
Positive Almost Periodic Solutions for a Delayed Predator–Prey Model with Hassell-Varley Type Functional Response

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- is closed in ;
- .
- is bounded;
- is compact.
- (a)
- (b)
- (c)
- where is an isomorphism.
3. Results
- , , and ,
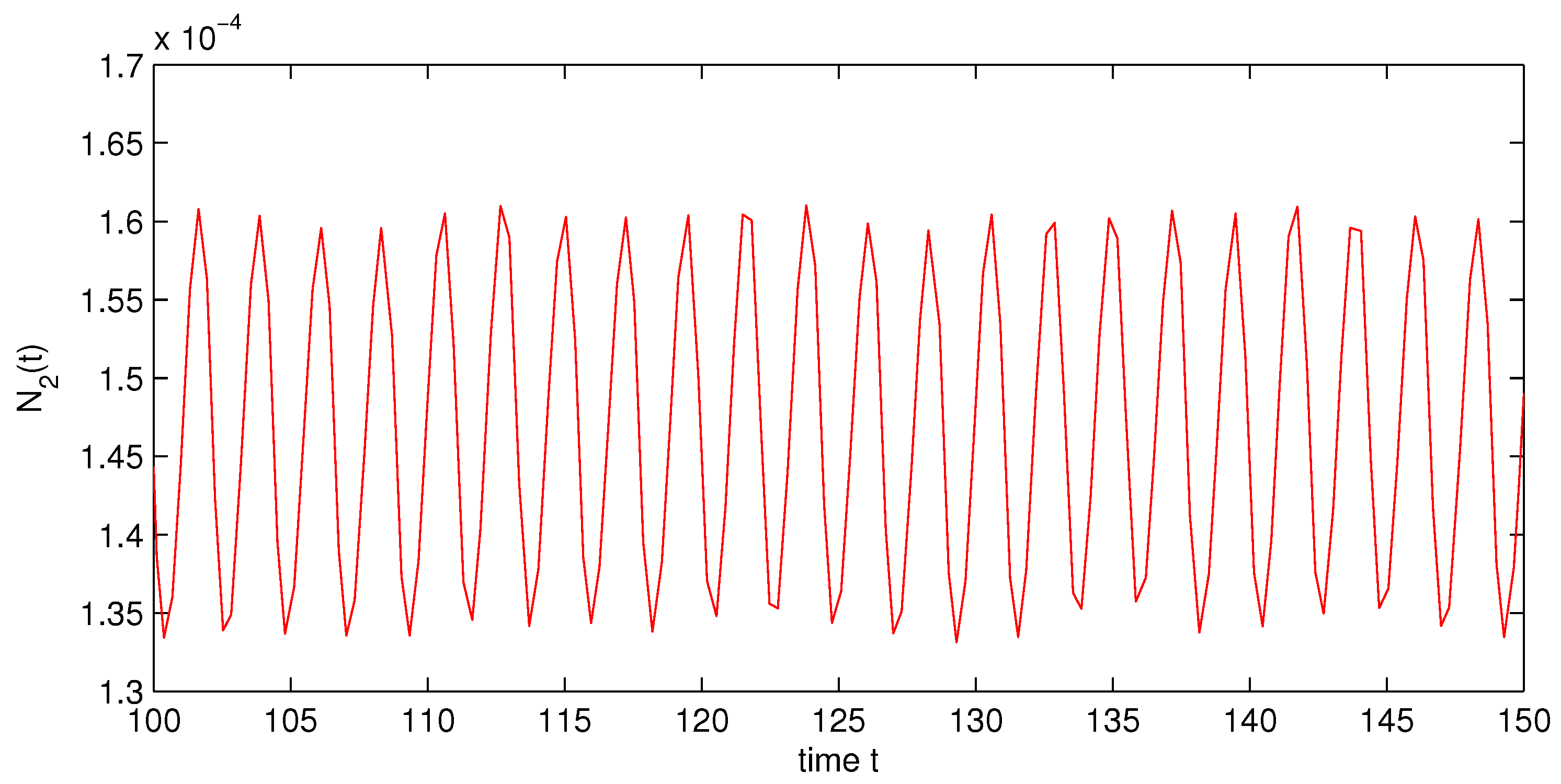
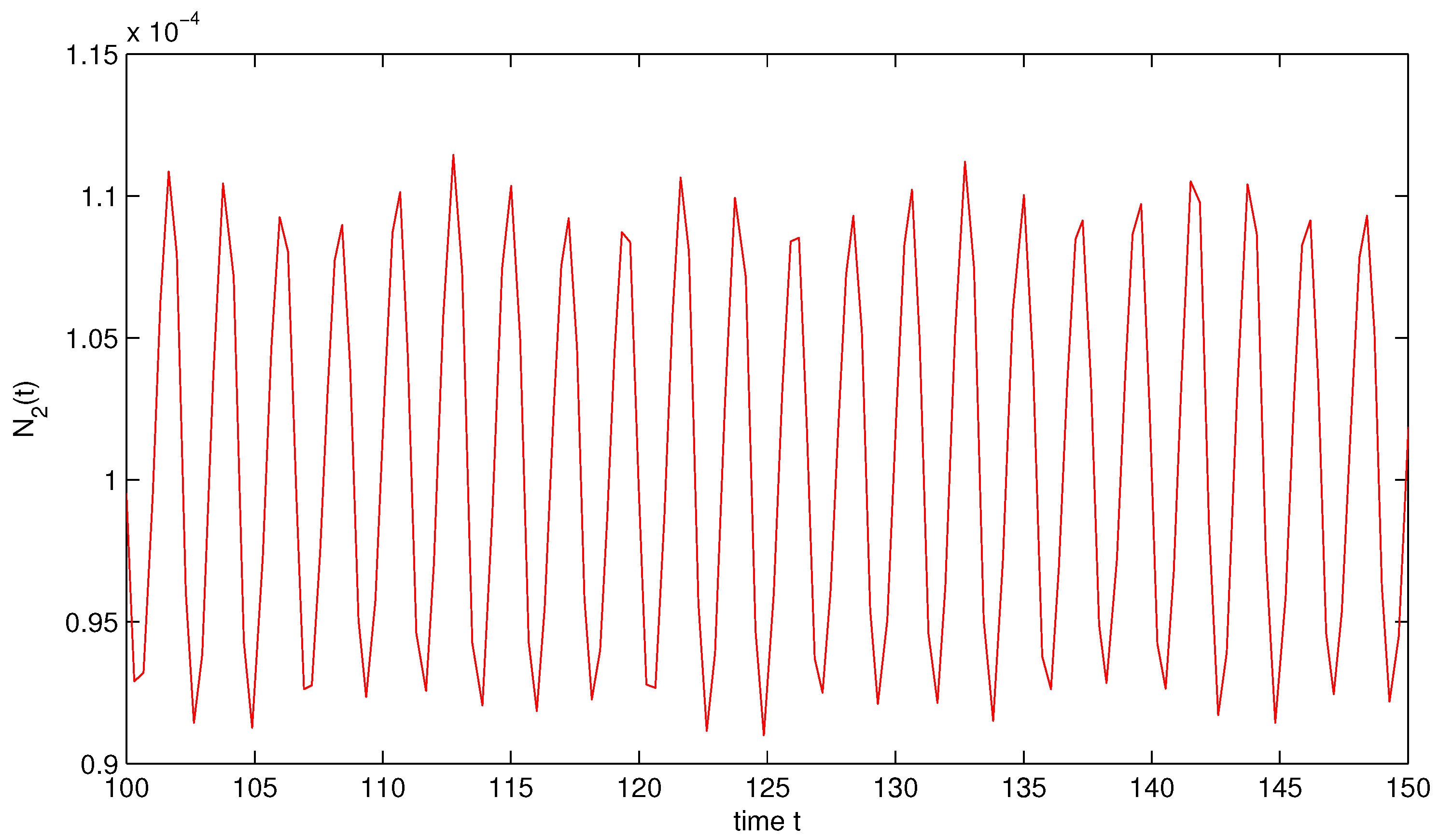
4. Two Examples and Numerical Simulations
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lotka, A.J. Elements of Physical Biology; Williams and Wilkins: Baltimore, MD, USA, 1925. [Google Scholar]
- Volterra, V. Fluctuations in the abundance of species considered mathematically. Nature 1926, 118, 558–560. [Google Scholar] [CrossRef]
- Ma, Z. Mathematical Modelling and Study of Species Ecology; Anhui Education Publishing Company: Hefei, China, 1996. [Google Scholar]
- Chen, L.; Song, X.; Lu, Z. Mathematical Models and Methods in Ecology; Scientific and Technical Publisher of Sichuan: Chengdu, China, 2003. [Google Scholar]
- Huo, H.F.; Li, W.T. Stable periodic solution of the discrete periodic Leslie-Gewer predator-prey model. Math. Comput. Model. 2004, 40, 261–269. [Google Scholar] [CrossRef]
- Hsu, S.B.; Hwang, T.W.; Kuang, Y. Global analysis of the Michaelis-Menten type ratio-dependent predator-prey system. J. Math. Biol. 2001, 42, 489–506. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Beretta, E. A stage-structured predator-prey model of Beddington-DeAngelis type. SIAM J. Appl. Math. 2006, 66, 1101–1129. [Google Scholar] [CrossRef]
- Fan, M.; Kuang, Y. Dynamics of a nonautonomous predator-prey system with the Beddington-DeAngelis functional. J. Math. Anal. Appl. 2004, 295, 15–39. [Google Scholar] [CrossRef]
- Wang, H.; Zhong, S. Asymptotic behavior of solutions in nonautonomous predator-prey patchy system with beddington-type functional response. J. Appl. Math. Comput. 2006, 172, 122–140. [Google Scholar] [CrossRef]
- Wang, H.L. Dispersal permanence of periodic predator-prey model with Ivlev-type functional response and impulsive effects. Appl. Math. Model. 2010, 34, 3713–3725. [Google Scholar] [CrossRef]
- Ding, X.; Lu, C.; Liu, M. Periodic solutions for a semi-ratio-dependent predator-prey system with nonmonotonic functional response and time delay. Nonlinear Anal. RWA 2008, 9, 762–775. [Google Scholar] [CrossRef]
- Wei, F.Y. Existence of multiple positive periodic solutions to a periodic predator-prey system with harvesting terms and Holling III type functional response. Commun. Nonlinear Sci. Numer. Simulat. 2011, 16, 2130–2138. [Google Scholar] [CrossRef]
- Liu, G.R.; Yan, J.R. Positive periodic solutions for neutral delay ratio-dependent predator-prey model with Holling type III functional response. Appl. Math. Comput. 2011, 218, 4341–4348. [Google Scholar] [CrossRef]
- Hassell, M.; Varley, G. New inductive population model for insect parasites and its bearing on biological control. Nature 1969, 223, 1133–1136. [Google Scholar] [CrossRef] [PubMed]
- Cosner, C.; DeAngelis, D.; Ault, J.; Olson, D. Effects of spatial grouping on the functional response of predators. Theor. Popul. Biol. 1999, 56, 65–75. [Google Scholar] [CrossRef] [PubMed]
- Hsu, S.B.; Hwang, T.W.; Kuang, Y. Global dynamics of a predator-prey model with Hassell-Varley type functional response. J. Math. Biol. 2008, 10, 1–15. [Google Scholar]
- Wang, K. Periodic solutions to a delayed predator-prey model with Hassell-Varley type functional response. Nonlinear Anal. RWA 2011, 12, 137–145. [Google Scholar] [CrossRef]
- Zhang, T.W. Multiplicity of positive almost periodic solutions in a delayed Hassell-Varleytype predator-prey model with harvesting on prey. Math. Meth. Appl. Sci. 2013, 37, 686–697. [Google Scholar]
- Zhang, T.W.; Li, Y.K.; Ye, Y. Persistence and almost periodic solutions for a discrete fishing model with feedback control. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 1564–1573. [Google Scholar] [CrossRef]
- Zhang, T.W.; Li, Y.K.; Ye, Y. On the existence and stability of a unique almost periodic solution of Schoener’s competition model with pure-delays and impulsive effects. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1408–1422. [Google Scholar] [CrossRef]
- Zhang, T.W.; Gan, X.R. Existence and permanence of almost periodic solutions for Leslie-Gower predator-prey model with variable delays. Elect. J. Differ. Equa. 2013, 2013, 1–21. [Google Scholar]
- Zhang, T.W.; Gan, X.R. Almost periodic solutions for a discrete fishing model with feedback control and time delays. Commun. Nonlinear Sci. Numer. Simulat. 2014, 19, 150–163. [Google Scholar] [CrossRef]
- Zhang, T.W. Almost periodic oscillations in a generalized Mackey-Glass model of respiratory dynamics with several delays. Int. J. Biomath. 2014, 7, 1450029. [Google Scholar] [CrossRef]
- Shu, J.Y.; Zhang, T.W. Multiplicity of almost periodic oscillations in a harvesting mutualism model with time delays. Dynam. Cont. Disc. Impul. Syst. B Appl. Algor. 2013, 20, 463–483. [Google Scholar]
- Liao, Y.Z.; Zhang, T.W. Almost periodic solutions of a discrete mutualism model with variable delays. Discret. Dyn. Nat. Soc. 2012, 2012, 742102. [Google Scholar] [CrossRef]
- Zhang, T.W.; Li, Y.K. Positive periodic solutions for a generalized impulsive n-species Gilpin-Ayala competition system with continuously distributed delays on time scales. Int. J. Biomath. 2011, 4, 23–34. [Google Scholar] [CrossRef]
- Fazly, M.; Hesaaraki, M. Periodic solutions for predator-prey systems with Beddington-DeAngelis functional response on time scales. Nonlinear Anal. RWA 2008, 9, 1224–1235. [Google Scholar] [CrossRef]
- Zhu, Y.L.; Wang, K. Existence and global attractivity of positive periodic solutions for a predator-prey model with modified Leslie-Gower Holling-type II schemes. J. Math. Anal. Appl. 2011, 384, 400–408. [Google Scholar] [CrossRef]
- Zhao, C.J. On a periodic predator-prey system with time delays. J. Math. Anal. Appl. 2007, 331, 978–985. [Google Scholar] [CrossRef]
- Wang, K. Existence and global asymptotic stability of positive periodic solution for a predator-prey system with mutual interference. Nonlinear Anal. RWA 2009, 10, 2774–2783. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, Y.L. Global attractivity of positive periodic solution for a Volterra model. Appl. Math. Comput. 2008, 203, 493–501. [Google Scholar] [CrossRef]
- Ding, X.Q.; Jiang, J.F. Periodicity in a generalized semi-ratio-dependent predator-prey system with time delays and impulses. J. Math. Anal. Appl. 2009, 360, 223–234. [Google Scholar] [CrossRef]
- Liu, G.R.; Yan, J.R. Existence of positive periodic solutions for neutral delay Gause-type predator-prey system. Appl. Math. Model. 2011, 35, 5741–5750. [Google Scholar] [CrossRef]
- Zhang, G.D.; Shen, Y.; Chen, B.S. Positive periodic solutions in a non-selective harvesting predator-prey model with multiple delays. J. Math. Anal. Appl. 2012, 395, 298–306. [Google Scholar] [CrossRef]
- Fink, A.M. Almost Periodic Differential Equation; Spring-Verlag: Berlin, Germany; Heidleberg, Germany; New York, NY, USA, 1974. [Google Scholar]
- He, C.Y. Almost Periodic Differential Equations; Higher Education Publishing House: Beijing, China, 1992. (In Chinese) [Google Scholar]
- Gaines, R.; Mawhin, J. Coincidence Degree and Nonlinear Differential Equations; Springer Verlag: Berlin, Germany, 1977. [Google Scholar]
- Zhang, G.D.; Shen, Y.; Chen, B.S. Bifurcation analysis in a discrete differential-algebraic predator-preysystem. Appl. Math. Model. 2014, 38, 4835–4848. [Google Scholar] [CrossRef]
- Zhang, S.N.; Zheng, G. Almost periodic solutions of delay difference systems. Appl. Math. Comput. 2002, 131, 497–516. [Google Scholar] [CrossRef]




© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Pang, L.; Liao, Y. Positive Almost Periodic Solutions for a Delayed Predator–Prey Model with Hassell-Varley Type Functional Response. Math. Comput. Appl. 2016, 21, 10. https://doi.org/10.3390/mca21020010
Zhang T, Pang L, Liao Y. Positive Almost Periodic Solutions for a Delayed Predator–Prey Model with Hassell-Varley Type Functional Response. Mathematical and Computational Applications. 2016; 21(2):10. https://doi.org/10.3390/mca21020010
Chicago/Turabian StyleZhang, Tianwei, Liyan Pang, and Yongzhi Liao. 2016. "Positive Almost Periodic Solutions for a Delayed Predator–Prey Model with Hassell-Varley Type Functional Response" Mathematical and Computational Applications 21, no. 2: 10. https://doi.org/10.3390/mca21020010