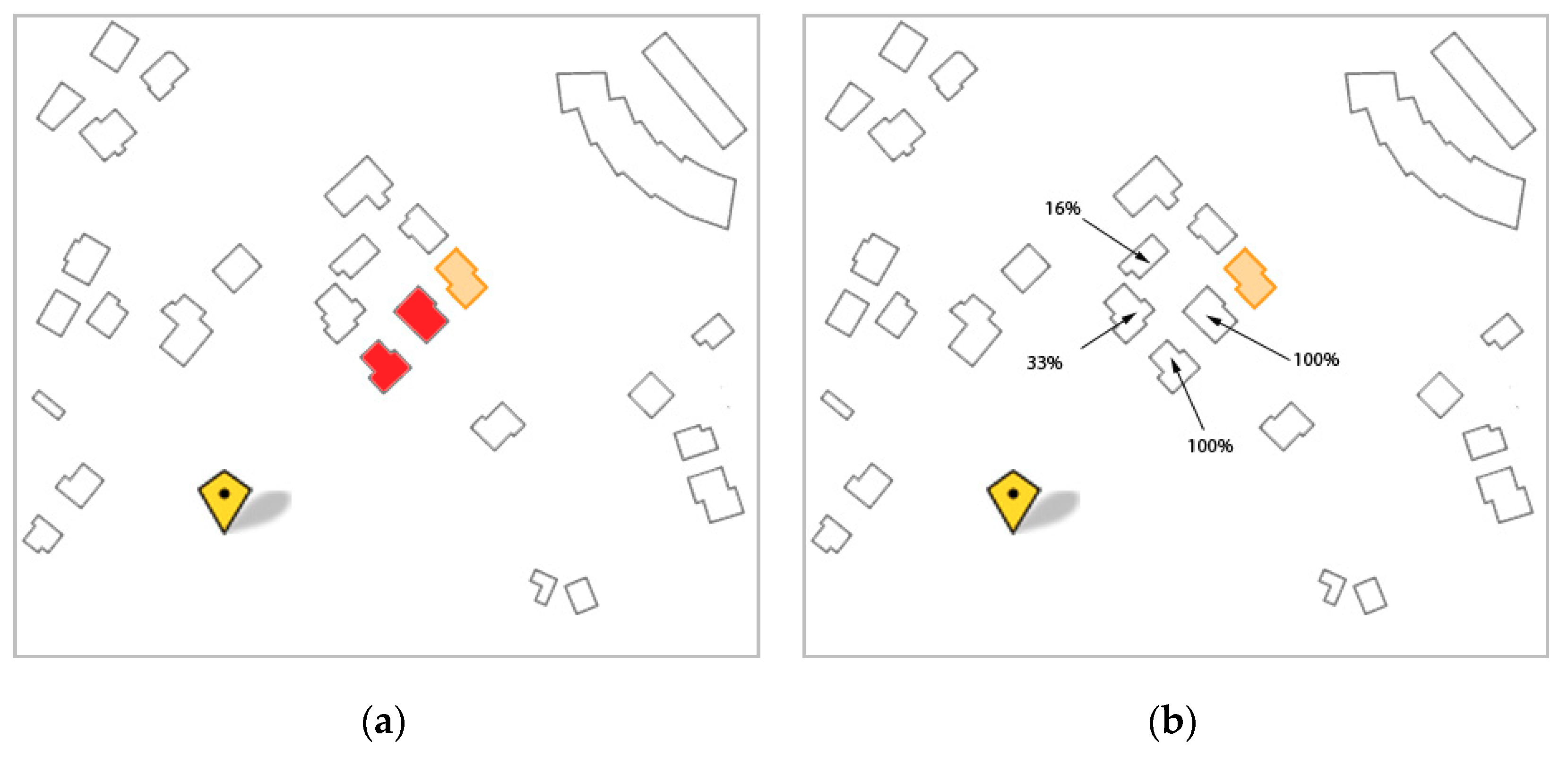
- Boolean Deictic: based on an individual’s position, it is possible to check whether a house is to the left, right, front, or behind of another house with respect to the considered point of view.
- Collection Deictic: like Boolean deictic, but it retrieves all the houses that satisfy the properties.
4.1. Geographic Frame of Reference
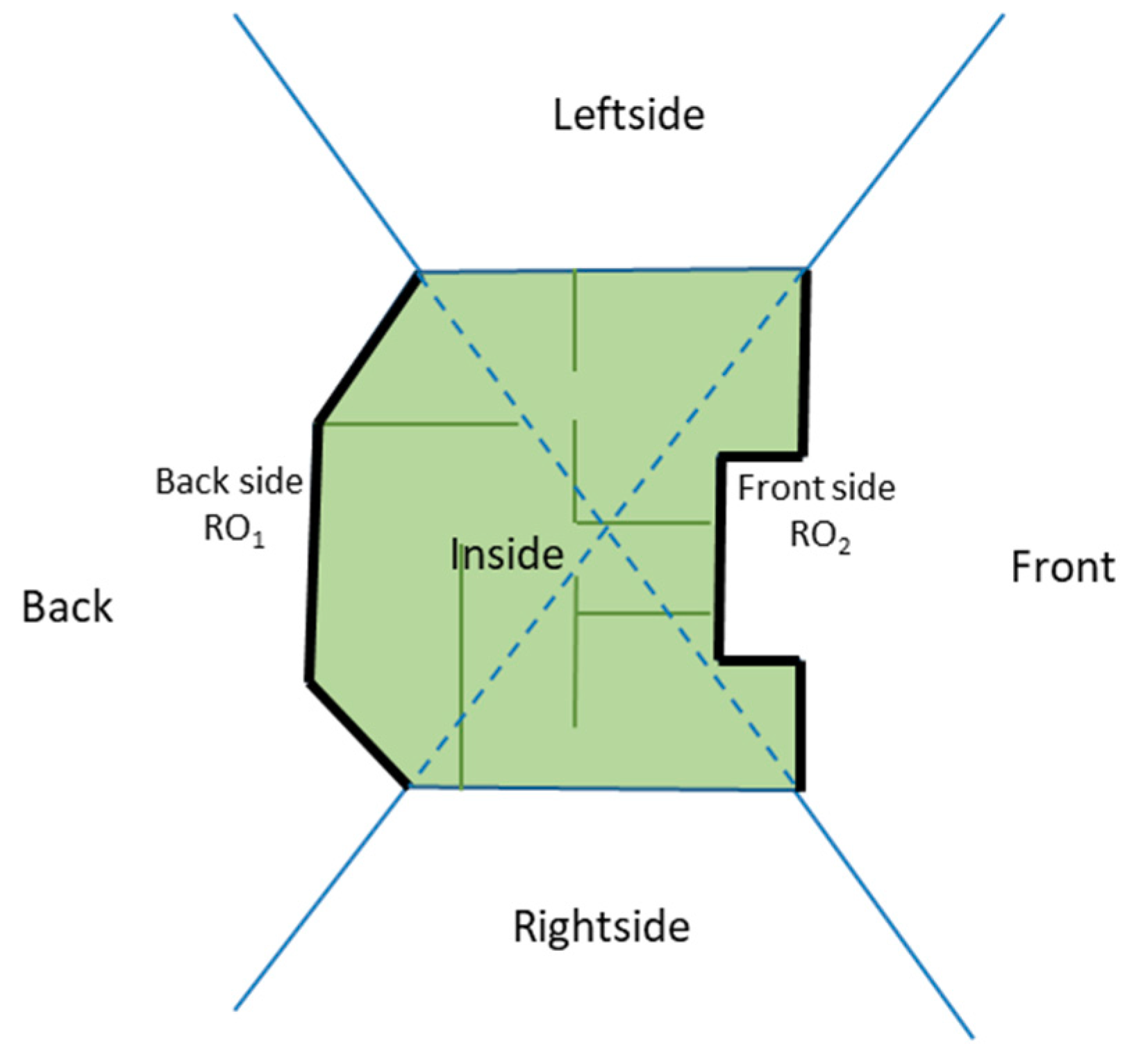
4.2. Geometric Frame of Reference
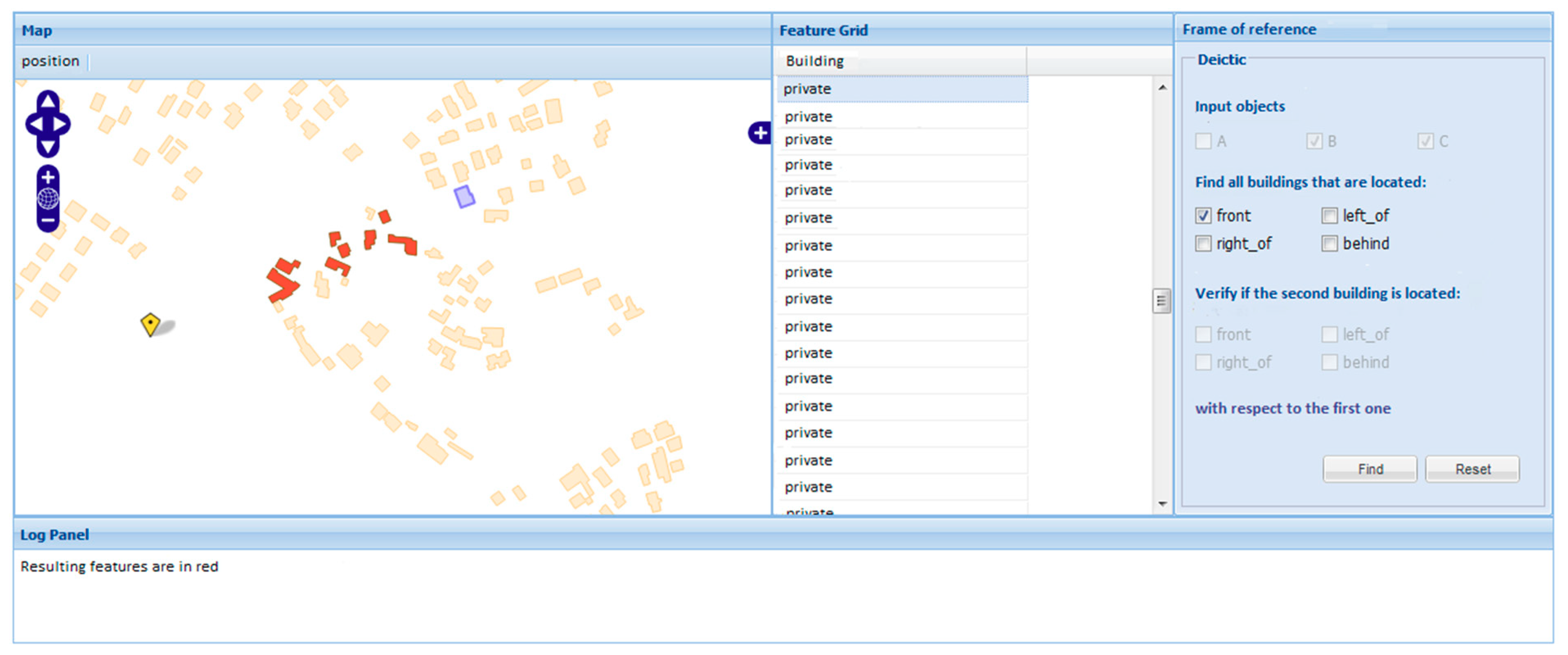
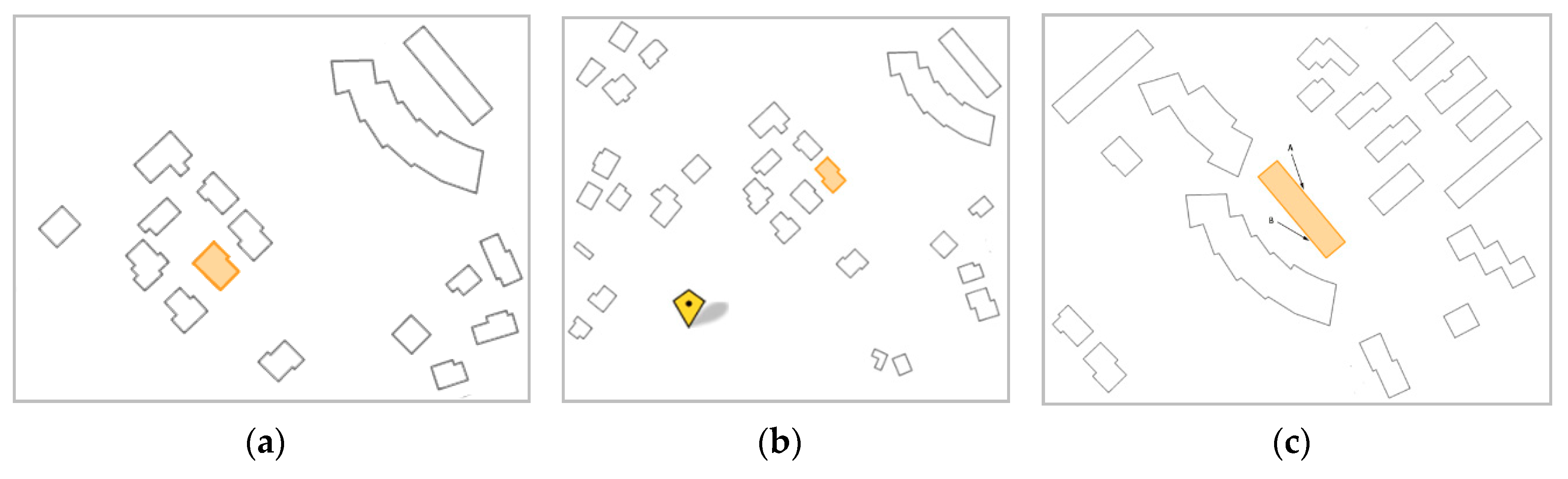
4.3. Deictic Frame of Reference
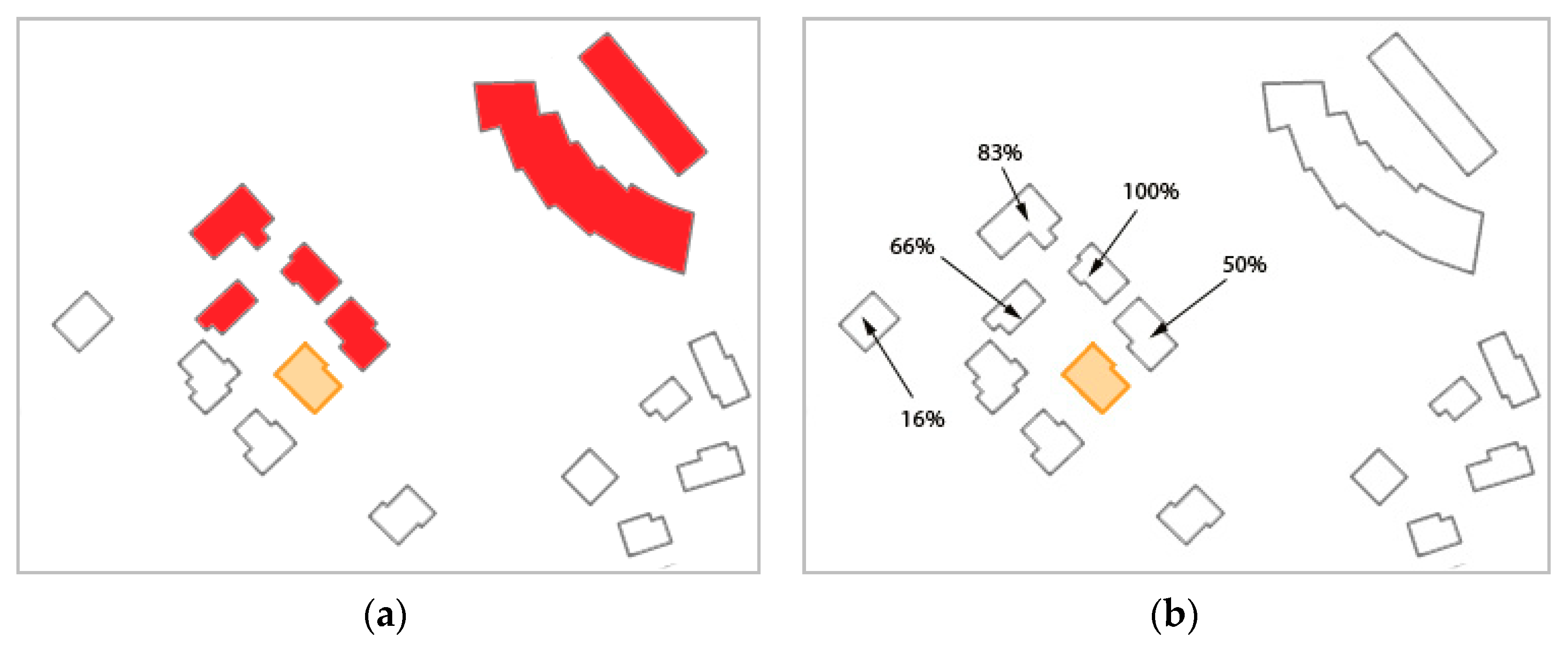
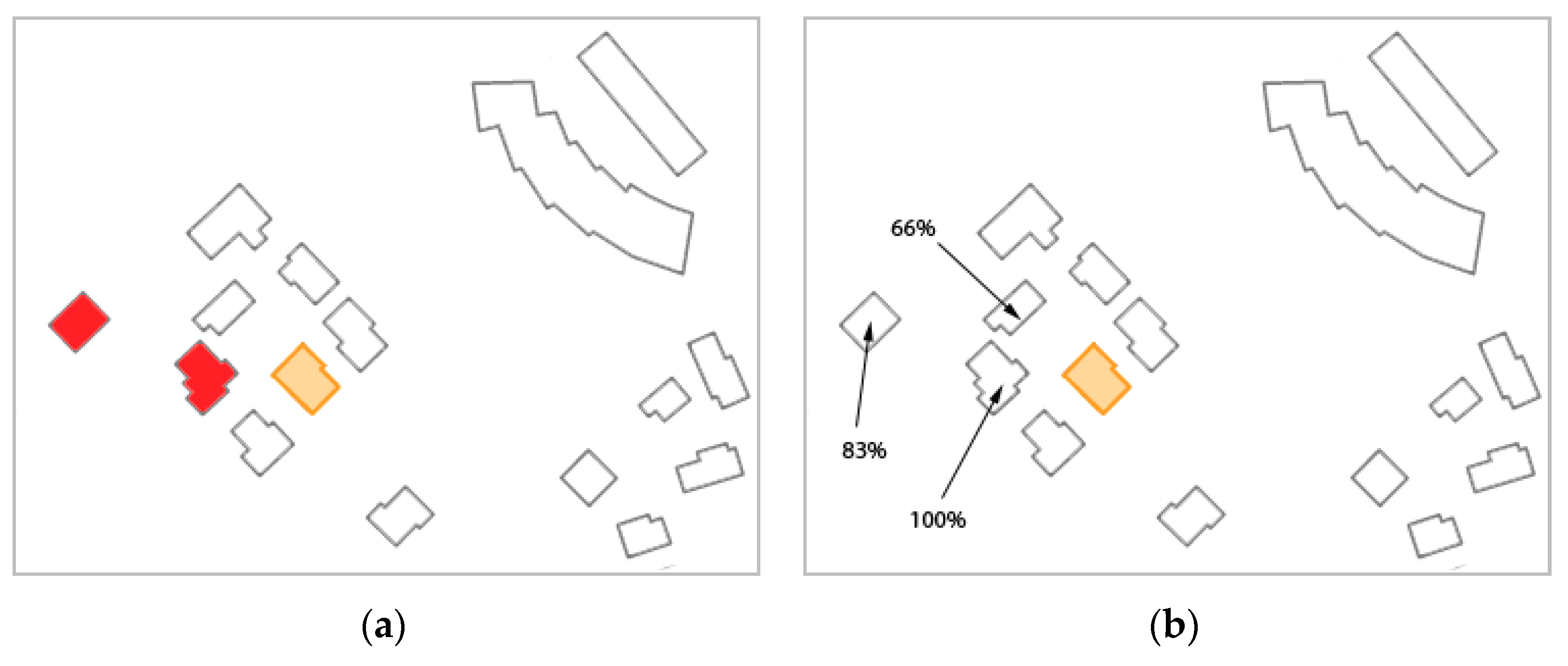
5. User Tests of the Application Framework
5.1. Preparation of the Test
5.2. Test Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Egenhofer, M.J.; Herring, J.R. Categorizing Binary Topological Relationships between Regions, Lines, and Points in Geographic Databases; Technical Report; Department of Surveying Engineering, University of Maine: Orono, ME, USA, 1990; p. 28. [Google Scholar]
- Clementini, E.; Cohn, A.G. RCC*-9 and CBM*. In Geographic Information Science, Proceedings of the 8th International Conference, GIScience 2014, Vienna, Austria, 24–26 September 2014; Duckham, M., Pebesma, E., Stewart, K., Frank, A.U., Eds.; Springer: Berlin, Germany, 2014; Volume LNCS 8728, pp. 349–365. [Google Scholar]
- Tarquini, F.; Clementini, E. Spatial relations between classes as integrity constraints. Trans. GIS 2008, 12, 45–57. [Google Scholar] [CrossRef]
- Clementini, E. Ontological Impedance in 3D Semantic Data Modeling. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences XXXVIII-4, Part W15, Proceedings of the ISPRS: 5th 3D GeoInfo Conference, Berlin, Germany, 3–4 November 2010; Kolbe, T.H., König, G., Nagel, C., Eds.; Shaker Verlag GmbH: Aachen, Germany, 2010; pp. 97–100. [Google Scholar]
- Bucher, B.; Falquet, G.; Clementini, E.; Sester, M. Towards a typology of spatial relations and properties for urban applications. In 3u3d2012: Usage, Usability, and Utility of 3D City Models, Proceedings of the European Cost Action TU801 Final Conference, Nantes, France, 29–31 October 2012; EDP Sciences: Les Ulis, France, 2012. [Google Scholar]
- Billen, R.; Clementini, E. Introducing a reasoning system based on ternary projective relations. In Developments in Spatial Data Handling, 11th International Symposium on Spatial Data Handling; Fisher, P., Ed.; Springer: Berlin, Germany, 2005; pp. 381–394. [Google Scholar]
- Billen, R.; Clementini, E. Semantics of collinearity among regions. In On the Move to Meaningful Internet Systems 2005: OTM Workshops, Proceedings of the 1st International Workshop on Semantic-based Geographical Information Systems (SeBGIS’05), Agia Napa, Cyprus, 31 October–4 November 2005; Meersman, R., Tari, Z., Herrero, P., Eds.; Springer: Berlin, Germany, 2005; Volume 3762, pp. 1066–1076. [Google Scholar]
- Billen, R.; Clementini, E. Projective relations in a 3D environment. In Geographic Information Science, Proceedings of the 4th International Conference, GIScience 2006, Münster, Germany, 20–23 September 2006; Raubal, M., Miller, H., Frank, A., Goodchild, M., Eds.; Springer: Berlin, Germany, 2006; Volume 4197, pp. 18–32. [Google Scholar]
- Clementini, E. Projective Relations on the Sphere. In Advances in Conceptual Modeling—Challenges and Opportunities—ER 2008 Workshops, Proceedings of the 2nd International Workshop on Semantic and Conceptual Issues in GIS (SeCoGIS 2008), Barcelona, Spain, 20–23 October; Song, I.-Y., Ed.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5232, pp. 313–322. [Google Scholar]
- Bartie, P.; Clementini, E.; Reitsma, F. A Qualitative Model for Describing the Arrangement of Visible Cityscape Objects from an Egocentric Viewpoint. Comput. Environ. Urban Syst. 2013, 38, 21–34. [Google Scholar] [CrossRef]
- Fogliaroni, P.; Clementini, E. Modeling Visibility in 3D Space: A Qualitative Frame of Reference. In 3D Geoinformation Science: The Selected Papers of the 3D GeoInfo 2014; Breunig, M., Al-Doori, M., Butwilowski, E., Kuper, P.V., Benner, J., Haefele, K.H., Eds.; Springer: Berlin, Germany, 2015; Volume LNG&C, pp. 243–258. [Google Scholar]
- Bartie, P.; Reitsma, F.; Clementini, E.; Kingham, S. Referring Expressions in Location Based Services: The case of the ‘Opposite’ Relation. In Advances in Conceptual Modeling. Recent Developments and New Directions—ER 2011 Workshops, Proceedings of the Fifth International Workshop on Semantic and Conceptual Issues in GIS (SeCoGIS 2011), Brussels, Belgium, 1 November 2011; De Troyer, O., Bauzer Medeiros, C., Billen, R., Hallot, P., Simitsis, A., Van Mingroot, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume LNCS 6999, pp. 231–240. [Google Scholar]
- Liu, X.; Shekhar, S.; Chawla, S. Object-based directional query processing in spatial databases. IEEE Trans. Knowl. Data Eng. 2003, 15, 295–304. [Google Scholar] [Green Version]
- Worboys, M.; Duckham, M.; Kulik, L. Commonsense notions of proximity and direction in environmental space. Spat. Cogn. Comput. 2004, 4, 285–312. [Google Scholar] [CrossRef]
- Frank, A. Qualitative Spatial Reasoning about Cardinal Directions. In Proceedings of the Tenth International Symposium on Computer-Assisted Cartography (AUTO CARTO 10), Baltimore, MD, USA, 25–28 March 1991; pp. 148–167. [Google Scholar]
- Goyal, R.; Egenhofer, M.J. The Direction-Relation Matrix: A Representation of Direction Relations for Extended Spatial Objects. In Proceedings of the UCGIS Annual Assembly and Summer Retreat, Bar Harbor, ME, USA, 15–21 June 1997. [Google Scholar]
- Kulik, L.; Klippel, A. Reasoning about Cardinal Directions Using Grids as Qualitative Geographic Coordinates. In Spatial Information Theory: Cognitive and Computational Foundations of Geographic Information Science, Proceedings of the International Conference COSIT'99, 25–29 August 1999, Stade, Germany; Freksa, C., Mark, D.M., Eds.; Springer: Berlin, Germany, 1999; Volume 1661, pp. 205–220. [Google Scholar]
- Levinson, S.C. Frames of reference and Molyneux’s question: Crosslinguistic evidence. In Language and Space; Bloom, P., Peterson, M.A., Nadel, L., Garrett, M.F., Eds.; The MIT Press: Cambridge, MA, USA, 1996; pp. 109–169. [Google Scholar]
- Retz-Schmidt, G. Various Views on Spatial Prepositions. AI Mag. 1988, 9, 95–105. [Google Scholar]
- Frank, A.U. Formal Models for Cognition—Taxonomy of Spatial Location Description and Frames of Reference. In Spatial Cognition: An Interdisciplinary Approach to Representing and Processing Spatial Knowledge; Freksa, C., Habel, C., Wender, K.F., Eds.; Springer: Berlin, Germany, 1998; Volume 1404, pp. 293–312. [Google Scholar]
- Clementini, E. Directional relations and frames of reference. GeoInformatica 2013, 17, 235–255. [Google Scholar] [CrossRef]
- Hua, H.; Renz, J.; Ge, X. Qualitative Representation and Reasoning over Direction Relations across Different Frames of Reference. In Principles of Knowledge Representation and Reasoning, Proceedings of the Sixteenth International Conference, KR 2018, Tempe, AZ, USA, 30 October–2 Vovember 2018; AAAI Press: Palo Alto, CA, USA, 2018; pp. 551–560. [Google Scholar]
- Scheider, S.; Hahn, J.; Weiser, P.; Kuhn, W. Computing with cognitive spatial frames of reference in GIS. Trans. GIS 2018, 22, 1083–1104. [Google Scholar] [CrossRef]
- Clementini, E.; Billen, R. Modeling and computing ternary projective relations between regions. IEEE Trans. Knowl. Data Eng. 2006, 18, 799–814. [Google Scholar] [CrossRef] [Green Version]
- Clementini, E.; Billen, R. Projective Relations. In Encyclopedia of GIS, 2nd ed.; Shekhar, S., Xiong, H., Zhou, X., Eds.; Springer International Publishing: New York, NY, USA, 2016; pp. 1–10. [Google Scholar]
- Mortari, F.; Zlatanova, S.; Liu, L.; Clementini, E. “Improved Geometric Network Model” (IGNM): A novel approach for deriving Connectivity Graphs for Indoor Navigation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II-4, 45–51. [Google Scholar] [CrossRef]
- Russo, D.; Zlatanova, S.; Clementini, E. Route Directions Generation using Visible Landmarks. In Proceedings of the Sixth ACM SIGSpatial International Workshop on Indoor Spatial Awareness (ISA 2014), Tampa, FL, USA, 8–12 September 2014; Claramunt, C., Li, K.-J., Zlatanova, S., Eds.; ACM: New York, NY, USA, 2014; pp. 1–8. [Google Scholar]
- Fogliaroni, P.; D’Antonio, F.; Clementini, E. Data trustworthiness and user reputation as indicators of VGI quality. Geo-Spat. Inf. Sci. 2018, 21, 213–233. [Google Scholar] [CrossRef]
- Martella, R.; Kray, C.; Clementini, E. A Gamification Framework for Volunteered Geographic Information. In AGILE 2015—Geographic Information Science as an Enabler of Smarter Cities and Communities; Bação, F., Santos, M.Y., Painho, M., Eds.; Springer: Berlin, Germany, 2015; Volume Lecture Notes in Geoinformation and Cartography; pp. 73–89. [Google Scholar]

























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Clementini, E.; Bellizzi, G. A Geospatial Application Framework for Directional Relations. ISPRS Int. J. Geo-Inf. 2019, 8, 33. https://doi.org/10.3390/ijgi8010033
Clementini E, Bellizzi G. A Geospatial Application Framework for Directional Relations. ISPRS International Journal of Geo-Information. 2019; 8(1):33. https://doi.org/10.3390/ijgi8010033
Chicago/Turabian StyleClementini, Eliseo, and Giampaolo Bellizzi. 2019. "A Geospatial Application Framework for Directional Relations" ISPRS International Journal of Geo-Information 8, no. 1: 33. https://doi.org/10.3390/ijgi8010033
APA StyleClementini, E., & Bellizzi, G. (2019). A Geospatial Application Framework for Directional Relations. ISPRS International Journal of Geo-Information, 8(1), 33. https://doi.org/10.3390/ijgi8010033