
Regional Consensus Control for Multi-Agent Systems with Actuator Saturation

1
School of Mechanical and Electrical Engineering, Soochow University, Suzhou 215131, China
2
Zhejiang Key Laboratory of Robotics and Intelligent Manufacturing Equipment Technology, Ningbo Institute of Materials Technology & Engineering, Chinese Academy of Sciences, Ningbo 315201, China
3
School of Artificial Intelligence and Smart Manufacturing, Hechi University, Hechi 546300, China
*
Authors to whom correspondence should be addressed.
Mathematics 2023, 11(4), 1038; https://doi.org/10.3390/math11041038
Submission received: 27 December 2022
/
Revised: 1 February 2023
/
Accepted: 10 February 2023
/
Published: 18 February 2023
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper considers the regional consensus problem for multi-agent systems with actuator saturation. By utilizing the theory of convex set, a novel multiple nonlinear feedback control protocol is presented, which can effectively reduce the conservatism in dealing with saturated nonlinear input. In order to obtain a larger estimate on the domain of consensus, the composite Laplacian quadratics function is constructed to derive sufficient conditions for the consensus of multi-agent systems. In addition, an alternative convex hull representation is employed to further enlarge the above-mentioned domain of consensus. Finally, a numerical simulation case study illustrates the validity as well as the superiority of the proposed approaches.
1. Introduction
Multi-agent systems (MASs) research started at the outset of the 21st century. The concept of multi-agent systems was discovered from the group behavior of animals in nature. Through the interaction between individuals, these groups eventually emerge with a formal and orderly group behavior. Since some states of MASs need to be agreed in many applications, consensus of MASs is often considered one of the most important issues in multi-agent cooperative control. Multi-agent cooperative control aims to design a distributed control protocol to make all agents achieve a predefined specified target, and initially Yamaguchi et al. in [1] implemented robot formations through a control protocol for MASs. The investigation of consensus control of MASs has been widely considered by the research community in recent years. The work in [2] gave the theoretical framework of the typical consensus model as well as the concept of control protocol for MASs. The research conducted in [3] proposed a consensus control protocol based on coupling weights of adjacent agents, and the consensus problem was transformed into the stability analysis of a group of low-dimensional matrices. Based on Riccati inequality and algebraic graph theory, it was reported in [4] that the consensus of MASs can be achieved in fixed and switching topologies. Moreover, similar research has been carried out as follows: the consensus of time-delay MASs [5,6], the consensus of MASs with switching topologies [7,8], and the consensus control protocol for heterogeneous MASs [9,10].
Actuator saturation is an ubiquitous phenomenon existing in engineering applications and it has typical characteristics of nonlinearity [11,12], so the treatment of saturation nonlinearity becomes an popular but difficult subject. In [13], the saturation term was converted into a locally sector-bounded function for the first time, and sector-bounded constraints were then applied to derive sufficient conditions of stability based on linear matrix inequalities. The subsequent work in [14] presented an adaptive event-triggered consensus protocol for MASs with actuator saturation. Meanwhile, the work in [15] embedded the network-based consensus of MASs with bounded inputs into its control design. However, it is relatively conservative to deal with saturation nonlinearity by using sector-bounded constraints. Thus, the study carried out in [16] proposed the convex combination technique to handle the saturation phenomenon. Using the convex combination technique, the consensus of saturated MASs with disturbances was achieved in [17]. Meanwhile, the exponential consensus control protocol was designed in [18] for Markov jump MASs with input saturation, and the regional consensus of differential inclusions MASs was studied in [19].
It is introduced in [20] that the global stabilization is impossible for an exponentially unstable system with bounded input. As a result, the unstable MASs involving saturated actuators can only achieve regional consensus; in other words, the consensus can be reached if and only if the initial state of every agent is in the domain of consensus (DC). In practical engineering, a larger DC can provide greater freedom for the initial state of systems. Therefore, how to determine a larger DC is one of the critical problems in the research of regional consensus. In the aforementioned works [17,18,19], the DC was estimated by the level set of Laplacian quadratics function (LQF), but this method was also somehow conservative in the sense of the estimate of DC. Thus, as an extension of composite Lyapunov function in [21], the composite Laplacian quadratics function (CLQF) was proposed in [22]. The advantage of CLQF mainly lies in that its level set is the convex hull of several ellipsoids, which would be useful to indicate what practical engineering applications the solution proposed in the article will be used for. To the author’s knowledge, most results on the consensus for saturated MASs were achieved by linear feedback control protocol and the DC was estimated by an LQF approach. However, the traditional linear feedback control method is still conservative in dealing with saturated nonlinearity, and the level set of LQF also has some limitation in estimating the DC.
Based on the above discussions, this paper achieves the regional consensus of saturated MASs by a novel nonlinear feedback approach, and the estimate of DC is enlarged by constructing non-LQF. The contributions are mainly listed in the following three points:
- The level set included in CLQF is established to estimate DC for saturated MASs, which larger than estimated by the LQF approach.
- An improvement of the consensus control and the estimation of DC is achieved by utilizing an alternative convex hull representation—enlarged.
The remaining sections of this paper are as follows. Section 2 provides the system description and preliminaries. In Section 3, three different solutions are presented for the consensus problem of saturated MASs, and the corresponding optimization problems of maximizing the DC estimate are also derived. In Section 4, a numerical simulation case is given to demonstrate the obtained results. Section 5 is about the conclusion of this paper.
Notations. indicates the integer set and stands for the symbol function. ⊗ means the Kronecker product symbol. Let be the Lyapunov function. is the 1-level set of and is an ellipsoid. For a square matrix A, , is the abbreviation of subject to, and denotes the supremum of the optimization under the constraint .
2. System Description and Preparations
The typical multi-agent model consisting of N identical agents with actuator saturation is as follows:
where is the state and is the input for . and are given matrices. The standard saturation function is defined by , where .
In MASs, the communication topology of the agent network is essential to their cooperation and it can be represented by the graph , where is the set of nodes and represents the set of edges. The specific reference can be shown in Figure 1. Denote as the adjacency matrix of , where if and if . The Laplacian matrix of is defined by , where and . In this paper, we consider the MAS whose graph is undirected, that is, is equivalent to for all . In addition, the graph is assumed to be connected, in other words, there exists a path from any node to any other node in this graph.
Let and , system (1) can be transformed into the following congregated form:
where is an identity matrix.
Definition 1.
Definition 2.
Meanwhile, the optimal is determined by
Remark 1.
Here, we recall some properties of CLQF in [22]. The CLQF is an extension of the composite Lyapunov function in [21] and it has similar properties as the composite Lyapunov function. Denote as the 1-level set of . It is obvious that reduces to an LQF when . The advantage of CLQF is that its level sets are the convex hull of the level sets of LQF , i.e.,
For the Laplacian matrix of graph , denote its ith eigenvalue as for . Since is connected, 0 is an eigenvalue with the corresponding eigenvector and other eigenvalues are all positive. Thus, without loss of generality, it is further assumed that . Since the graph is undirected, the Laplacian matrix is symmetric, i.e., , which can be diagonalized with where is a unitary matrix satisfying and . By removing the first row of U and , denote the resulting matrices as and . It follows from that . Let for , then is defined by . Thus, the following holds
Lemma 1.
Lemma 2.
([21]). It is assumed that for and for . Let and for , then we have and for , , where stands for the gradient of at x. Furthermore, .
Denote a group of matrices by with for , where is a diagonal matrix whose diagonal elements are either 0 or 1. Thus, the following lemma is given:
Lemma 3.
3. The Design of Consensus Protocol
In this section, the improved consensus control protocol is designed for MASs subject to actuator saturation, and the CLQF is constructed to derive sufficient conditions for the consensus of MASs. Furthermore, the maximal estimate of DC is determined by solving an optimization problem. In order to compare with the traditional linear feedback method in [17,18,19], Theorem 2 is given. In addition, by employing an alternative convex hull representation, Theorem 3 provides less conservative results.
3.1. Multiple Nonlinear Feedback for Regional Consensus
In order to achieve the consensus of MAS (2), a novel nonlinear consensus control protocol is presented as
In view of Lemma 3, it follows from (4) that the saturated consensus control protocol is as follows:
where
Remark 2.
The protocol (5) is an extension of saturated linear consensus control protocol in [17,18,19]. By constructing the nonlinear consensus control protocol (5) combining an optimal function , the group of possible combinations of feedback gain matrices F and H are generalized to possible combinations of and . Meanwhile, sufficient conditions of the consensus are also relaxed.
Theorem 1.
Let for . If there exist , for , , such that
Proof.
According to the structure of CLQF , its derivative can be calculated by where . Based on (9), is a multi-valued mapping function, that is, may be a set for each . Let be an element in for , and it is defined by
Multiplying (7) from both sides by , one can get
The consensus of system (9) is analyzed in two cases. Firstly, let us consider for . Then and is a vector whose jth element is 1 and the rest are zeros. Then, we have , and . The following equality holds for any :
According to Lemma 1, , it can be obtained that . Since , it means that .
In the following part, the case where will be considered. is defined as the optimal parameters of and . Based on Lemma 2, for and for , we have , , and for . The operator is computed by
In the sequel, we will determine the maximal from all the ellipsoids satisfying the condition of set invariance, and take the maximal as the estimate of DC. According to the definition of , the range of invariant set is related to with . Thus,
In what follows, we take the size of into consideration. In order to maximize the ellipsoid , a reference set with , is given. Let contain with the largest possible, the maximal estimate of DC can be obtained. Thus, the optimal problem is formulated as follows:
Using the result in [19], the condition (b) can be transformed into
3.2. Linear Feedback for Regional Consensus
If the consensus control protocol is in the form of linear feedback in [17,18,19], i.e.,
the following theorem is given. In view of Lemma 3, the saturated control protocol is designed by
Theorem 2.
Let for . If there exist , for , , such that
Proof.
Theorem 2 is a special case of Theorem 1, and its proof is omitted here. □
Next, similar to the technique in Section 3.1, the optimization problem for maximizing the estimate of DC can be formulated as follows:
3.3. The Improved Results
In this subsection, an alternative convex hull representation is used to obtain less conservative estimate of DC than that resulting from Theorem 1.
Lemma 4.
In view of Lemma 4, it follows from the control protocol (4) that
Remark 3.
Protocol (27) is a more general form of protocol (5). By applying the alternative convex hull representation, each vertex of the convex hull in protocol (27) is configured with an independent auxiliary matrix, . Therefore, each subfunction of CLQF contains different auxiliary matrices, and a set of less conservative consensus conditions can be obtained.
Theorem 3.
Let for . If there exist , for , , such that
Proof.
Theorem 3 is a general case of Theorem 1, and its proof is omitted here. □
Similarly, the optimization problem for maximizing the estimate of DC is formulated as follows:
4. Case Simulation
Consider the mechanical model of MAS (1) proposed in [19,25], and the system matrices are given as follows:
The communication topology graph of MAS is shown in Figure 1, and the corresponding adjacency matrix and Laplacian matrix are computed as
The reference set is selected as . The optimization problem (20) is not a convex optimization problem. It is difficult to obtain the global optimal solution of the BMI optimization problem. A second way is to solve the BMI through an iterative LMI. Here, we will use the path-following method in [26] to solve the problem. The core idea of the path-following method is as follows: given the known well-dimensioned matrices A and B, if the matrix norm of the unknown well-dimensioned matrices and is far less than the corresponding matrix norm of A and B, then . The left side of the approximately equal sign can be seen as the product of two unknown matrices, and the right side is the sum of several matrix products containing at least one unknown matrix, thus solving the problem of the product of two unknown matrices. The original BMI optimization problem can be reduced to the LMI problem by using the approximate form on the right. Then, we can obtain a level set with and
In order to compare with the linear feedback method of Theorem 3.2, we solve the optimal problem (26) and obtain that and
As a further improvement of Theorem , Theorem gives a level set with and
To compare these results, the level set of agent 1 is simulated and the rest of agents are similar to agent 1. Figure 2 shows four level sets obtained by different approaches. The result obtained by CLQF (Theorem 2) has a larger DC estimate than the results in [19,25]. Moreover, the nonlinear control protocol presented in this paper (Theorem 1) provides a larger ellipsoidal estimate. As a result of improvement, the estimate of DC obtained by the alternative convex hull representation (Theorem 3) is the largest. In order to verify the designed control protocol, the initial state is taken into account. Solving the optimal problem (20), the control gain matrices and auxiliary gain matrices are obtained as follows:
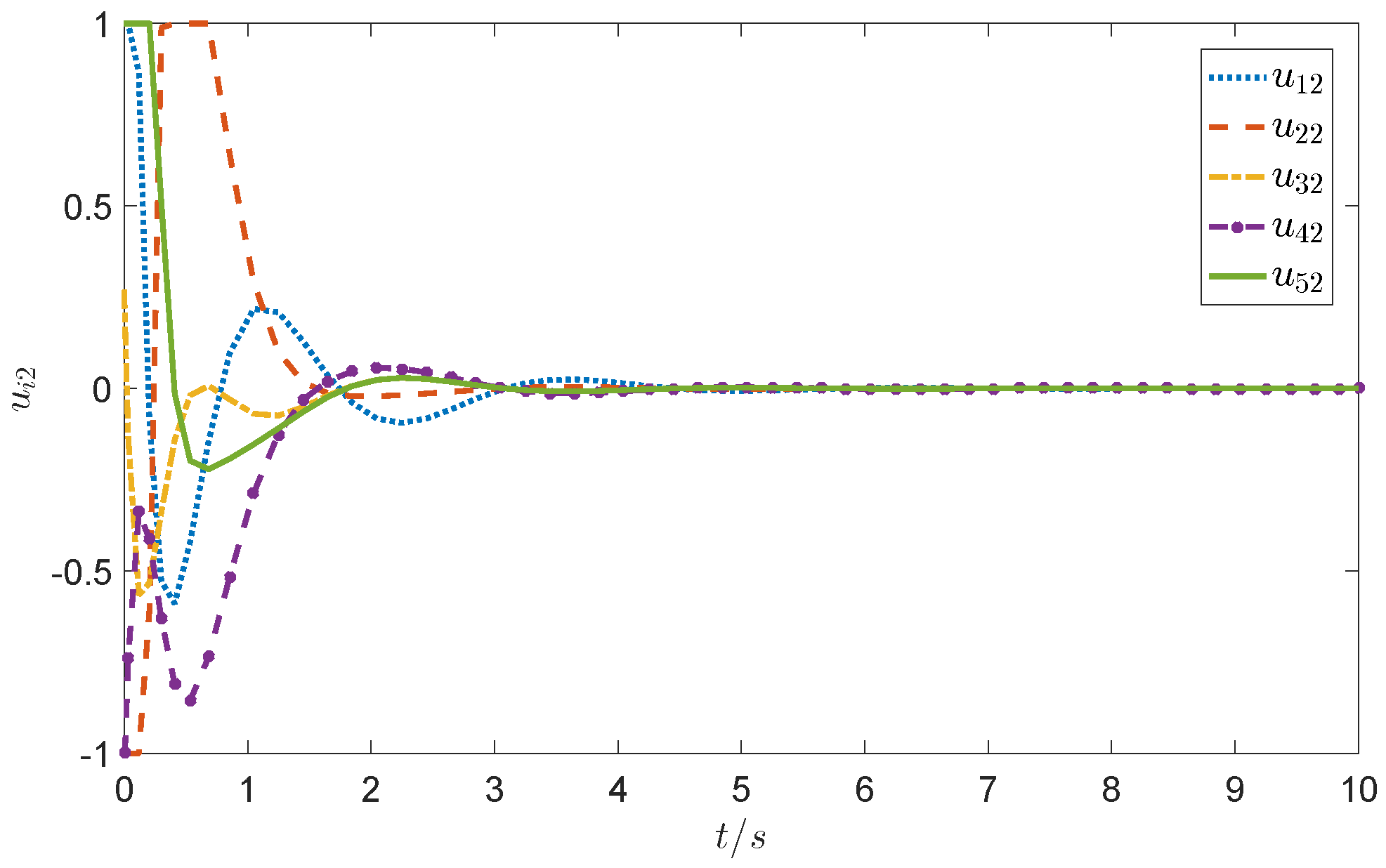
The state response errors between agent 1 and agent i are defined by , and these simulation results are presented in Figure 3 and Figure 4. Meanwhile, the responses of saturated input and are depicted in Figure 5 and Figure 6. It is obvious that the state errors of agents and the saturated inputs gradually converge to zero.
5. Conclusions
In this paper, the authors address the consensus problem of MASs with actuator saturation. Firstly, a novel multiple nonlinear control protocol is designed, and the CLQF is constructed to guarantee the consensus of MASs. Then, the maximal DC estimate is derived by an optimization problem in terms of bilinear matrix inequalities. To compare with the traditional consensus control protocol in [19,25], Theorem 2 is presented. Moreover, an alternative convex hull representation is applied to further improve the designed consensus control protocol. Finally, the simulation results reveal that the proposed control protocol makes all agents achieve consensus and provides a larger estimate of DC than the approaches in [19,25].
Author Contributions
Conceptualization, Y.Z. and Y.Q.; methodology, J.H. and Y.Z.; software, L.Y.; validation, L.Y., T.Z. and Q.L.; formal analysis, T.Z.; investigation, Y.Z.; resources, Y.Z.; data curation, J.H.; writing—original draft preparation, Y.Q. and L.Y.; writing—review and editing, Q.L.; visualization, T.Z.; supervision, Y.Z.; project administration, Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by National Science Foundation of China grant #62103295, Natural Science Research Project of Jiangsu Colleges and Universities #21KJB510045, National Natural Science Foundation of Jiangsu Province of China (BK2021—1309), Open Fund Project of Ningbo Institute of Materials Technology and Engineering, Chinese Academy of Sciences #RIE2020OSF05, and the Project of the Key Laboratory of AI and Information Processing (Hechi University), Education Department of Guangxi Zhuang Autonomous Region (2022GXZDSY015).
Data Availability Statement
Data in this paper is not available due to privacy restrictions.
Conflicts of Interest
The authors declare no conflict of interest, and the funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Yamaguchi, H.; Arai, T.; Beni, G. A distributed control scheme for multiple robotic vehicles to make group formations. Robot. Auton. Syst. 2001, 36, 125–147. [Google Scholar] [CrossRef]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 57, 213–224. [Google Scholar]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Xiao, W.; Cao, L.; Li, H.; Lu, R. Observer-based adaptive consensus control for nonlinear multi-agent systems with time-delay. Sci. China Inf. Sci. 2020, 63, 132202. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Li, H.; Ding, X.; Zhao, G. Leader–follower consensus of multiagent systems with time delays over finite fields. IEEE Trans. Cybern. 2018, 49, 3203–3208. [Google Scholar] [CrossRef]
- Yu, J.; Wang, L. Group consensus in multi-agent systems with switching topologies and communication delays. Syst. Control Lett. 2010, 59, 340–348. [Google Scholar] [CrossRef]
- Zou, W.; Shi, P.; Shi, P.; Shi, Y. Finite-time consensus of second-order switched nonlinear multi-agent systems. IEEE Trans. Neural Networks Learn. Syst. 2019, 31, 1757–1762. [Google Scholar] [CrossRef]
- Qian, Y.Y.; Liu, L.; Feng, G. Output consensus of heterogeneous linear multi-agent systems with adaptive event-triggered control. IEEE Trans. Autom. Control 2018, 64, 2606–2613. [Google Scholar] [CrossRef]
- Du, H.; Wen, G.; Wu, D.; Cheng, Y.; Lü, J. Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica 2020, 113, 108797. [Google Scholar] [CrossRef]
- Sun, W.; Gao, H.; Kaynak, O. Vibration isolation for active suspensions with performance constraints and actuator saturation. IEEE/ASME Trans. Mechatronics 2015, 20, 675–683. [Google Scholar] [CrossRef]
- Huang, J.; Yang, L.; Trinh, H. Robust control for incremental quadratic constrained nonlinear time-delay systems subject to actuator saturation. Appl. Math. Comput. 2021, 405, 126271. [Google Scholar] [CrossRef]
- Da Silva, J.M.G.; Tarbouriech, S. Antiwindup design with guaranteed regions of stability: An LMI-based approach. IEEE Trans. Autom. Control 2005, 50, 106–111. [Google Scholar] [CrossRef]
- Yin, X.; Yue, D.; Hu, S. Adaptive periodic event-triggered consensus for multi-agent systems subject to input saturation. Int. J. Control 2016, 89, 653–667. [Google Scholar] [CrossRef]
- Ding, L.; Zheng, W.X.; Guo, G. Network-based practical set consensus of multi-agent systems subject to input saturation. Automatica 2018, 89, 316–324. [Google Scholar] [CrossRef]
- Hu, T.; Lin, Z.; Chen, B.M. Analysis and design for discrete-time linear systems subject to actuator saturation. Syst. Control. Lett. 2002, 45, 97–112. [Google Scholar] [CrossRef]
- Deng, C.; Yang, G.H. Consensus of linear multiagent systems with actuator saturation and external disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 284–288. [Google Scholar] [CrossRef]
- Sakthivel, R.; Sakthivel, R.; Kaviarasan, B.; Alzahrani, F. Leader-following exponential consensus of input saturated stochastic multi-agent systems with Markov jump parameters. Neurocomputing 2018, 287, 84–92. [Google Scholar] [CrossRef]
- Song, Q.; Song, Q.; Lin, Z. Regional consensus of linear differential inclusions subject to input saturation. Int. J. Robust Nonlinear Control 2020, 30, 2461–2474. [Google Scholar] [CrossRef]
- Lin, Z. Control design in the presence of actuator saturation: From individual systems to multi-agent systems. Sci. China Inf. Sci. 2020, 62, 1–3. [Google Scholar] [CrossRef] [Green Version]
- Hu, T.; Lin, Z. Properties of the composite quadratic Lyapunov functions. IEEE Trans. Autom. Control 2004, 49, 1162–1167. [Google Scholar] [CrossRef]
- Chen, F.; Xiang, L.; Ren, W. Properties of composite Laplacian quadratics and their applications in consensus of linear differential inclusions. IEEE Trans. Autom. Control 2016, 61, 2269–2275. [Google Scholar] [CrossRef]
- Hu, T.; Teel, A.R.; Zaccarian, L. Stability and performance for saturated systems via quadratic and nonquadratic Lyapunov functions. IEEE Trans. Autom. Control 2006, 51, 1770–1786. [Google Scholar] [CrossRef]
- Li, Y.; Lin, Z. Improvements to the linear differential inclusion approach to stability analysis of linear systems with saturated linear feedback. Automatica 2013, 49, 821–828. [Google Scholar] [CrossRef]
- Yu, Z.; Chen, F.; Lan, W. Regional consensus for non-ANCBC systems with input saturation. In Proceedings of the IEEE Conference on Control Technology and Applications, Hong Kong, China, 19–21 August 2019. [Google Scholar]
- Hassibi, A.; How, J.; Boyd, S. A path-following method for solving BMI problems in control. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999. [Google Scholar]
Figure 1.
The communication topology graph of five agents.
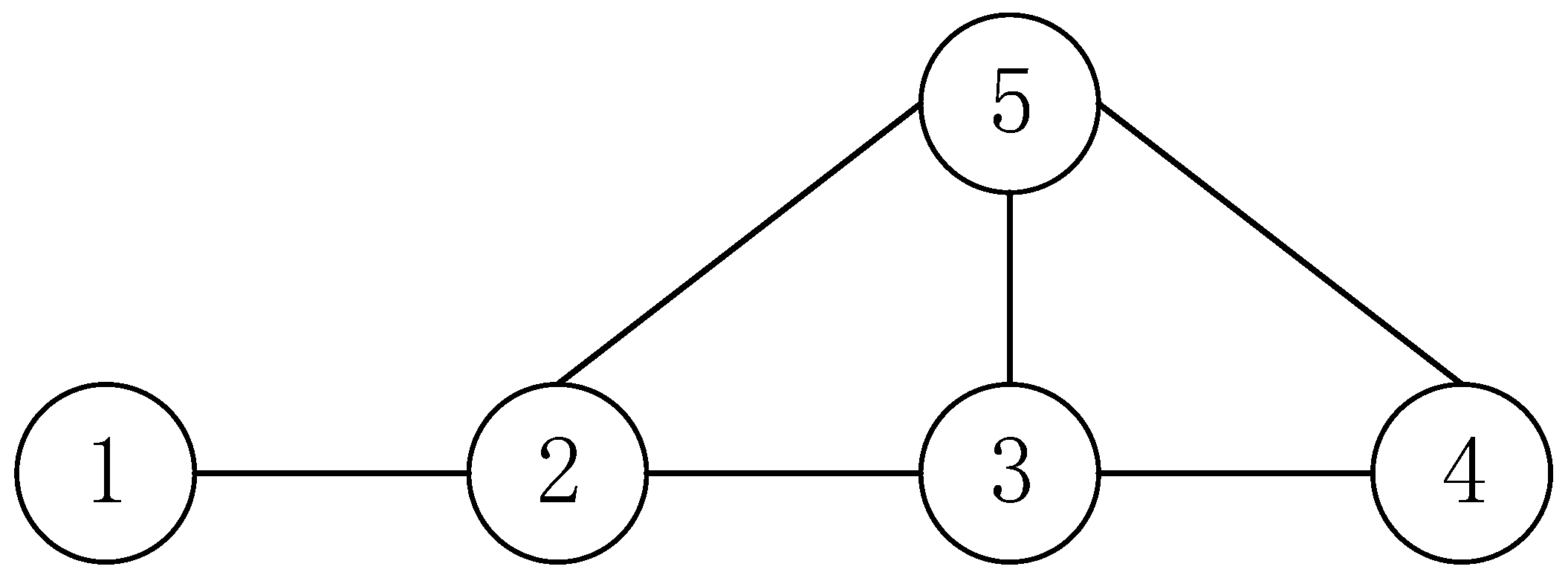
Figure 2.
The invariant sets of the CLQF (derived by Theorems 1–3) and the LQF (derived by the method in [25,26]).
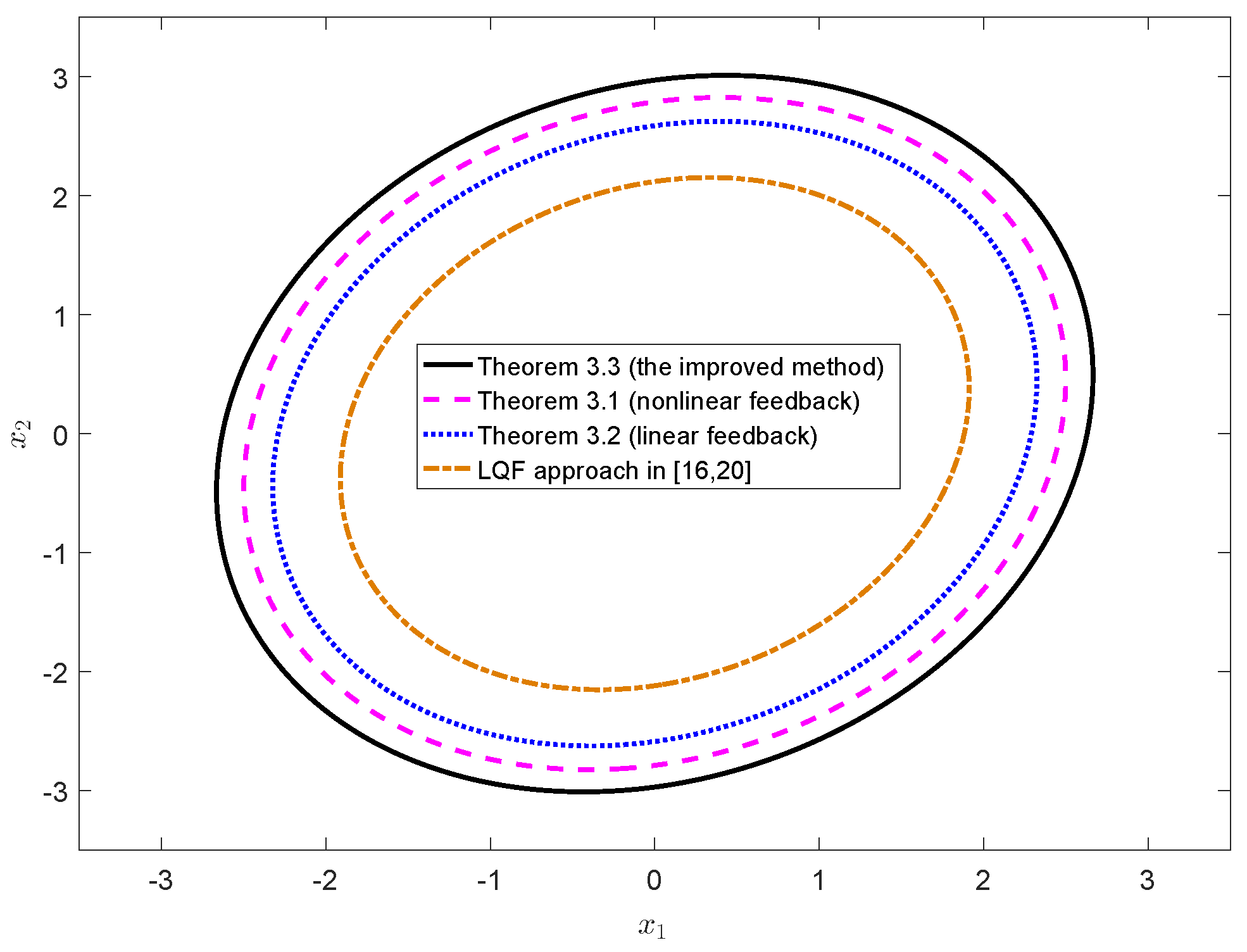
Figure 3.
The state response errors under the initial state and the control input .

Figure 4.
The state response errors under the initial state and the control input .
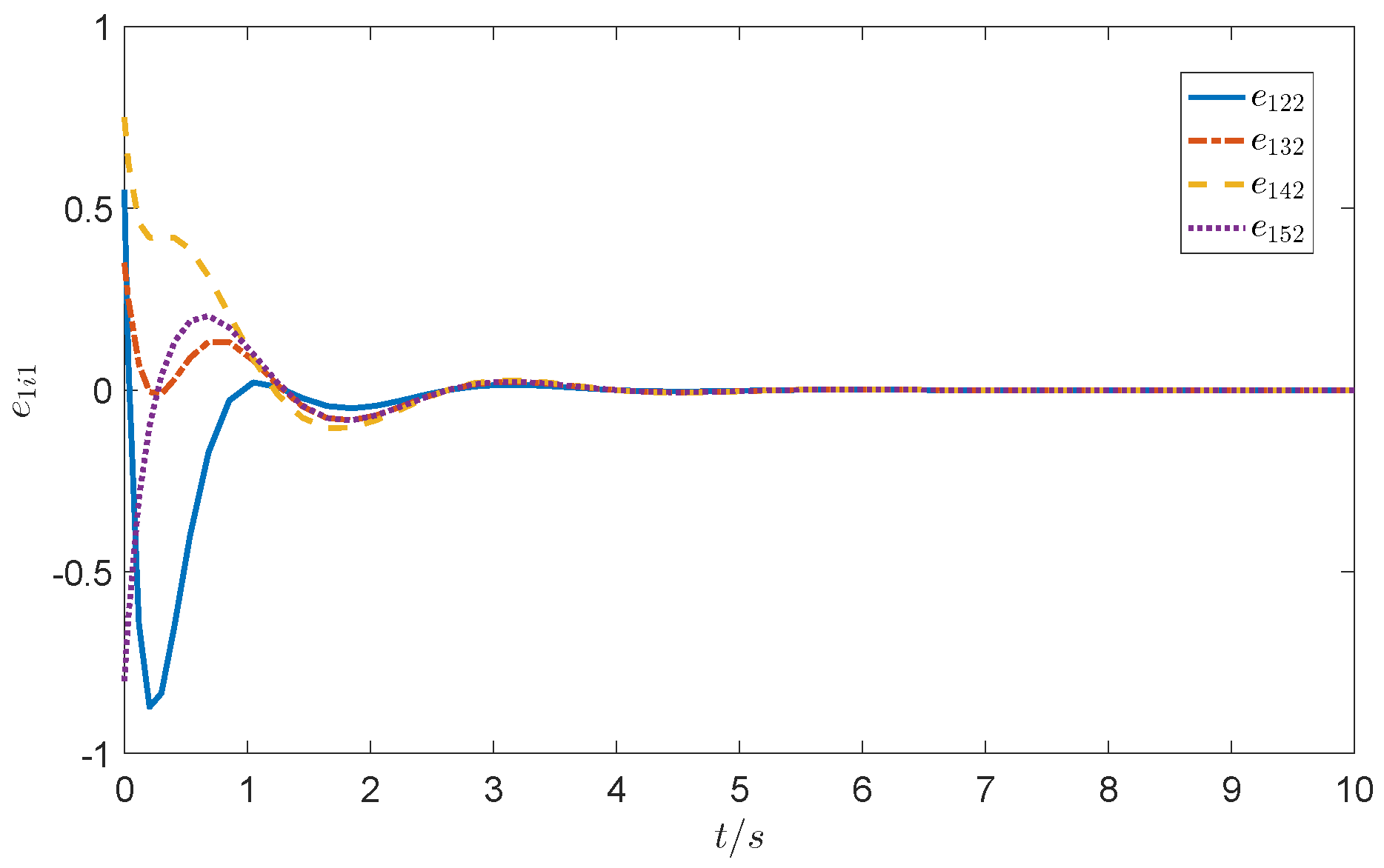
Figure 5.
The responses of saturated input on the boundary of .
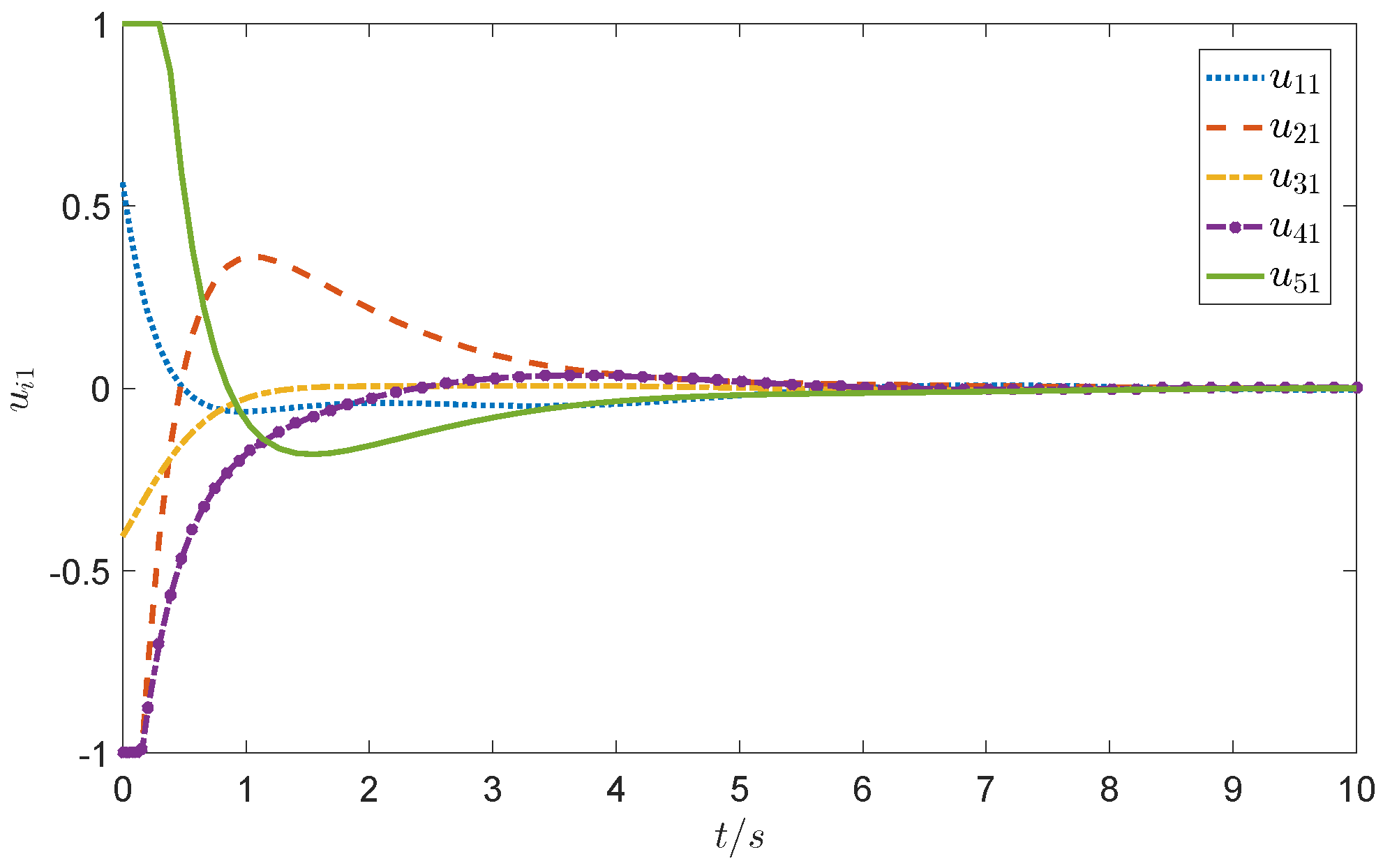
Figure 6.
The responses of saturated input on the boundary of .
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, Y.; Qin, Y.; Huang, J.; Yang, L.; Zheng, T.; Li, Q. Regional Consensus Control for Multi-Agent Systems with Actuator Saturation. Mathematics 2023, 11, 1038. https://doi.org/10.3390/math11041038
AMA Style
Zhang Y, Qin Y, Huang J, Yang L, Zheng T, Li Q. Regional Consensus Control for Multi-Agent Systems with Actuator Saturation. Mathematics. 2023; 11(4):1038. https://doi.org/10.3390/math11041038
Chicago/Turabian StyleZhang, Yueyuan, Yong Qin, Jun Huang, Lin Yang, Tianjiang Zheng, and Qingyuan Li. 2023. "Regional Consensus Control for Multi-Agent Systems with Actuator Saturation" Mathematics 11, no. 4: 1038. https://doi.org/10.3390/math11041038
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.