

Investigation of Warning Thresholds for the Deformation of GINA Gasket of Immersed Tunnel Based on a Material-to-Mechanical Analysis

Abstract
:1. Introduction
2. Immersed Tunnel Joint and GINA Gasket
2.1. Overview of Immersed Tunnel Joint
2.2. GINA Gasket
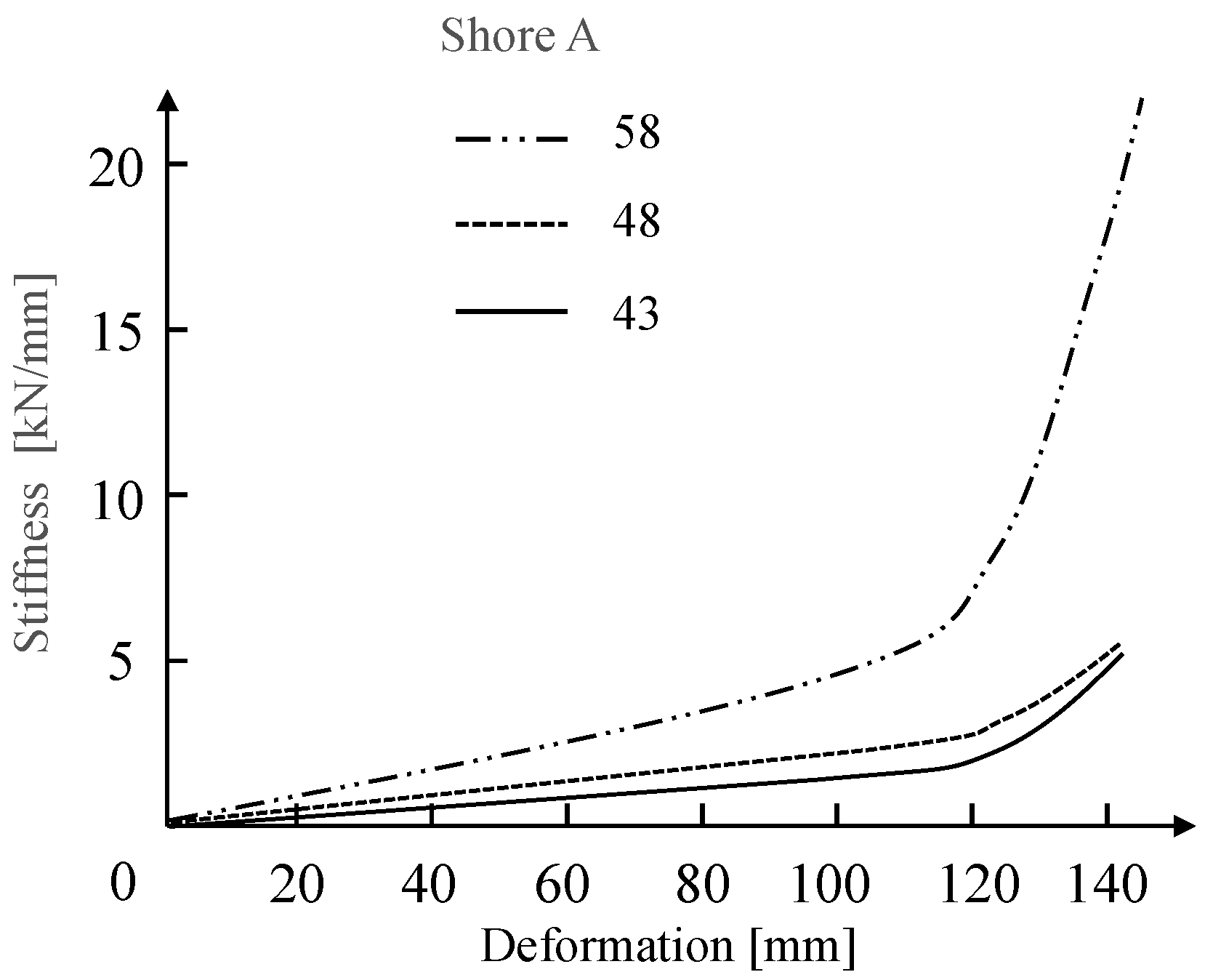
2.2.1. The Rubber Hardness of the GINA Gasket
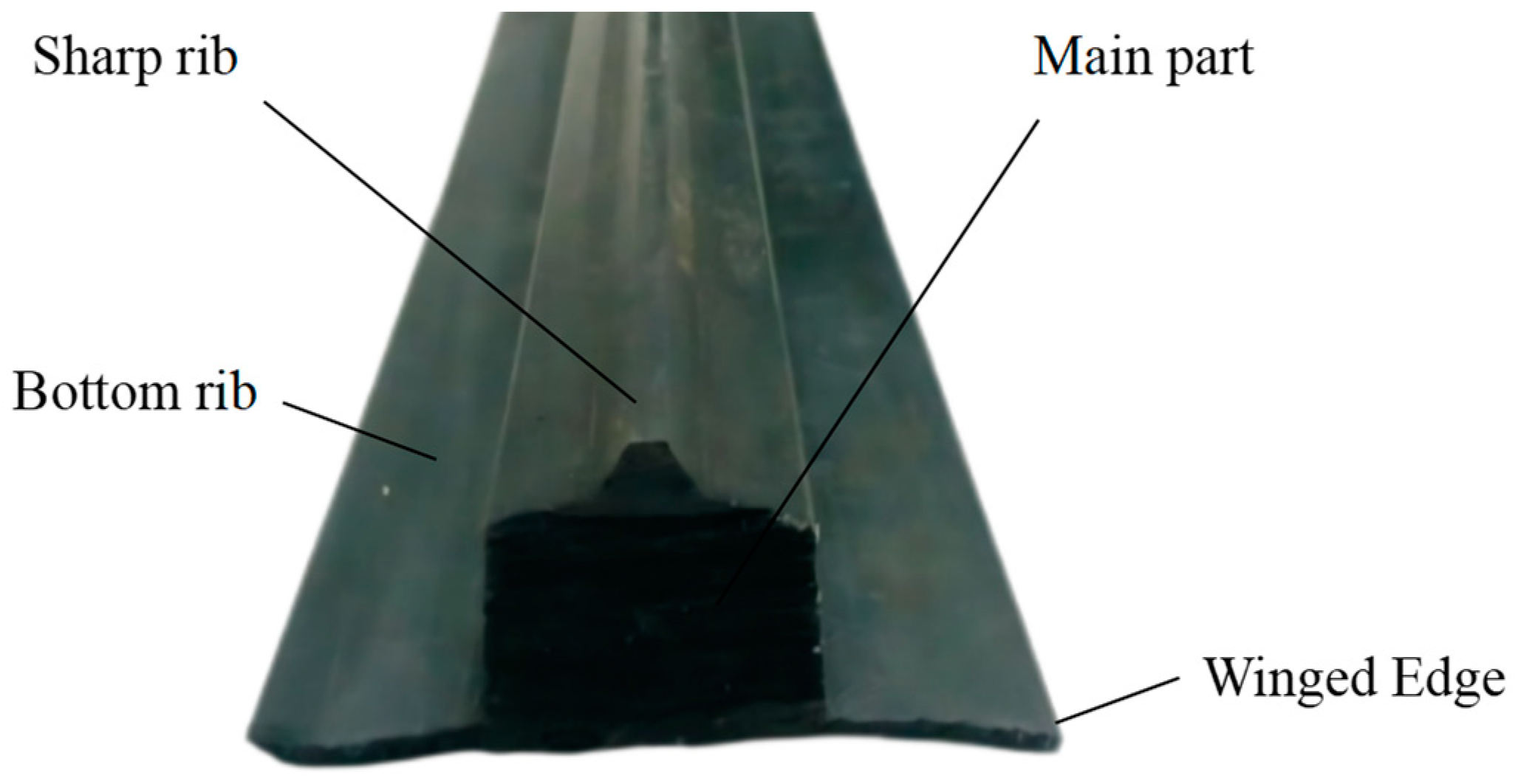
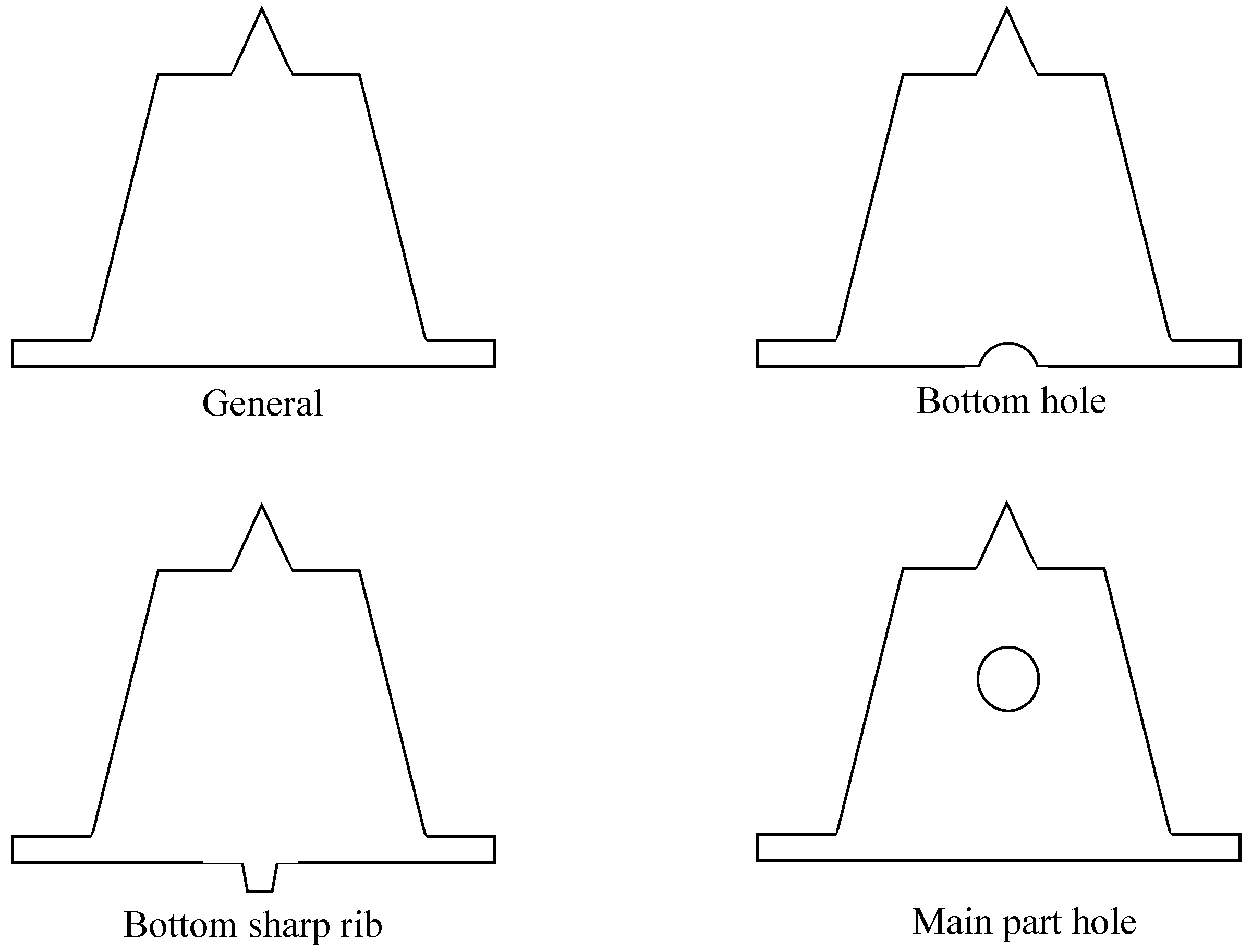
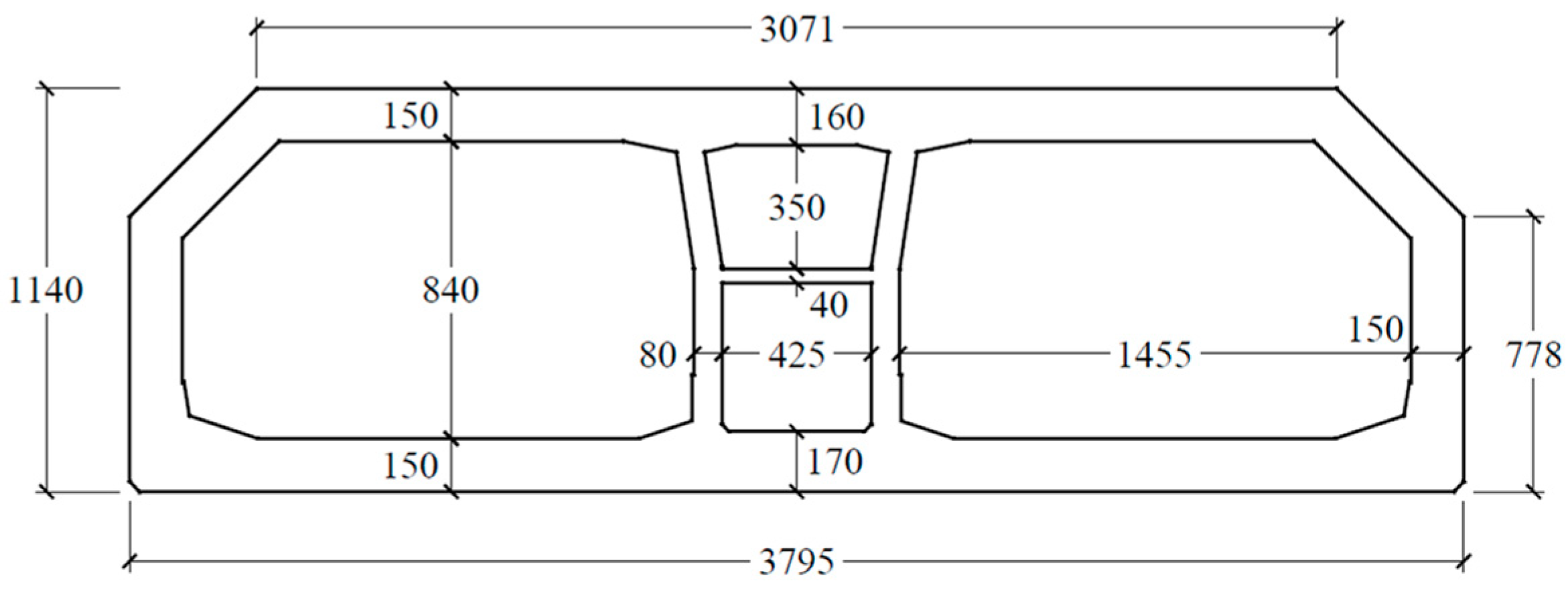
2.2.2. The Cross-Sectional Shapes of GINA Gasket
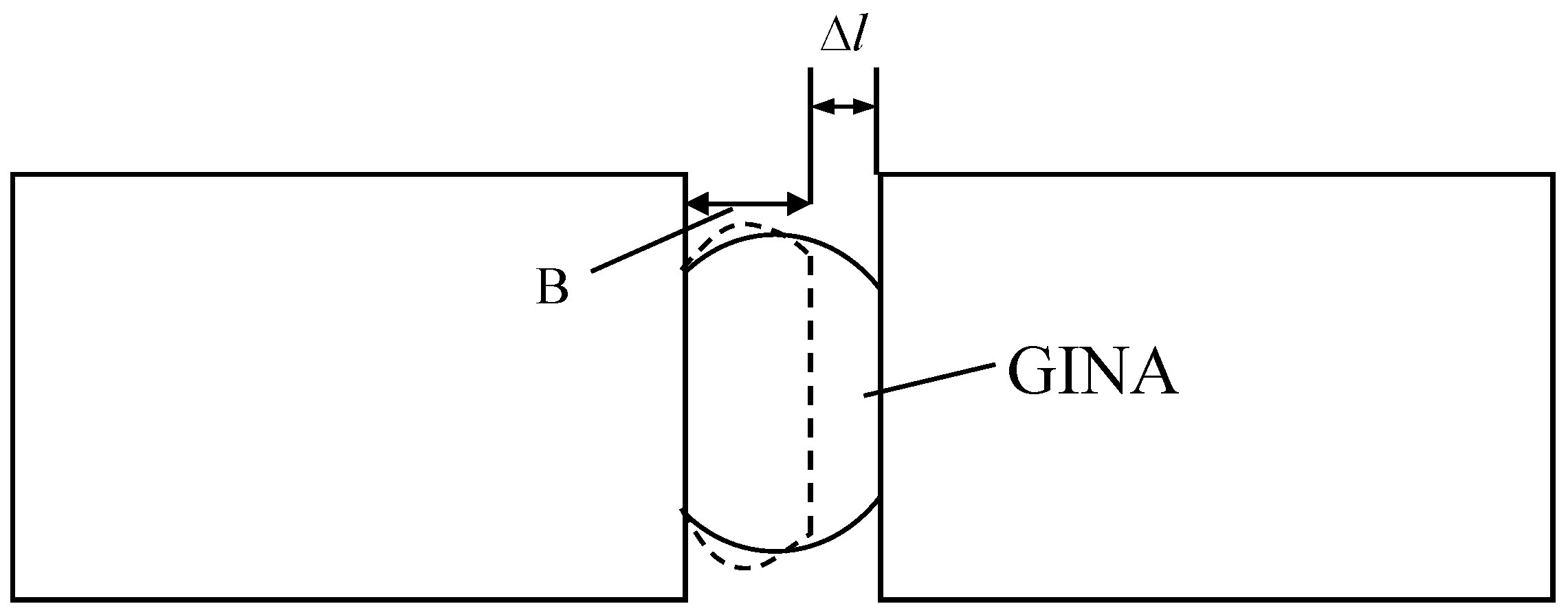
3. Deformation of GINA Gasket
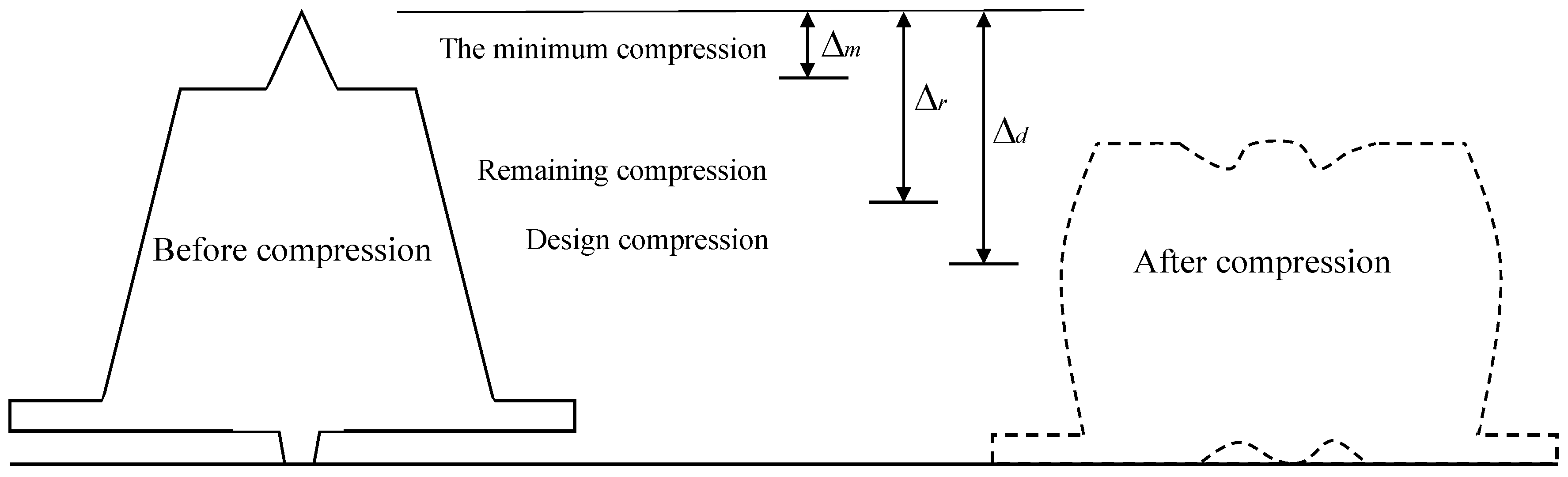
3.1. The Compression of GINA Gasket
3.1.1. The Minimum Compression of GINA Gasket
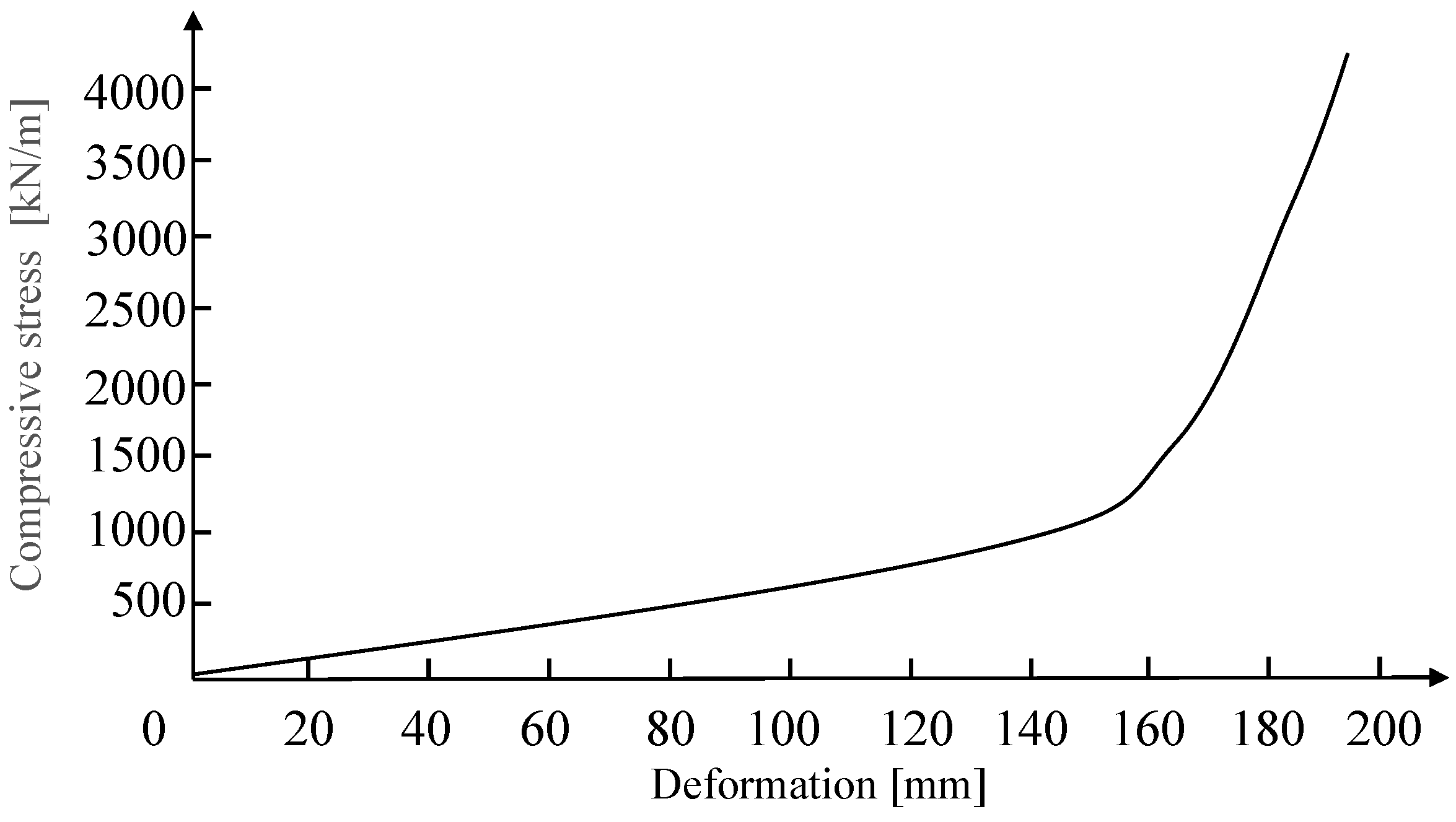
3.1.2. The Compression Characteristic of GINA Gasket
3.2. Deformation Modes and Computation Model
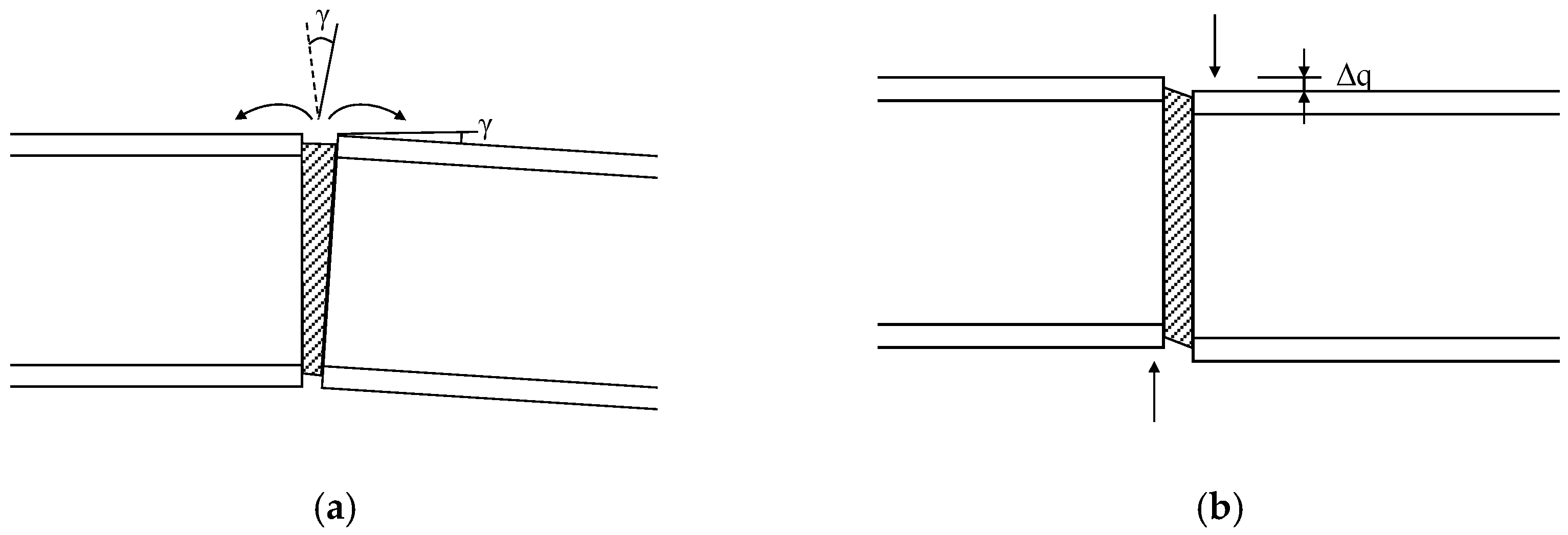
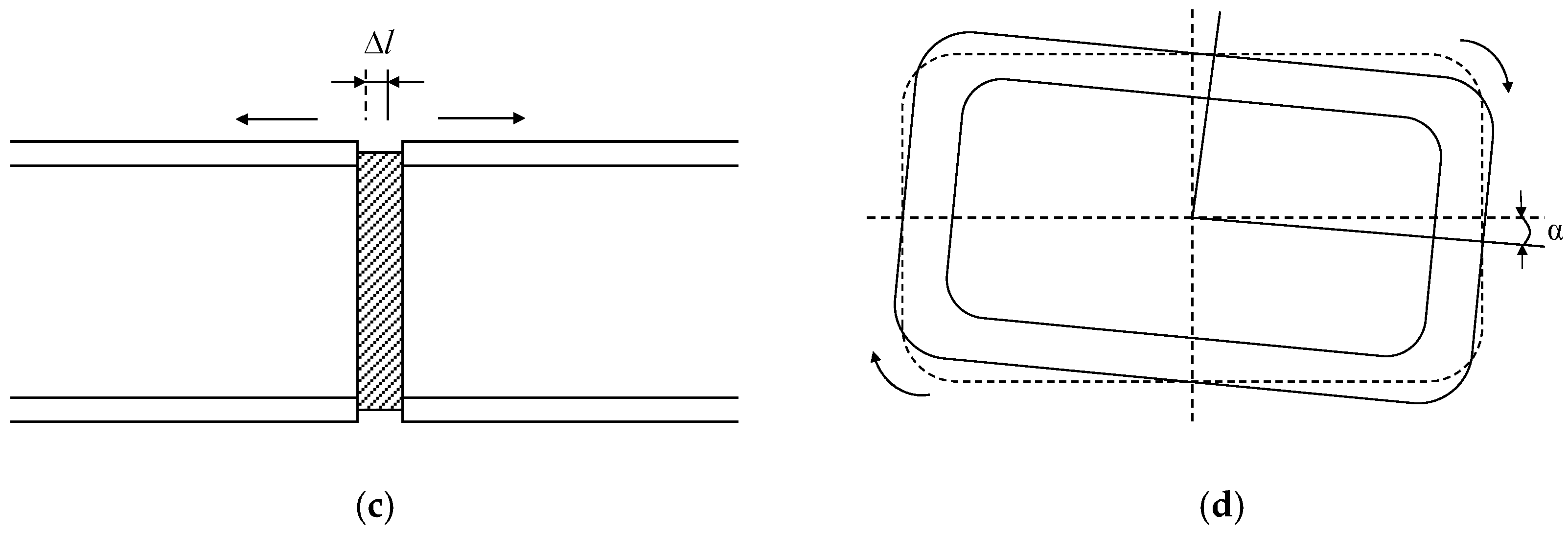
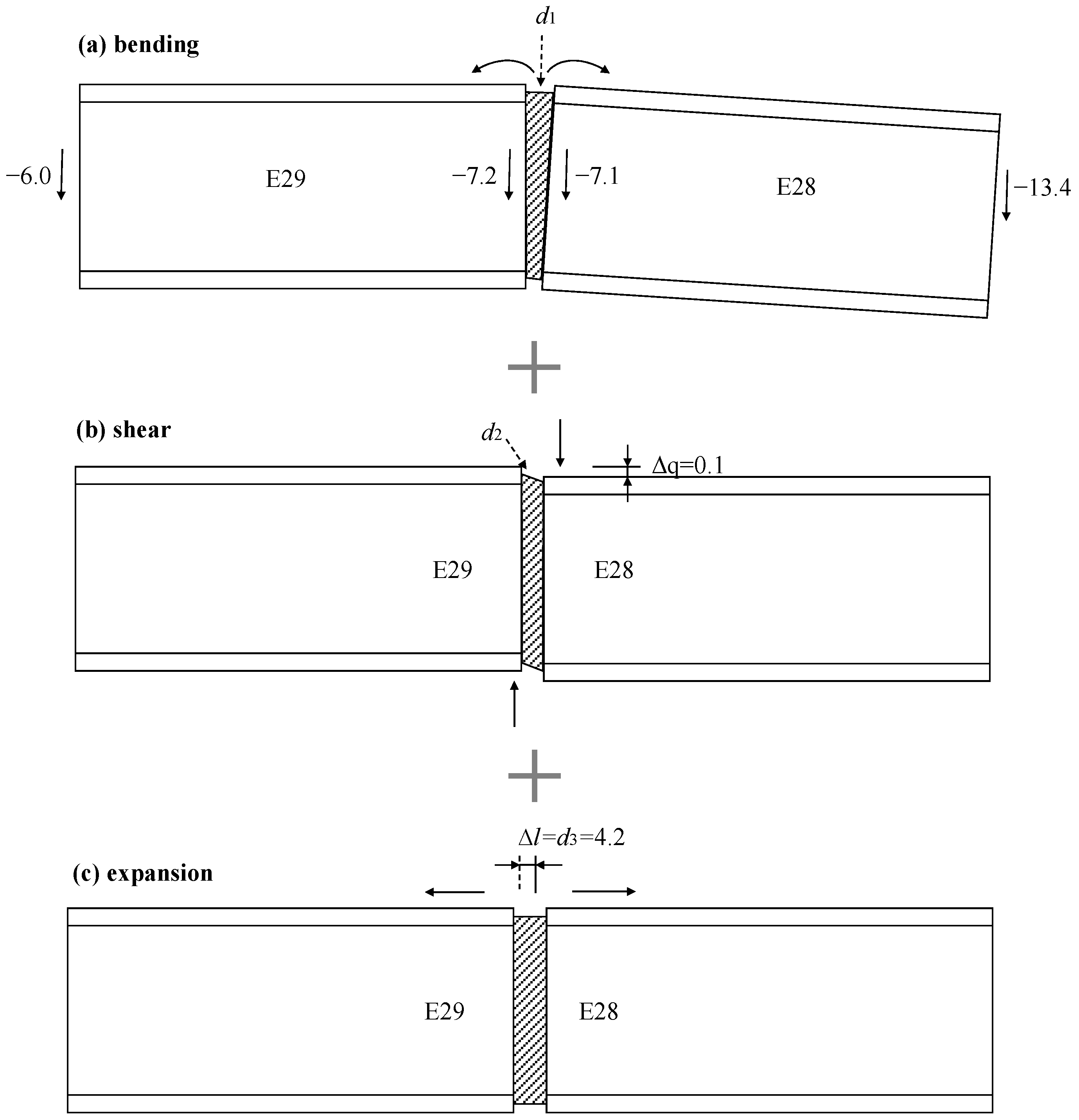
3.2.1. The Four Deformation Modes of Immersed Tunnel Joint
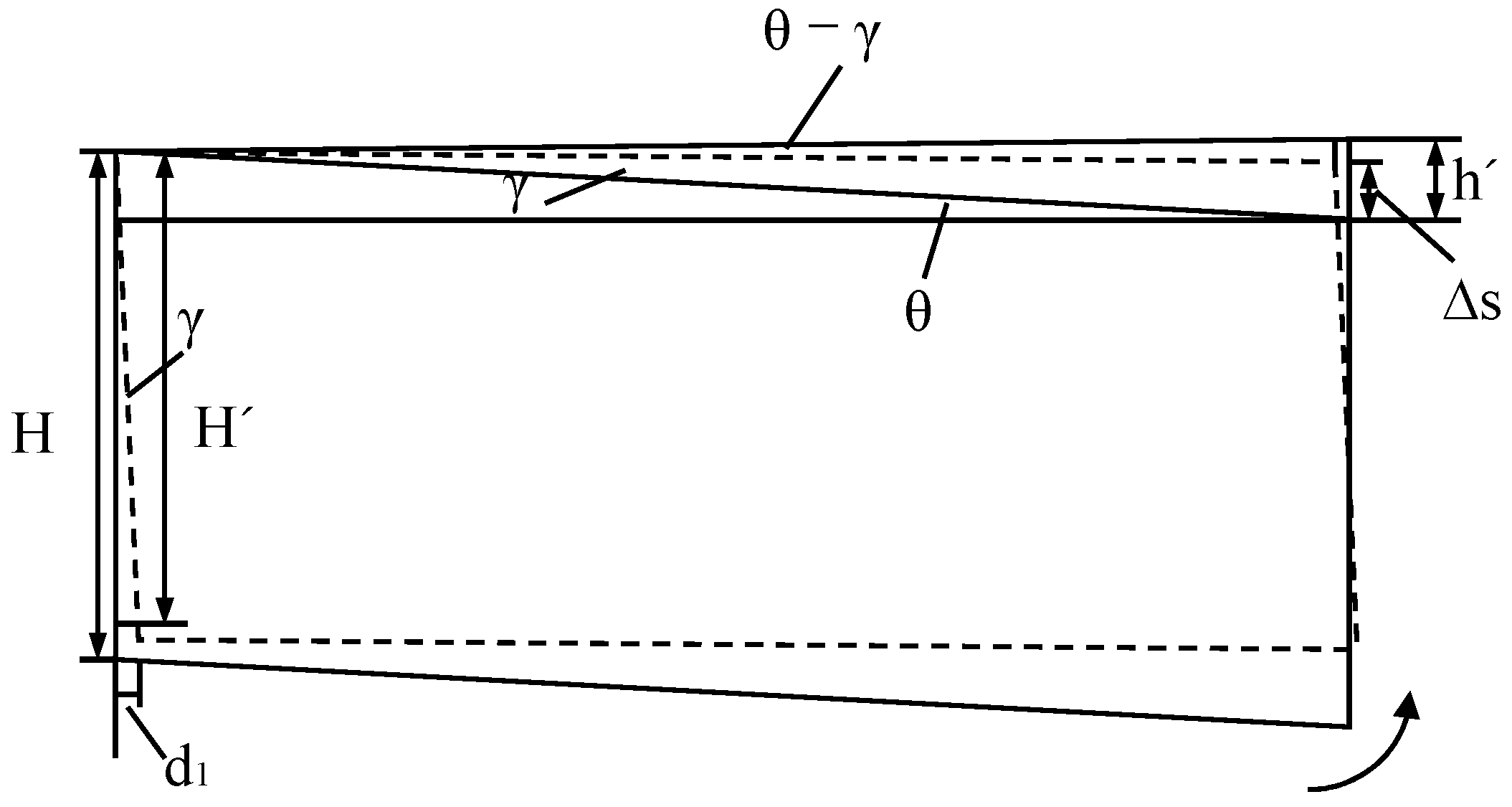
- Bending deformation
- (1)
- The element is completely rigid, the axis of the element remains straight in the rotation, the axial length is unchanged, and the deformation of the element is negligible.
- (2)
- The amount of rigid body translation displacement for each element is identical, and the element under the effect of uneven settlement only produces the corresponding rotation.
- (3)
- The tensile stiffness of the joint is less than the compressive stiffness, and the center point of rotation is located on the compressive side of the end of the element.
- (4)
- The bending deformation of the joint is small.
- 2.
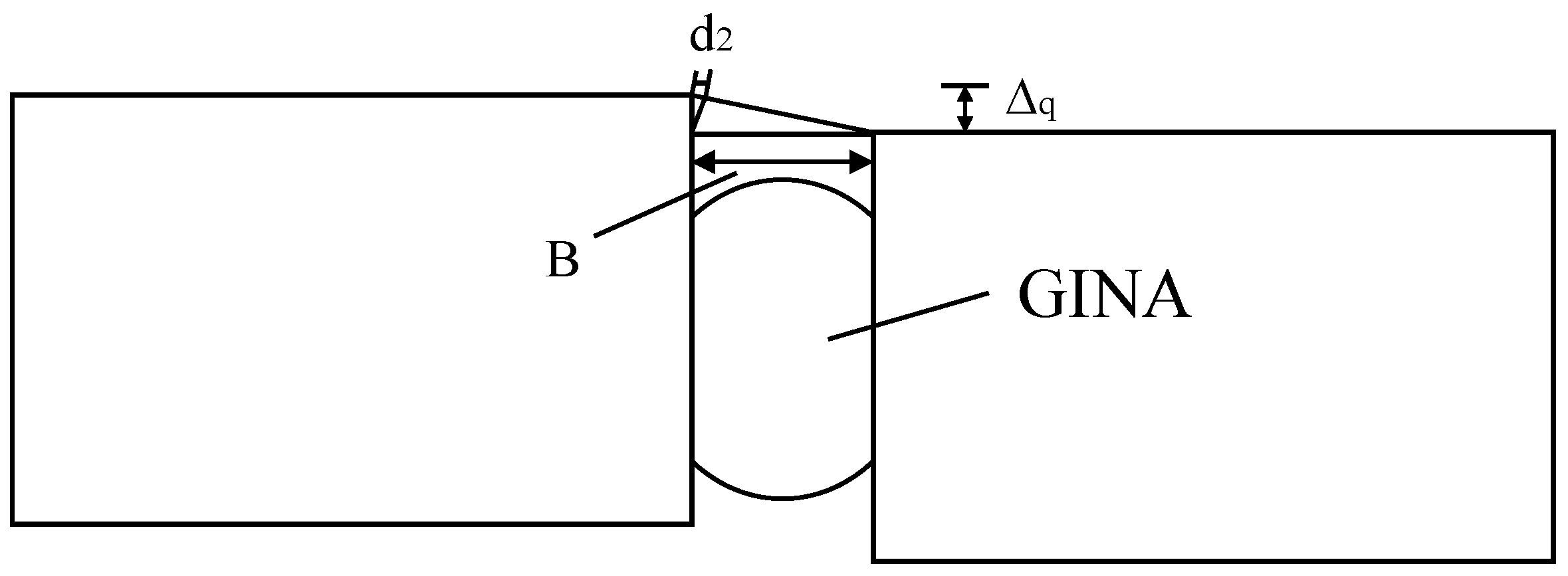
- Shear deformation
- (1)
- The element is completely rigid, and the deformation of the element is negligible.
- (2)
- The element only has rigid translation in the vertical direction, and it does not produce rotation and movement in the horizontal direction.
- (3)
- The relative settlement is small, smaller than the shear displacement limit of the joint. There is sufficient friction between the GINA gasket and the end of the steel.
- 3.
- Expansion deformation
- (1)
- The element only has rigid body translation along the axial direction, and it does not produce rotation and uneven settlement in the vertical direction;
- (2)
- The deformation along the axis of the end of steel to the end of the joint can be ignored.
- 4.
- Torsion deformation
3.2.2. Formulas of Final Change of Compression
3.3. Estimation of Relaxation Coefficient
4. Warning Method of Immersed Tunnel
4.1. Graded Warning Method
4.1.1. Graded Warning of GINA Gasket
4.1.2. The Specification of Graded Warning for GINA Gasket
4.2. Determining the Warning Thresholds of an Immersed Tunnel
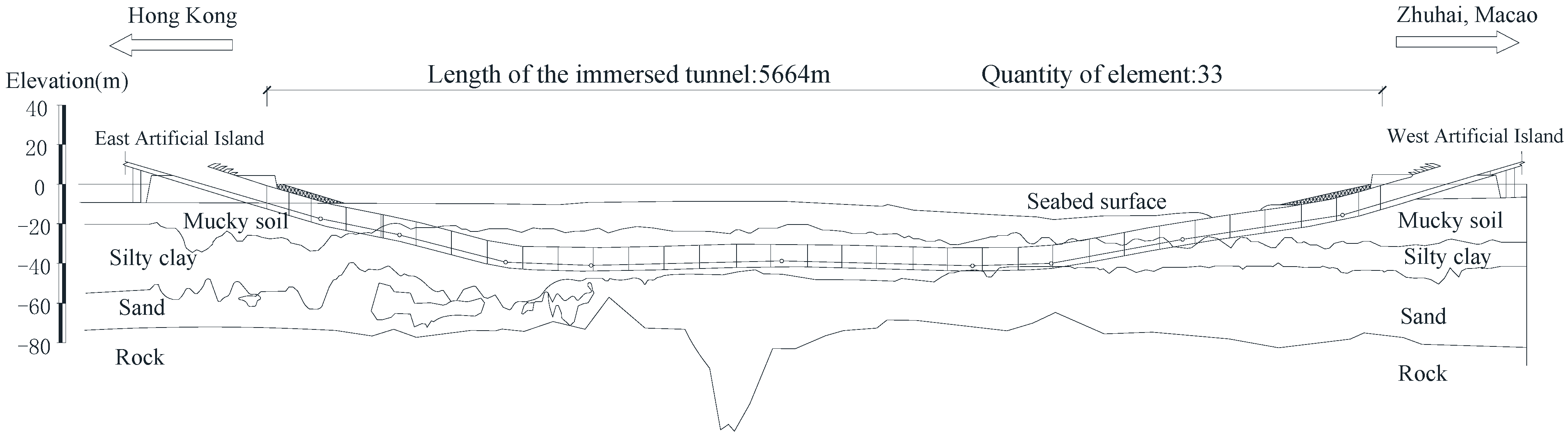
4.2.1. Outlines of the Hong Kong–Zhuhai–Macao Bridge Immersed Tunnel
4.2.2. Estimated Values of Thresholds and Safety Assessment
4.3. Illustrative Example of the Proposed Graded Warning Method
4.3.1. Results Identified by Simplified Formulations
- (1)
- The uneven settlement of the head and tail for E28 is 6.3 mm, and the uneven settlement of the head and tail for E29 is 1.2 mm. According to Equation (9), of the E28 and E29 elements can be calculated as 0.16 mm.
- (2)
- The differential post-construction settlement between the tail of E28 and the head of E29 is only 0.1 mm. According to Equation (10), of the E28 and E29 elements can be calculated as 3.6 × 10−5 mm, which can be ignored.
- (3)
- At the same time, there is also a compression change caused by expansion deformation. Based on the monitoring data, the maximum value of is recorded as 4.2 mm.
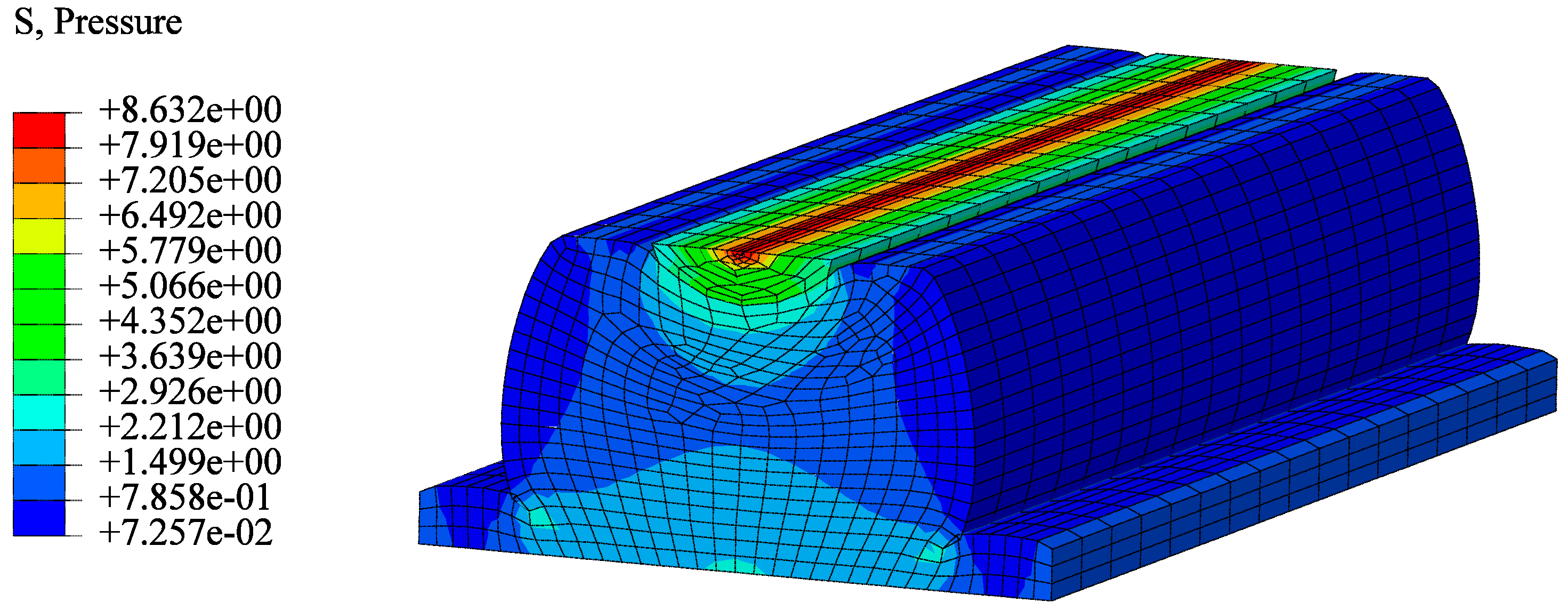
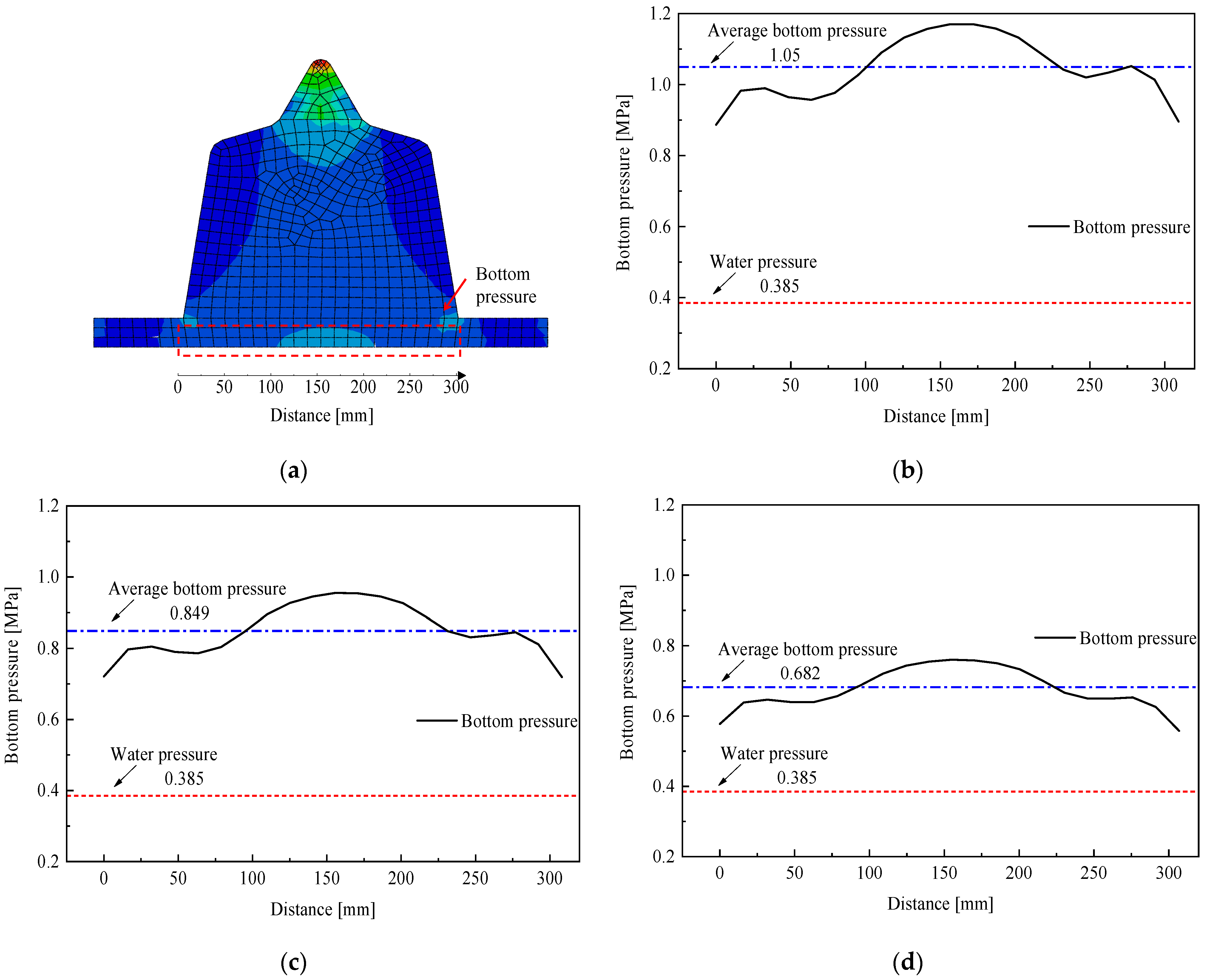
4.3.2. Results Verified by Finite Element Analysis
5. Conclusions
- (1)
- The waterproof performance of the GINA gasket is directly related to the hardness of the rubber material and the cross-sectional shape. Properly increasing the rubber hardness can significantly improve the compression stiffness of the GINA gasket. The type of main part hole can significantly reduce the stress concentration of the top rib, which is more effective for long-term waterproofing.
- (2)
- Uneven settlement is the main reason for the increase (decrease) in the compression of the GINA gasket during operation. The bending, shear, and expansion deformation will affect the compression of the GINA gasket. Therefore, to evaluate the waterproof status of the immersed tunnel during operation, monitoring the settlements of elements and the joint opening is indispensable.
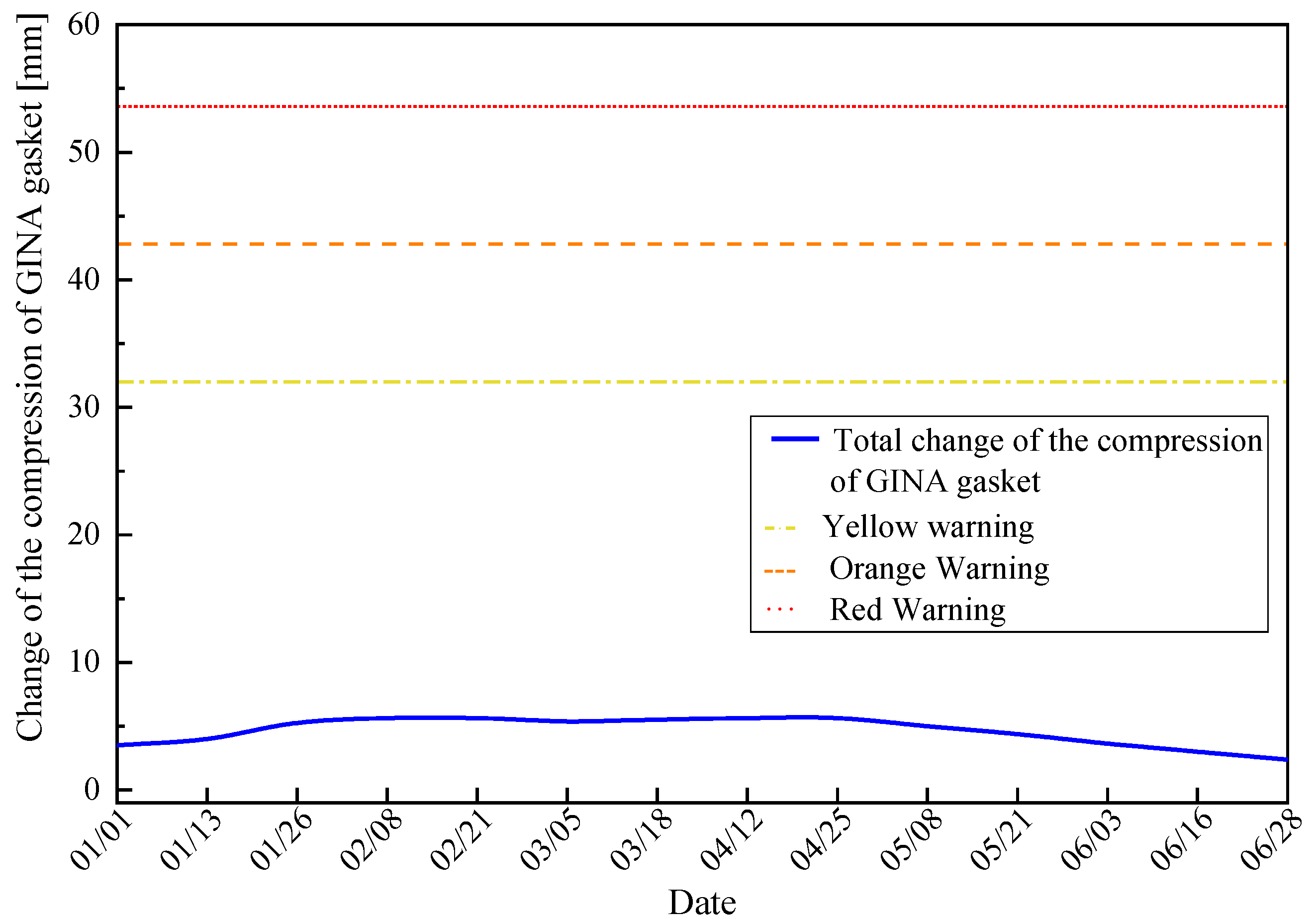
- (3)
- A material-to-mechanical analysis method is proposed to obtain the warning thresholds of the GINA gasket of immersed tunnels according to the material properties and mechanical computation model. This method is validated by the monitoring data at the joint of E28 and E29 of the HZMB Immersed Tunnel. The results show that there is no risk of leakage at this joint, which is consistent with the actual situation on site. The finite element analysis verified that the graded warning thresholds are feasible for different levels of leakage risks. Therefore, the proposed graded warning method for the GINA gasket is proven to be applicable to practical engineering.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Olsen, T.; Kasper, T.; de Wit, J. Immersed tunnels in soft soil conditions experience from the last 20 years. Tunn. Undergr. Space Technol. 2022, 121, 104315. [Google Scholar] [CrossRef]
- Niu, Y.; Xie, Y.; Zhang, H.; Yue, X.; Han, Y.; Hu, Z. Study on Deformation Characteristics of Segment Joints of the Immersed Tunnel in Hong Kong-Zhuhai-Macau Bridge. Adv. Mater. Sci. Eng. 2022, 2022, 7152132. [Google Scholar] [CrossRef]
- Wang, W.; Luo, Y.; Kong, L.; Zhang, Y.; Chen, Y. Numerical Simulation and Experimental Study on Mechanical Properties of GINA Waterstop. Mod. Tunn. Technol. 2021, 58, 237–243. (In Chinese) [Google Scholar]
- Grantz, W.C. Immersed tunnel settlements. Part 1: Nature of settlements. Tunn. Undergr. Space Technol. 2001, 16, 195–201. [Google Scholar] [CrossRef]
- Grantz, W.C. Immersed tunnel settlements: Part 2: Case histories. Tunn. Undergr. Space Technol. 2001, 16, 203–210. [Google Scholar] [CrossRef]
- Ding, W.; Liu, P. Research on the Three-Dimensional Nonlinear Stiffness Mechanical Model of Immersed Tube Tunnel Joints. In Proceedings of the 2014 Geoshanghai International Congress, Shanghai, China, 26–28 May 2014. [Google Scholar]
- Liu, P.; Chen, J.; Chen, Y.; Yang, J.; Tang, Q. Mechanical model for joints of immersed tunnel considering the influence of joint differential settlement. Int. J. Geosynth. Ground Eng. 2020, 6, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.N.; Zhou, H.Z.; Wang, L.C. Settlement mode analysis for an immersed tube tunnel considering a nonuniform foundation under tidal load. China Ocean Eng. 2022, 36, 427–438. [Google Scholar] [CrossRef]
- Xiao, W.; Yu, H.; Yuan, Y.; Taerwe, L.; Chai, R. Compression–bending behavior of a scaled immersion joint. Tunn. Undergr. Space Technol. 2015, 49, 426–437. [Google Scholar] [CrossRef]
- Xiao, W.; Yu, H.; Yuan, Y.; Taerwe, L.; Xu, G. Compression-shear behavior of a scaled immersion joint with steel shear keys. Tunn. Undergr. Space Technol. 2017, 70, 76–88. [Google Scholar] [CrossRef]
- Yu, H.; Xiao, W.; Yuan, Y.; Taerwe, L. Seismic mitigation for immersion joints: Design and validation. Tunn. Undergr. Space Technol. 2017, 67, 39–51. [Google Scholar] [CrossRef]
- Yu, H.; Yuan, Y.; Xu, G.; Su, Q.; Yan, X.; Li, C. Multi-point shaking table test for long tunnels subjected to non-uniform seismic loadings-part II: Application to the HZM immersed tunnel. Soil Dyn. Earthq. Eng. 2018, 108, 187–195. [Google Scholar] [CrossRef]
- Liu, Z.G.; Huang, H.W.; Zhang, D.M. 3D nonlinear numerical simulation on immersed tunnel joint. Undergr. Space Eng. 2011, 7, 691–694. (In Chinese) [Google Scholar]
- Huang, J.; Chen, X.K.; Li, H.; Zhang, Z.Y. Application of intelligent health monitoring system in underwater tunnel. Undergr. Space Eng. 2017, 13 (Suppl. 1), 306–313. (In Chinese) [Google Scholar]
- Song, E.; Li, P.; Lin, M.; Liu, X. The rationality of semi-rigid immersed tunnel element structure scheme and its first application in Hong Kong Zhuhai Macao bridge project. Tunn. Undergr. Space Technol. 2018, 82, 156–169. [Google Scholar] [CrossRef]
- GB/T 51318-2019; Standard for design of immersed tunnel. China Building Industry Press: Beijing, China, 2019.
- Wei, G.; Lu, S.J. Present Status and Prospects of Research on Flexible Joint Models of Immersed Tube Tunnels. Mod. Tunn. Technol. 2019, 56, 6–13. (In Chinese) [Google Scholar]
- Xue, Y. Research on the joint of tube tunnel. Spec. Struct. 2003, 20, 4–8. (In Chinese) [Google Scholar]
- Peng, L.Q.; Luo, Y.H.; Wu, X.L.; Li, B.; Lin, D.W.; Wang, J. Mechanical Property Test of Gina Seal Blet in Immersed Tunnel. Special Purpose Rubber Products 2020, 41, 56–60. (In Chinese) [Google Scholar]
- What is a Shore A Hardness and why is it important? Available online: https://www.barnwell.co.uk/shore-a-hardness/ (accessed on 6 February 2023).
- Zhang, L.; Li, Z.; Ma, X. Study on Parameter Characteristics of Rubber Mooney-rivlin model. Noise Vib. Control. 2018, 38 (Suppl. S2), 427–430. (In Chinese) [Google Scholar]
- Jiang, Z.W.; Bai, Y.; Su, Q.K. Element Joint Stiffness Properties of Large Immersed Tube Tunnels. Mod. Tunn. Technol. 2017, 54, 168–174. (In Chinese) [Google Scholar]
- Hu, Z.N.; Yang, P.; Shan, C.; Ren, Y.Z.; Dang, D. Comparative Study on Structural Types of GINA Gaskets Used in Immersed Tunnels. Tunn. Constr. 2014, 34, 937–943. (In Chinese) [Google Scholar]
- Tang, Y.; Guan, M.; Wan, X. The analysis and study of rail joints in immersed tunnel. China Railw. Sci. 2002, 23, 67–72. (In Chinese) [Google Scholar]
- Liu, Z.G.; Huang, H.W.; Zhao, Y.H.; Xie, X.Y. Immersed Tube Tunnel Real-time Health Monitoring System. Undergr. Space Eng. 2008, 4, 1110–1115. (In Chinese) [Google Scholar]
- Xie, X.Y.; Yi, C.M.; Li, W.P.; Fang, Y.G. Safety analysis of settlement monitoring data of joints of Yongjiang immersed tube tunnel during operation period. Chin. J. Geotech. Eng. 2019, 41, 2338–2344. (In Chinese) [Google Scholar]
- HPCLab. A Review Report on the Performances of Immersed Tunnel Joint; HPCLab, Tongji University: Shanghai, China, 2010. (In Chinese) [Google Scholar]
- Lu, M.; Zhu, Z.X.; Zhang, Y. Experimental study on watertightness of connections of pipe sections used in a large sunk pipe tunnel. China Build. Waterproofing 2003, 10, 9–12. (In Chinese) [Google Scholar]
- Huang, F. Numerical Simulation Analysis of GINA Rubber Water Stop. Struct. Eng. 2010, 26, 96–102. (In Chinese) [Google Scholar]
- Hu, J.Z.; Wang, Y.; Xu, G.P.; Xu, Y.; Yu, G.Z.; Gong, Y. Experimental Study and Selection Design of Domestic GINA Gasket for the Immersed Tunnel. Mod. Tunn. Technol. 2020, 57, 171–177. (In Chinese) [Google Scholar]
- Xu, X.; Tong, L.; Liu, S.; Li, H. Evaluation model for immersed tunnel health state: A case study of Honggu Tunnel, Jiangxi Province, China. Tunn. Undergr. Space Technol. 2019, 90, 239–248. [Google Scholar] [CrossRef]
- Xu, X.; Liu, S.; Tong, L. Establishment of Nanchang Honggu Tunnel health monitoring and assessment system. J. Southeast Univ. 2019, 35, 206–212. [Google Scholar]
- JTG/T 3371-01—2022; Specifications for Design of Highway Underwater Immersed Tunnel. Ministry of Transport of People’s Republic of China: Bejing, China, 2022.
- DB32/T 4243–2022; Technical Specification of Structure Health Monitoring for Underwater Tunnel. Jiangsu Provincial Administration of Market Supervision and Jiangsu Provincial Department of Housing and Urban-Rural Development: Nanjing, China, 2022.
- Hu, Z.N.; Xie, Y.L.; Wang, J. Challenges and strategies involved in designing and constructing a 6 km immersed tunnel: A case study of the Hong Kong–Zhuhai–Macao Bridge. Tunn. Undergr. Space Technol. 2015, 50, 171–177. [Google Scholar] [CrossRef]
- Hu, Z.; Xie, Y.; Xu, G.; Bin, S.; Liu, H.; Lai, J. Advantages and potential challenges of applying semi-rigid elements in an immersed tunnel: A case study of the Hong Kong-Zhuhai-Macao Bridge. Tunn. Undergr. Space Technol. 2018, 79, 143–149. [Google Scholar] [CrossRef]
- Hu, Z.N.; Xie, Y.L.; Xu, G.P.; Bin, S.L.; Zhang, H.G.; Lai, H.P.; Liu, H.Z.; Yan, C.G. Segmental joint model tests of immersed tunnel on a settlement platform: A case study of the Hongkong-Zhuhai-Macao Bridge. Tunn. Undergr. Space Technol. 2018, 78, 188–200. [Google Scholar] [CrossRef]
- Li, B.; Hou, J.; Min, K.; Zhang, J. Analyzing immediate settlement of Hong Kong-Zhuhai-Macao Bridge immersed tunnel based on monitoring data. Ships Offshore Struct. 2021, 16 (Suppl. 2), 100–109. [Google Scholar] [CrossRef]
- Jiang, X.; Lang, Q.; Jing, Q.; Wang, H.; Chen, J.; Ai, Q. An improved wavelet threshold denoising method for health monitoring data: A case study of the Hong Kong-Zhuhai-Macao Bridge immersed tunnel. Appl. Sci. 2022, 12, 6743. [Google Scholar] [CrossRef]
- Chen, J.; Jiang, X.; Yan, Y.; Lang, Q.; Wang, H.; Ai, Q. Dynamic Warning Method for Structural Health Monitoring Data Based on ARIMA: Case Study of Hong Kong–Zhuhai–Macao Bridge Immersed Tunnel. Sensors 2022, 22, 6185. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.; Lin, W.; Wang, Q.; Wang, X. The deployable element, a new closure joint construction method for immersed tunnel. Tunn. Undergr. Space Technol. 2018, 80, 290–300. [Google Scholar] [CrossRef]
- Lin, W.; Liu, X. Analysis of GINA uneven compression during hydraulic connection of immersed tunnel element at curved plane design line. China Harbour Engineering 2016, 36, 51–53, 76. (In Chinese) [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Rubber Hardness (Shore A) | Initial Compression (mm) | Accumulated Stress Relaxation (kN/m) | Estimated Stress Relaxation Rate after 100a |
|---|---|---|---|---|
| Lu et al. [28] (2003) | 65 | 80 | 89.4 | 55% |
| 100 | 184.2 | |||
| 110 | 317 | |||
| Huang [29] (2010) | / | 30 | approximately 20% of the total stress | 52.3% |
| 40 | ||||
| 50 | ||||
| Hu et al. [30] (2020) | 48 | 50 | approximately 35% of the total stress | 30.6% |
| 70 | 32% | |||
| 110 | 34.3% | |||
| 125 | 43.1% |
| Alert Level | Graded Warning | Colors |
|---|---|---|
| IV | U < 0.5U0 | Green |
| III | 0.5U0 ≤ U < 0.7U0 | Yellow |
| II | 0.7U0 ≤ U < 0.9U0 | Orange |
| I | U ≥ 0.9U0 | Red |
| Index | A | B | C | D |
|---|---|---|---|---|
| Joint opening (mm) | ≤21.6 | 21.6–25 | 25–28.3 | ≥28.3 |
| Joint compression (mm) | ≤20.5 | 20.5–23.3 | 23.3–33.3 | ≥33.3 |
| Joint horizontal displacement (mm) | ≤25 | 25–30 | 30–35.3 | ≥35.3 |
| Uneven settlement (mm) | ≤30 | 30–40 | 40–50 | ≥50 |
| Alert Level | Description | Alert Status | Warning Thresholds |
|---|---|---|---|
| I | Particularly serious | Red warning | ≥U0 |
| II | Serious | Orange warning | [0.75–1) U0 |
| III | Relatively serious | Yellow warning | [0.5–0.75) U0 |
| IV | General | Blue warning | [0.25–0.5) U0 |
| V | Normal | / | <0.25 U0 |
| Soil Layer | Unit Weight (kN/m3) | Direct Shear Test | |||
|---|---|---|---|---|---|
| Quick Shear | Consolidated Quick Shear | ||||
| (kPa) | (°) | (kPa) | (°) | ||
| Mucky soil | 17.6 | 8.0 | 7.0 | 10.0 | 16.0 |
| Silt clay | 19.3 | 20.0 | 20.0 | 25.0 | 25.0 |
| Sand | 21.4 | / | / | / | / |
| Alert Level | Description | Alert Status | Remaining Compression (mm) | Change of Compression (mm) |
|---|---|---|---|---|
| I | Particularly serious | Red warning | <86.4 | >53.6 |
| II | Serious | Orange warning | [86.4–97.2) | (42.8–53.6] |
| III | Relatively serious | Yellow warning | [97.2–108) | (32–42.8] |
| IV | General | Blue warning | ≥108 | ≤32 |
| Part | Hardness (Shore A) | C10 (MPa) | C01 (MPa) |
|---|---|---|---|
| Nose | 50 | 0.012 | 0.309 |
| Main body | 65 | 0.7405 | 0.1851 |
| Remaining Compression (mm) | Average Bottom Pressure/Water Pressure | Maximum Bottom Pressure/Water Pressure | Minimum Bottom Pressure/Water Pressure |
|---|---|---|---|
| 108 | 2.73 | 3.04 | 2.30 |
| 97.2 | 2.20 | 2.48 | 1.87 |
| 86.4 | 1.77 | 1.97 | 1.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Huang, J.; Jiang, X.; Yan, Y.; Du, S.; Chen, J.; Ai, Q. Investigation of Warning Thresholds for the Deformation of GINA Gasket of Immersed Tunnel Based on a Material-to-Mechanical Analysis. Mathematics 2023, 11, 1010. https://doi.org/10.3390/math11041010
Ding H, Huang J, Jiang X, Yan Y, Du S, Chen J, Ai Q. Investigation of Warning Thresholds for the Deformation of GINA Gasket of Immersed Tunnel Based on a Material-to-Mechanical Analysis. Mathematics. 2023; 11(4):1010. https://doi.org/10.3390/math11041010
Chicago/Turabian StyleDing, Hao, Jingsong Huang, Xinghong Jiang, Yu Yan, Shouji Du, Juntao Chen, and Qing Ai. 2023. "Investigation of Warning Thresholds for the Deformation of GINA Gasket of Immersed Tunnel Based on a Material-to-Mechanical Analysis" Mathematics 11, no. 4: 1010. https://doi.org/10.3390/math11041010