
A Combinatorial Model for Determining Information Loss in Organizational and Technical Systems
1
Department of Information Systems and Information Protection, Tambov State Technical University, ul. Sovetskaya 116, 392000 Tambov, Russia
2
EDB LEMZ of Public Joint Stock Company “Scientific and Production Association Named after Academician A. A. Raspletin”, Territorially Separate Division (TOD) “LEMZ”, 127411 Moscow, Russia
*
Author to whom correspondence should be addressed.
Mathematics 2022, 10(19), 3448; https://doi.org/10.3390/math10193448
Submission received: 20 June 2022
/
Revised: 12 August 2022
/
Accepted: 22 August 2022
/
Published: 22 September 2022
(This article belongs to the Special Issue Nonlinear Dynamics Systems with Hysteresis)
Abstract
:A combinatorial model is proposed for determining the probability and information losses in an organizational and technical system (OTS) under destructive external influences. Mathematical expressions are obtained to determine the loss of information in the clusters of the control system. It is shown that the use of this model for a quantitative analysis of the probability of occurrence of events and information losses in the control system, under varying external influences on the dynamic OTS, makes it possible to carry out a quantitative analysis and synthesis of the structure of the control system that is resistant to destructive external influences. A decomposition of the probabilities of occurrence of events and the corresponding loss of information by the levels of the hierarchy of the analyzed air traffic control system is presented. The achieved result is due to the sensitivity of the model for determining information losses relative to changes in the structure of the system and destructive external influences, as well as the use of the mathematical apparatus in combinatorial analyses.
Keywords:
information loss; combinatorial model; organizational and technical system; destructive influences; system analysisMSC:
68R011. Introduction
The process of analyzing complex control systems is associated with the problem of completeness of its description model, which would allow one to obtain a sufficient idea of the system under study and identify and reproduce the actual features of its functioning. The organizational and technical system implements its functioning through a system of managing the objects that are part of it.
A complex dynamic system cannot be represented by a single model—an entire hierarchy of models is needed, which will differ in the level of displayed events. As a rule, four main gradations of levels are used [1,2]:
- The level of the system as a whole;
- The level of subsystems functionally included in the system;
- The level of control units and executive bodies;
- The level of individual elements of nodes, for example, information converters (people, machines, and algorithms).
The approaches presented in [1,2,3,4,5,6,7] for constructing models of complex dynamical systems have a number of disadvantages. For example, in [4,7], the presented approach to building a model is applicable only in the case of the availability of statistical data on the functioning of the system and does not take into account the information component of the processes in the system. The papers [1,2,3,5,6] also do not consider issues related to the assessment of information losses in the system due to external destructive influences. Therefore, we proposed an informational approach for the construction of the combinatorial model for determining information loss in organizational and technical systems.
In accordance with the information approach, the system under study in the most abstract form can be represented by a hierarchical structure at the lower level of which there are control objects, executive bodies, and sensors and at higher levels there are control nodes connected with control objects by communication channels. The examples of such an organizational and technical system include air-traffic control systems, a system for protecting information from leakage through various channels in the organization, resource supply management systems, etc.
The information circulating in the system usually manifests itself in three forms:
- An information moving mainly from control objects to the corresponding control units;
- A manager for information moving in the opposite direction;
To solve the problem of system analysis, the behavior model of the object management system has been developed, abstracting to a combinatorial representation of the number of options for the interaction of system objects with a destructive external environment. Note that for each level of the control system, there are characteristic features due to links between its nodes, which must be taken into account when building a model.
The model realization consists the following steps:
- 1.
- Determination of the set of initial parameters for solving a specific problem in determining the amount of information loss in the control system (for a given quantitative effect on the nodes of the system);
- 2.
- Classification of adverse effects with the nodes of the object control system;
- 3.
- Determination of the area of admissible values of the parameters of information loss in the event of an unfavorable situation;
- 4.
- Formation of rules for determining the amount of information loss in the clusters of the control system;
- 5.
- Iteration of calculations until the combinations of random numbers corresponding to the number of actions and elements of the control system are exhausted.
The developed model allows the formation of rules for determining the amount of information loss in the clusters of the control system.
2. Statement of the Research Problem and Development of a Combinatorial Model
A complex control system in the form of a set of heterogeneous objects and relationships between them is presented as a set of directed graphs acting in order to timely introduce control actions from the source of information to the consumer under conditions of uncertainty in functions caused by destructive external influences, while in the system, there is damage that is critical in terms of ensuring the fulfillment of tasks as intended.
Determining and evaluating the state of functioning of the existing control system are required in order to develop a model for determining the probability and magnitude of information losses in this system.
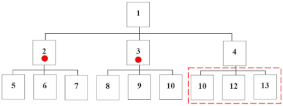
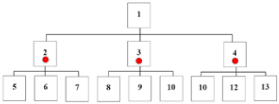
The essence of the model for determining the probability and value of information losses in the control system under uncertainty is that the process of interaction between the control system and the external environment is represented by specifying linked sets of nodes at various levels of the hierarchy (source nodes, transit nodes, and consumer nodes), a set of absorbed nodes, in accordance with the hierarchy of connections in the control system, and the number of destructive influences (Figure 1 and Figure 2).
We will describe the interaction between the objects of the control system and the external environment using expressions of combinatorial analysis [4,10,11] and represent it as a model defined by a pair of unordered sets—a set of variable parameters (nodes of the control system and connections between them, as well as destructive effects) and a set of relations connecting the values of these variables:
where U—total nodes; —the number of second-level nodes involved in the combination; —number of nodes at the third level, total; —number of destructive influences; —number of absorbed nodes; —the number of nodes of the lower level of the control system participating in the combination.
The ratio of each constituent element of expression (1) to the total amount allows the obtainment of the probability of an event occurring:
where —the probability of hitting nodes at the first level; —the probability of hitting nodes at the third level; —the probability of defeat with a combination of nodes of the second and third levels.
Based on the fact that each combination of nodes that have been subjected to a destructive impact represents information losses determined by the weight of each node and the hierarchy of building a control system, we define information losses as follows:
where —information losses from the defeat of first-level nodes; —information losses from the defeat of third-level nodes; —information loss from a combination of nodes of the second and third levels.
Consistent applications of expressions (1)–(3) render it possible to obtain the distribution of probabilities and information loss by levels of the control system. Expressions (1)–(3) are obtained to determine the numerical values of the probabilities and information losses for a control system of 3 levels, 13 nodes, and 13 influences. The obtained numerical values of P and E, as well as the dynamics of their changes, make it possible to judge the quantitative potential and directions for modernizing the control system to achieve the desired result.
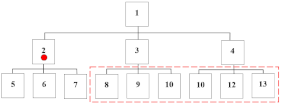
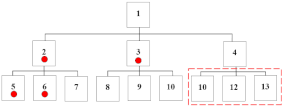
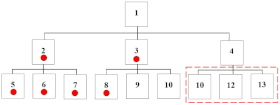
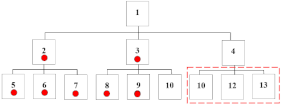
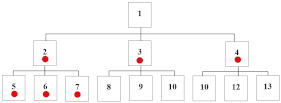
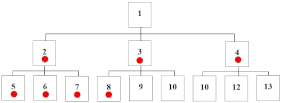
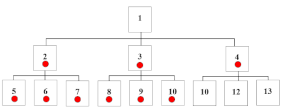
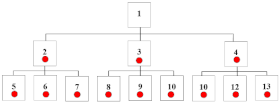
Taking into account the hierarchy (absorptions), the procedure for clustering elements of the control system is presented in Table 1, Table 2 and Table 3 and consists in sequentially determining the set of nodes in the case of damage from 1 to 3 nodes of the second level of the control system with simultaneous damage from 1 to 9 nodes of the third level and the corresponding absorption of subordinate nodes [5].
The classification of combinations of nodes and levels of the control presented in the tables provide a visual representation of the levels of nodes subjected to destructive effects and their numbers in the level of control.
The clustering process presented in Table 1 to determine the probability of hitting nodes and information loss by levels of the hierarchy of the control system is implemented using the following expressions (4)–(12):
where
- —the number of affected objects of the control system;
- —number of absorbed nodes of the third level of the control system;
- = 1, 2, 3—the number of affected nodes of the second level;
- —number of nodes of the third level.
Furthermore, the influence of destructive influences on various elements of the system control levels is considered.
In the course of the study, mathematical expressions (5)–(10) were obtained for the number of combinations during absorption at the i-th node of the n-th level with k destructive effects on the control system.
The number of combinations in the case of absorptions at the first node of the second level and 13 destructive effects on the control system is determined by the following expressions.
The number of combinations in the absorption of two nodes of the second level and 13 destructive effects on the control system can be defined as follows.
The number of combinations in the absorption of three nodes of the second level and 13 destructive effects on the control system is calculated in accordance with the following expressions:
where
- —the number of affected objects of the control system;
- —number of absorbed nodes of the third level of the control system;
- = 1, 2, 3—the number of affected nodes of the second level;
- —number of nodes of the third level.
Expressions (5)–(10) make it possible to evaluate the system’s ability to perform functional tasks with a given number of destructive effects on various nodes of different control levels.
The normalization expression for determining the probability is as follows.
Hence, the loss of information is determined using the following expression.
3. Simulation Results
The computational experiment was carried out using the Mathlab 2020b package. The results of the experiment were obtained for a control system of 13 elements located at three hierarchical levels.
As a result of the computational experiment, a curve was obtained that reflects the information losses of the system under study depending on the number of destructive influences (Figure 3). Taking the obtained values of information loss as the upper bound and the loss of information for the control system presented in the form of a fully connected graph as the lower bound, we obtain the area of admissible decisions on the modernization of the control system.
The final phase and the result of the model developing is the decomposition (Figure 4 and Figure 5) of the values of the damage probability and loss of information between the levels of the control system hierarchy [6].
Thus, the above dependences (Figure 4 and Figure 5) allow one to obtain a general idea of the probabilities and losses of the system with a different number of destructive influences and provide the degree of model decomposition to the level of the control system’s hierarchy.
It can be seen that the values of probability and information loss have similar dynamics depending on the number of affected nodes; however, the quantitative indicators of losses do not coincide with the probability, which is the basis for excluding the probability values from the analysis of the information loss characteristics of the organizational and technical system, which was noted in a number of studies [12,13,14,15,16,17,18,19].
Thus, the reaction of systems to destructive influences applied to them depends, among other things, on their current state, and the dynamics of the system over a time interval is largely determined by its prehistory. This behavior of the system is close to the phenomena of systemic hysteresis described in the literature [20,21,22].
The use of the combinatorial model given in the article, in contrast to the models described in [1,2,3,4,5,6,7] and others, develops a set-theoretic representation of systems for solving problems related to the study of the functioning of systems under destructive conditions and external influences, namely with the minimization of information losses in the system. The presented model, in our opinion, is invariant to the subject area, since it uses only a multiple representation of the structure, which is not directly related to the functionality of the system.
An example of the application of the model for determining information losses can be a change in the structure of air-traffic management in the Russian Federation.
Until 2021, the structure of the operational bodies of the unified air-traffic management (ATM) system was a four-level structure, including the main, zonal, district, and airfield control centers [23]. This structure is shown in Figure 6.
A transition from a four-level structure of interaction between the operational bodies of the Unified System (ATM main center–ATM zone center–ATM area center–ATM airfield control center) to a three-level interaction (ATM main center–ATM regional center–ATM airfield control center) was carried out, among other things, in order to reduce the load on the centers of the Unified System when coordinating activities for the use of airspace by reducing the volume of transmitted and coordinated information [23].
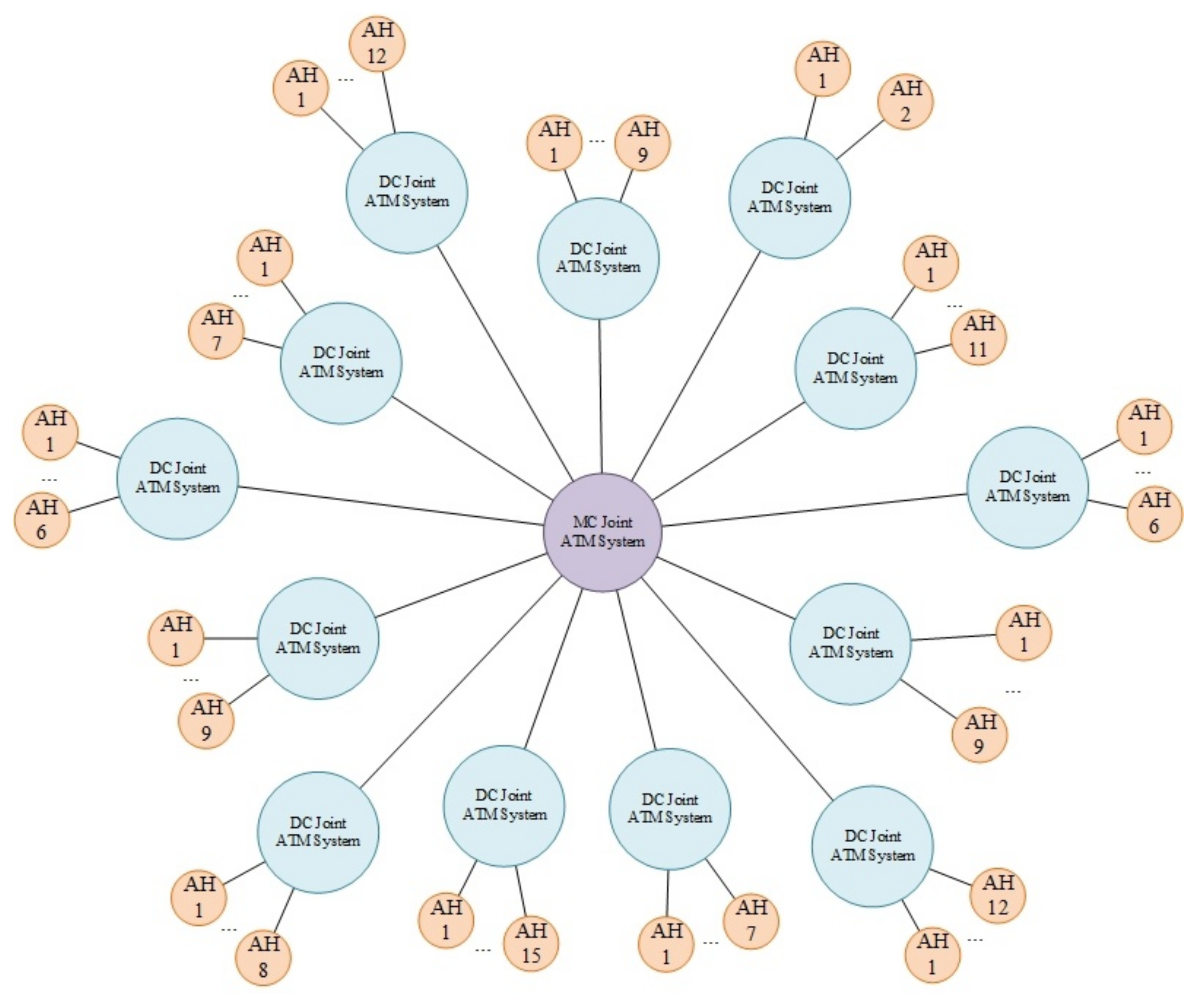
The new structure of the operational bodies of the unified ATM system is shown in Figure 7.
For the four- and three-level structures of the operational units of the unified ATM system, studies were carried out to assess information losses using the proposed combinatorial model.
Added concrete results of the analysis of comparative modeling of two structures.
The analysis of the above structures of the ATM system based on the proposed model showed a decrease in information losses when exposed to the same destructive effects on the nodes and communications connecting them, and a reliability factor of 0.92 by 14% was observed (with normalized values of information losses: for structure 1—0.321, for structure 2—0.276).
The results of the study led to the conclusion that to modernize the control system in order to reduce information losses by forming additional links or adding nodes, it is necessary to decompose the probabilities and information losses to the level of the control-system object (node).
4. Conclusions
The above results showed that the combinatorial approach to assessing information loss under destructive external influences on the control system makes it possible to build effective models for the analysis and synthesis of the structure of hierarchical control systems. The results obtained using the combinatorial model make it possible to determine the direction of modifying the structure of the control system to increase its resistance relative to destructive external influences. A further direction of research is seen in the development of a combinatorial approach for the study of systems in other subject areas (gas transportation, oil production, etc.). For example, the application of a combinatorial approach to the analysis of the gas distribution system of the region revealed shortcomings in the structure and a number of hierarchical relationships of gas distribution substations. A similar approach applied to software testing made it possible to find critical sections of the program code and determine ways to bypass them. In addition, the proposed approach to the analysis of the structure makes it possible to improve system properties such as survivability and resistance to destructive external influences.
Author Contributions
Data curation, M.V.V.; Investigation, M.V.V.; Methodology, A.V.Y. and V.V.A.; Resources, S.V.P.; Validation, S.V.P. All authors have read and agreed to the published version of the manuscript.
Funding
The reported study was funded by RFBR for research project No. 20-37-90146.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Dogančić, B.; Jokić, M.; Alujević, N.; Wolf, H. Structure Preserving Uncertainty Modelling and Robustness Analysis for Spatially Distributed Dissipative Dynamical Systems. Mathematics 2022, 10, 2125. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, H.; Chang, C.; Lu, H. Intrinsic Correlation with Betweenness Centrality and Distribution of Shortest Paths. Mathematics 2022, 10, 2521. [Google Scholar] [CrossRef]
- Castaneda, J.; Martin, X.A.; Ammouriova, M.; Panadero, J.; Juan, A.A. A Fuzzy Simheuristic for the Permutation Flow Shop Problem under Stochastic and Fuzzy Uncertainty. Mathematics 2022, 10, 1769. [Google Scholar] [CrossRef]
- Fleishman, B.S. Elements of the Theory of Potential Efficiency of Complex Systems, 1st ed.; Soviet Radio: Moscow, Russia, 1971. [Google Scholar]
- Mazalov, A.N.; Yakovlev, A.V.; Alekseev, V.V.; Gaidashov, I.S. Mathematical model for optimizing distributed information systems. J. Phys. Conf. Ser. 2020, 1679, 022100. [Google Scholar] [CrossRef]
- Chen, T.; Li, S.; Yang, C.-M.; Deng, W. Developing an Enterprise Diagnostic Index System Based on Interval-Valued Hesitant Fuzzy Clustering. Mathematics 2022, 10, 2440. [Google Scholar] [CrossRef]
- Houankpo, H.G.K.; Kozyrev, D. Mathematical and Simulation Model for Reliability Analysis of a Heterogeneous Redundant Data Transmission System. Mathematics 2021, 9, 2884. [Google Scholar] [CrossRef]
- Pechenkin, A.V.; Rykov, V.V. On the Decomposition of Closed Networks with Dependent Maintenance. Autom. Telemech. 1999, 11, 58–69. (In Russian) [Google Scholar]
- Xie, L.; Wu, N.; Wang, Z. Information loss in failure probability calculation and system-level modeling approach. Control. Eng. Appl. Inform. 2007, 10, 277–283. [Google Scholar]
- Barbarani, V. Combinatorial Models of the Distribution of Prime Numbers. Mathematics 2021, 9, 1224. [Google Scholar] [CrossRef]
- Alekseev, V.V.; Yakovlev, A.V.; Aminova, F.E.; Sergeev, M.J. The study of the complex information systems structure on the coefficient of structural uncertainty basis. J. Phys. Conf. Ser. 2019, 1399, 033121. [Google Scholar] [CrossRef]
- Chen, K.; Zhao, X.; Qiu, Q. Optimal Task Abort and Maintenance Policies Considering Time Redundancy. Mathematics 2022, 10, 1360. [Google Scholar] [CrossRef]
- Tsai, T.-R.; Lio, Y.; Xin, H.; Pham, H. Parameter Estimation for Composite Dynamical Systems Based on Sequential Order Statistics from Burr Type XII Mixture Distribution. Mathematics 2021, 9, 810. [Google Scholar] [CrossRef]
- Liu, B.; Zhao, Y.Q. Tail Asymptotics for a Retrial Queue with Bernoulli Schedule. Mathematics 2022, 10, 2799. [Google Scholar] [CrossRef]
- Peng, C.; Ma, J.; Li, Q.; Gao, S. Noise-to-State Stability in Probability for Random Complex Dynamical Systems on Networks. Mathematics 2022, 10, 2096. [Google Scholar] [CrossRef]
- Tian, M.-W.; Yan, S.-R.; Liu, J.; Alattas, K.A.; Mohammadzadeh, A.; Vu, M.T. A New Type-3 Fuzzy Logic Approach for Chaotic Systems: Robust Learning Algorithm. Mathematics 2022, 10, 2594. [Google Scholar] [CrossRef]
- Anisimov, V.G.; Anisimov, E.G.; Saurenko, T.N.; Zotova, E.A. Models of forecasting destructive influence risks for information processes in management. Inf. Control. Syst. 2019, 5, 18–23. [Google Scholar] [CrossRef]
- Alekseev, V.V.; Tsvetkov, S.O.; Khudyakov, A.P.; Emelyanov, E.V. Analysis of Approaches to Improving The Efficiency of The Use of Technical Systems Under The Influence of Negative Factors. Control of Large Systems. In Materials of the XVI All-Russian School-Conference of Young Scientists; Publishing Center of FGBOU VO “TSTU”: Tambov, Russia, 2019; pp. 397–402. (In Russian) [Google Scholar]
- Alekseev, V.V.; Korystin, S.I.; Malyshev, V.A.; Sysoev, V.V. Modeling of the Information Impact on The Ergatic Element in Ergotechnical Systems; Stensvil: Moscow, Russia, 2003. [Google Scholar]
- Semenov, M.E.; Borzunov, S.V.; Meleshenko, P.A. Stochastic Preisach Operator: Definition within the Design Approach. Nonlinear Dyn. 2020, 101, 2599–2614. [Google Scholar] [CrossRef]
- Semenov, M.E.; Solovyov, O.O.; Meleshenko, P.A.; Reshetova, O.O. Efficiency of Hysteretic Damper in Oscillating Systems. Math. Model. Nat. Phenom. 2020, 15, 58–69. [Google Scholar] [CrossRef]
- Semenov, M.E.; Reshetova, O.O.; Borzunov, S.V.; Meleshenko, P.A. Self-Oscillations in a System with Hysteresis: The Small Parameter Approach. Eur. Phys. J. Spec. Top. 2021, 230, 3565–3571. [Google Scholar] [CrossRef]
- Structure of EU ATM Centers. Available online: https://gkovd.ru/joint-atm-system/atc-centres-structure/ (accessed on 28 March 2022). (In Russian).
Figure 1.
The investigated control system of a dynamic OTS.

Figure 2.
The control system’s graph.
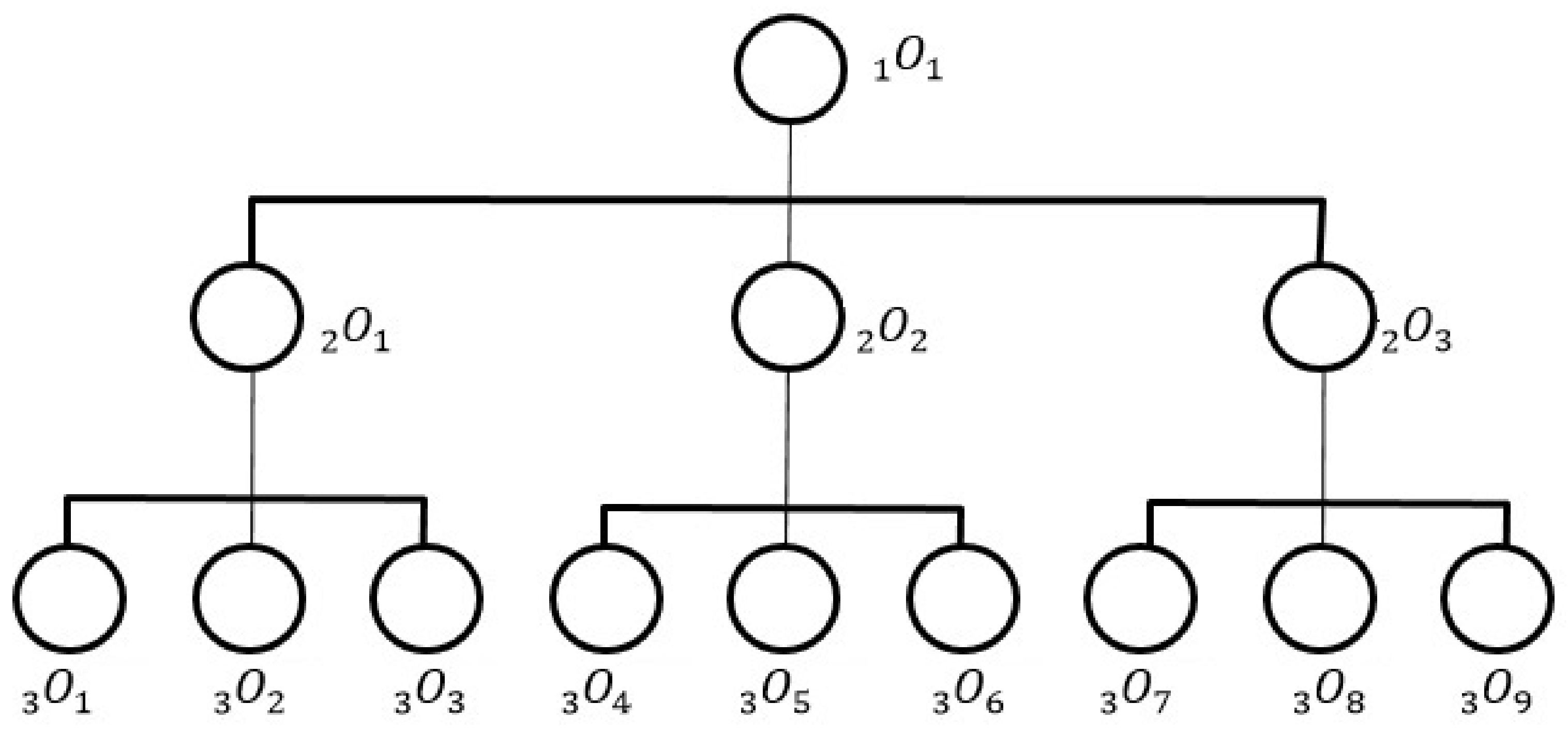
Figure 3.
The area of acceptable solutions for the modernization of the control system.
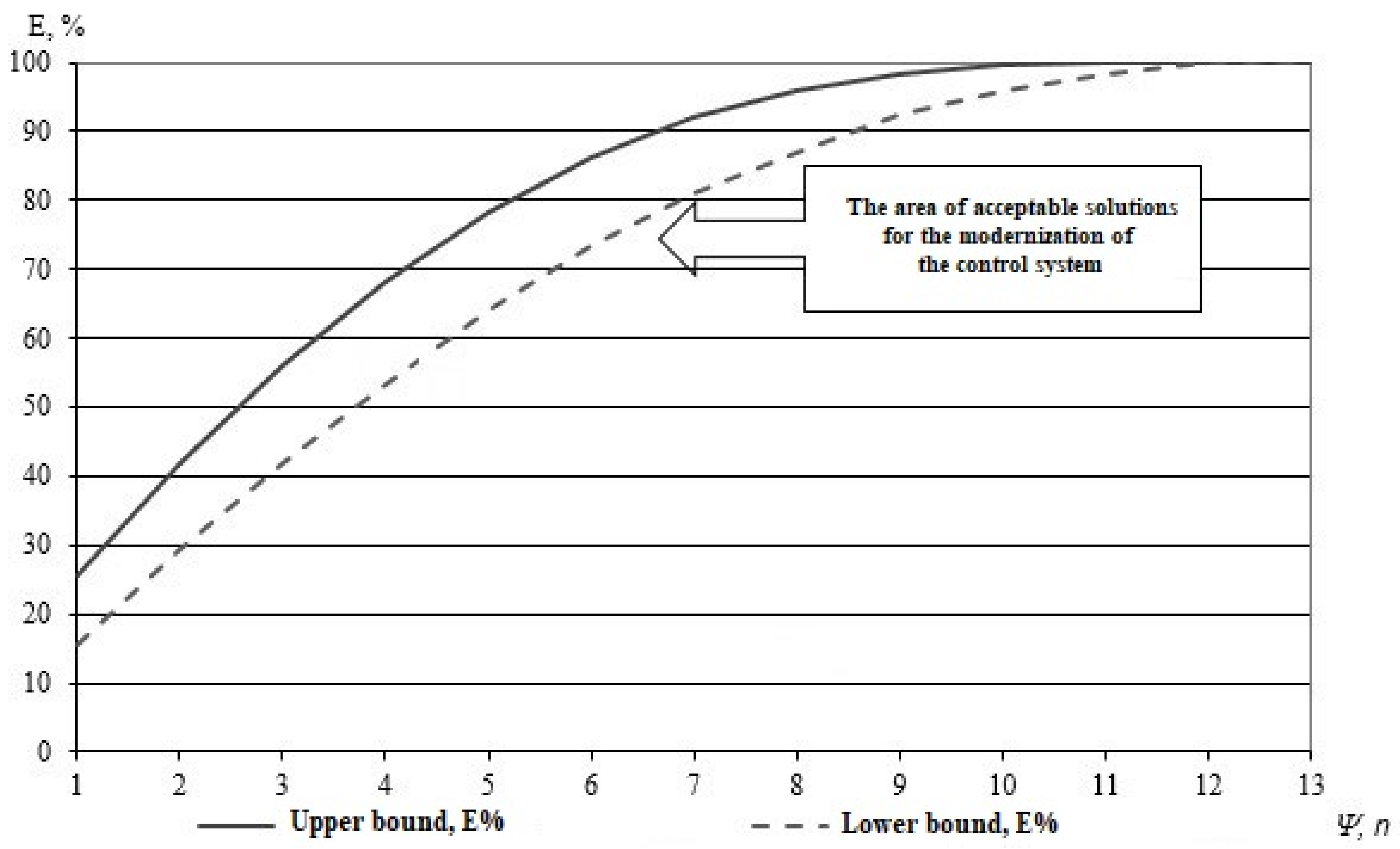
Figure 4.
Dependence of the probability of hitting the nodes (P) of the system levels on destructive influences.
Figure 4.
Dependence of the probability of hitting the nodes (P) of the system levels on destructive influences.
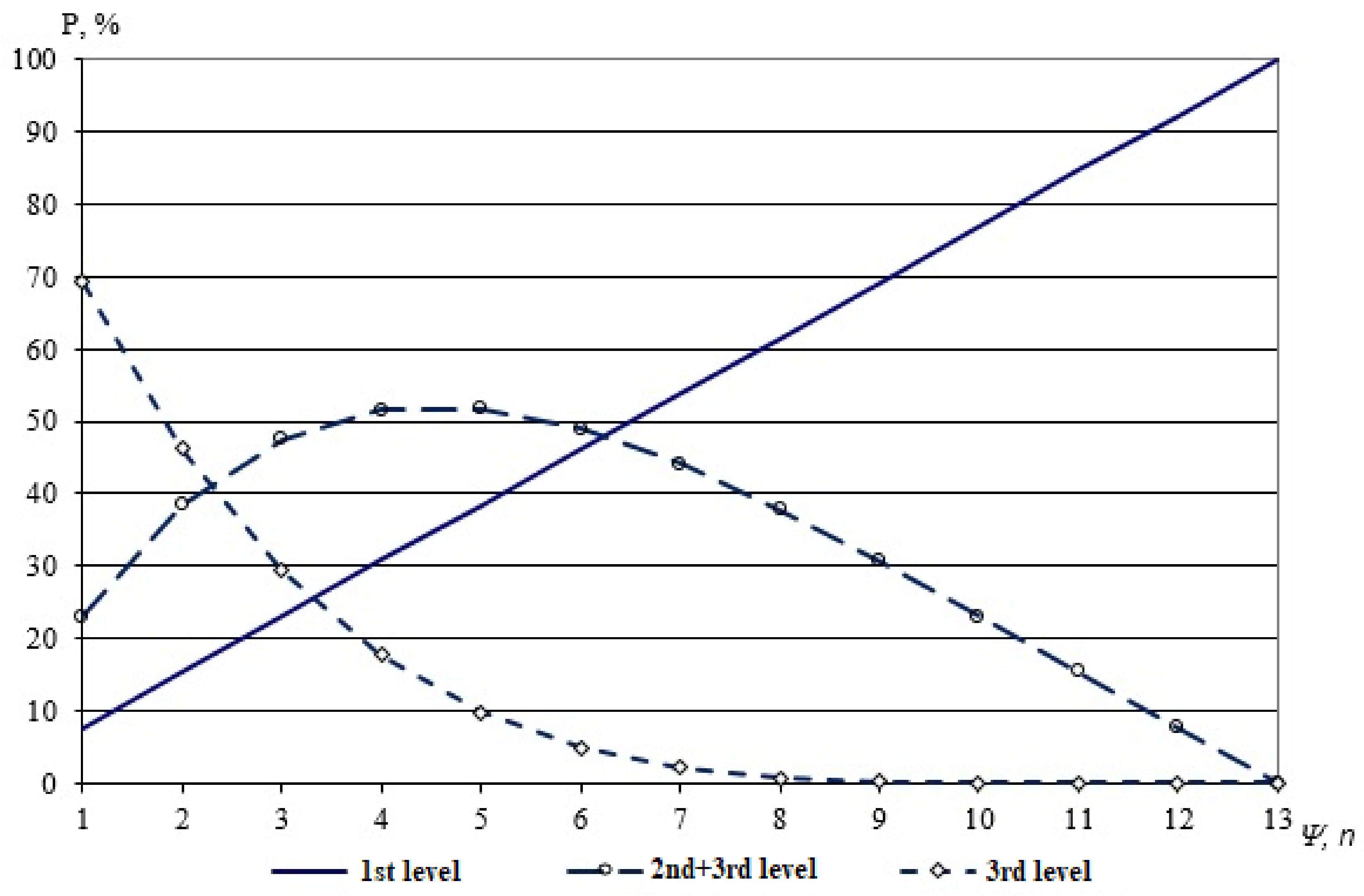
Figure 5.
Dependence of information loss (E) by system levels on destructive influences.

Figure 6.
The structure of the operational bodies of the unified ATM system until 15 June 2021.

Figure 7.
The structure of the operational bodies of the unified ATM system after 15 June 2021.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Combinations of the 2nd and 3rd levesl for absorptions at the 1st node of the 2nd level.
 |  |
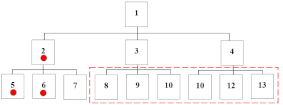 | 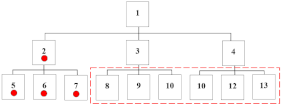 |
Table 2.
Combinations of 2nd and 3rd levels for absorptions at 2 nodes of the 2nd level.
 |  |
 |  |
 |  |
 |
Table 3.
Combinations of 2nd and 3rd levels for absorptions at 3 nodes of the 2nd level.
 |  |
 |  |
 |  |
 |  |
 |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Yakovlev, A.V.; Alekseev, V.V.; Volchikhina, M.V.; Petrenko, S.V. A Combinatorial Model for Determining Information Loss in Organizational and Technical Systems. Mathematics 2022, 10, 3448. https://doi.org/10.3390/math10193448
AMA Style
Yakovlev AV, Alekseev VV, Volchikhina MV, Petrenko SV. A Combinatorial Model for Determining Information Loss in Organizational and Technical Systems. Mathematics. 2022; 10(19):3448. https://doi.org/10.3390/math10193448
Chicago/Turabian StyleYakovlev, Alexey V., Vladimir V. Alekseev, Maria V. Volchikhina, and Sergey V. Petrenko. 2022. "A Combinatorial Model for Determining Information Loss in Organizational and Technical Systems" Mathematics 10, no. 19: 3448. https://doi.org/10.3390/math10193448
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.