
Characterization of the Mean First-Passage Time Function Subject to Advection in Annular-like Domains


{kind=link}
{kind=link}
Abstract
:1. Introduction
- (A1)
- for any ;
- (A2)
- for any .
- (B1)
- (Dirichlet) , for any z in a region ,
- (B2)
- (Robin) for any z in a region , with , b, and c given as real constants.
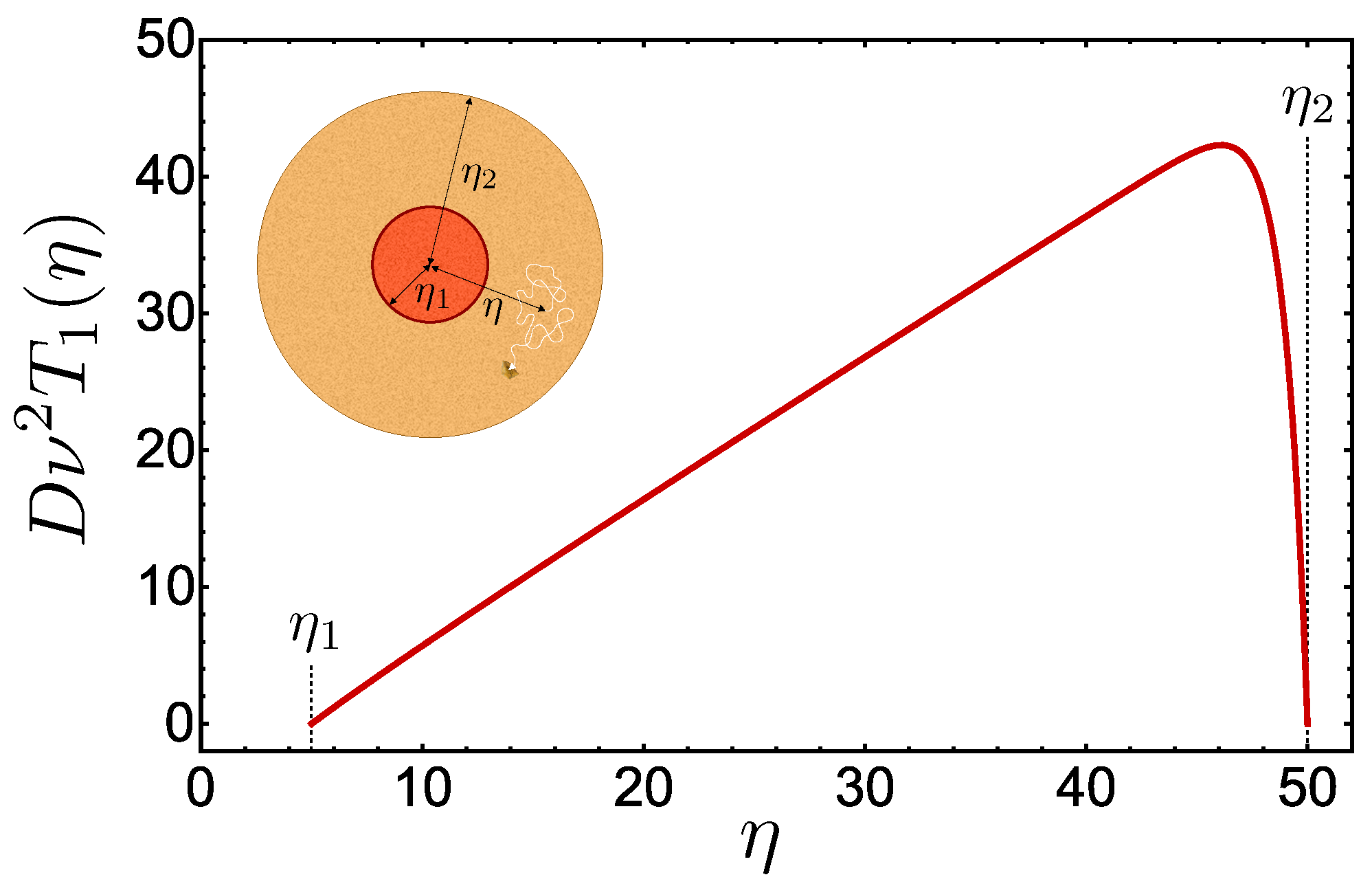
2. The MFPT Function in an Annulus
- The domain is an annulus enclosed by two concentric circles and , with radii and , respectively (), so that the boundary is formed by the union of such circles;
- The domain is enclosed by two arbitrary smooth (differentiable) curves and , which are obtained as small deformations of the previous concentric circles and , respectively.
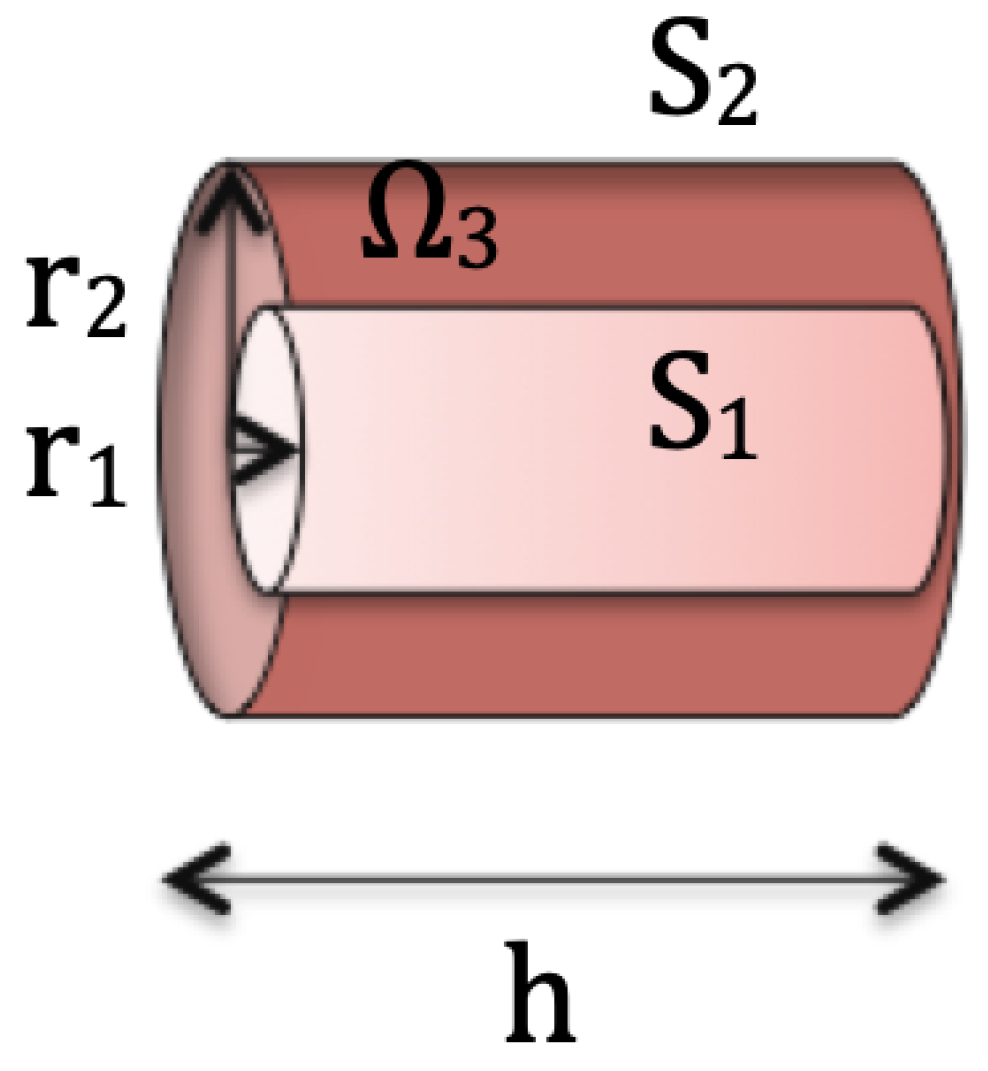
3. The MFPT Function in an Annular Cylinder
- The domain is an annular cylinder limited by two parallel and concentric cylindrical surfaces and , with radii and , respectively, with , and by two lids. Precisely, they are the finite intersections of two parallel planes (at a distance h from each other) with the cylinders and orthogonal to the axes of the latter; see Figure 2 below;
- By letting the two lids, in the previous case, be very separated from each other (as if h tends to infinity) so that they can be disregarded, the surface boundary will be supposed to be a small or moderate deformation of the two cylindrical surfaces in scenario 3.
4. Discussion
- Extensions to more general nonseparable two- and three-dimensional boundaries, which are not small deformations of the separable boundaries considered here;
- Further analysis of mixed boundary conditions on the same boundary.
5. Conclusions
- In the two-dimensional case, the domain was defined as an annulus, and the boundary was formed by either two concentric circles or by small deformations thereof;
- In the three-dimensional case, the domain was defined as an annular cylinder, and the boundary was formed by either parallel concentric cylindrical surfaces of finite length or by lengthy deformations thereof.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. The Green’s Function G vs. G||ν|=0 in Two Dimensions
Appendix B. An Approximation Method for σ3 and σ4 Close to σ1 and σ2
Appendix C. Extending the Approximation Method to Three Dimensions
- The oscillating behavior of the Bessel functions enables the four integrals to be finite at large .
- For small and , all integrals are finite.
- For small and , all integrals are finite, except the first one defining , which gives rise to a logarithmic divergence. This logarithmic divergence turns out to be harmless and to yield finite results upon performing integrations over at a later stage.
- The first integral defining and the last one defining pose ambiguities related to those met in Example 1 and in the proof of Theorem 2. In fact, by invoking the asymptotic behavior of the Bessel functions for large , the oscillating integrands in those two integrals are shown to contain contributions having, to the leading order, the same asymptotic behavior in as the oscillating integrand of the integral , with large but finite . is finite and nonvanishing for , it changes sign as does, and .An alternative argument supporting the discontinuity and, hence, the ambiguity, is the following: for , one has , with being a function related to the sine-integral function (Equation (5.2.26) in [24]). Notice that is unambiguously defined if , but (say, ) precisely for .Then, those two integrals contain contributions having different (finite and nonvanishing) values depending on the sign of . They have to be evaluated by the same “averaging” procedure. For instance, the integral has to be replaced bywith tending to 0, a procedure which cancels out the different contributions with opposite signs. And so on for the other integral.
- The third integral in and the first one in above behave in a continuous way and do not give rise to ambiguities.
References
- Chambers, A.F.; Groom, A.C.; MacDonald, I.C. Dissemination and growth of cancer cells in metastatic sites. Nat. Rev. Cancer 2002, 2, 563. [Google Scholar] [CrossRef] [PubMed]
- Pantel, K.; Brakenhoff, R.H. Dissecting the metastatic cascade. Nat. Rev. Cancer 2004, 4, 448. [Google Scholar] [CrossRef] [PubMed]
- Chaffer, C.L.; Weinberg, R.A. A perspective on cancer cell metastasis. Science 2011, 331, 1559. [Google Scholar] [CrossRef] [PubMed]
- Hanahan, D.; Weinberg, R.A. The hallmarks of cancer: The next generation. Cell 2011, 144, 646. [Google Scholar] [CrossRef] [PubMed]
- Fedotov, S.; Iomin, A. Migration and Proliferation Dichotomy in Tumor-Cell Invasion. Phys. Rev. Lett. 2007, 98, 118101. [Google Scholar] [CrossRef] [PubMed]
- Liang, L.; Norrelykke, S.F.; Cox, E.C. Persistent cell motion in the absence of external signals: A search strategy for eukaryotic cells. PloS ONE 2008, 3, 1. [Google Scholar]
- Dahlenburg, M.; Pagnini, G. Exact calculation of the mean first passage time of continuous-time random walks by nonhomogeneous Wiener-Hopf integral equations. J. Phys. A Math. Theor. 2022, 55, 505003. [Google Scholar] [CrossRef]
- Redner, S. A Guide to First-Passage Processes; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Metzler, R.; Oshanin, G.; Redner, S. First-Passage Phenomena and Their Applications; World Scientific: Singapore, 2014. [Google Scholar]
- Jacobs, K. Stochastic Processes for Physicists; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Condamin, S.; Bénichou, O.; Tejedor, V.; Voituriez, R.; Klafter, J. First-passage times in complex scale-invariant media. Nature 2007, 450, 77. [Google Scholar] [CrossRef]
- Grebenkov, D.S.; Skvortsov, A.T. Mean first-passage time to a small absorbing target in an elongated planar domain. New J. Phys. 2020, 22, 113024. [Google Scholar] [CrossRef]
- Grebenkov, D.S.; Rupprecht, J.-F. The escape problem for mortal walkers. J. Chem. Phys. 2017, 146, 084106. [Google Scholar] [CrossRef] [PubMed]
- Mangeat, M.; Rieger, H. The narrow escape problem in a circular domain with radial piecewise constant diffusivity. J. Phys. A Math. Theor. 2019, 52, 424002. [Google Scholar] [CrossRef]
- Serrano, H.; Álvarez-Estrada, R.F.; Calvo, G.F. Mean first-passage time of cell migration in confined domains. Math. Meth. Appl. Sci. 2023, 46, 7435–7453. [Google Scholar] [CrossRef]
- Risken, H. The Fokker-Planch Equation; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Hanggi, P.; Talkner, P.; Borkovec, M. Reaction-rate theory: Fifty years after Kramers. Rev. Mod. Phys. 1990, 62, 251. [Google Scholar] [CrossRef]
- Durand, E. Electrostatique et Magnetostatique; Masson: Paris, France, 1953. [Google Scholar]
- Morse, P.M.; Feshbach, H. Methods of Theoretical Physics. Part I and Part II; McGrawHill: New York, NY, USA, 1953. [Google Scholar]
- Kellogg, O.D. Foundations of Potential Theory; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1967; Chapter 11. [Google Scholar]
- Balian, R.; Bloch, C. Distribution of Eigenfrequencies for the Wave Equation in a Finite Domain I. Three-Dimensional Problem with Smooth Boundary Surface. Ann. Phys. 1970, 60, 401–447. [Google Scholar] [CrossRef]
- Singh, R.; Wazwaz, A.-M. An Efficient Method for Solving the Generalized Thomas-Fermi and Lane-Emden-Fowler Type Equations with Nonlocal Integral Type Boundary Conditions. Int. J. Appl. Comput. Math. 2022, 8, 68. [Google Scholar] [CrossRef]
- Lovitt, W.V. Linear Integral Equations; Dover Publications Inc.: Mineola, NY, USA, 1950. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs and Mathematical Tables; National Bureau of Standards Applied Mathematics Series: Washington, DC, USA, 1964; Volume 55. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serrano, H.; Álvarez-Estrada, R.F. Characterization of the Mean First-Passage Time Function Subject to Advection in Annular-like Domains. Mathematics 2023, 11, 4998. https://doi.org/10.3390/math11244998
Serrano H, Álvarez-Estrada RF. Characterization of the Mean First-Passage Time Function Subject to Advection in Annular-like Domains. Mathematics. 2023; 11(24):4998. https://doi.org/10.3390/math11244998
Chicago/Turabian StyleSerrano, Hélia, and Ramón F. Álvarez-Estrada. 2023. "Characterization of the Mean First-Passage Time Function Subject to Advection in Annular-like Domains" Mathematics 11, no. 24: 4998. https://doi.org/10.3390/math11244998
APA StyleSerrano, H., & Álvarez-Estrada, R. F. (2023). Characterization of the Mean First-Passage Time Function Subject to Advection in Annular-like Domains. Mathematics, 11(24), 4998. https://doi.org/10.3390/math11244998