
Design, Operation, Control, and Economics of a Photovoltaic/Fuel Cell/Battery Hybrid Renewable Energy System for Automotive Applications


Abstract
:1. Introduction

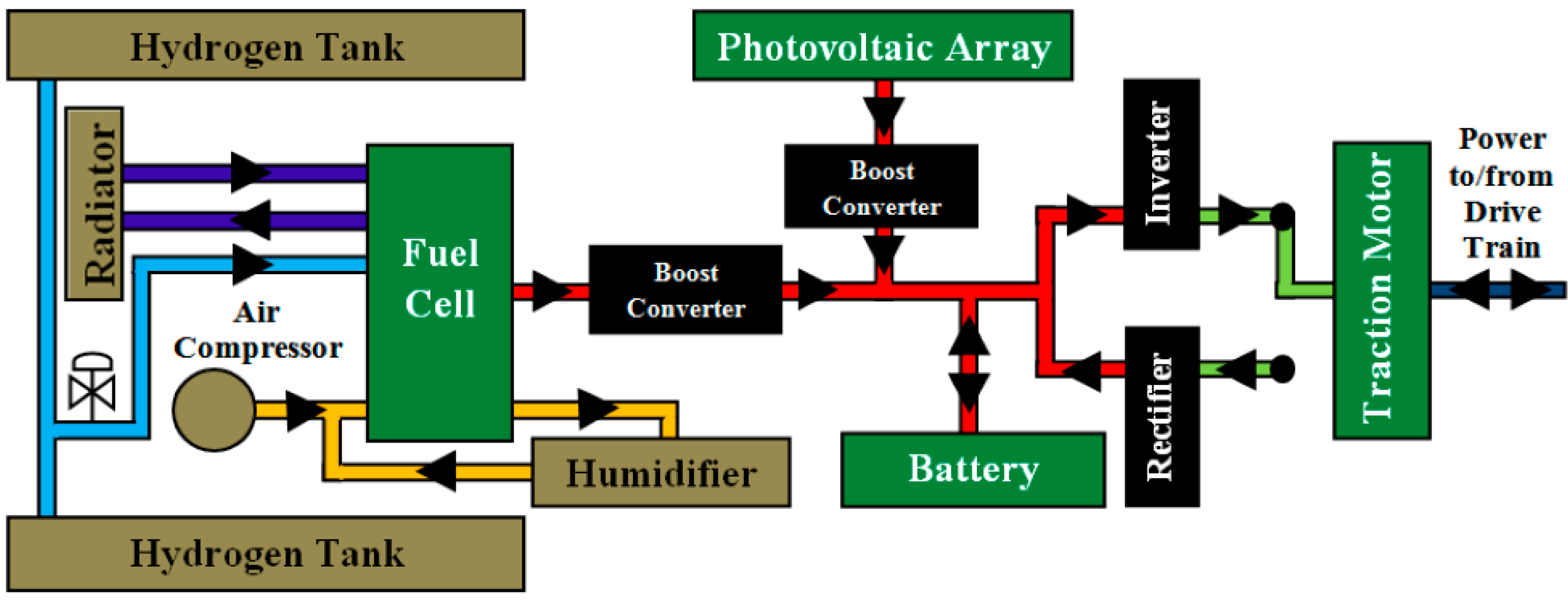
2. The Process: Component Description, Modeling, and Simulation

3. Control Strategies
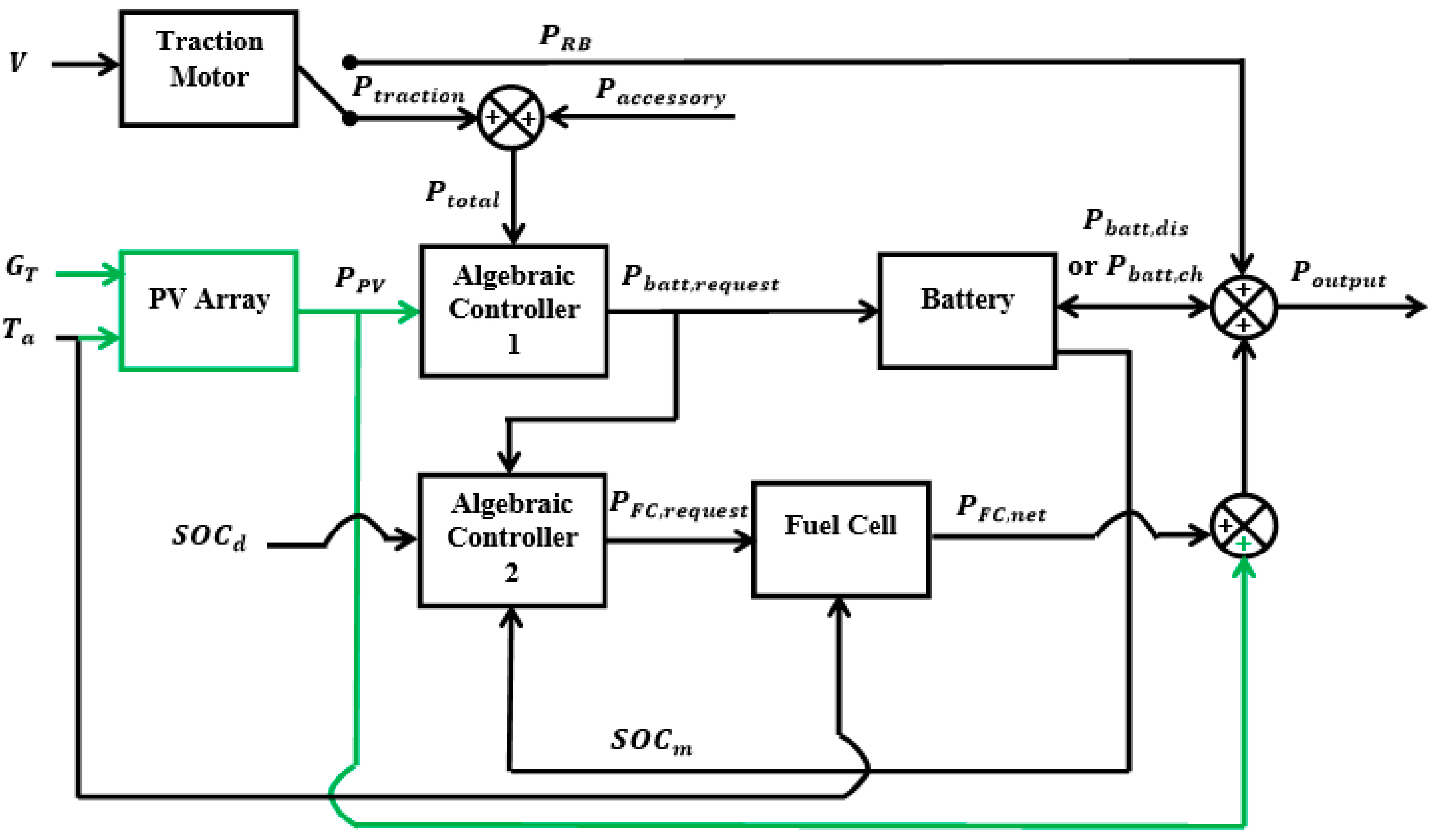
3.1. Control System Configuration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control loop | Manipulated variable (MV) | Controlled variable (CV) | CV setpoints | Disturbance variables (DVs) |
|---|---|---|---|---|
| 1 | Pbatt,request | Poutput | Ptotal | PPV |
| 2 | PFC,request | SOCm | SOCd | Ppv,excess and PRB |
3.2. Algebraic Control Strategy

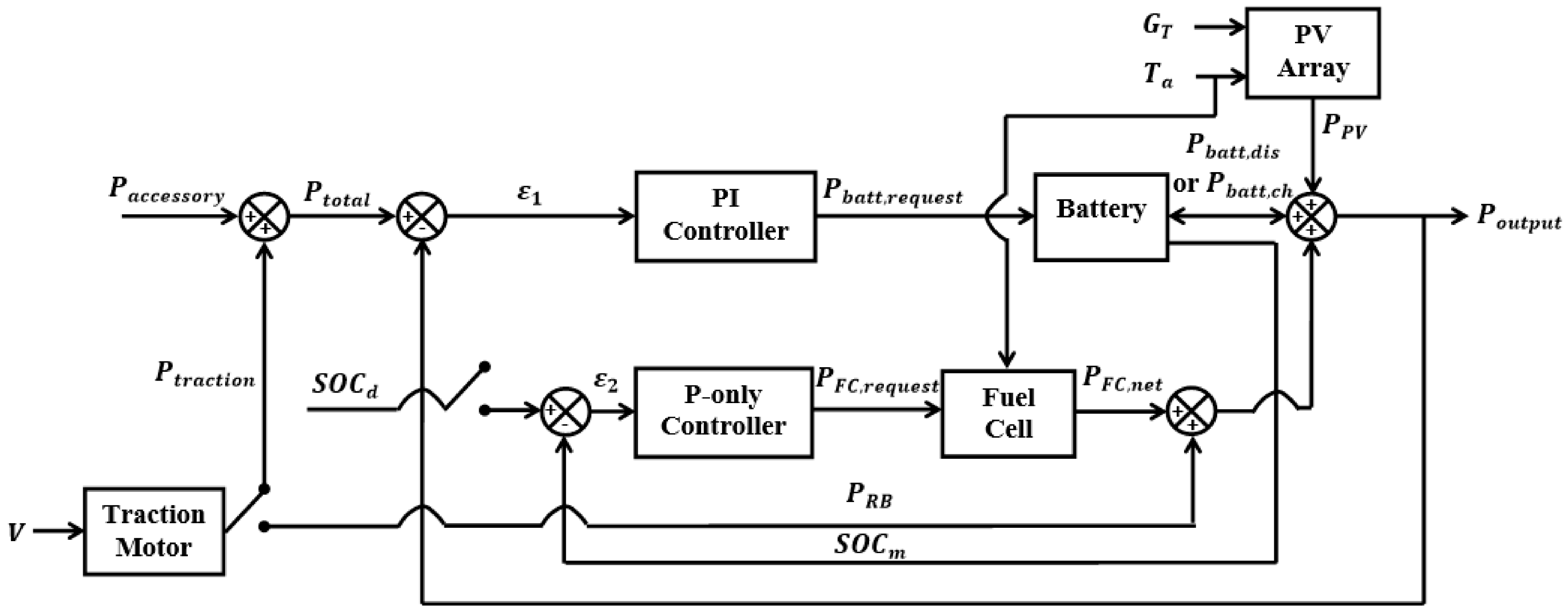
3.3. PI Control Strategy

4. Control Strategy Performance Evaluation
- (1)
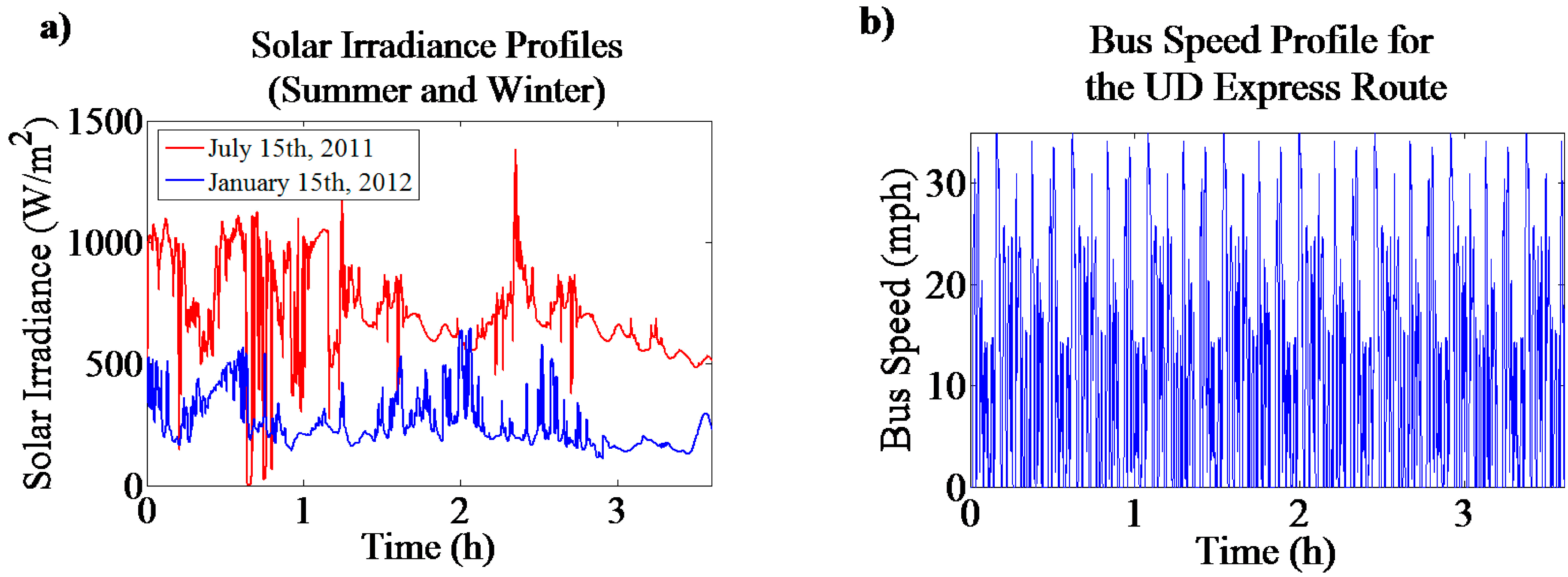
- Typical operating conditions (solar irradiance, vehicle speed, and ambient temperature) during summer and winter.
- (2)
- Conditions of sudden changes in cloud cover.
- (3)
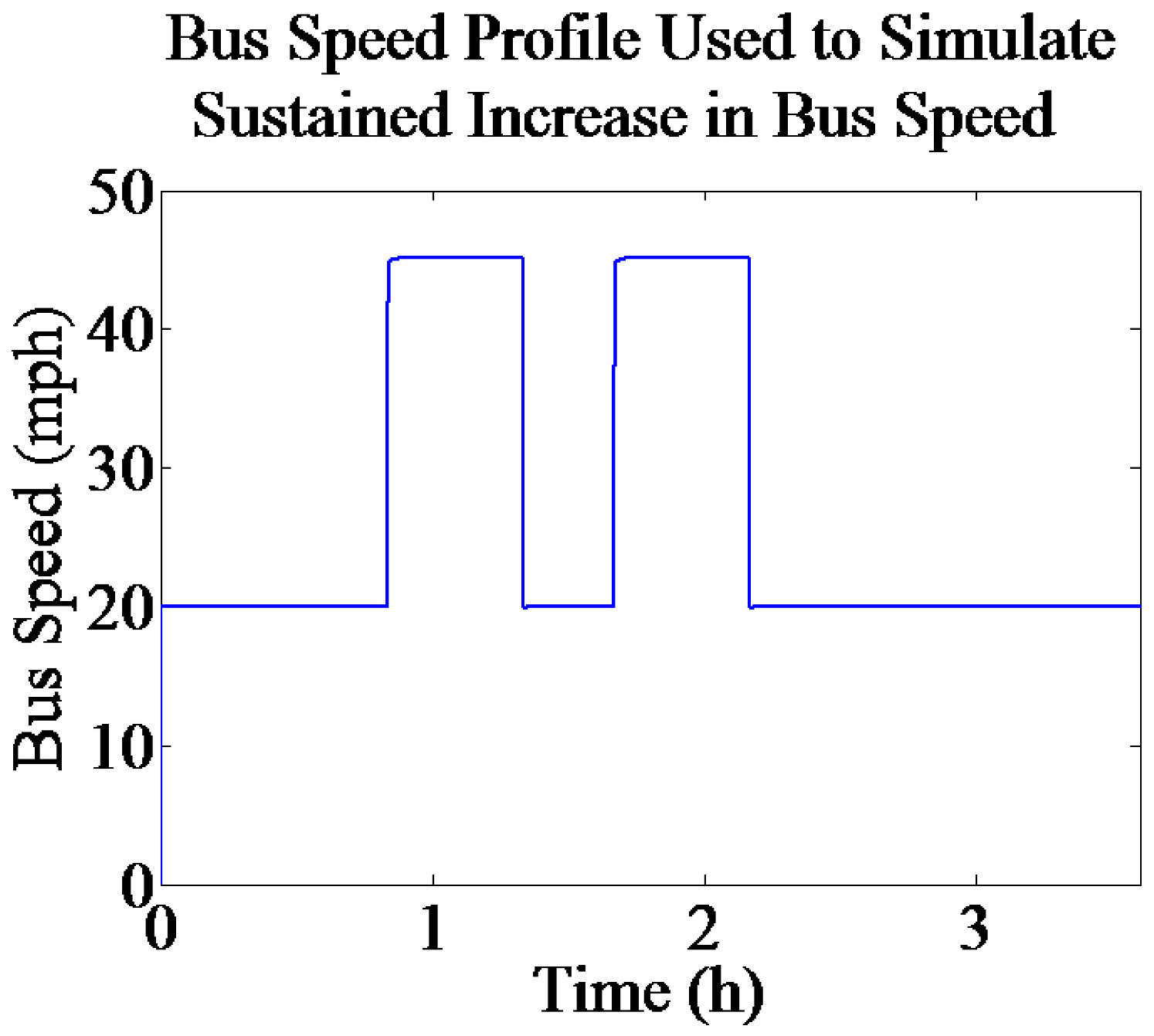
- Conditions of sustained increase in bus speed.
- (1)
- Each PV array module is exposed to the same solar irradiance and ambient temperature.
- (2)
- The DC/DC converters, the inverter, and the rectifier operate at steady state, and at 90% efficiency.
- (3)
- The battery is fully charged at the beginning of each simulation.
- (4)
- The accessory power demand is constant at 3 kW.
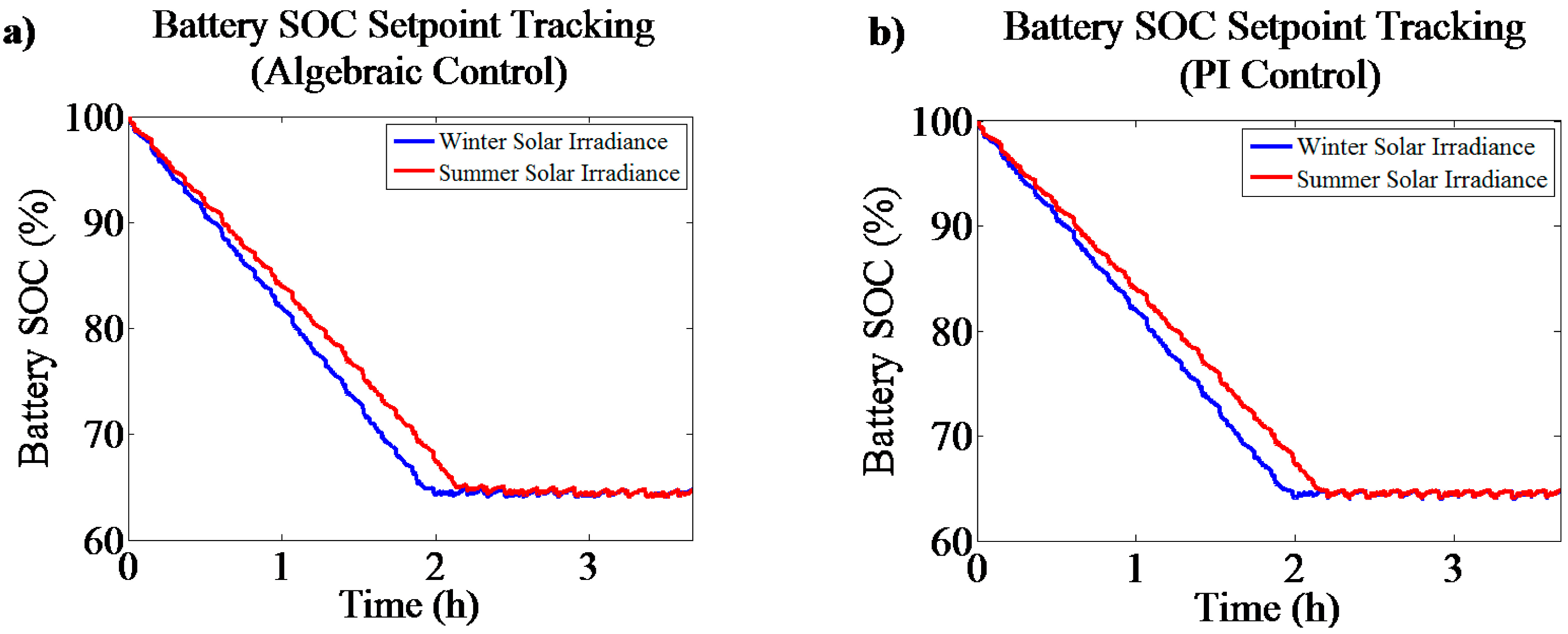
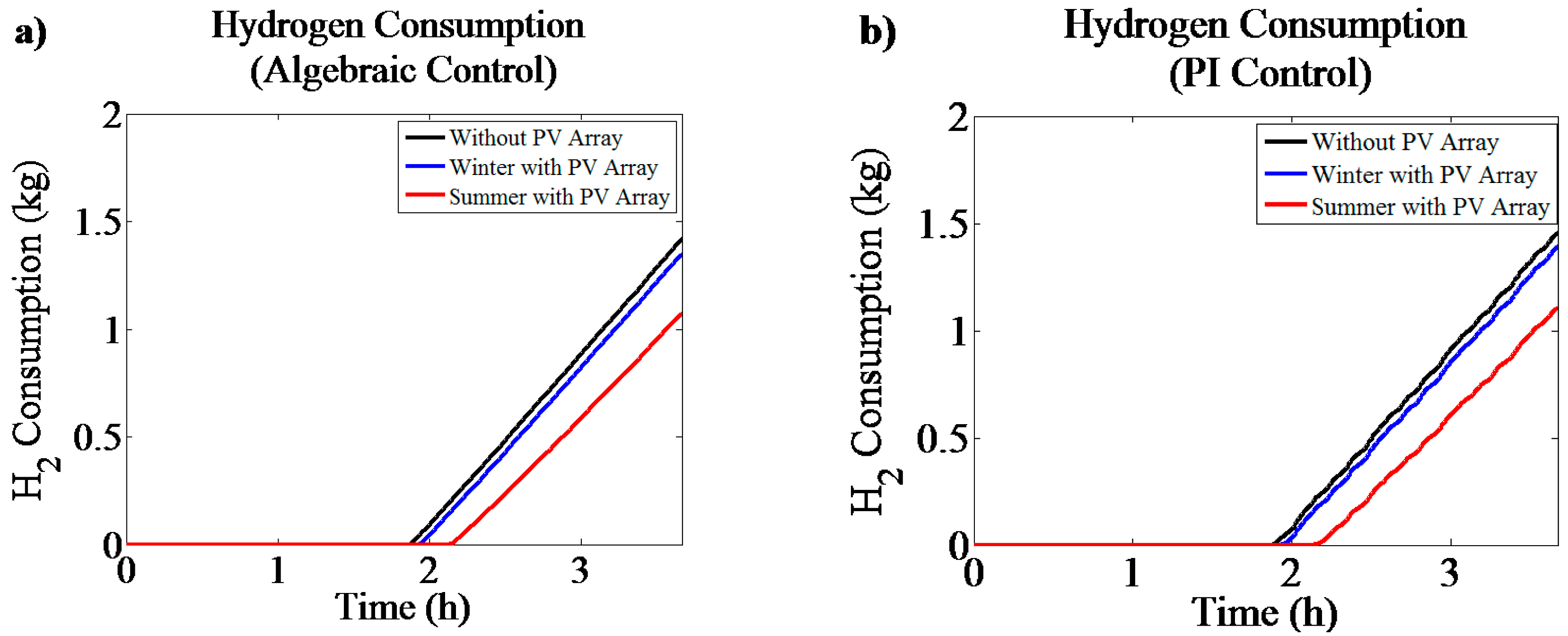
4.1. Typical Operating Conditions




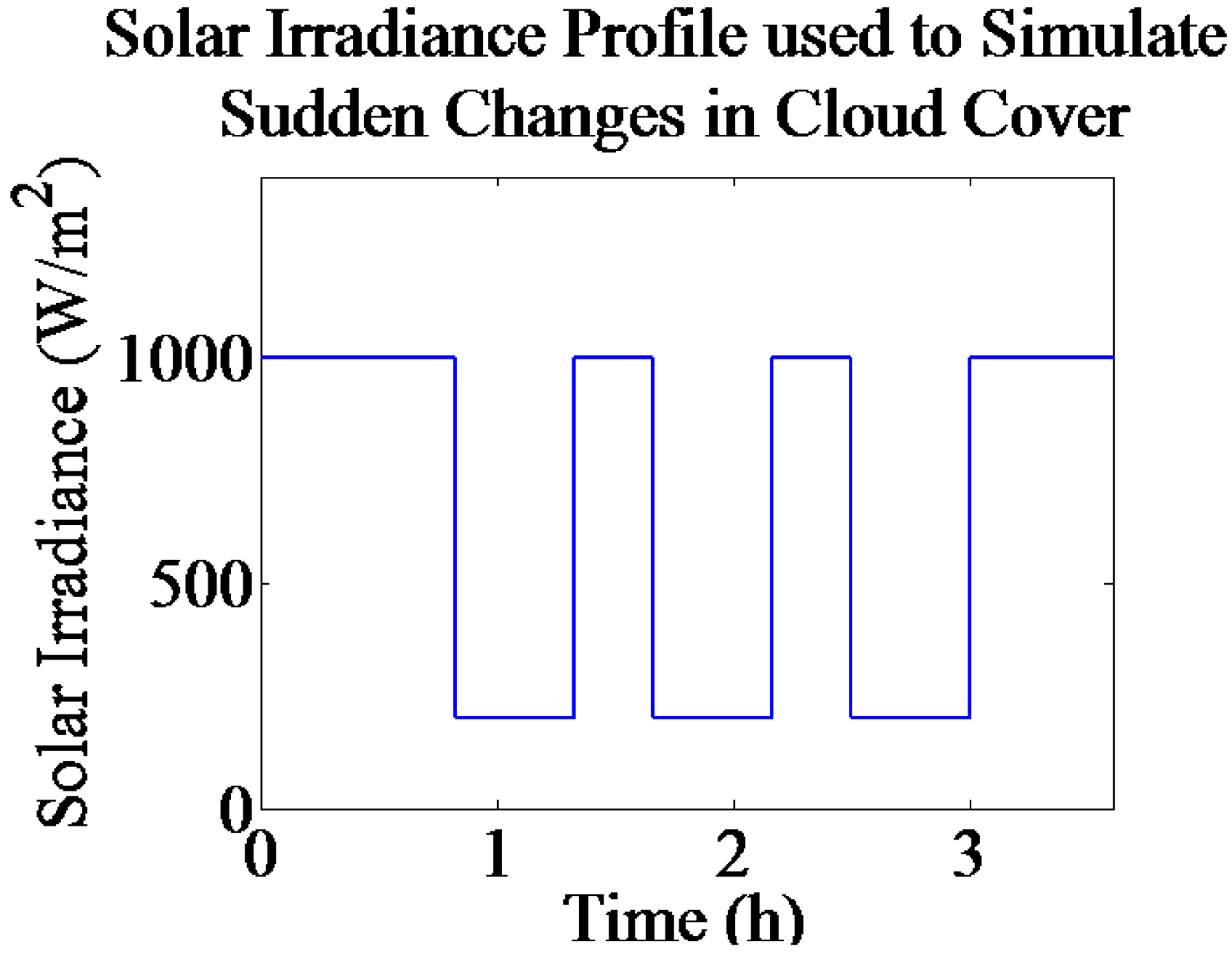
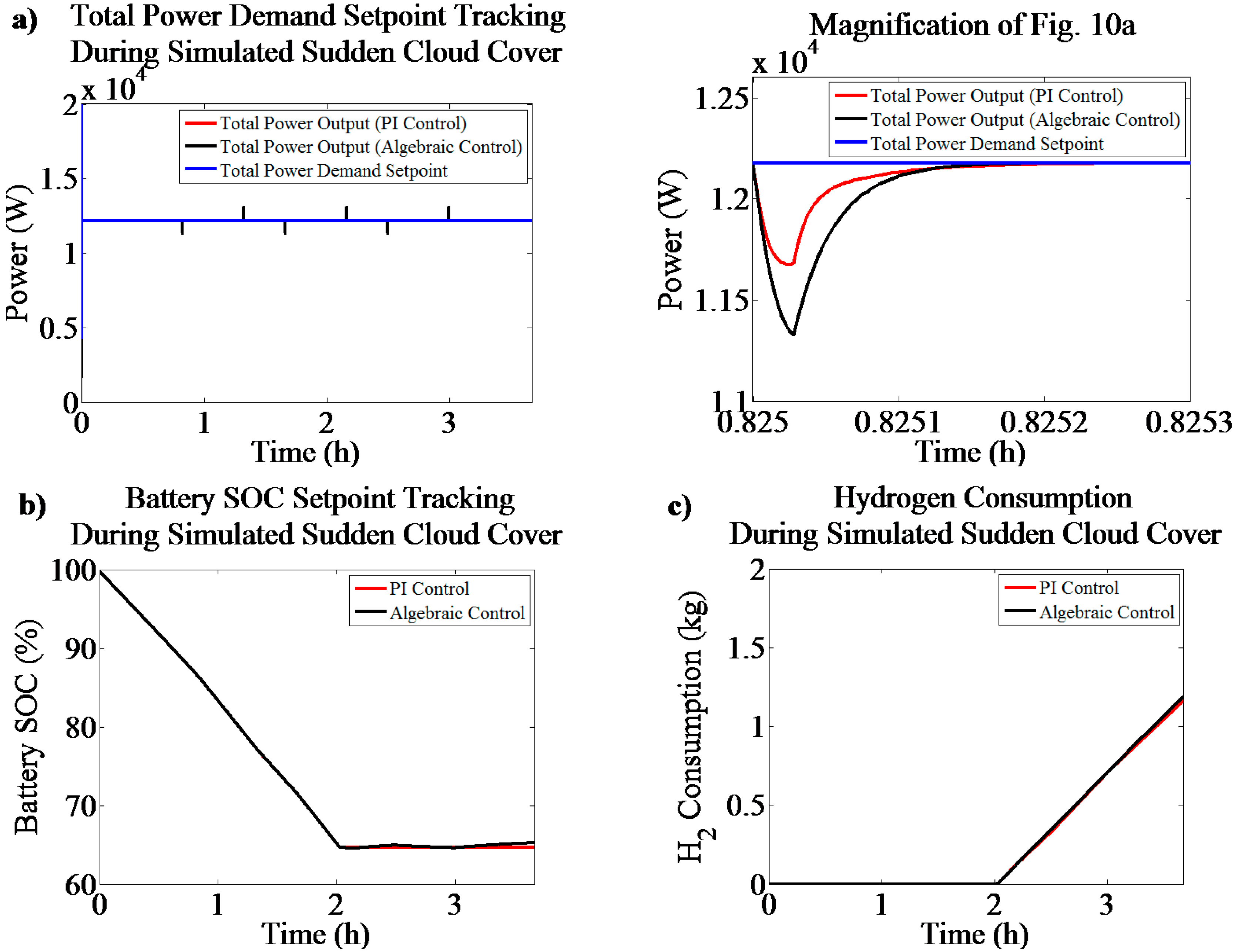
4.2. Sudden Changes in Cloud Cover


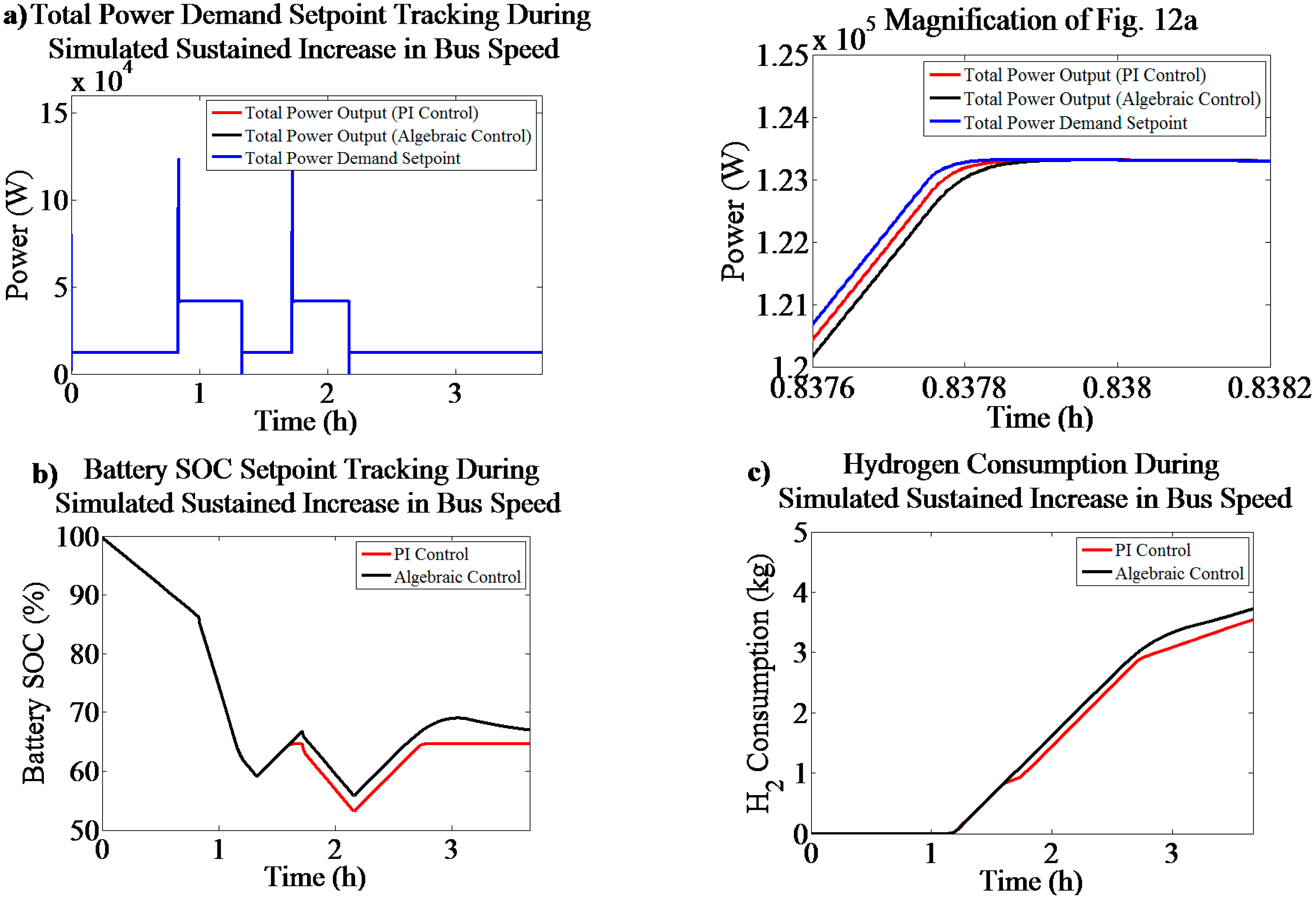
4.3. Sustained Increases in Bus Speed


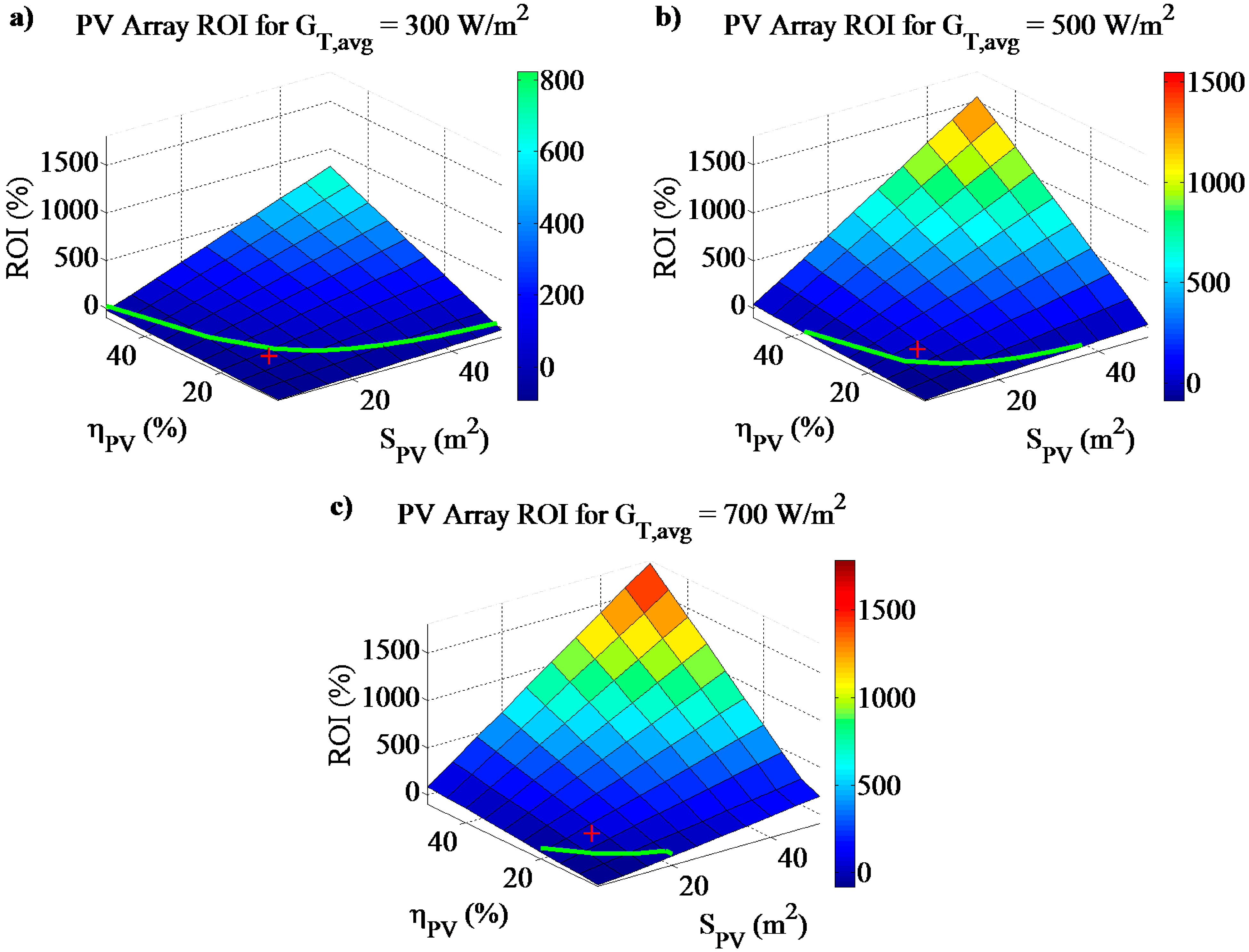
5. Economic Analysis
- (1)
- The total cost (the sum of capital, shipping, and installation costs) of the PV array is $4810 (Capital cost = $475 per PV module, shipping cost = $60, and installation cost = 25% of module cost).
- (2)
- (3)
- Cost of hydrogen remains constant at $3.43/kg [29].
- (4)
- The bus operates only on 60% of the days in a year (from average bus availability reported for fuel cell hybrid shuttle buses in 2014; [30]).
- (5)
- The bus’s operational lifetime is 12 years (DOE 2016 target, [30]).
- (6)
- The battery is fully charged at the start of each shuttle run.
- (7)
- The bus operates under PI control.

6. Summary and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Abus | Bus availability [frac.] |
| β | proportionality constant in the “algebraic control” equation [W/%] |
| CH2 | cost of hydrogen [$·kg−1] |
| CPV | cost of the PV array [$] |
| ε1 | feedback error in control loop 1, the difference between the total power set point and the combined battery and photovoltaic power [W] |
| ε2 | feedback error in control loop 2, the difference between the battery SOC set point and the measured battery SOC [%] |
| GT | solar irradiance [W·m−2] |
| GT,avg | average solar irradiance during bus operation [W·m−2] |
| ηPV | PV array efficiency [%] |
| Ki | integral gain of the total power PI controller [s−1] |
| KP1 | proportional gain of the total power PI controller [N/A] |
| KP2 | proportional gain of the battery SOC controller [kg·s−1·%] |
| Lbus | bus lifetime [years] |
mass of hydrogen consumed per day by the bus with a PV array [kg] | |
mass of hydrogen consumed per day by the bus without a PV array [kg] | |
| Paccessory | accessory power demand on the bus [W] |
| Pavg | one-hour time average net battery power [W] |
| Pbatt,ch | combined power from the fuel cell, regenerative braking, and PV array, used to charge the battery [W] |
| Pbatt,request | battery power requested by the controller in order to meet residual bus power demand unmet by the PV array [W] |
| Pbatt,dis | battery discharge power [W] |
| PFC,net | net fuel cell power output [W] |
| PFC,request | fuel cell power requested by the controller in order to maintain the battery SOC [W] at the desired value |
| PPV | power produced by the PV array [W] |
| PPV,excess | excess PV power remaining after meeting bus power demand [W] |
| PRB | power produced from regenerative braking [W] |
| Ptotal | total bus power demand (sum of traction and power demands) [W] |
| Ptotal,m | total system power output [W] |
| Ptraction | bus traction power demand [W] |
| SOCd | desired battery SOC [%] |
| SPV | PV array size [m2] |
| SOCm | measured battery SOC [%] |
| Ta | ambient temperature [K] |
| V | bus velocity [m/s] |
References
- Breakthrough Technologies Institute. 2010 Fuel Cell Technologies Market Report; U.S. Department of Energy: Washington, DC, USA, 2011.
- Basi, J.; Farquharson, N. PEM Fuel Cells Make a Powerful Case for Small Business Backup; CommScope: Hickory, NC, USA, 2014. [Google Scholar]
- Mekhilef, S.; Saidur, R.; Safari, A. Comparative study of different fuel cell technologies. Renew. Sustain. Energy Rev. 2012, 16, 981–989. [Google Scholar] [CrossRef]
- Kordesch, K.V.; Simader, G.R. Environmental Impact of Fuel Cell Technology. Chem. Rev. 1995, 95, 191–207. [Google Scholar] [CrossRef]
- Bubna, P.; Brunner, D.; Gangloff, J.J., Jr.; Advani, S.G.; Prasad, A.K. Analysis, operation and maintenance of a fuel cell/battery series-hybrid bus for urban transit applications. J. Power Sources 2010, 195, 3939–3949. [Google Scholar] [CrossRef]
- Divya, K.C.; Østergaard, J. Battery energy storage technology for power systems—An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Nelson, R.F. Power requirements for batteries in hybrid electric vehicles. J. Power Sources 2000, 91, 2–26. [Google Scholar] [CrossRef]
- Bergveld, H.J.; Kruijt, W.S.; Notten, P.H.L. Battery Management Systems: Design by Modelling; Toolenaar, F., Ed.; Springer: Eindhoven, The Netherlands, 2002. [Google Scholar]
- Hofman, T.; Steinbuch, M.; van Druten, R.; Serrarens, A. Rule-Based energy management strategies for hybrid vehicles. Int. J. Electr. Hybrid Veh. 2007, 1. [Google Scholar] [CrossRef]
- Baumann, B.M.; Washington, G.; Glenn, B.C.; Rizzoni, G. Mechatronic design and control of hybrid electric vehicles. IEEE/ASME Trans. Mechatron. 2000, 5, 58–72. [Google Scholar] [CrossRef]
- Won, J.-S.; Won, J.-S.; Langari, R.; Langari, R. Fuzzy torque distribution control for a parallel hybrid vehicle. Expert Syst. 2002, 19, 4–10. [Google Scholar] [CrossRef]
- Hofman, T. Rule-Based equivalent fuel consumption minimization strategies for hybrid vehicles. In Proceedings of the International Federation of Automatic Control, Seoul, Korea, 6–11 June 2008; Volume 17, pp. 5652–5657.
- Li, X.; Xu, L.; Hua, J.; Lin, X.; Li, J.; Ouyang, M. Power management strategy for vehicular-applied hybrid fuel cell/battery power system. J. Power Sources 2009, 191, 542–549. [Google Scholar] [CrossRef]
- Li, C.Y.; Liu, G.P. Optimal fuzzy power control and management of fuel cell/battery hybrid vehicles. J. Power Sources 2009, 192, 525–533. [Google Scholar] [CrossRef]
- Bernard, J.; Delprat, S.; Guerra, T.M.; Büchi, F.N. Fuel efficient power management strategy for fuel cell hybrid powertrains. Control Eng. Pract. 2010, 18, 408–417. [Google Scholar] [CrossRef]
- Brahma, A.; Guezennec, Y.; Rizzoni, G. Optimal energy management in series hybrid electric vehicles. In Proceedings of the American Control Conference, Chicago, IL, USA, 29 June 2000; Volume 1, pp. 60–64.
- Xu, L.; Ouyang, M.; Li, J.; Yang, F. Dynamic Programming Algorithm for minimizing operating cost of a PEM fuel cell vehicle. In Proceedings of the 2012 IEEE International Symposium on Industrial Electronics (ISIE), Hangzhou, China, 28–31 May 2012; pp. 1490–1495.
- Paganelli, G.; Delprat, S.; Guerra, T.M.; Rimaux, J.; Santin, J.J. Equivalent consumption minimization strategy for parallel hybrid powertrains. In Proceedings of the IEEE 55th Vehicular Technology Conference, 7 May 2002; Volume 4, pp. 2076–2081.
- Delprat, S.; Lauber, J.; Guerra, T.-M.; Rimaux, J. Control of a parallel hybrid powertrain: Optimal control. Veh. Technol. IEEE Trans. 2004, 53, 872–881. [Google Scholar] [CrossRef]
- Feroldi, D.; Serra, M.; Riera, J. Energy Management Strategies based on efficiency map for Fuel Cell Hybrid Vehicles. J. Power Sources 2009, 190, 387–401. [Google Scholar] [CrossRef]
- Musardo, C.; Rizzoni, G.; Guezennec, Y.; Staccia, B. A-ECMS: An Adaptive Algorithm for Hybrid Electric Vehicle Energy Management. Eur. J. Control 2005, 11, 509–524. [Google Scholar] [CrossRef]
- Simmons, K.; Guezennec, Y.; Onori, S. Modeling and energy management control design for a fuel cell hybrid passenger bus. J. Power Sources 2014, 246, 736–746. [Google Scholar] [CrossRef]
- Schell, A.; Peng, H.; Tran, D.; Stamos, E.; Lin, C.C.; Kim, M.J. Modelling and control strategy development for fuel cell electric vehicles. Annu. Rev. Control 2005, 29, 159–168. [Google Scholar] [CrossRef]
- Bubna, P. Modeling, Simulation and Optimization of Fuel Cell/Battery Hybrid Powertrains. Ph.D. Thesis, University of Delaware, Newark, DE, USA, August 2010. [Google Scholar]
- Ro, K.; Rahman, S. Two-Loop controller for maximizing performance of a grid-connected photovoltaic-fuel cell hybrid power plant. IEEE Trans. Energy Convers. 1998, 13, 276–281. [Google Scholar]
- Ogunnaike, B.A.; Ray, W.H. Process Dynamics, Modeling, and Control; Oxford University Press: New York, NY, USA, 1994. [Google Scholar]
- Federal Incentives/Policies for Renewables and Efficiency—Residential Renewable Energy Tax Credit. Available online: http://www.dsireusa.org/incentives/incentive.cfm?Incentive_Code=US37F&re=0&ee=0 (accessed on 2 February 2015).
- Delaware Incentives/Policies for Renewables and Efficiency—Delaware Electric Cooperative—Green Energy Program Incentives (SRECs). Available online: http://www.dsireusa.org/incentives/incentive.cfm?Incentive_Code=DE20F&re=0&ee=0 (accessed on 2 February 2015).
- Bourbon, E. Clean Cities Alternative Fuel Price Report; U.S. Department of Energy: Washington, DC, USA, 2014.
- Eudy, L.; Post, M.; Gikakis, C. Fuel Cell Buses in U. S. Transit Fleets: Current Status 2014; National Renewable Energy Laboratory: Golden, CO, USA, 2014.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Whiteman, Z.S.; Bubna, P.; Prasad, A.K.; Ogunnaike, B.A. Design, Operation, Control, and Economics of a Photovoltaic/Fuel Cell/Battery Hybrid Renewable Energy System for Automotive Applications. Processes 2015, 3, 452-470. https://doi.org/10.3390/pr3020452
Whiteman ZS, Bubna P, Prasad AK, Ogunnaike BA. Design, Operation, Control, and Economics of a Photovoltaic/Fuel Cell/Battery Hybrid Renewable Energy System for Automotive Applications. Processes. 2015; 3(2):452-470. https://doi.org/10.3390/pr3020452
Chicago/Turabian StyleWhiteman, Zachary S., Piyush Bubna, Ajay K. Prasad, and Babatunde A. Ogunnaike. 2015. "Design, Operation, Control, and Economics of a Photovoltaic/Fuel Cell/Battery Hybrid Renewable Energy System for Automotive Applications" Processes 3, no. 2: 452-470. https://doi.org/10.3390/pr3020452
APA StyleWhiteman, Z. S., Bubna, P., Prasad, A. K., & Ogunnaike, B. A. (2015). Design, Operation, Control, and Economics of a Photovoltaic/Fuel Cell/Battery Hybrid Renewable Energy System for Automotive Applications. Processes, 3(2), 452-470. https://doi.org/10.3390/pr3020452