1. Introduction
The cable is an efficient structural system because of its light weight and high load-bearing capacity. In fact, cables are frequently used in structural applications such as, for example, suspended and stayed bridges, transmission and electrical lines, and cable-ways. In the last decades, several scientific books and papers have been published on this topic, dealing with both statics and dynamics of horizontal or inclined cables; comprehensive reviews on the cable mechanics in both deterministic and stochastic fields are found in [
1,
2,
3].
Focusing the attention to the case of inclined cables, statics are studied in [
4], where the balance equations and the parametric implicit expression for the solution of the elastic catenary are shown; moreover, analysis for cables in the case of a flat profile is carried out. Static analysis of inclined cables is also performed in [
5], as a starting point for further studies on the dynamics of cables embedded in quiescent viscous fluids; there, reference to the solution of the static catenary is given to [
6]. Free nonlinear dynamics are analyzed under different conditions in [
7,
8,
9], where the static approximate equilibrium configuration is taken from [
4]. The dynamics of inclined cables are addressed in [
10] in the case of taut conditions, using as a key factor the small sag-to-span ratio. In [
11], the static balance equations for an inclined cable are addressed in order to obtain the condition for which the dynamic and static axial strains remain sufficiently small, as a prerequisite to study the superharmonic response of a reduced 2 degrees of freedom (d.o.f.) model. An efficient spatial catenary cable element for the nonlinear analysis of cable-supported structures is proposed in [
12], while nonlinear dynamics of a cable coupled to a horizontal beam as a simplified model of a cable-stayed bridge is considered in [
13], founding the evaluations on the model proposed in [
14]. Besides nonlinear dynamic analysis, exact static equations considering also the Poisson effect are obtained in [
15], where a numerical procedure is suggested in the case of a generic load, while the catenary solution is evaluated when the sole weight is applied. Furthermore, inclined cables are the object of attention for researchers analyzing combined dynamic excitation, as a result of, for example, steady wind-inducing galloping and/or base motion [
16,
17,
18,
19,
20], while a consistent model of a cable-beam to take into account the swing and the twist of iced cables under steady wind is presented in [
21,
22,
23]. Perturbation methods are extensively used in [
24,
25] for the dynamic control of taut stings and in [
26] for nonlinear dynamic analysis of suspended cables.
Although an analytical solution for general loads, as we have stated, is available in the literature, it however calls for numerical evaluation of some definite integrals, which cannot be expressed in terms of elementary functions. On the other hand, in technical applications, inclined cables are often shallow, so that one can hope to obtain simpler asymptotic expressions able to describe their static response with a desired degree of accuracy. Such a solution, moreover, could be of some interest in view of further analysis devoted to investigate the dynamic behavior of the cable around the equilibrium state.
In this paper, we try to give a first answer to the problem, by confining our attention to the statics of cables under forces exclusively vertical but not necessary uniform. The case, although limited, seems to be of interest in dealing, for example, with cable-ways or suspended bridges, for which point-loads, in addition to the self-weight, act on the cable. In particular, an asymptotic expression for the solution of the elastic problem is sought after designing a consistent perturbation method, which requires a suitable rescaling of the involved parameters and makes use of the taut-string solution as the generator system. Specifically, we carry out the analysis by following the Cartesian representation, more popular in the engineering community, in which the planar response of the cable is expressed in the form rather than the more natural parametric representation , in which the equations are originally formulated. The choice is made in order to show how the asymptotic solution incorporates, as the lowest approximation, a technical solution well known in literature, whose internal consistency has, in our opinion, not been sufficiently discussed. Finally, with the aim of validating the procedure, the outcomes of the perturbation method are compared with numerical solutions for the two case studies. The goal of the paper is (a) to show how to consistently improve technical solutions at any desired orders, and (b) to gain insight into the mechanical behavior of shallow cables, in light of the asymptotic solution.
The paper is organized as follows. In
Section 2 the exact equations governing the static problem for an elastic sagged cable are formulated. Then, they are specialized to the case of vertical loads and transformed into the Cartesian form. The simplified analyses usually followed in literature are revisited in
Section 3. A perturbation algorithm is illustrated in
Section 4. Case studies are considered for illustrative purposes, and numerical results are obtained in
Section 5, where the asymptotic solution is also compared with a numerical solution. Finally, some conclusions are drawn in
Section 6.
3. Simplified Analysis for Shallow Elastic Cables
There exist some simplifying assumptions, commonly adopted in literature, to evaluate the response of the cable. These hold when the cable is shallow (or flat), that is, when its profile is quite close to the chord. We shortly review these, by distinguishing horizontal () from inclined () cables.
3.1. Horizontal Cables
When the shallow cable is horizontal, the length of the element
can be confused with that of its projection
; that is,
, so that
; moreover,
. As a further hypothesis, the strain is neglected in the equilibrium equation. Therefore, from Equation (
14),
follows; that is, the load is configuration independent. In other words, in this approximation, the loads, which are distributed along the cable, are thought of as applied to the chord while
remaining unaltered. Consequently, the funicular equation and the boundary conditions become
Because this is a linear problem, it is easily integrable, furnishing , which is parametrically dependent on H (still unknown).
Concerning the integral compatibility condition of Equation (
15)-d, it is approximated by the following [
4]:
somewhat relaxing the previous hypotheses and neglecting the small term
, which affects the (also) small term
. This has a clear mechanical meaning: the length of the profile (integral term) must be equal to the natural length augmented by the total extension, evaluated as if the cable were rectilinear, and solicited by a constant tension
.
When the solution
is substituted into Equation (
20), an algebraic equation for the
H unknown is derived, finally solving the problem.
3.2. Inclined Cables
When the shallow cable is inclined, the length of the element
can still be confused with its projection onto the chord; that is,
, from which
. However,
is no longer small, and its square cannot be neglected with respect to 1. On the other hand,
, which still allows a strong simplification of the expression for Equation (
14) of the load. By neglecting, as usual, the effect of strain on the equilibrium, the funicular equation and the boundary conditions read as
Once again, the loads are distributed along the chord (instead of the cable), with no alteration, except for the clear fact that they are expressed in terms of the horizontal abscissa instead of the abscissa running along the chord itself. Because the funicular equation is still linear, it can easily be integrated.
The kinematics follows the same step as before, but taking
in the elastic term, leading to the updated integral compatibility condition:
The same mechanical interpretation as for the horizontal cable holds, with the extension now caused by a constant tension .
3.3. Discussion
The procedure so far illustrated remarkably simplifies the problem and holds well in view of technical applications. However, it triggers some questions, namely, the following:
To give answers to these questions, it is necessary to implement a perturbation procedure, able to give asymptotic solutions at any orders, and to estimate the order of magnitude of the truncation error. We accomplish this task in the next section.
4. A Perturbation Algorithm for Shallow Elastic Cables
We solve the problem of Equation (
15) by a perturbation method based on the fact that the cable, by hypothesis, is shallow. We introduce a perturbation parameter by letting
with
being the length-to-chord relative difference. As a result of shallowness,
. It is easy to see that, irrespectively of the configuration of the cable, provided it is compatible with the boundary conditions,
; that is, it is of the order of the squared
sag-to-chord ratio, with
being the maximum normal distance between the cable profile and the chord. Thus, if we take
as a small book-keeping parameter, we can consistently perform the rescaling
. Moreover, we notice that, in the limit
, the cable becomes a string, taut between the supports, so that the tension diverges to infinity if the loads are kept constant. To avoid divergence, we also rescale the load as
. Finally, we rescale the elastic term in such a way that the unit extension is of the same order of the length-to-chord difference; that is,
.
The rescaled problem, therefore, assumes the form
To solve it, we introduce the following series expansions:
In these, the current configuration is expressed as a perturbation of the straight line connecting the two endpoints.
4.1. Expanding Kinematics
Kinematics is addressed first. Substitution of the series given by Equation (
25)-a in the boundary conditions leads to
By using both the series given by Equation (
25) in
, as given by Equation (
10), we have the following, for
:
When this is integrated from 0 and
x and the boundary conditions
are accounted for, an asymptotic expression for the curvilinear abscissa is obtained:
When, instead,
is used in the integral compatibility condition of Equation (
24)-d and the boundary conditions are satisfied at both ends, the following perturbation equations are derived:
We note that the first meaningful equation appears at the -order; additionally, and importantly, it does not depend on ; similarly, the -order equation does not depend on .
4.2. Expanding Equilibrium
As a second step, we evaluate the load. First, by using Equation (
28), the expression of the load becomes
and expanding it with respect to
, we have
Then, according to Equation (
14), we obtain
where
The first term represents the s-load, thought of as applied to the chord instead of to the cable, and expressed in terms of the horizontal abscissa. The second term accounts for two corrections: (a) the first-order difference between the unknown profile and the chord, in which, however, the load density is kept unaltered; and (b) the first-order change in density. Higher-order terms account for more accurate descriptions of these latter effects.
By using the previous results, we draw the following perturbation equations for equilibrium:
Moreover, the modulus of the tension
, given by Equation (
9), becomes
where
4.3. Solution
The solution to the
-order equilibrium, Equation (
34)-a, reads as
where
are the first and second primitives of
(
), respectively. We note that
is undetermined at this order.
By going to the
-order, we have an equilibrium equation for
(Equation (
34)-b plus a compatibility condition, Equation (
29)-c). However, the latter is independent of
; therefore we can start tackling it. By replacing in Equation (
29)-c the expression of
, obtained from the differentiation of Equation (
37), we obtain
which is a degree-3 algebraic equation for
. From the Descartes rule, because there is just a variation in the sign of the coefficients, irrespectively of the sign of
, only one positive solution exists (as for the catenary case; see [
4]).
We note that a small coefficient multiplies the cubic power of
in Equation (
39), so that the local compatibility equation turns out to manifest a singular nature. As a further comment, up to this this order, the obtained equations coincide with the solution of the simplified model given in Equation (
21).
With
now known, we can compute the expression of
and write the equilibrium equation at the
-order; it becomes
whose solution is
Again,
is undetermined at this order, and its evaluation calls for the
-compatibility condition, Equation (
29)-d, which reads as
As a further step, the solution at order
can be evaluated from Equation (
34-c), resulting in
where the undetermined parameter
is obtained as the solution of the
-order compatibility Equation (
29)-e, whose final expression is not shown here for the sake of brevity.
4.4. The Horizontal Cable
If the supports are at the same level (
), the analysis considerably simplifies. As a matter of fact,
,
, and
; therefore the equilibrium perturbation equations become
The second-order compatibility condition reads as
The same equation at the third order reads as
and at the fourth order:
6. Conclusions
The goal of this paper is to propose a perturbation scheme able to produce an asymptotic expression for the displacement and tension of an elastic, inclined cable under the action of vertical static forces. The scheme is applied after manipulation of the equilibrium and compatibility equations, in which the independent variable is taken as the horizontal projection of the chord.
At the various perturbation orders, a linear, non-homogeneous boundary value problem, representing the vertical equilibrium equation, is required to be solved, as well as an algebraic equation, nonlinear just at the first order, expressing the kinematic compatibility condition.
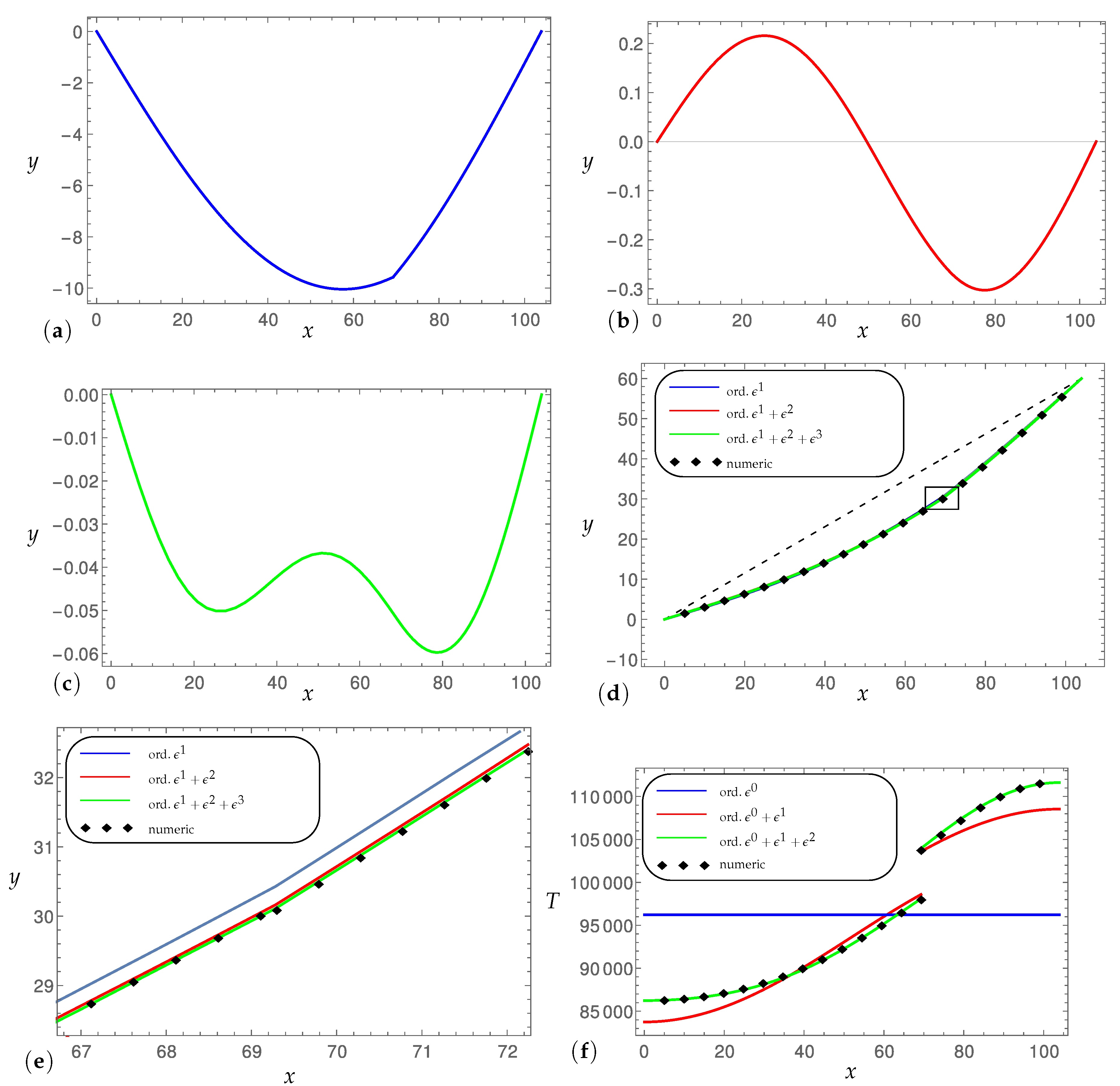
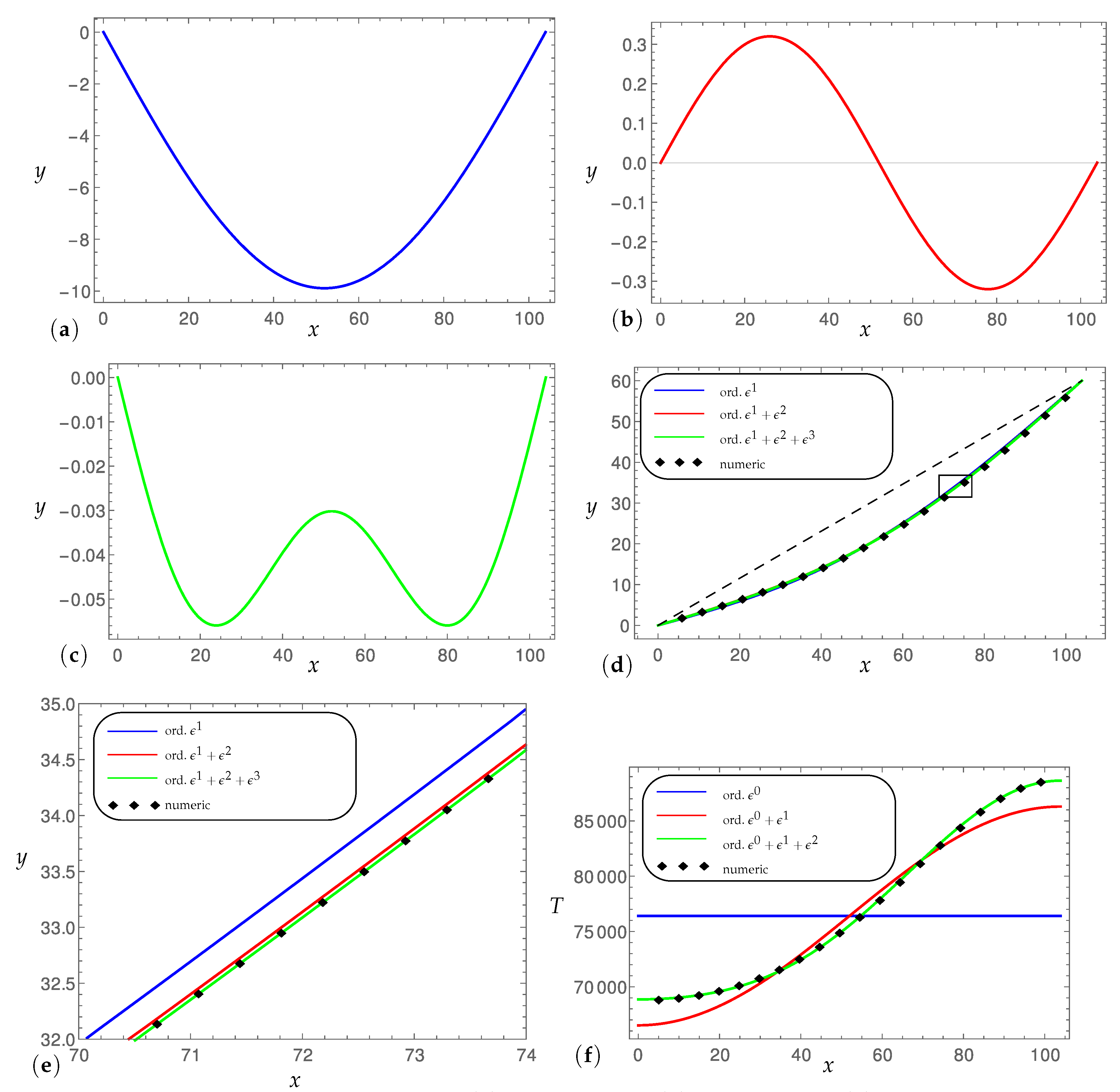
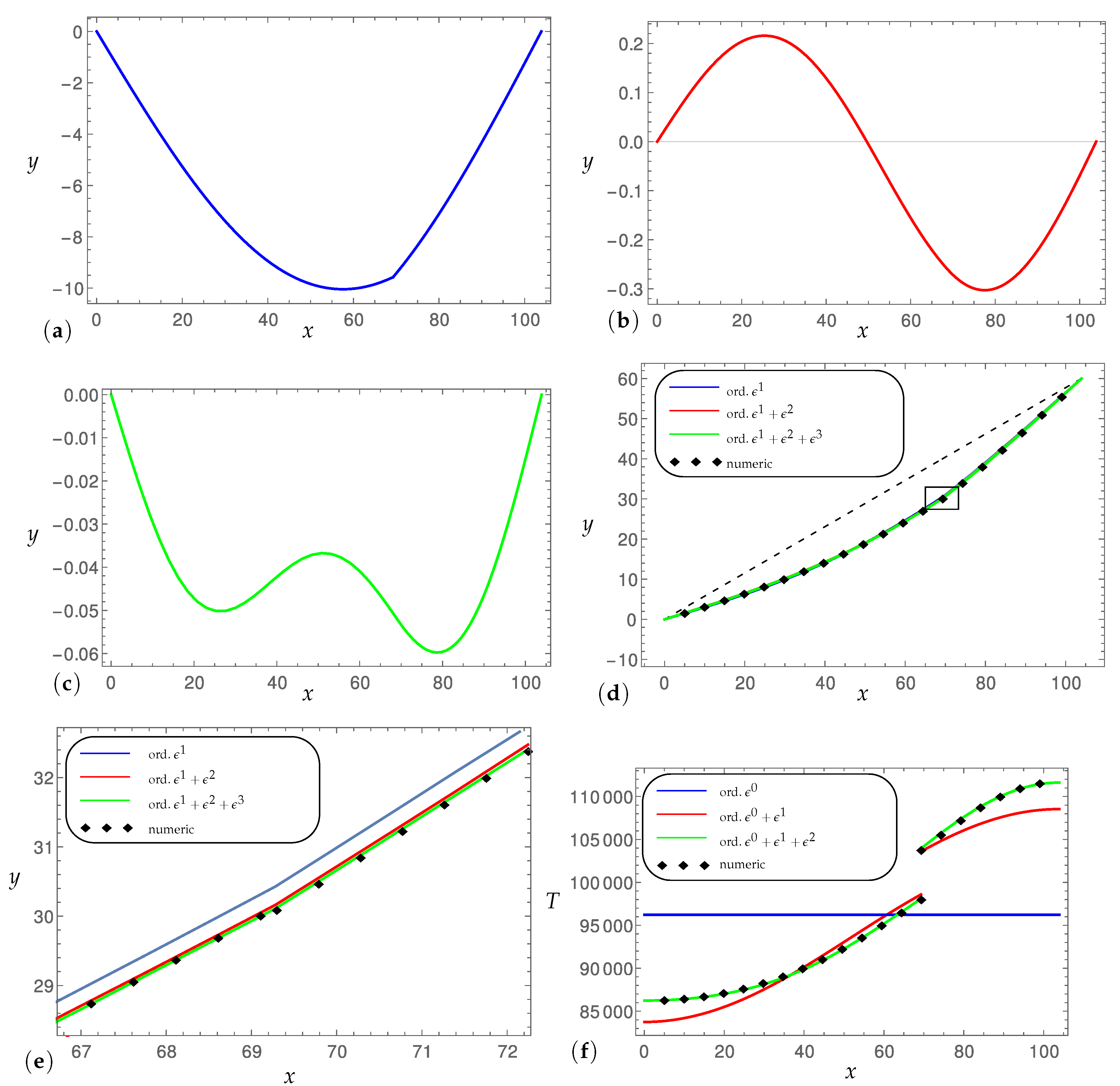
It turns out that the algorithm, at the first perturbation order, produces the equations (and relevant solutions) of the simplified model often used in engineering applications, whereas the further perturbation orders introduce more refined corrections. In particular, from two case studies, it is highlighted how, on the one hand, the configuration described by the first-order solution is a good approximation of the numerical solution but, on the other hand, the tension requires higher-order approximations to correctly fit the numerical results.
Moreover, as a further (and future) development, the proposed method may in fact be useful to give an answer to the following questions, of historical interest in engineering applications: (a) How small should the distance between the cable and its chord be, in order to consider the cable as shallow? (b) When could elasticity be neglected, in order to further simplify the problem?
As a final comment, the strong hypothesis of the presence of exclusively vertical loads might be removed and the perturbation method also applied, after the projection of the equations onto a different basis, as will be the object of further research.



{kind=link}
{kind=link}