Urban-Tissue Optimization through Evolutionary Computation


Abstract
:1. Introduction
1.1. Relevance of the Interdisciplinary Experiment
1.2. Significance of Variation
1.3. Challenge and Hypothesis
1.4. Barcelona’s Urban Model
1.4.1. Urban Growth
1.4.2. Existing Urban Setting
2. Materials and Methods
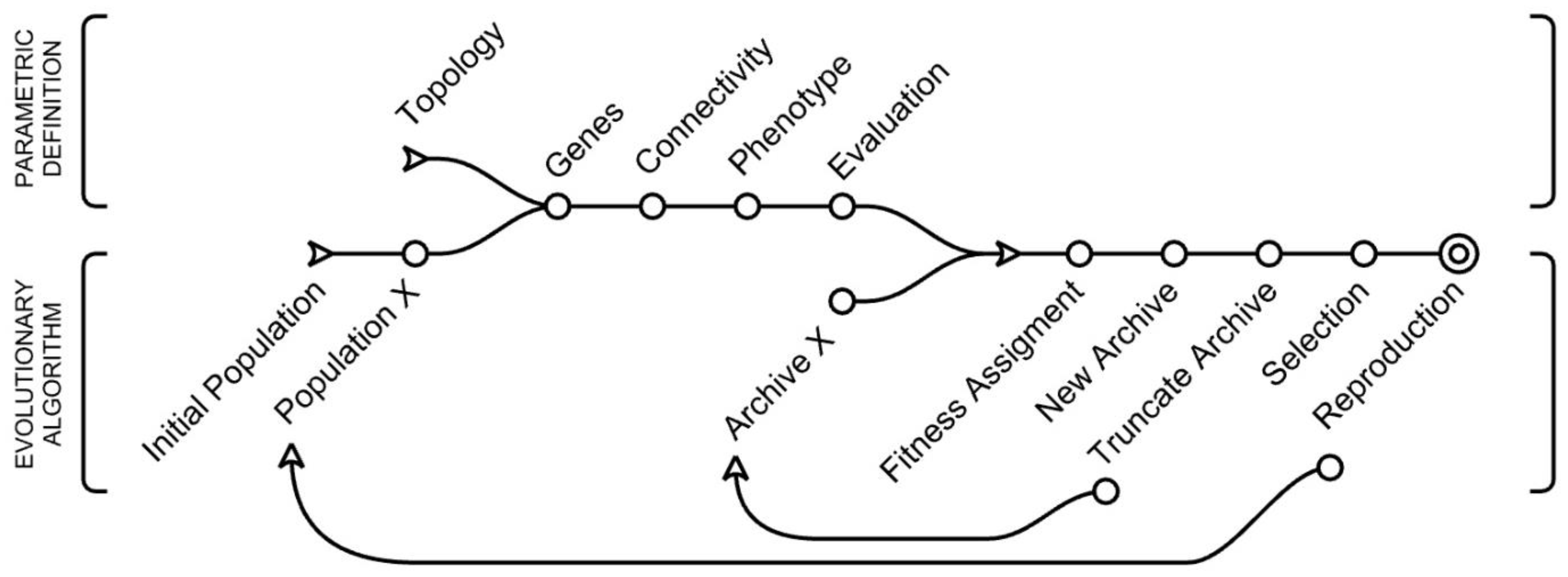
2.1. Evolutionary Strategy
- EAs can be much slower (but they are any-time algorithms).
- EAs are less dependent on initial conditions (still need several runs).
- EAs can use alternative error functions: not continuous or differentiable, including structural terms.
- EAs are not easily stuck in local optima.
- EAs are better “scouters” (global searchers).
2.2. Experimental Setup
- CY—Larger courtyards for open public spaces (number of mesh faces exposed).
- B—High solar exposure on the building façades (number of mesh faces exposed).
- C—Greater block connectivity (numerical value based on Figure 5).
- DE—High population density (one that is close to the current state) (hab/km2).
- D—Block Depth (0.3%–0.7%) of the block side.
- Sd—Subdivisions (2–6 parts/side).
- O—Two-sided block’s organization (parallel vs. corner).
- A—Block orientation (0°, 90°, 180°, 270°).
- Fa—Deletion (amount of blocks’ façades deleted: 0, 1, 2, 3, 4).
- Fn—Minimum and maximum floors (2–6).
- Fex—Minimum and maximum extra floors (2–6).
- Generation size: 100.
- Generation count: 100 (2 + 98).
- Selection method: Elitism 50% (method fixed by the plugin, percentage set by the researcher).
- Mutation Probability: 33% (initial value 10%).
- Mutation Rate: 66% (initial value 50%).
- Crossover Rate: 80% (default 1-point crossover).
- CY—Larger courtyards: courtyard is converted into a mesh with 4425 faces. Each mesh has a vector attached related to a virtual sun that will validate intersecting operations with the block itself.
- B—High solar exposure: calculated with vectors in a subdivided mesh to check self-shadowing or shadows from neighbor buildings. Number of faces in mesh depends on the phenotype.
- C—Greater block connectivity: A network of lines is drawn through proximity operations. The definition checks intersections with this network to establish its relationship with neighboring buildings.
- DE—Density objective: based on density in Barcelona’s current Eixample, considering number of floors and total area built by the phenotype.
- Because of the low generation size (100 individuals), the probability and strength of mutations have been increased to 0.33 and 0.66, respectively. Although slower in the process, mutations should compensate for a low initial population, producing results outside of the original genes.
- With the same purpose, the amount of genes has been reduced, deleting those that had little or no effect on the overall shape of the block. The simplification of the phenotype helps to lighten the computational load and reduces the amount of permutations.
3. Experiment Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Jacobs, J. The Death and Life of Great American Cities; Random House: New York, NY, USA, 1961; ISBN 067974195X. [Google Scholar]
- Simon, H.A. The Sciences of the Artificial, 3rd ed.; MIT Press: Cambridge, MA, USA, 1997; ISBN 9780262691918. [Google Scholar]
- Soddu, C. Recognizability of the Idea: The Evolutionary Process of Argenia. In Creative Evolutionary Systems; Corne, D.W., Bentley, P.J., Eds.; Morgan Kaufmann: San Diego, CA, USA, 2002; pp. 109–127. ISBN 978-1-55860-673-9. [Google Scholar]
- Koolhaas, R. Whatever Happened to Urbanism? Des. Q. 1995, 164, 28–31. [Google Scholar]
- Mayr, E. Typological Versus Population Thinking. In Evolution and the Diversity of Life: Selected Essays; Harvard University Press: Cambridge, MA, USA, 1997; pp. 26–29. ISBN 978-0-674-27105-0. [Google Scholar]
- Ajuntament de Barcelona Població per Districtes. 2015–2016. Available online: http://www.bcn.cat/estadistica/catala/dades/anuari/cap02/C020102.htm (accessed on 1 August 2018).
- Talk Architecture the 3 Drawings of Cerda. Available online: https://talkarchitecture.wordpress.com/2011/02/06/the-3-drawings-of-cerda/ (accessed on 1 August 2018).
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Busquets, J. Barcelona: La Construccion Urbanistica de Una Ciudad Compacta; Ediciones del Serbal: Barcelona, Spain, 2004. [Google Scholar]
- Arroyo, F. Barcelona Suspende en Zona Verde|Edición Impresa|EL PAÍS. Available online: https://elpais.com/diario/2009/10/24/catalunya/1256346439_850215.html (accessed on 1 August 2018).
- Ajuntament de Barcelona la Superilla Pilot de la Maternitat i Sant Ramon Estarà en Marxa al Mes D’abril|Superilles. Available online: http://ajuntament.barcelona.cat/superilles/ca/noticia/la-superilla-pilot-de-la-maternitat-i-sant-ramon-estarza-en-marxa-al-mes-dabril (accessed on 1 August 2018).
- Luke, S. Essentials of Metaheuristics; Lulu Press, Inc.: Morrisville, NC, USA, 2013; ISBN 9781300549628. [Google Scholar]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the Strength Pareto Evolutionary Algorithm. Evol. Methods Des. Optim. Control Appl. Ind. Probl. 2001. [Google Scholar]
- Makki, M.; Farzaneh, A.; Navarro, D. The Evolutionary Adaptation of Urban Tissues through Computational Analysis. In Proceedings of the 33rd eCAADe Conference, Vienna University of Technology, Vienna, Austria, 16–18 September 2015; Martens, B., Wurzer, G., Grasl, T., Lorenz, W.E., Schaffranek, R., Eds.; Volume 2, pp. 563–571. [Google Scholar]
- Back, T.; Hammel, U.; Schwefel, H.P. Evolutionary computation: Comments on the history and current state. IEEE Trans. Evol. Comput. 1997, 1, 3–17. [Google Scholar] [CrossRef]
- Zitzler, E. Evolutionary Algorithms for Multiobjective Optimization: Methods and Applications. TIK-Schriftenreihe 1999. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phenotype | Genome |
|---|---|
| 26 | [‘MainCourtyard’, ‘0.6’, ‘0.7’, ‘0.4’, ‘0.3’, ‘0.7’, ‘0.6’, ‘0.6’, ‘0.6’, ‘0.4’, ‘0.4’, ‘0.7’, ‘0.6’, ‘0.6’, ‘0.5’, ‘0.5’, ‘0.6’, ‘SubDivisions’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘Organization’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘Angle’, ‘2.0’, ‘3.0’, ‘2.0’, ‘2.0’, ‘2.0’, ‘1.0’, ‘0.0’, ‘3.0’, ‘0.0’, ‘0.0’, ‘3.0’, ‘3.0’, ‘3.0’, ‘2.0’, ‘3.0’, ‘2.0’, ‘Connectivity’, ‘1.0’, ‘2.0’, ‘0.0’, ‘3.0’, ‘3.0’, ‘2.0’, ‘1.0’, ‘2.0’, ‘3.0’, ‘3.0’, ‘0.0’, ‘2.0’, ‘1.0’, ‘1.0’, ‘0.0’, ‘3.0’, ‘min_floors’, ‘3.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘5.0’, ‘5.0’, ‘3.0’, ‘4.0’, ‘5.0’, ‘max_floors’, ‘2.0’, ‘2.0’, ‘6.0’, ‘3.0’, ‘2.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘2.0’, ‘6.0’, ‘6.0’, ‘4.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘4.0’, ‘min_extra_floors’, ‘4.0’, ‘4.0’, ‘4.0’, ‘5.0’, ‘3.0’, ‘1.0’, ‘2.0’, ‘1.0’, ‘3.0’, ‘1.0’, ‘2.0’, ‘5.0’, ‘2.0’, ‘4.0’, ‘5.0’, ‘3.0’, ‘max_extra_floors’, ‘3.0’, ‘2.0’, ‘4.0’, ‘5.0’, ‘0.0’, ‘1.0’, ‘1.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘1.0’, ‘4.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘0.0’] |
| 57 | [‘MainCourtyard’, ‘0.5’, ‘0.4’, ‘0.6’, ‘0.3’, ‘0.3’, ‘0.5’, ‘0.4’, ‘0.3’, ‘0.5’, ‘0.5’, ‘0.6’, ‘0.6’, ‘0.3’, ‘0.3’, ‘0.4’, ‘0.5’, ‘SubDivisions’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘Organization’, ‘6.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘Angle’, ‘2.0’, ‘2.0’, ‘2.0’, ‘0.0’, ‘1.0’, ‘1.0’, ‘3.0’, ‘2.0’, ‘2.0’, ‘0.0’, ‘1.0’, ‘0.0’, ‘1.0’, ‘1.0’, ‘3.0’, ‘0.0’, ‘Connectivity’, ‘3.0’, ‘3.0’, ‘4.0’, ‘0.0’, ‘4.0’, ‘3.0’, ‘2.0’, ‘1.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘min_floors’, ‘4.0’, ‘6.0’, ‘2.0’, ‘5.0’, ‘2.0’, ‘4.0’, ‘3.0’, ‘5.0’, ‘3.0’, ‘6.0’, ‘3.0’, ‘3.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘max_floors’, ‘3.0’, ‘4.0’, ‘6.0’, ‘5.0’, ‘3.0’, ‘3.0’, ‘4.0’, ‘5.0’, ‘2.0’, ‘4.0’, ‘3.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘4.0’, ‘3.0’, ‘min_extra_floors’, ‘2.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘1.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘2.0’, ‘5.0’, ‘3.0’, ‘0.0’, ‘3.0’, ‘4.0’, ‘3.0’, ‘1.0’, ‘max_extra_floors’, ‘4.0’, ‘2.0’, ‘5.0’, ‘4.0’, ‘0.0’, ‘2.0’, ‘3.0’, ‘2.0’, ‘5.0’, ‘3.0’, ‘2.0’, ‘4.0’, ‘5.0’, ‘4.0’, ‘3.0’, ‘4.0’] |
| 81 | [‘MainCourtyard’, ‘0.6’, ‘0.7’, ‘0.7’, ‘0.5’, ‘0.7’, ‘0.7’, ‘0.7’, ‘0.3’, ‘0.7’, ‘0.6’, ‘0.4’, ‘0.3’, ‘0.7’, ‘0.6’, ‘0.6’, ‘0.6’, ‘SubDivisions’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘Organization’, ‘5.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘Angle’, ‘1.0’, ‘1.0’, ‘2.0’, ‘2.0’, ‘1.0’, ‘3.0’, ‘3.0’, ‘0.0’, ‘0.0’, ‘0.0’, ‘2.0’, ‘3.0’, ‘0.0’, ‘0.0’, ‘2.0’, ‘3.0’, ‘Connectivity’, ‘1.0’, ‘0.0’, ‘0.0’, ‘0.0’, ‘1.0’, ‘0.0’, ‘0.0’, ‘1.0’, ‘1.0’, ‘0.0’, ‘0.0’, ‘0.0’, ‘1.0’, ‘2.0’, ‘0.0’, ‘1.0’, ‘min_floors’, ‘5.0’, ‘5.0’, ‘4.0’, ‘6.0’, ‘6.0’, ‘4.0’, ‘5.0’, ‘5.0’, ‘3.0’, ‘4.0’, ‘5.0’, ‘4.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘3.0’, ‘max_floors’, ‘4.0’, ‘3.0’, ‘3.0’, ‘4.0’, ‘3.0’, ‘5.0’, ‘3.0’, ‘6.0’, ‘3.0’, ‘3.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘3.0’, ‘3.0’, ‘min_extra_floors’, ‘1.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘2.0’, ‘5.0’, ‘2.0’, ‘1.0’, ‘2.0’, ‘1.0’, ‘4.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘3.0’, ‘1.0’, ‘max_extra_floors’, ‘3.0’, ‘3.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘3.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘1.0’, ‘5.0’, ‘5.0’, ‘3.0’, ‘5.0’, ‘1.0’] |
| Phenotype | Genome |
|---|---|
| 2 | [‘MainCourtyard’, ‘0.5’, ‘0.3’, ‘0.6’, ‘0.7’, ‘0.7’, ‘0.3’, ‘0.5’, ‘0.3’, ‘0.7’, ‘0.3’, ‘0.3’, ‘0.4’, ‘0.3’, ‘0.5’, ‘0.4’, ‘0.6’, ‘SubDivisions’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘Organization’, ‘5.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘Angle’, ‘2.0’, ‘2.0’, ‘2.0’, ‘3.0’, ‘1.0’, ‘0.0’, ‘3.0’, ‘2.0’, ‘0.0’, ‘0.0’, ‘1.0’, ‘0.0’, ‘1.0’, ‘0.0’, ‘3.0’, ‘1.0’, ‘Connectivity’, ‘0.0’, ‘3.0’, ‘1.0’, ‘0.0’, ‘4.0’, ‘3.0’, ‘1.0’, ‘1.0’, ‘2.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘0.0’, ‘1.0’, ‘2.0’, ‘4.0’, ‘min_floors’, ‘5.0’, ‘5.0’, ‘3.0’, ‘4.0’, ‘6.0’, ‘4.0’, ‘3.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘6.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘max_floors’, ‘6.0’, ‘5.0’, ‘2.0’, ‘3.0’, ‘2.0’, ‘4.0’, ‘4.0’, ‘5.0’, ‘3.0’, ‘4.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘3.0’, ‘min_extra_floors’, ‘2.0’, ‘2.0’, ‘5.0’, ‘4.0’, ‘1.0’, ‘3.0’, ‘1.0’, ‘1.0’, ‘1.0’, ‘2.0’, ‘1.0’, ‘0.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘1.0’, ‘max_extra_floors’, ‘3.0’, ‘2.0’, ‘5.0’, ‘0.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘0.0’, ‘4.0’, ‘1.0’, ‘5.0’, ‘1.0’, ‘3.0’, ‘5.0’, ‘4.0’, ‘2.0’] |
| 54 | [‘MainCourtyard’, ‘0.5’, ‘0.4’, ‘0.6’, ‘0.3’, ‘0.7’, ‘0.5’, ‘0.3’, ‘0.3’, ‘0.4’, ‘0.4’, ‘0.6’, ‘0.6’, ‘0.3’, ‘0.5’, ‘0.5’, ‘0.7’, ‘SubDivisions’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘Organization’, ‘6.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘5.0’, ‘Angle’, ‘2.0’, ‘3.0’, ‘2.0’, ‘0.0’, ‘2.0’, ‘1.0’, ‘3.0’, ‘2.0’, ‘2.0’, ‘1.0’, ‘1.0’, ‘0.0’, ‘3.0’, ‘0.0’, ‘3.0’, ‘0.0’, ‘Connectivity’, ‘3.0’, ‘0.0’, ‘1.0’, ‘0.0’, ‘4.0’, ‘3.0’, ‘2.0’, ‘1.0’, ‘2.0’, ‘4.0’, ‘3.0’, ‘0.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘min_floors’, ‘5.0’, ‘6.0’, ‘2.0’, ‘5.0’, ‘2.0’, ‘4.0’, ‘5.0’, ‘5.0’, ‘2.0’, ‘6.0’, ‘3.0’, ‘3.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘max_floors’, ‘3.0’, ‘4.0’, ‘5.0’, ‘5.0’, ‘3.0’, ‘4.0’, ‘4.0’, ‘5.0’, ‘2.0’, ‘3.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘4.0’, ‘4.0’, ‘min_extra_floors’, ‘5.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘1.0’, ‘4.0’, ‘3.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘3.0’, ‘5.0’, ‘3.0’, ‘5.0’, ‘3.0’, ‘1.0’, ‘max_extra_floors’, ‘4.0’, ‘4.0’, ‘5.0’, ‘4.0’, ‘0.0’, ‘3.0’, ‘2.0’, ‘3.0’, ‘5.0’, ‘1.0’, ‘2.0’, ‘4.0’, ‘5.0’, ‘4.0’, ‘3.0’, ‘0.0’] |
| 52 | [‘MainCourtyard’, ‘0.5’, ‘0.4’, ‘0.3’, ‘0.3’, ‘0.3’, ‘0.7’, ‘0.6’, ‘0.3’, ‘0.4’, ‘0.5’, ‘0.6’, ‘0.4’, ‘0.7’, ‘0.5’, ‘0.4’, ‘0.6’, ‘SubDivisions’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘4.0’, ‘Organization’, ‘5.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘5.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘6.0’, ‘Angle’, ‘1.0’, ‘2.0’, ‘0.0’, ‘1.0’, ‘1.0’, ‘3.0’, ‘3.0’, ‘1.0’, ‘3.0’, ‘0.0’, ‘2.0’, ‘0.0’, ‘1.0’, ‘1.0’, ‘3.0’, ‘3.0’, ‘Connectivity’, ‘3.0’, ‘2.0’, ‘2.0’, ‘4.0’, ‘4.0’, ‘3.0’, ‘1.0’, ‘2.0’, ‘4.0’, ‘4.0’, ‘1.0’, ‘0.0’, ‘4.0’, ‘1.0’, ‘0.0’, ‘1.0’, ‘min_floors’, ‘4.0’, ‘5.0’, ‘3.0’, ‘6.0’, ‘4.0’, ‘2.0’, ‘4.0’, ‘5.0’, ‘3.0’, ‘4.0’, ‘6.0’, ‘4.0’, ‘5.0’, ‘2.0’, ‘6.0’, ‘3.0’, ‘max_floors’, ‘4.0’, ‘3.0’, ‘5.0’, ‘5.0’, ‘3.0’, ‘3.0’, ‘4.0’, ‘5.0’, ‘2.0’, ‘3.0’, ‘3.0’, ‘3.0’, ‘4.0’, ‘6.0’, ‘6.0’, ‘2.0’, ‘min_extra_floors’, ‘0.0’, ‘4.0’, ‘4.0’, ‘5.0’, ‘1.0’, ‘3.0’, ‘5.0’, ‘1.0’, ‘2.0’, ‘3.0’, ‘2.0’, ‘0.0’, ‘0.0’, ‘4.0’, ‘2.0’, ‘2.0’, ‘max_extra_floors’, ‘5.0’, ‘5.0’, ‘2.0’, ‘2.0’, ‘5.0’, ‘5.0’, ‘4.0’, ‘3.0’, ‘3.0’, ‘1.0’, ‘1.0’, ‘4.0’, ‘5.0’, ‘2.0’, ‘3.0’, ‘1.0’] |
| Num. Individual | 57 | 26 | 81 | Barcelona’s Current Situation (BCS) | Cerdà Original Plan (COP) |
|---|---|---|---|---|---|
| CY—Courtyard exposure (#faces) | 1813 | 5158 | 6569 | 5788 | 5379 |
| B—Building exposure (#faces) | 3473 | 2620 | 2069 | 1491 | 2945 |
| C—Connectivity (value) | 43 | 30 | 23 | 24 | 39 |
| DE—Density (hab/km2) | 9544 | 17,259 | 23,596 | 34,500 | 10,400 |
| Num. Individual | 2 | 54 | 52 | BCS | COP |
|---|---|---|---|---|---|
| CY—Courtyard exposure (#faces) | 3604 | 3117 | 3632 | 5788 | 5379 |
| B—Building exposure (#faces) | 2839 | 2933 | 2876 | 1491 | 2945 |
| C—Connectivity (value) | 29 | 29 | 29 | 24 | 39 |
| DE—Density (hab/km2) | 14,924 | 16,146 | 14,616 | 34,500 | 10,400 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navarro-Mateu, D.; Makki, M.; Cocho-Bermejo, A. Urban-Tissue Optimization through Evolutionary Computation. Mathematics 2018, 6, 189. https://doi.org/10.3390/math6100189
Navarro-Mateu D, Makki M, Cocho-Bermejo A. Urban-Tissue Optimization through Evolutionary Computation. Mathematics. 2018; 6(10):189. https://doi.org/10.3390/math6100189
Chicago/Turabian StyleNavarro-Mateu, Diego, Mohammed Makki, and Ana Cocho-Bermejo. 2018. "Urban-Tissue Optimization through Evolutionary Computation" Mathematics 6, no. 10: 189. https://doi.org/10.3390/math6100189