1. Introduction
The focus of this paper is on the scalable design of distributed control systems, which consist of sensors, actuators and controllers that are distributed in space and connected by wired or wireless networks. Technological advances in sensing, actuation and communication capabilities have created the possibility of distributed control systems of extremely large dimensions. Examples of emerging applications include distributed flow control [
1,
2], distributed vibration control and smart structures [
3,
4], formation control and vehicular platoons [
5,
6,
7], decentralized heating, cooling and illumination for energy-efficient buildings [
8,
9], optimal soil fertilization in agriculture [
10] and self-organizing PTZ (pan, tilt and zoom) cameras for optimal surveillance [
11]. Fundamentally, these systems consist of distributed controllers with a common global objective, whose dynamics are coupled with each other, because of overlapping influence regions. For instance, in the network-based environmental control applications, distributed actuators are required to maintain a desired attribute, such as temperature, lighting or humidity profile, across a given region in the presence of external disturbances.
Distributed computation of control inputs, without involving a centralized coordinator, is naturally preferred for solving this problem. However, from a communication perspective, a fundamental challenge still remains—the timely and reliable supply of required system state information to each controller. Typically, control decentralization is achieved either by first estimating a synchronous global state at all controllers and then computing the new input [
12] or by iteratively computing control inputs based on local information exchange until the solution converges to an optimal control input [
13]. Note that although consensus in these techniques is typically achieved by a local exchange of messages with neighboring controllers, both these methods involve several rounds of such message exchange before computing the next control input. Thus, the extent of information exchange is
essentially global. The reason for this global message exchange is the coupled dynamics between individual controllers that precludes independent decision-making.
In this paper, instead of requiring global information, we determine conditions under which information within a bounded locality around each controller is sufficient to achieve the required control objective. To do so, we exploit distance sensitivity properties [
14,
15] that are inherent in many distributed control systems,
i.e., the influence of an actuator on sensors decays with distance and, likewise, an actuator tends to be less impacted by sensors that are farther away. The paper then seeks to answer the question:
Can distance sensitivity in actuator influence be mapped to distance-sensitive information requirements?
We note that in general, distance sensitivity in controller influence does not directly translate to a completely decentralized system in which each controller’s actions can be based only upon information within a local region around the controller. This is true even if an actuator’s decaying influence is approximated to a bounded region around itself. This is because there exists a coupling between neighboring actuators in terms of the influence of their actions, which cascades through the network, and therefore, the control decisions cannot be made independently. For example, in the distributed environmental control application stated above, an actuators influence (such as that of a heater or a light source) can be expected to decrease spatially with distance, but this influence cascades through the system through neighboring actuators. Therefore, it is not immediately obvious that individual actuator decisions can be made in a decentralized manner. In this paper, we consider a distributed control system, where the dynamics of individual controllers are linear, time-invariant and use the decay characteristics of inverse matrices to identify local feedback conditions that can closely approximate the required control objective. By requiring only information within a bounded locality, we note that control can be achieved in time, independent of the dimensions of the control system. We also characterize the quality of the approximation as a function of the size of the locality over which information is exchanged. This characterization can be used to design scalable network services that can provide information to controllers, depending upon a desired level of performance.
2. Related Work
There is increasing interest in the design of distributed control and coordination algorithms for network-based dynamical systems, where the goal is achieving a global objective through local interactions. Broadly speaking, decentralization of control is achieved in two ways. The first is by estimating the state of the system at all controllers through several iterations of local message exchange and executing the control input after consensus has been achieved on the system state [
12]. The second technique is to successively determine control inputs based on localized message exchanges with neighboring controllers until convergence is achieved to the required state [
13]. Note that in both these methods, although message exchange in each iteration is local, information is essentially propagated system-wide through multiple such iterations before convergence is achieved. The focus of these methods is not on determining the locality over which information exchange is needed. Thus, although computation is distributed, the required communication is still global. Instead, in this paper, we focus on identifying the locality over which feedback is required for computing control inputs. We model the coupling between controllers using distance-sensitive characteristics and exploit that to determine the region surrounding each controller from where feedback is sufficient to decide control input within a given margin of error.
In [
15], we have focused on the design of a network service that supplies
distance-sensitive snapshots of system state in a wireless sensor network. Transmitting the exact state of all nodes to all nodes instantaneously is infeasible in a wireless sensor network. Therefore, the paper identifies system snapshots that obey a property of distance sensitivity in latency and error,
i.e., information about farther nodes is available at higher latency and with more spatial compression. While the focus of [
15] is on the design of a network protocol for information supply, the focus in this paper is to consider physical systems that exhibit a distance-sensitive decay in controller influence and obtain conditions under which local feedback may be sufficient to achieve satisfactory control performance. Once these properties are known, a service, such as the one described in [
15], could be utilized for the delivery of information to the controllers (but only within a bounded region).
In [
14], we have shown that information that degrades in quality (latency, error) as a function of distance is still enough to design optimal pursuit control systems on top of a wireless sensor network. On the other hand, in this paper, we model the impact of controllers as a decaying function of distance and identify conditions under which information within a bounded region of each controller may be sufficient to achieve control.
In [
16], basis transformations are applied to the sensor output vector and the control input vector, which result in approximate diagonalization of the plant matrix, thereby allowing the use of a localized feedback law. However, the computation on the basis of which it transforms itself requires several communication iterations that span the entire network. In [
17], the importance of modeling the importance of sensor-actuator links to reduce communication is discussed in the context of wireless sensor actuator networks. However, the notion of importance is treated abstractly. In this paper, we model the importance specifically in the form of distance sensitivity that is typical in sensor-actuator network systems and use this abstraction to design corresponding network services that deliver required information.
In [
18], spatially decaying operators are defined to capture distance-dependent coupling between controllers in an infinite dimensional system with arbitrarily connected topologies. It is shown that in systems with distance-dependent coupling, the size of the feedback also decays as a function of distance between the subsystems,
i.e., at larger distances, the impact of feedback is smaller. However, the decay rates for the feedback may be arbitrarily slow. In this paper, we have used properties of the inverse of matrices to argue that under specific decay characteristics, the decay rates of the feedback are identical to the decay rates in the coupling dynamics. This is useful for large-scale finite dimensional systems.
In [
19,
20], a decentralized technique is presented for set-point control applications using wireless sensor actuator networks in which each actuator has a bounded influence region. The technique in [
19,
20] starts with the assumption that each sensor is only influenced by actuators within a bounded locality, and this is utilized in computing the control input. The focus of our paper, on the other hand, is to identify conditions under which local feedback is sufficient and in characterizing the impact of the size of the feedback region on the performance. In fact, our analysis points out that when the actuator influences are bounded locally and can be represented by a banded influence matrix, the computation of optimal control input may still depend on non-local information and could span a significant portion of the network. This is because the inverse of such matrices may not necessarily be approximated by banded matrices. Therefore, only relying on information within a bounded region of each actuator may not always result in convergence. By way of contrast, in this paper, we have focused on identifying characteristics of actuator influence matrices that result in sufficiency of local feedback for control within a given margin of error. We have specifically shown that when influence matrix can be characterized with a polynomially decaying function off its diagonal, the control input can be closely approximated using local feedback.
In [
21], the authors describe an event-triggered control idea, where sensor information is communicated to a controller only when a certain error condition is exceeded (triggered by an event), as opposed a periodic mode of control. This idea is complementary to the contributions in this paper and can be used in conjunction with the idea in this paper. For example, in our proposed solution, each sensor communicates its information to actuators only when the locally sensed error is greater than a certain threshold. That being said, the focus in our paper is also on determining which actuators should receive a sensors’ information. The work in [
21] does not focus on this question. In this paper, we determine bounds on the feedback region—a sensor that detects a local error only communicates its information within this distance.
3. System Description
We consider a sensor actuator network with
N nodes, connected by an underlying wired or wireless network. Each node is a combination of a sensor, actuator and a controller. The controller, in this case, corresponds to the computational element of the node; the controller decides the control input, which is then implemented by the actuator. Each node is assumed to be a linear system, and each node’s actuator can influence the state of other nodes in the system. This inter-node actuator influence is captured by a symmetric, positive-definite
matrix
B. Let
denote the state of node,
k, at time,
t, where
. Let
denote the control input of node,
k, at time,
t, where
. The aggregate dynamics of the control system is modeled in the discrete time domain as follows:
In the above equation, X represents the aggregate state and U represents the aggregate control input vector. Thus, and . The objective of the distributed control system is to drive the system to a desired state, , from an arbitrary initial state.
Let denote the element in row i and column j of matrix B. denotes the impact of the input at the actuator on the sensor. Each sensor, i, measures its local state, ; however, this alone is not enough to compute the required control input, , at node, i—it would need information about other nodes’ sensor values. We assume that sensor measurements at each node are perfect. Considerations of estimation and actuation errors are orthogonal to the topic of this paper. Our goal in this paper is to examine the impact of bounded locality feedback on the performance of the system.
Let
. The system in Equation (
1) can then be written as follows:
Thus, the optimal control inputs for time,
t, can be determined as
. Let
denote the element in row,
i, and column,
j, of matrix,
B. At a given actuator,
j, this control input would be computed as follows:
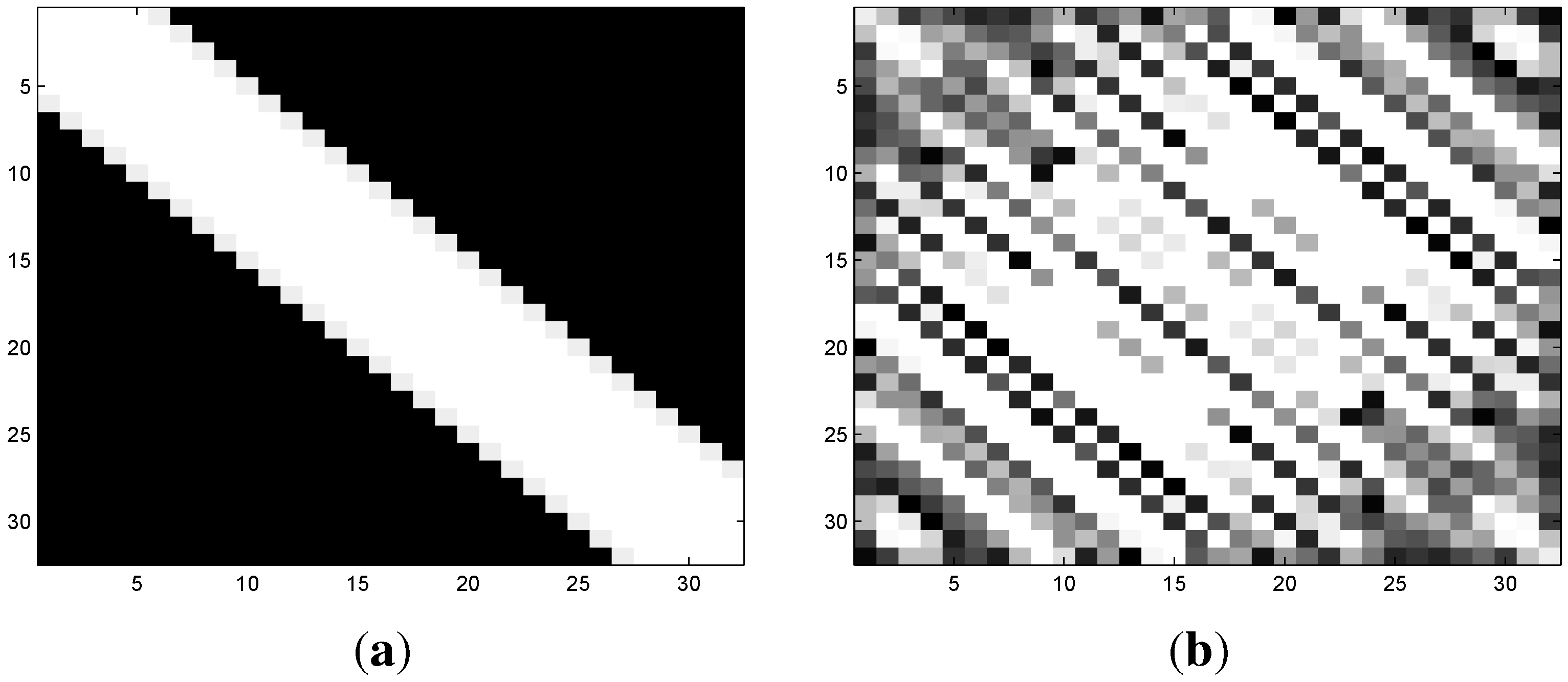
In general, the inverse, , is a full matrix. As a result, the computation of at each node involves obtaining the state information from every other node in the system. This involves a global exchange of state information, presenting an unreasonable communication burden on the sensor actuator network. However, if elements of are diagonally decaying, then many of the coefficients, , can be approximated by zero, thus reducing the amount of communication required. Our aim in the rest of this section is to describe conditions under which this approximation can be made without significant loss in performance and without loss in convergence.
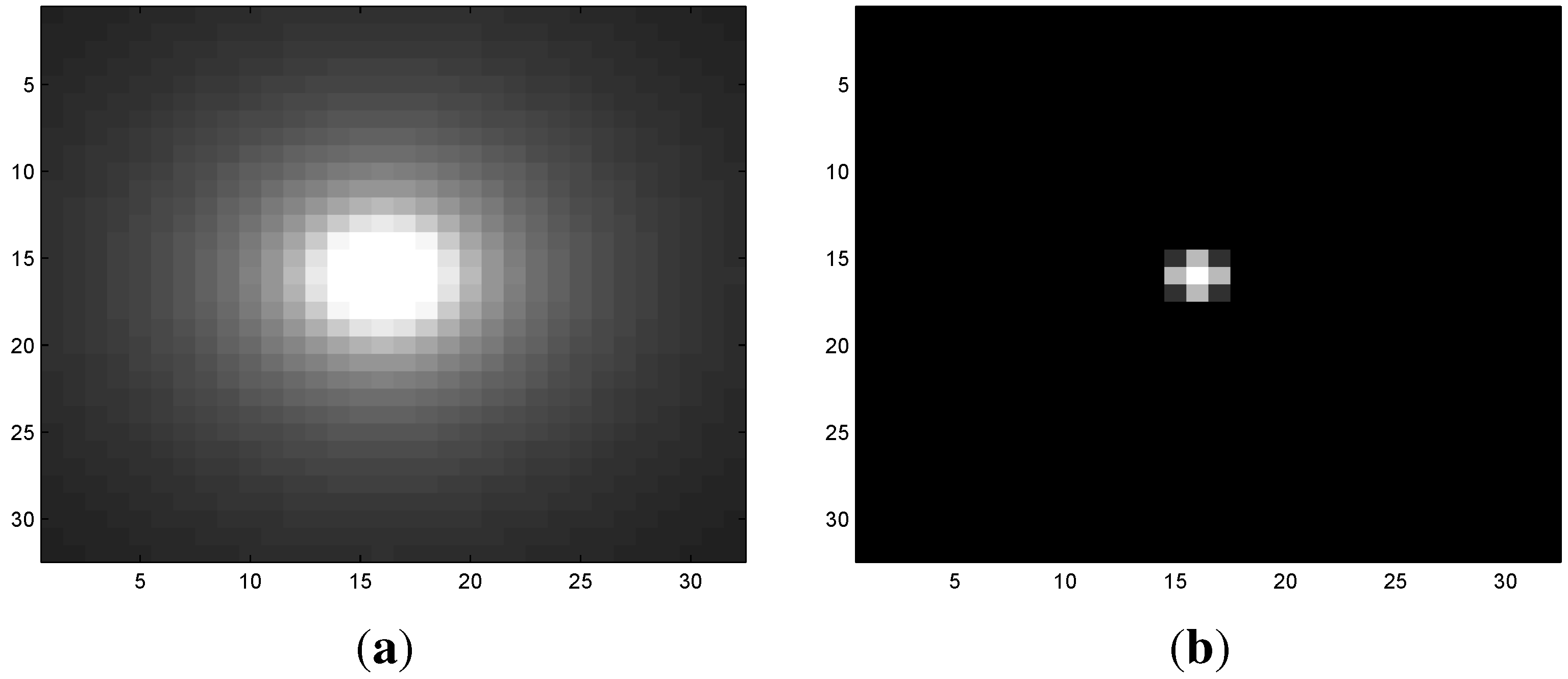
It turns out that if
B has some specific decay characteristics off its diagonals, then the inverse of
B can be approximated using banded matrices,
i.e., matrices whose off diagonal coefficients become zero beyond a certain row and column. In the following subsection, we recall some well-known theorems that enable us to identify approximations to
when
B exhibits off-diagonal decay characteristics. These results are significant in the context of sensor actuator network-based control, because in many cases, the actuators exhibit
distance-sensitive influence on surrounding nodes,
i.e., the influence of an actuator decays with increasing distance from the actuator. If this distance-sensitive property in actuator influence can be appropriately modeled by a matrix,
B, with off-diagonal decay characteristics, then the results of the following theorems can be used to achieve distributed control with local feedback. Moreover, the decay characteristics of the inverse matrices can be used to design a network service that delivers information to the controller that meets a required error constraint imposed by the application (this is described in
Section 4).
3.1. Theorems on Decay Rates of Inverse Matrices
The following theorems relate the off-diagonal decay of an invertible matrix to the off-diagonal decay of its inverse. The results originally appear in [
22,
23]. The results in [
22] have been translated to English and presented in [
24]. We first state a few definitions.
Let I be either the set of natural numbers, , or the set of integers, , or a finite set of integers, , and Let denote the Hilbert space corresponding to the set. Let denote the 2-norm of a matrix or a vector. Consider a symmetric, positive definite matrix, A, such that .
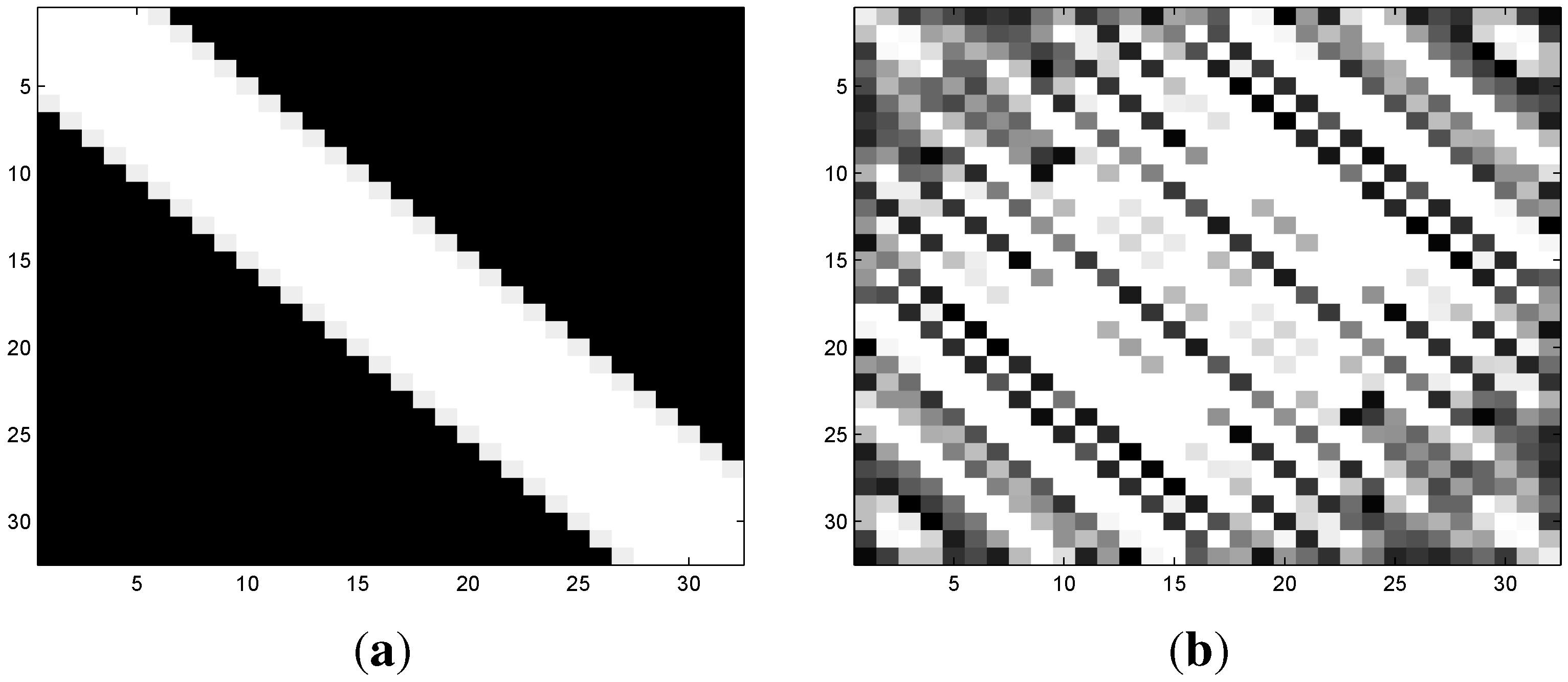
Theorem 3.1 (Banded matrix). Let A be s-banded, i.e.,
if .
Let ,
,
.
Then,where: Theorem 3.1 [
23] shows that the inverse of a banded matrix, in general, is not banded. This explains why control inputs cannot be determined only based on information within the influence region of each actuator. The inverse of banded matrices, in general, decay exponentially away from the diagonal, but the rate of decay may be arbitrarily slow.
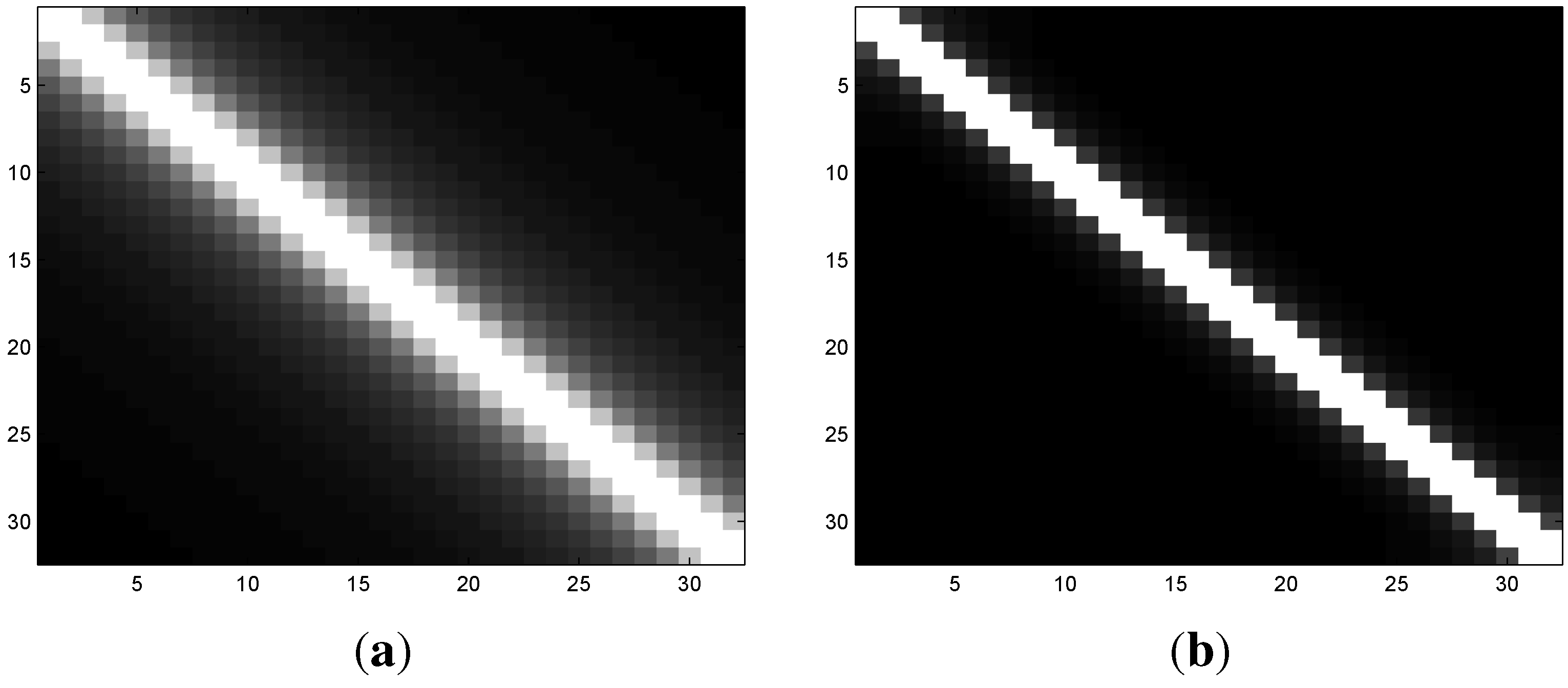
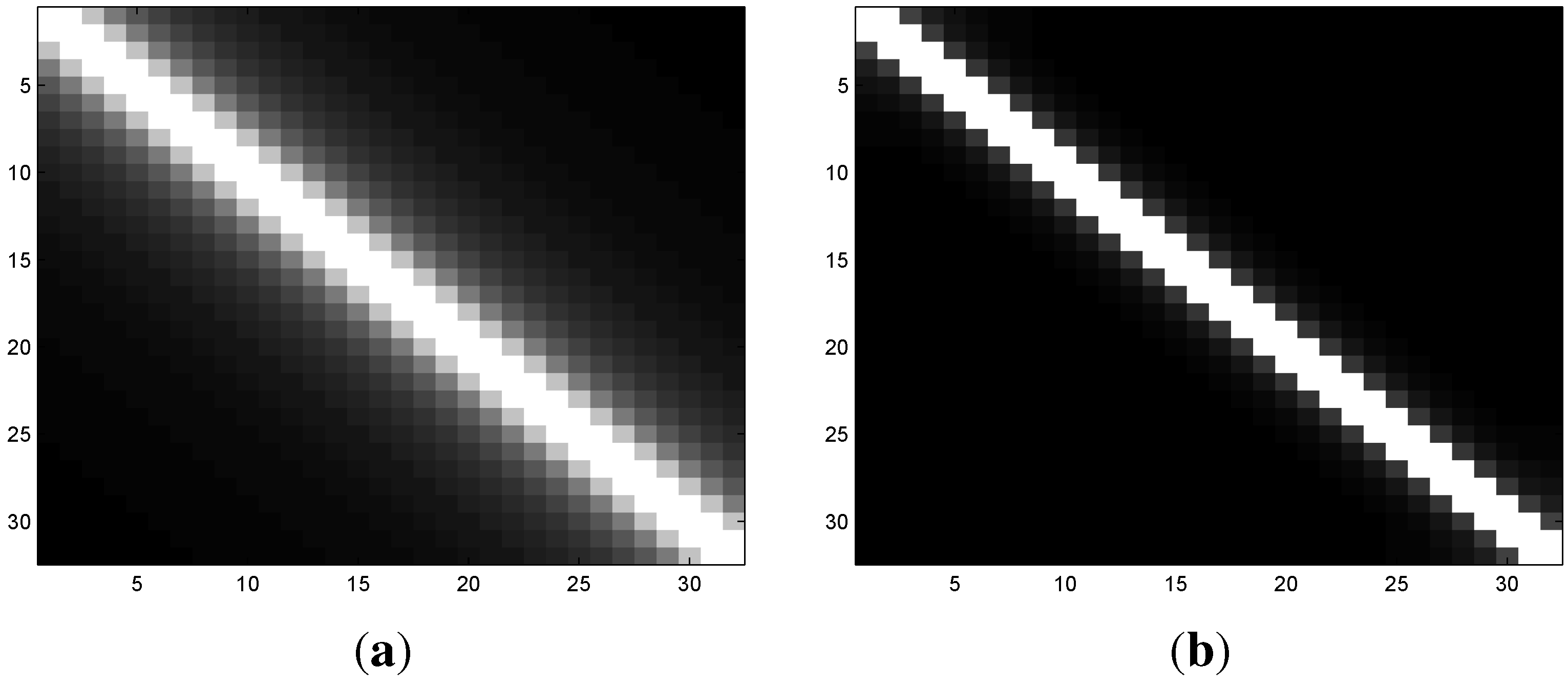
Theorem 3.2 (Exponentially decaying matrix). Let matrix A be such that its coefficients,
,
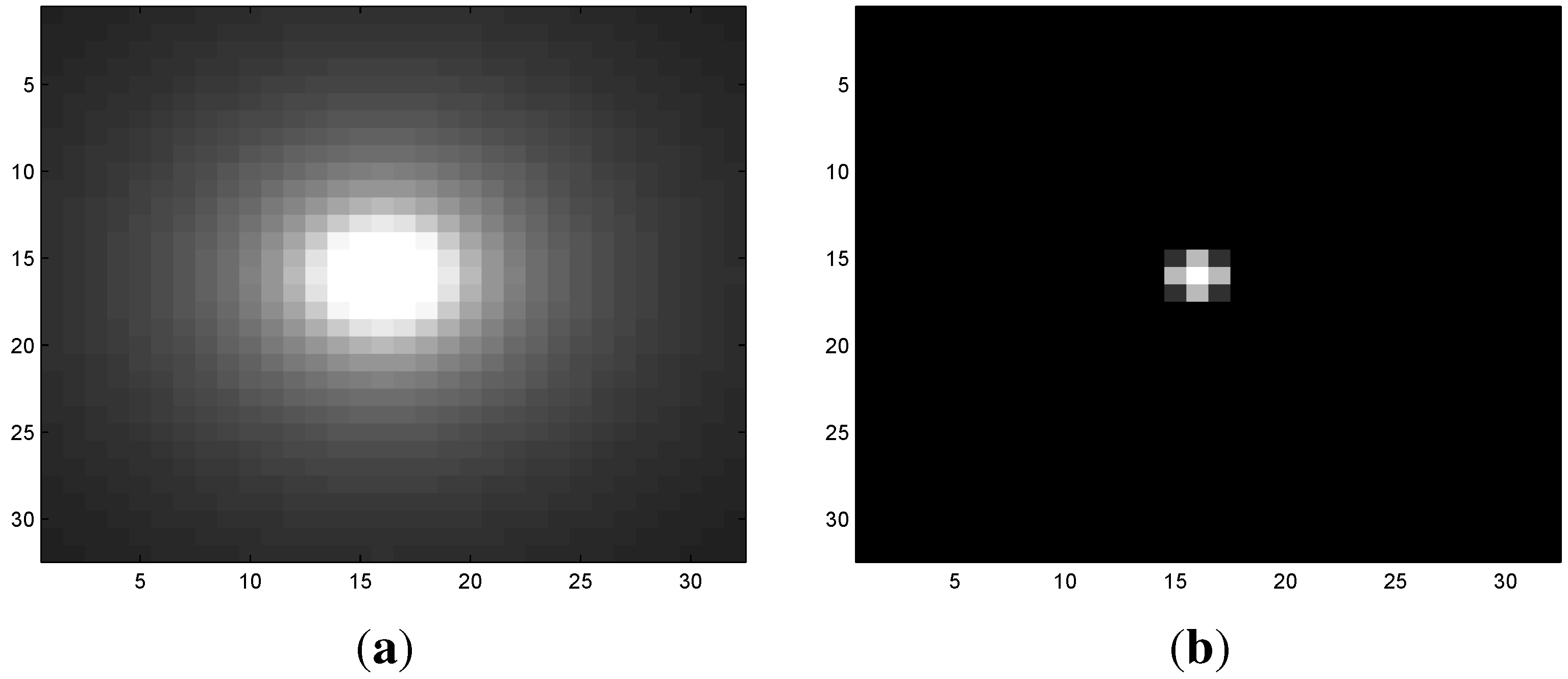
satisfy the following Equation: Then, the coefficients of the inverse matrix satisfy the following Equation: Theorem 3.3 (Polynomially decaying matrix). Let matrix A be such that its coefficients, ,
satisfy the following Equation: Then, the coefficients of the inverse matrix satisfy the following Equation: Of the three theorems, the theorem by Jaffard [
22] on the inverse of polynomially decaying matrices,
i.e., Theorem 3.3, is especially striking, because the decay rates are preserved in the inverse (the coefficient,
s, remains the same for determining coefficients of the original matrix and its inverse). In the case of the exponential and banded matrices, the inverse decay rates could be arbitrarily slow, and computation of control input could span feedback from a significant portion of the network, but this is not the case with polynomially decaying matrices. For large, but finite dimensional systems, this property is useful, because it can be used to limit the amount of feedback required in a sensor actuator network. In the following section, we specifically exploit this property of polynomially decaying matrices to design local feedback solutions for distributed sensor actuator systems.
4. Exploiting Polynomially Decaying Matrices for Local Feedback
As stated in the previous section, for polynomially decaying matrices, the decay rates of the coefficients are preserved in the inverse. This property can be exploited to limit the amount of feedback required in a sensor actuator network-based control system. Suppose matrix
B in Equation (
1) can be modeled as a polynomially decaying matrix, then the coefficients of matrix
would also exhibit a polynomially decaying characteristic. Furthermore, it turns out that in many of the sensor actuator network-based control applications, it is indeed the case that an actuators influence (such as that of a heater or a light source) can be modeled with such a spatially decaying characteristic. As a result, the matrix,
, can be approximated as a banded matrix by equating coefficients beyond a certain distance from the diagonal to be zero.
Let the approximation of
be denoted as
and let
whenever
(
is an integer). Thus Equation (
3) can now be written as follows:
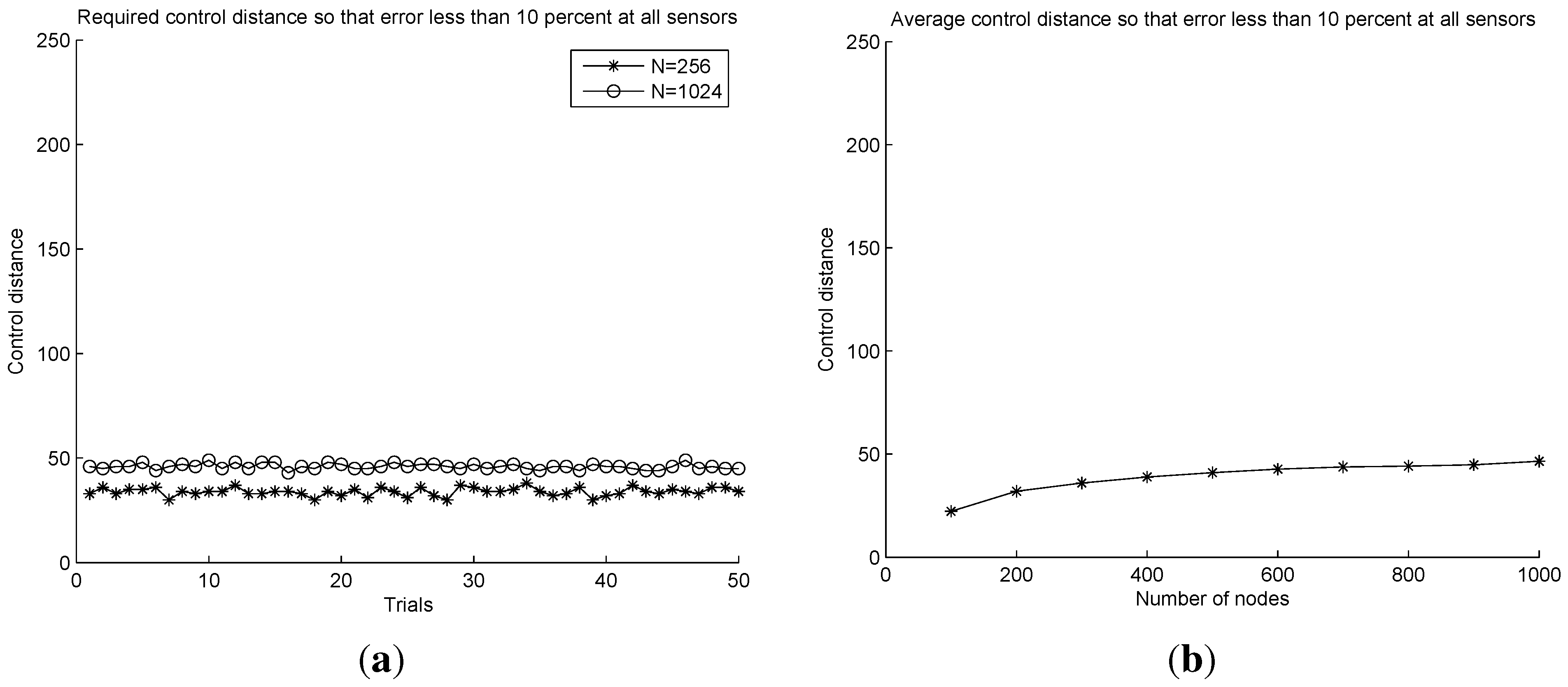
Thus, computation of control input, , at any actuator, j, now requires only sensor input from a distance of m around itself. This yields a simplified protocol for obtaining sensor inputs and computing control actions, as described next. We define the parameter, m, to be the control distance, the distance from each actuator, j, until which sensor information is supplied to j for computation of the next control input.
4.1. A Synchronized Protocol for Control Based on Local Feedback
The sufficiency of local feedback allows the design of a simple synchronized protocol for achieving large-scale distributed control. The operation is divided into discrete intervals. A desired set point () is assumed to be provided to each sensor, i.
Sensors: At the beginning of each interval, all sensors measure their local value (). If the error is not within a given margin of the required local set point, the difference is communicated to actuators within a control distance, m, from that sensor.
Actuators: At the beginning of each interval, the actuators use information received from the sensors over the previous round to determine the new control input for that interval. This process is repeated until the system has stabilized and no new sensor values are reported to any actuator.
With respect to communication of sensor information to actuators, we note that each actuator only relies on information within a distance,
m, as opposed to global network-wide information. The fact that
is expected to ease the burden on the underlying network, and multi-hop broadcast protocols for wireless networks, such as [
15], can be used for this purpose.
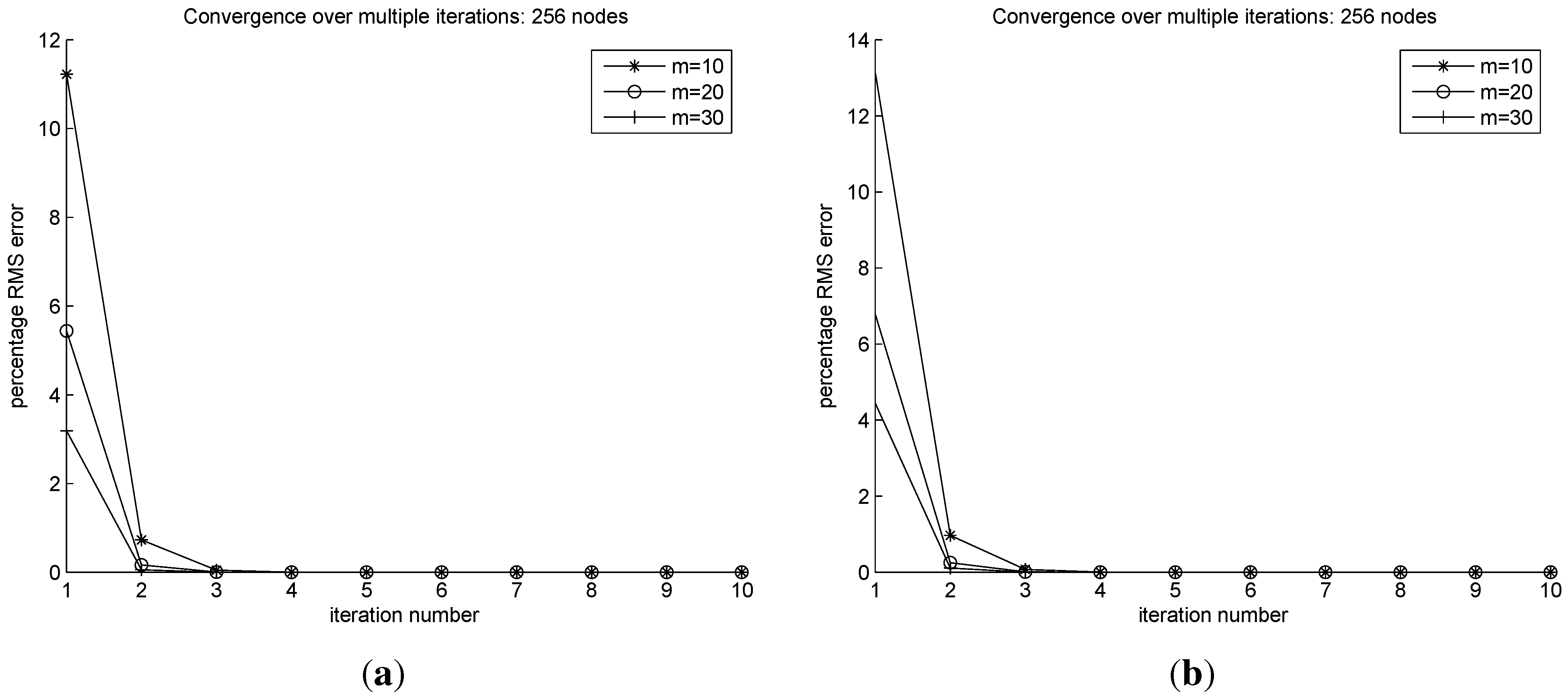
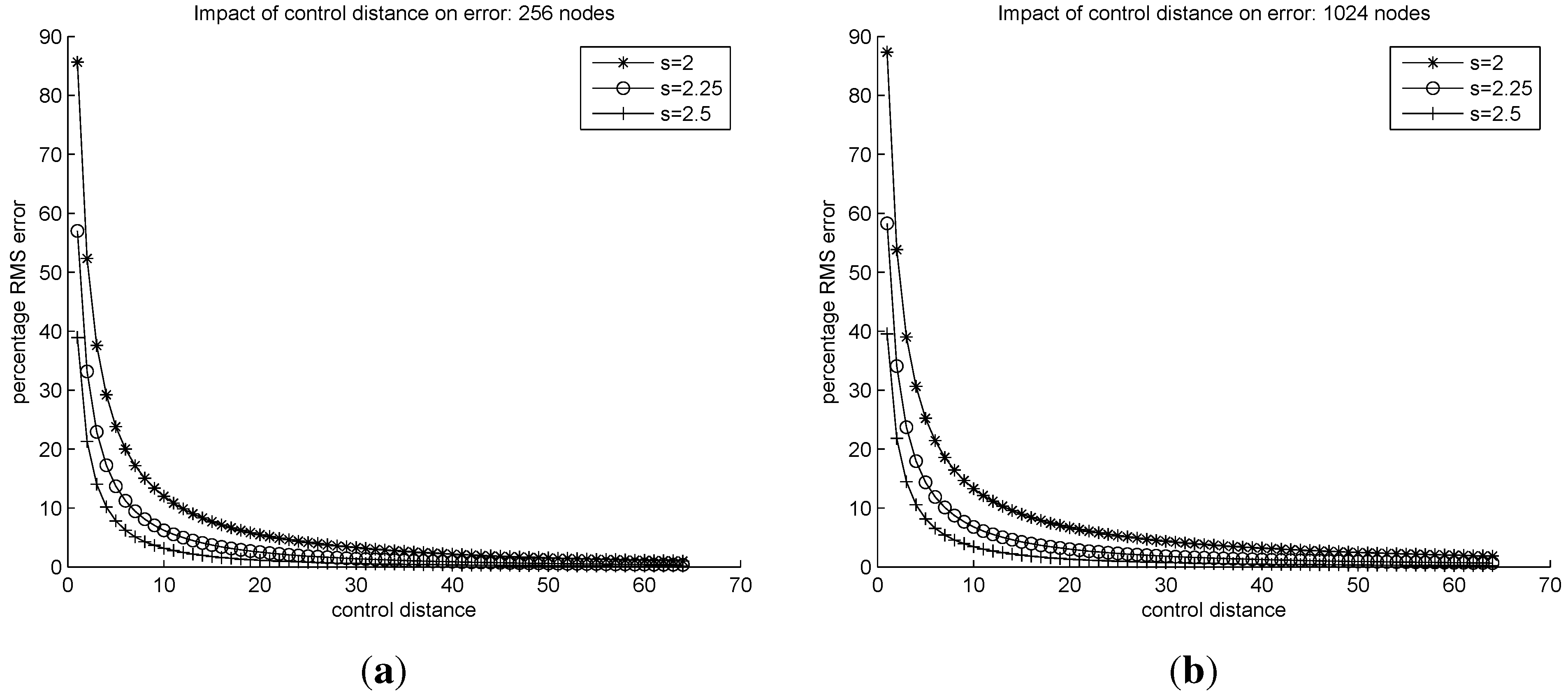
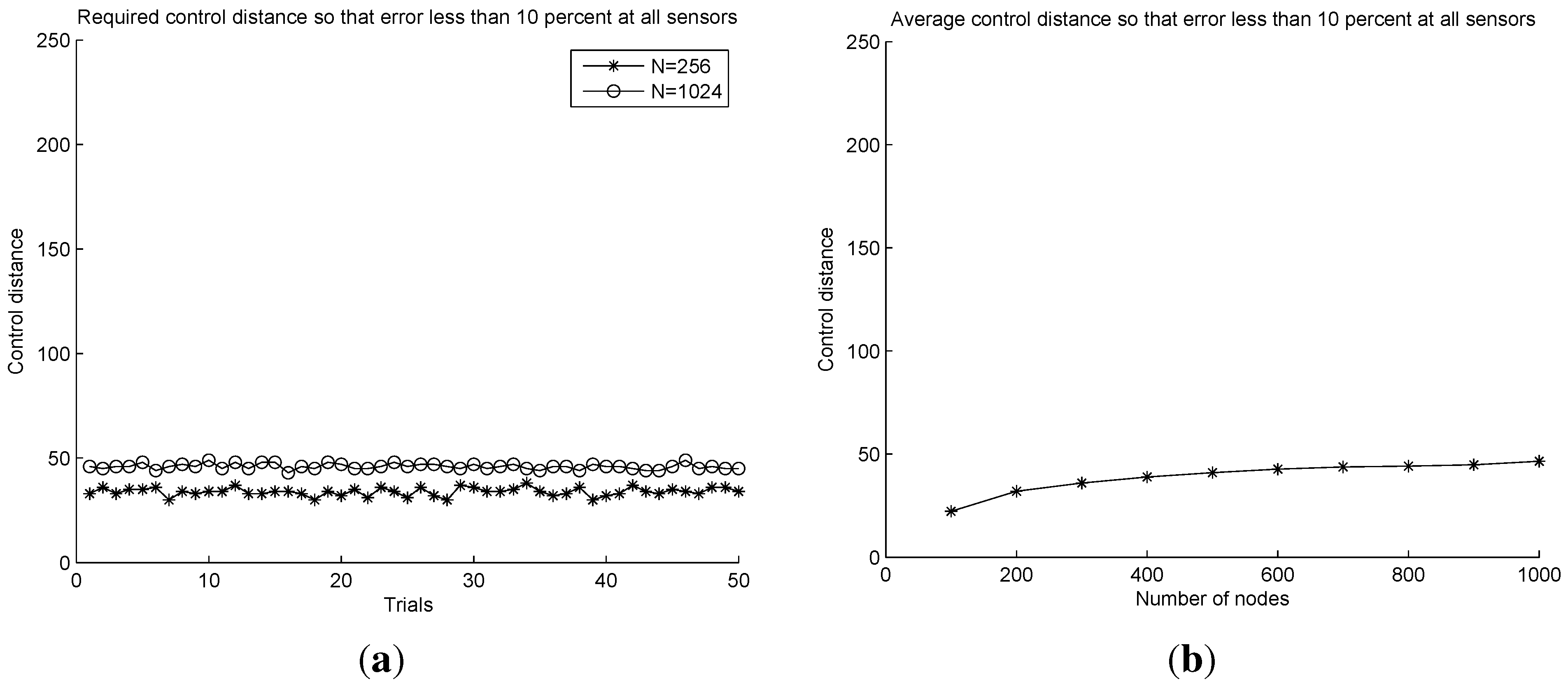
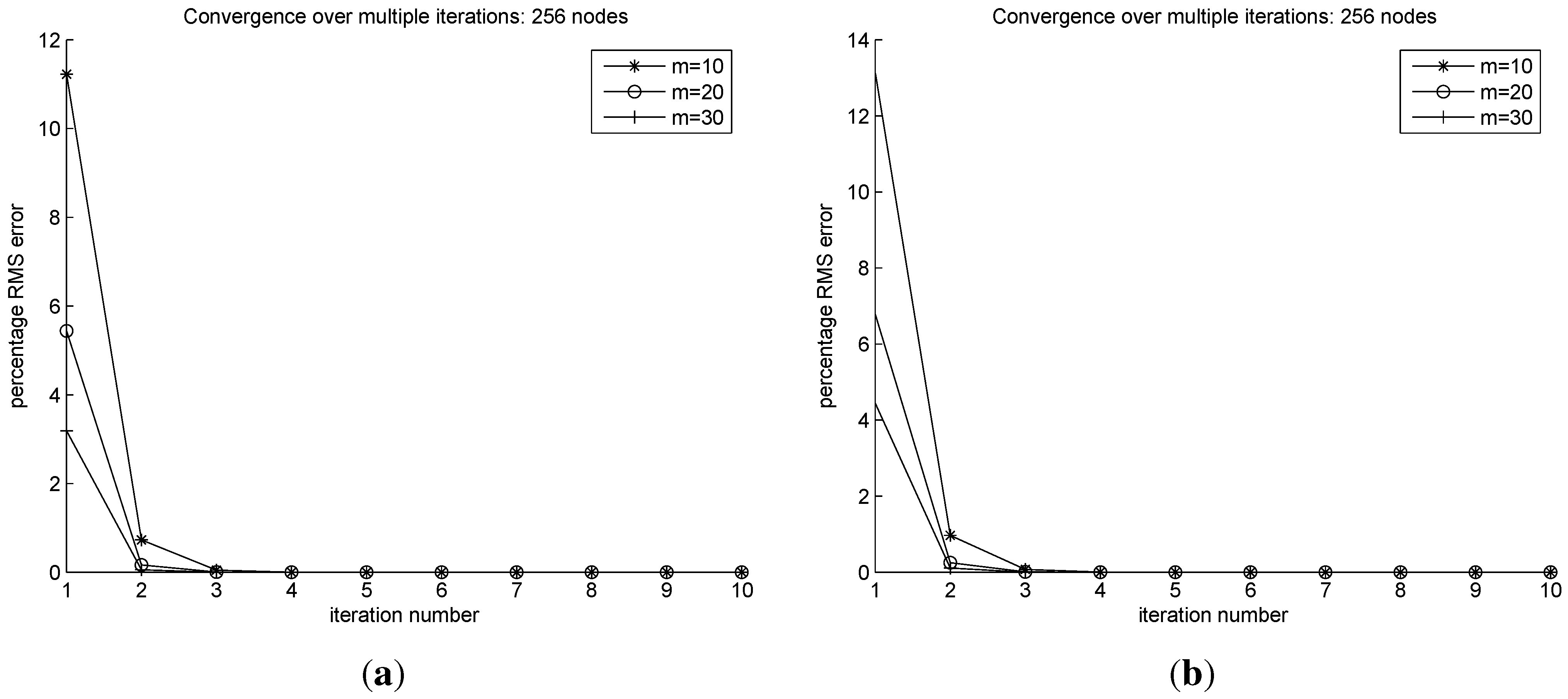
4.2. Choice of Control Distance, m, and Convergence Analysis
In this section, we discuss how the control distance,
m, can be chosen to ensure asymptotic stability, as well as fast convergence. Let E(t) denote the error in the state at time,
t, with respect to the desired state,
. Thus,
. Using Equation (
1), we have:
The convergence of the system can be verified by checking the matrix norm,
. When the matrix norm is less than one, the system is guaranteed to converge. When
is approximated by equating coefficients beyond distance,
m, from the diagonal to zero, the control distance,
m, has to be such that
. Because of the diagonally decaying characteristic of
, coefficients steadily decrease away from the diagonal, ensuring that
closely approximates
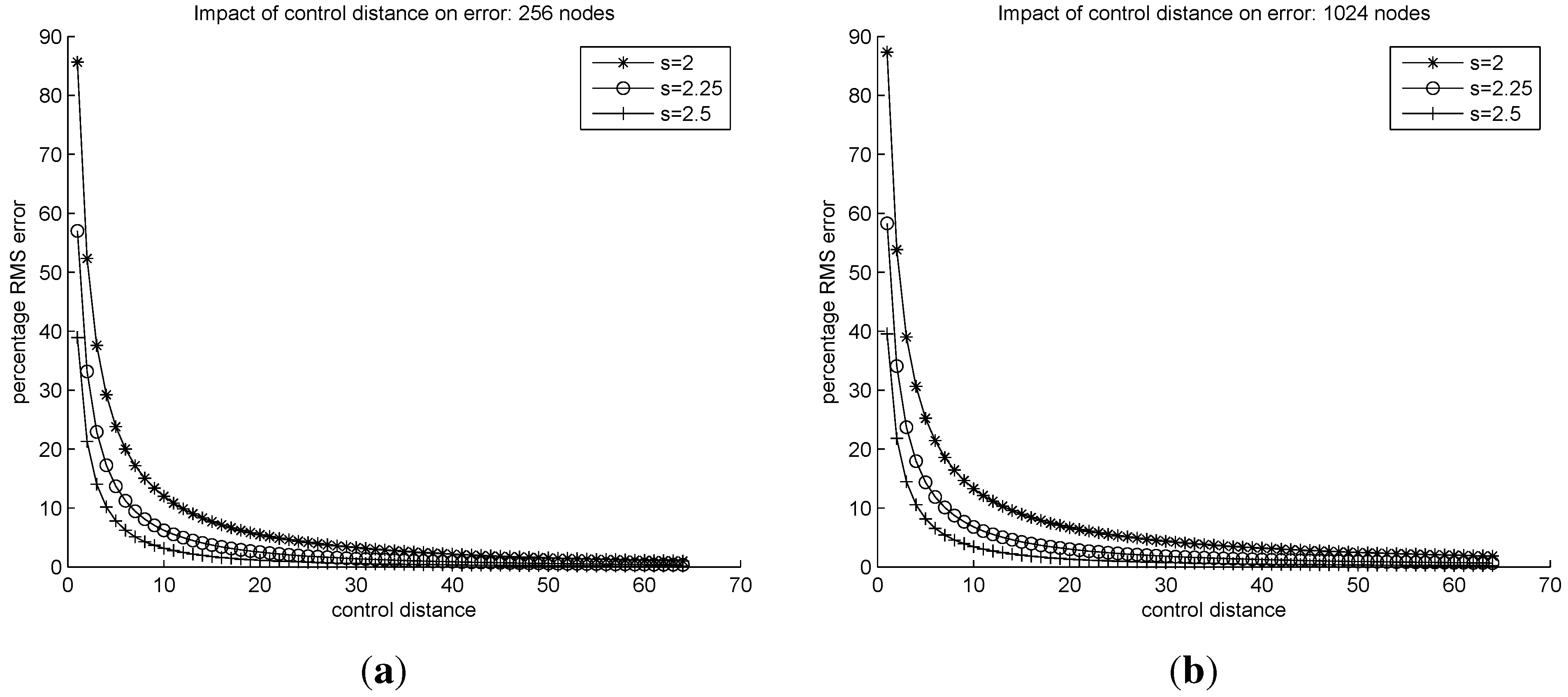
and ensuring that the matrix norm stays close to zero. In the following section, we analyze the impact of control distance on the system performance and convergence. We now note the following facts based on this analysis:
The decaying characteristic of ensures that the greater the control distance, the closer is the approximation of and . Thus, the value of m has to be at least enough to ensure that . Beyond this, the greater the control distance, the faster the convergence. However, as m increases, the burden on the underlying network to supply the required sensor information also increases, proportionately increasing the control interval. This yields a tradeoff between the control distance and convergence time.
Secondly, we note that if the matrix, B, was banded to begin with, the inverse of B is not necessarily banded, as seen by Theorem 3.1. Furthermore, the rate of decay along the diagonals may be arbitrarily low. Hence, for systems where the influence of an actuator becomes zero beyond a certain distance, f (but is not gradually decaying), the matrix, , may have large coefficients, much beyond distance, f, from the diagonal. Therefore, approximating inverse of banded matrices to yield local feedback may not result in convergence.
6. Conclusions
In this paper, we exploited the distance-sensitive decay characteristics of actuator influence matrices to identify local feedback conditions for distributed network-based control systems. Our analysis shows that when the actuator influences in a distributed control system are bounded locally and can be represented by a banded influence matrix, the computation of optimal control input may still depend on non-local information and could span a significant portion of the network. However, when the actuator influences exhibit a polynomial decay with distance, the computation of optimal control input can be approximated using information within a bounded locality. The significance of this observation is that for many of the sensor actuator network-based control applications and networked dynamical systems, it is indeed the case that the influence of an actuator decays spatially away from the actuator—nearby nodes are more affected by actions than farther ones, and this decay can be appropriately captured using polynomial decay functions. As opposed to decentralized control techniques that rely on first estimating the system state using an iterative consensus procedure and then applying a control input, the sufficiency of local feedback can result in time feedback (independent of network size) and, thus, greatly reduces the control latency.
The work in this paper provides two interesting avenues for further research. Firstly, we note that in this paper, we have focused on a relatively simple controller model to show the impact of distance decaying influence matrices. In the future, we would like to examine if the feedback matrix for optimization in the Linear Quadratic,
and
sense also exhibit a distance dependent decay. This is likely to increase the potential applications for our findings. Secondly, we would like to characterize the trade-off between the size of the control distance and the rate of applying control input. In the context of network-based control systems, there is increasing interest in studying the impact of control periods on control performance [
21,
25]. This work is not directly related with our work, but there is an indirect connection. Specifically, our results point to a tradeoff between the size of the feedback region and performance. A larger feedback region leads to better performance. However, at the same time, a larger feedback region would imply a larger control delay between two successive control input—the control period is increased. It would be interesting to study if this has an adverse effect on the performance and is a subject of our current work.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}