1. Introduction
In the last decade, the multi-agent system (MAS) has received foremost attention from the research community due to its wide area of application in engineering and technology, particularly with there being a requirement for coordinated activities among different entities such as robots, vehicles, or sensors. Furthermore, within the MAS, the area of most concern is the consensus problem. There are plenty of authors who address the aforesaid problem under various scenarios, such as with a leader, without a leader, with delays, with noises, with fixed and switching communication topologies, etc., as given in previous studies [
1,
2,
3,
4,
5,
6,
7,
8,
9].
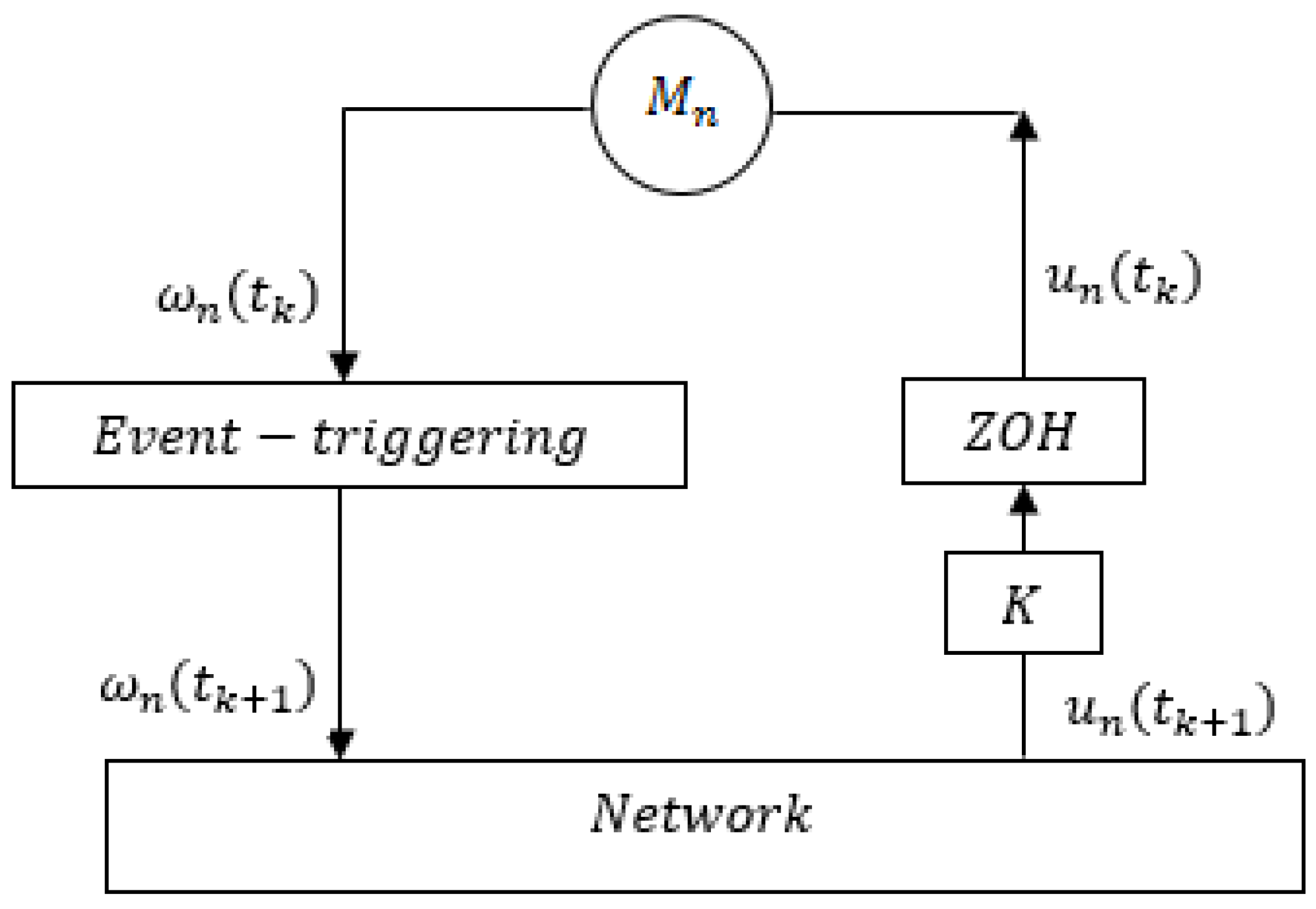
Traditionally, the control system is analyzed by the assumption of continuous system dynamics, such that the system is supposed to be receiving control command and information continuously from the controller and the neighbors. This type of communication consumes extra energy of the system. To overcome this difficulty, an event-triggered scheme is coined such that communication or control action is performed only when an event condition is violated.
Additionally, it is evident that the network control system (NCS) provides the basis for the multi-agent systems. The use of the network in the control system adds robustness and flexibility to the system by making the system adaptable to unknown disturbance and able to retain stability under any malfunctioning of the sub-system. In [
10], the detailed concept of NCS is given and it is shown that the NCS based system uses the network to transfer feedback and control signals to various system components, i.e., sensor, actuator, etc. Moreover, the author encircles different application areas of the NCS with complete analysis, in addition to discussing recent advancement in the NCS. Furthermore, in [
11], the sampled-data event-triggered control is presented for the NCS. It is shown that the sampled-data control can provide a better energy saving design of feedback controller and event threshold condition as compared to the existing design methods.
Now, under the event-triggered scheme, there are two different approaches used to model the event-triggered systems, i.e., centralized and decentralized. There is a sufficient amount of work already being performed in the MAS with the event-triggered controllers, either centralized or decentralized. In [
12], the issue of a decentralized event-triggered consensus for the second-order MAS is addressed. An event condition is defined as a ratio of error and state norm. The controller updates using information of the agent’s present state and corresponding neighbor’s state. Likewise, in [
13], a new decentralized scheme is proposed for the event-triggered control such that the requirement of monitoring the neighbor’s information does not remain necessary. Similarly, in [
14], the problem of the even-triggered consensus for the linear MAS is addressed under two different event conditions, i.e., with and without the necessity of continuous communication among neighbors. It is shown that the update scheme for the controller depends on an error, the state of neighbor and a threshold. Moreover, in [
15], the event-triggered consensus problem in the leader-following MAS is presented by assuming an input delay. It is shown that controller updates are event-driven and a consensus is reached such that the proposed conditions are satisfied. Furthermore, in [
16], a leader-following event-triggered consensus problem is presented for switching network topology. Controller updates are event-driven, depending on neighbor state and network topology. Once again, the consensus is reached such that the proposed sufficiency conditions are satisfied. In [
17], the state dependent condition is presented to address the event-triggered consensus problem with jointly connected communication topology with and without the leader. The presented event condition depends on the present, past and neighbor information of an agent. The system stability is proved by using the Lyapunov theorem and it is shown that the event-triggered consensus is reached with and without the leader. Additionally, in [
18], an event-triggered controller is proposed to address the formation control problem in the MAS. The event-driven controller updates with respect to the error to the state norm ratio. It is shown that the formation is reached by every agent with any initial condition. In [
19], an event-triggered controller is presented to address the consensus problem in the leader-following MAS under fixed topology with linear dynamics, and it is proven that the consensus is reached asymptotically.
Moreover, as far as the Linear Quadratic Regulator (LQR) is concerned, it deals with the optimal control of the system by minimizing the quadratic cost function and involving the determination of the performance index. In the LQR control problem, the optimal gain is obtained by solving the associated algebraic Riccati inequality such that the parameters
and
need to be known in order to determine the gain
and to minimize the performance index. The LQR control found application in satellite launching methods such that it become easier to determine the least possible fuel consumption or lowest time to reach the target for a satellite or any space rocket. Additionally, the LQR control is also applicable in different control problems, as given in [
20,
21,
22,
23].
So, the above-mentioned work encouraged us to further expand the methodology of the leader-following MAS with the centralized event-triggering controller to regulate the speed of the networked multi-motor system such that they regain the synchronous speed if the event condition is violated.
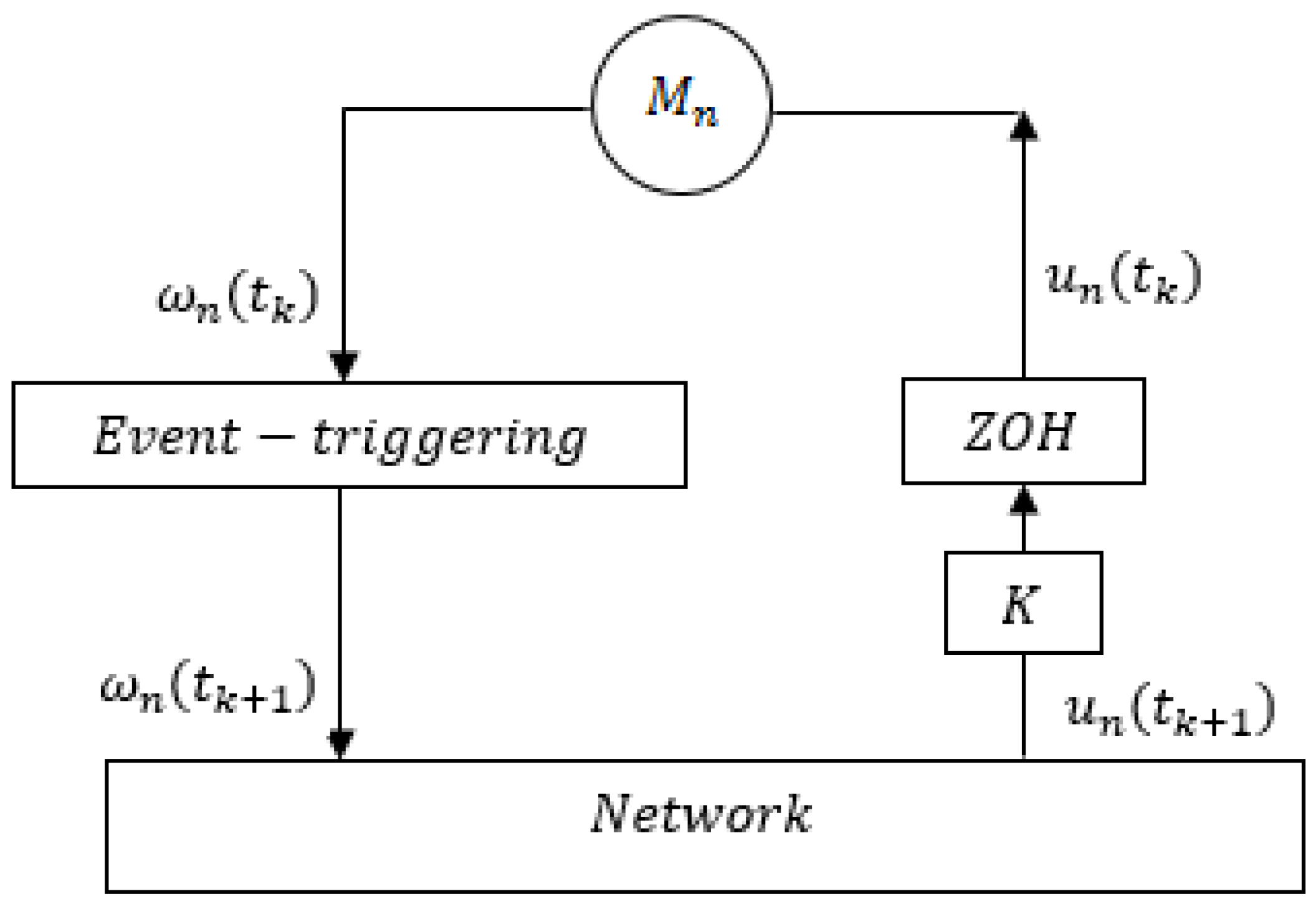
Thus, in this paper, the proposed objective is achieved by (1) designing a unique event-triggered control law aimed at addressing the synchronous control of the motor speed; (2) designing an event condition to monitor the error signal, generated if synchronous speed is disturbed; and (3) designing a common Lyapunov function to ensure the stability of the proposed system. The block diagram presentation of the proposed work for a single motor is shown in
Figure 1, which is further extended and simulated for the multi-motor system.
Remark 1. The presented paper contributes significantly to the advancement of the current speed synchronization methods adopted for the multi-motor system, which is mostly based on traditional schemes of using a wire connected system vulnerable to system cost, efficiency, malfunctioning, and extra consumption of energy.
The rest of the work is organized as follows:
Section 2 presents preliminaries related to the MAS while
Section 3 presents the system model.
Section 4 discusses the consensus protocol for speed regulation and the stability analysis of the proposed system model. Afterwards,
Section 5 presents the acquired results. Finally,
Section 6 concludes the presented work.
2. Preliminaries
In this paper, Euclidean space is represented by with -dimensions . The network topology between communicating multi-agents is presented by using the algebraic graph theory such that the graph is constituted by a set of vertex , and a set of edge . Furthermore, the vertices (agents), and are referred to be neighbors if , whereas is the neighbor set of vertex . Moreover, is the degree of vertex describing its total number of neighbors. Now, for a graph , a degree matrix described the degree of vertex along its diagonal entries. Additionally, the Laplacian matrix of the graph is given as Here, represents graph adjacency, which is if else Additionally, for undirected graphs, always holds , therefore, has real eigenvalues and is organized as .
Lemma 1. In [24], if is connected, then has as the smallest positive eigenvalue while is the smallest eigenvalue respectively. Lemma 2. In [25], if is connected and holds the property . Remark 2. In undirected graphs, the Laplacian matrix holds , satisfying the property of the sum of the square, i.e., .
Definition: An event-triggered leader-following consensus is reached for the system given by Equation (5), under the proposed event transmission approach and control protocol such that for .
Lemma 3. In [26], a symmetric positive definite matrix exists for the connected graph and subgraph holding property . Remark 3. In the case of the leader-following MAS, the matrix plays an important role such that the matrix is symmetric positive definite if and only if the node is reachable in , whereas node is allocated for the leader, and defines the adjacency of the node as such that if there is a neighbor to the leader, otherwise .
Lemma 4. In [27], have real eigenvalues in addition to the property of having an orthogonal matrix . Remark 4. Since is the symmetric positive definite matrix, holds. Now, a symmetric matrix can also be defined as where is the orthogonal matrix, then the matrix is written as 3. System Modeling
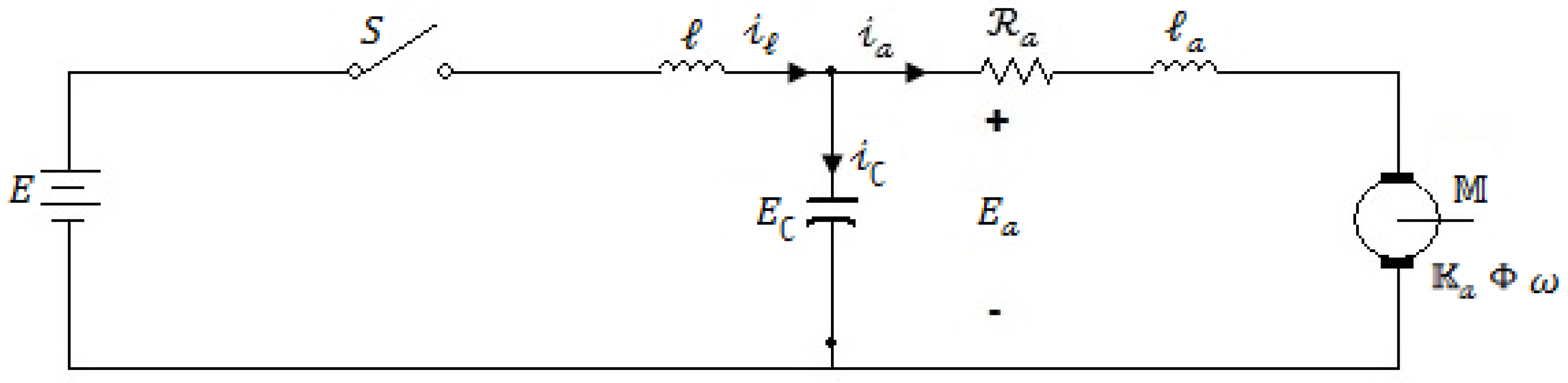
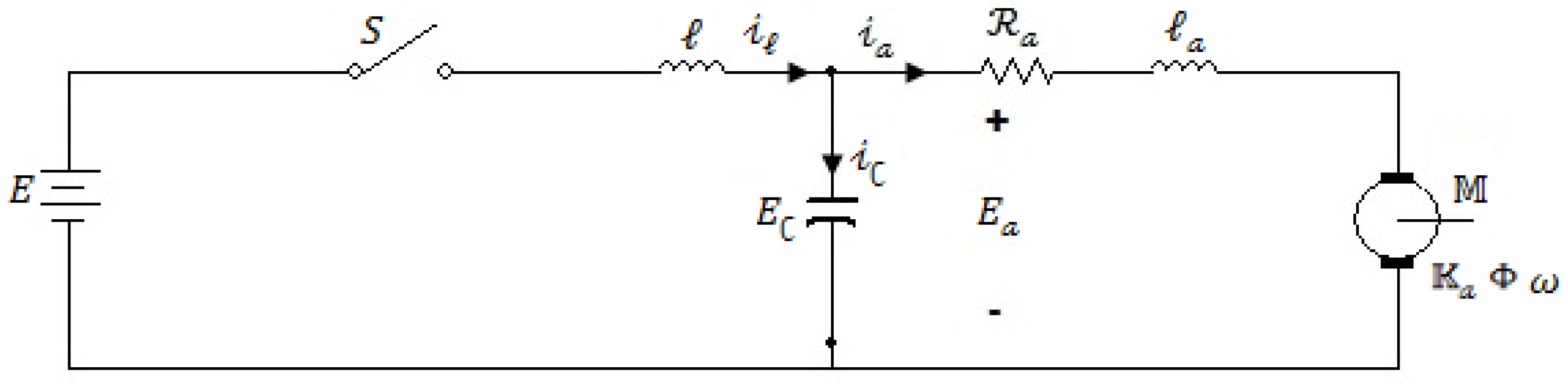
The electric motor system proposed in this paper consists of a Buck converter driving a DC motor. The state space model of the buck converter is given in [
28].
Where
is the capacitance,
is the inductance,
is the capacitor voltage,
is the inductor current,
is the voltage supply. While the DC motor model is presented as given in [
28].
Where
is the armature resistance,
is the armature inductance,
is the armature current,
is the speed,
is the armature voltage,
is the motor inertia, and
is the motor back electromotive force (emf) constant,
is the motor design constant and
is the motor field flux. When a DC motor is joined with the buck converter, the transformation in the inductor current and capacitor voltage is presented as
Thus, the dynamics of the single (
) agent are presented as
where
is the switching signal with
arrangements and
is the proposed controller.
where
is the switch position. Suppose that
and
, then
Similarly, if
and
, then
So, the dynamics of the
agent are written as
If
(loaded torque) is included in the system analysis, then
where
The proposed motor specifications are given in
Table 1, whereas the motor model along with the chopper circuit is given by
Figure 2.
Assumption 1. Suppose that the system matrices and are stable.
Assumption 2. Assume that the system matrices and are controllable.
It is apparent that, if the agent is not only controllable but also observable, then all of the network agents are able to follow the leader’s trajectory and reach the consensus, i.e., synchronize with the leader speed.
4. Consensus Design and Stability Analysis
The system theory proposed in the earlier section is verified in this part of the paper using the concept of graph theory and the closed loop system behavior of the event-triggered leader-following MAS. First, error dynamics (commonly called measurement error), of the
agent are given as
where
is the
event at which the
agent is triggered. Moreover, the error dynamics of the complete system are given as
. It is obvious that
exists because of
therefore, when the leader is reachable by a follower, an error will decrease. It is already understood that in the leader-following MAS, the leader’s trajectory is unaffected by a follower, thus
always. Now, the centralized event-triggering condition is given as
Thus, it is obvious that an event will be triggered whenever the norm of
surpasses the threshold, thereby resetting
to zero and
agent state is communicated. Now, the centralized control protocol for the
following agent is given as
Observing Equation (16), it is clear that depends on local information. At this point, it is worth mentioning that the term centralized denotes the synchronization of the event-triggering time sequence for all the agents, i.e., information update for all the following agents is synchronized.
The error dynamics between the leader and
follower are given as
and
then
Now, considering
w.r.t. the closed loop dynamics of the MAS yield
Using the property of the Kronecker product of the matrix gives
Now, at this stage, it is necessary to introduce the cost function of the LQR which is given as
Such that the matrices
and
are positive definite. Now, to minimize
, if assumptions 1 and 2 hold, then a symmetric (and positive definite) matrix
and a feedback matrix
exist to the given Riccati inequality and
whereas
.
In order to ensure the stability of the proposed switched system, a common Lyapunov stability criteria is adopted such that the Lyapunov function candidate is given as
Again, using the properties of Kronecker products and rearranging the above equation gives
Now, putting the value of
and rearranging the above equation gives
Finally, using the triggering condition in equation (15) and equation (25), we have
5. Results
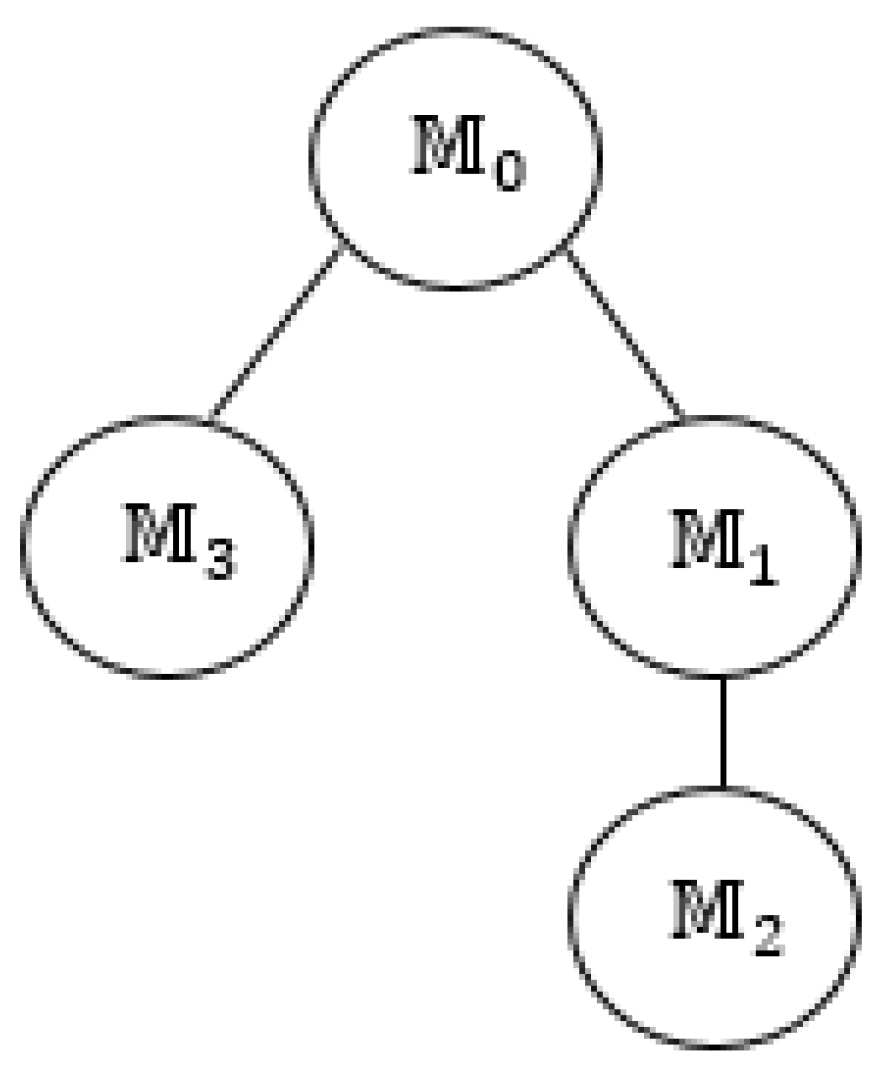
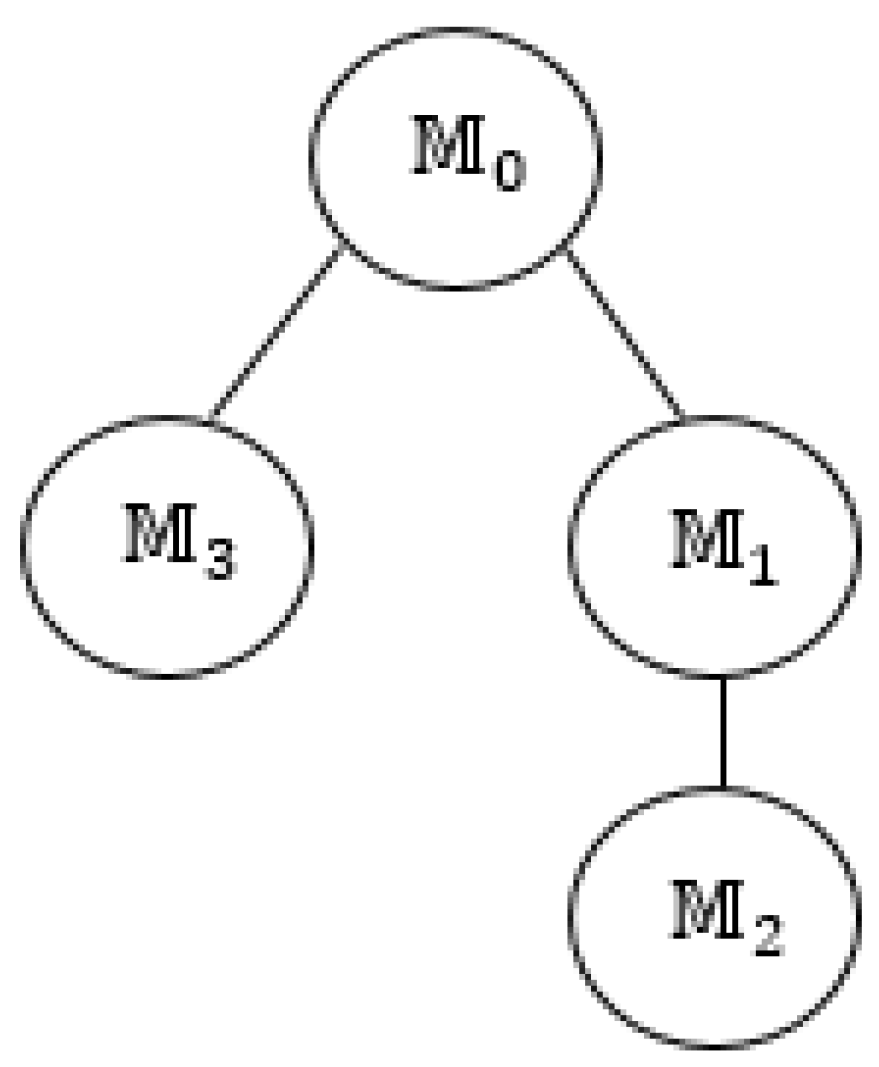
In this part of the paper, the complete analysis of the event-triggered MAS is presented using the methodology proposed in the above-mentioned sections. For the purpose of simulation, the multi-motor system is supposed to be connected in the manner given in
Figure 3, with one leader
and three following agents, i.e.
. Moreover, it is also assumed that no load is applied to the motors and communication is delay-free.
To begin with the system analysis, the system matrices are obtained to be
Now, with respect to the communication pattern of
Figure 3, the matrices
and
, certifying lemma 1 and 2, are given as
The minimum eigenvalue of
is 0.3820 while the highest value is 2.6180, certifying lemma 3 and 4, thus
is taken to be 0.72. Now, if
is supposed to be 1, then the feedback matrix
and matrix
are given as
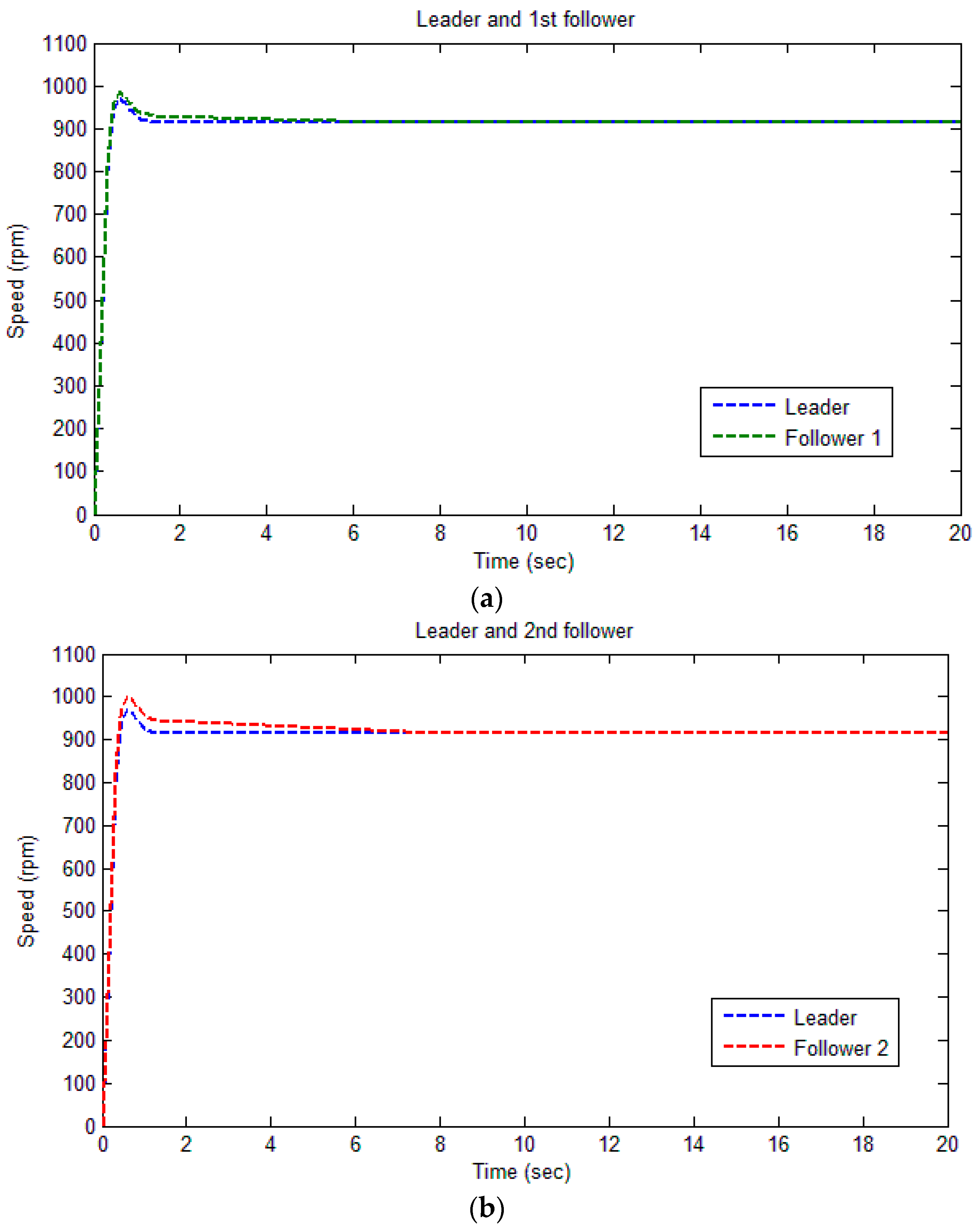
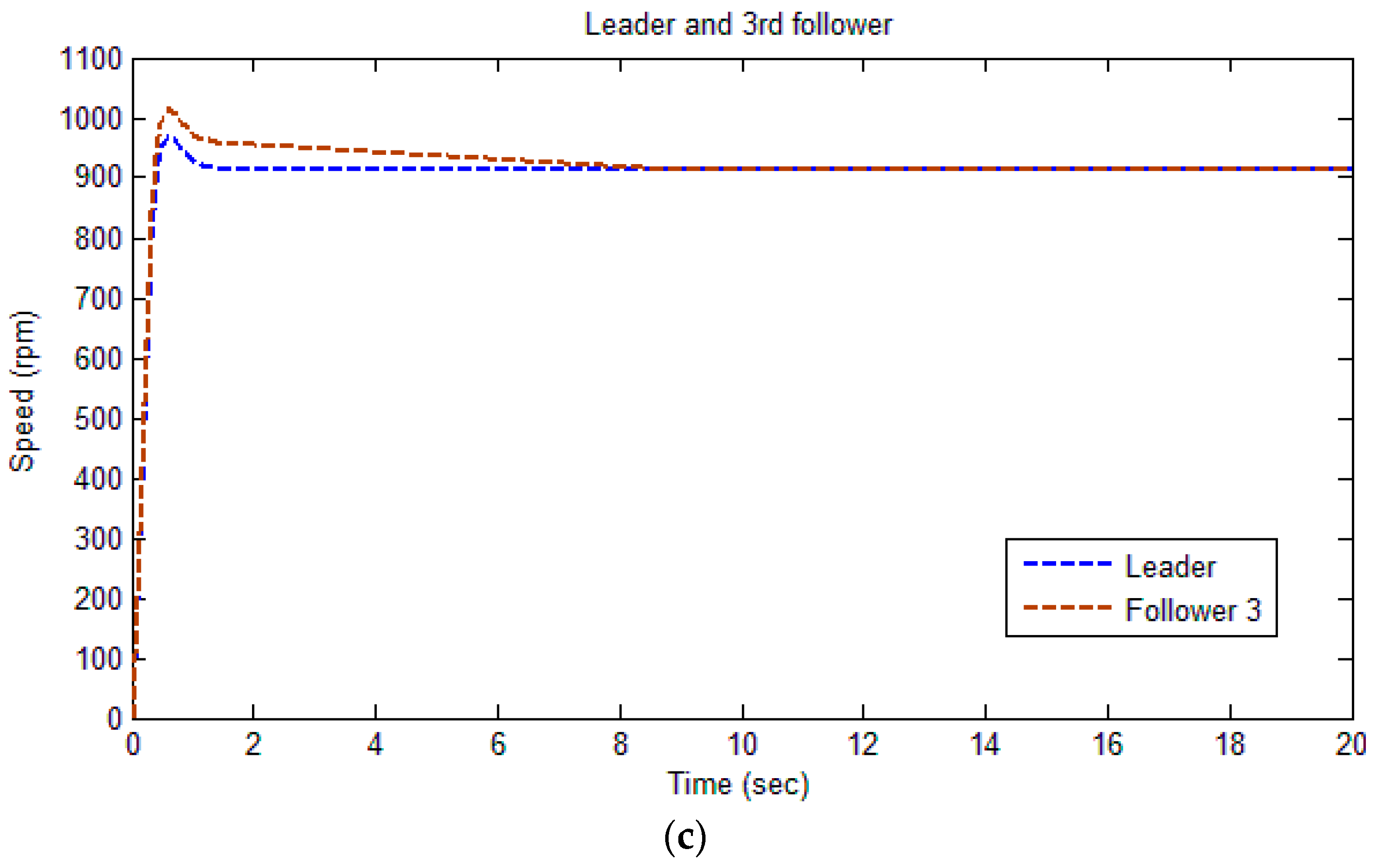
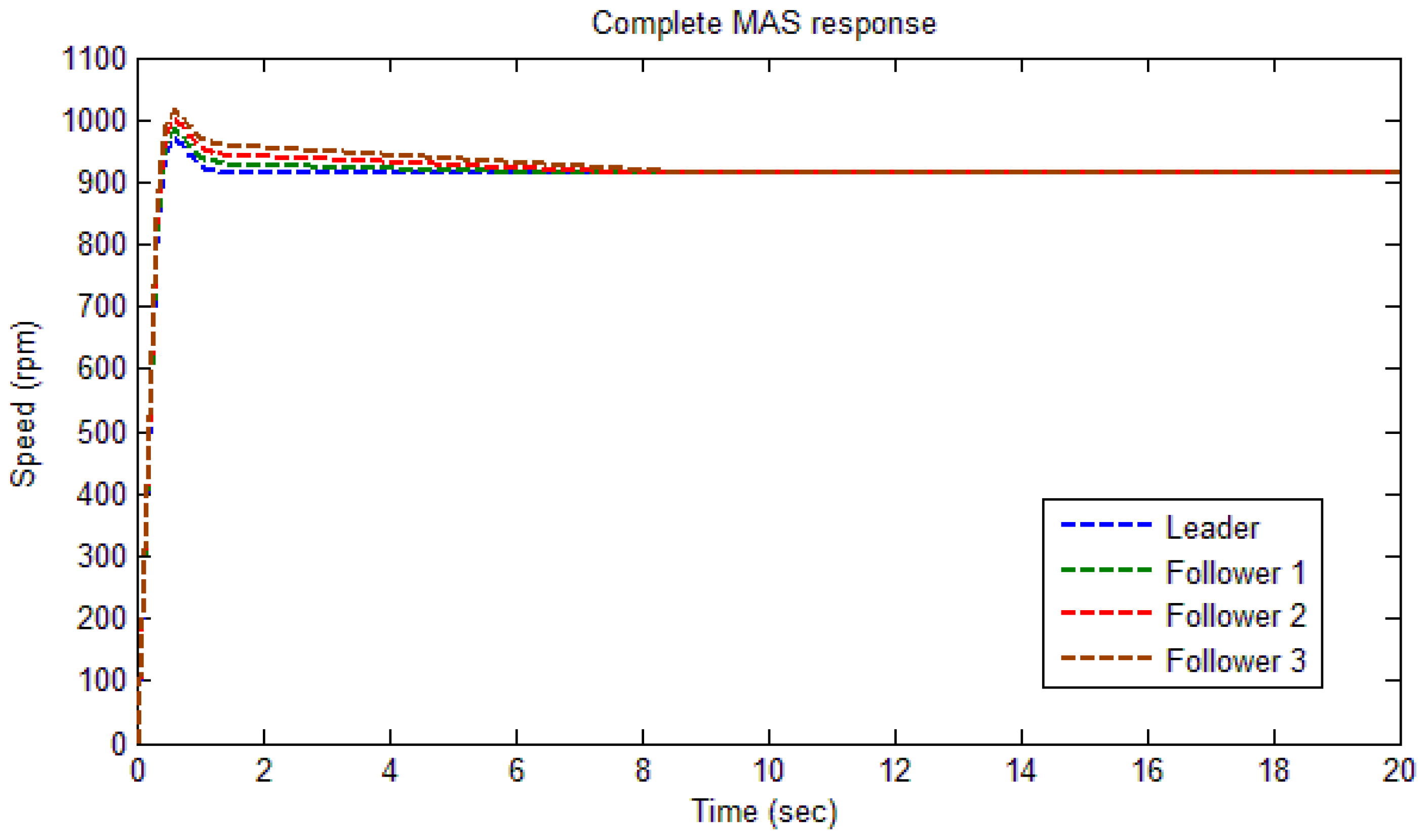
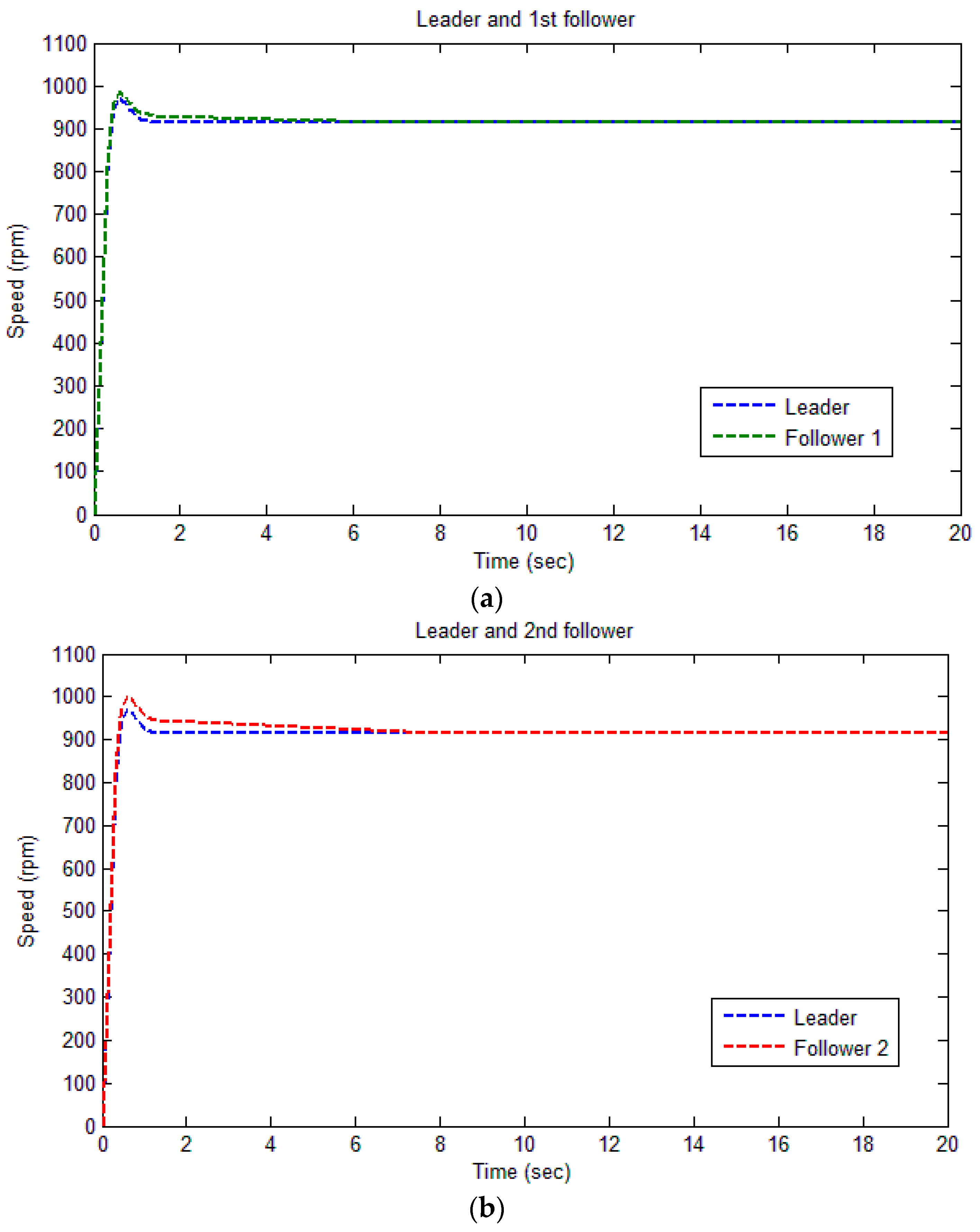
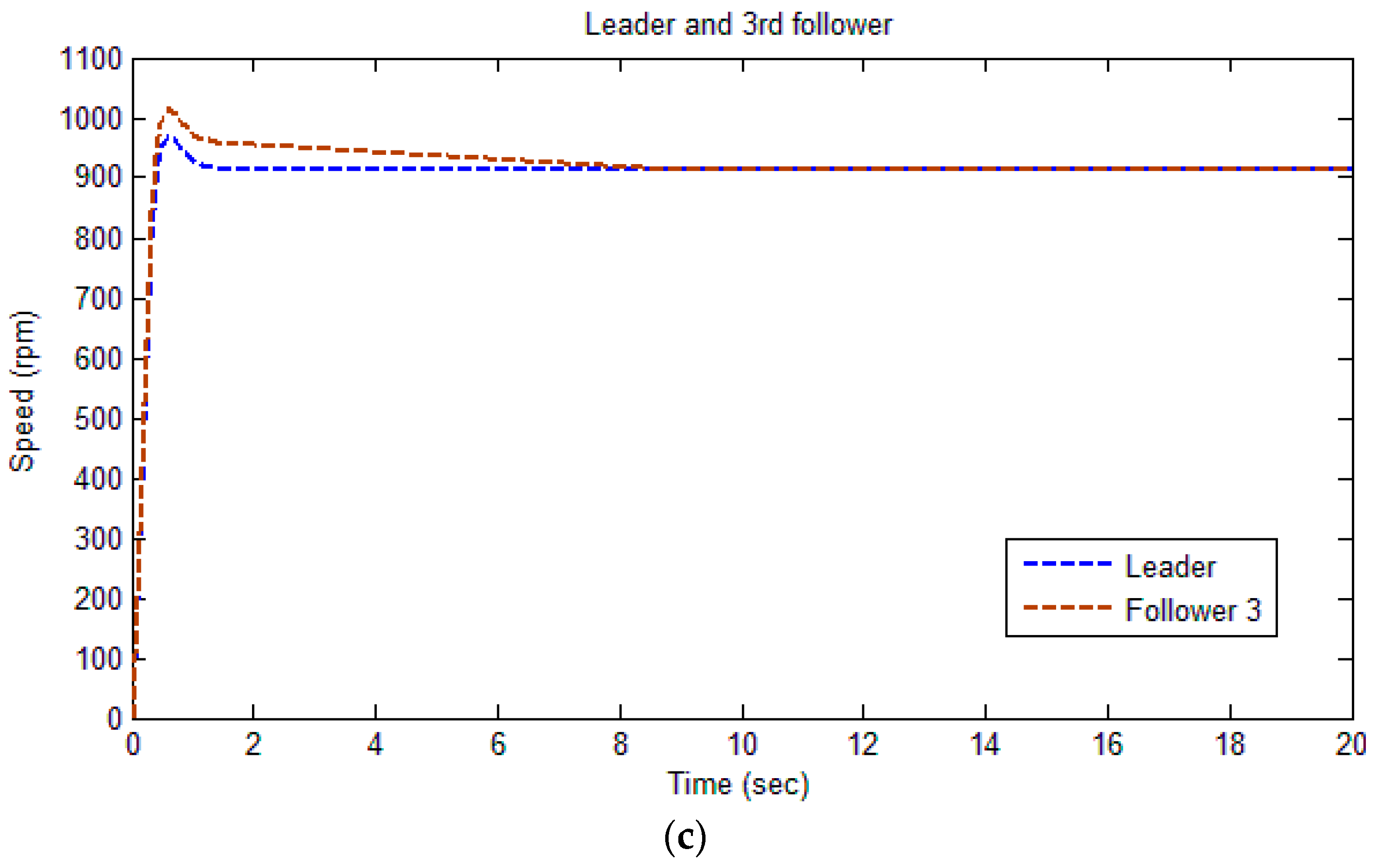
Thus, it is shown in
Figure 4a–c and
Figure 5 that the consensus is reached among the leader and followers, such that all the following agents regulate the speed in synchronization with the leader.
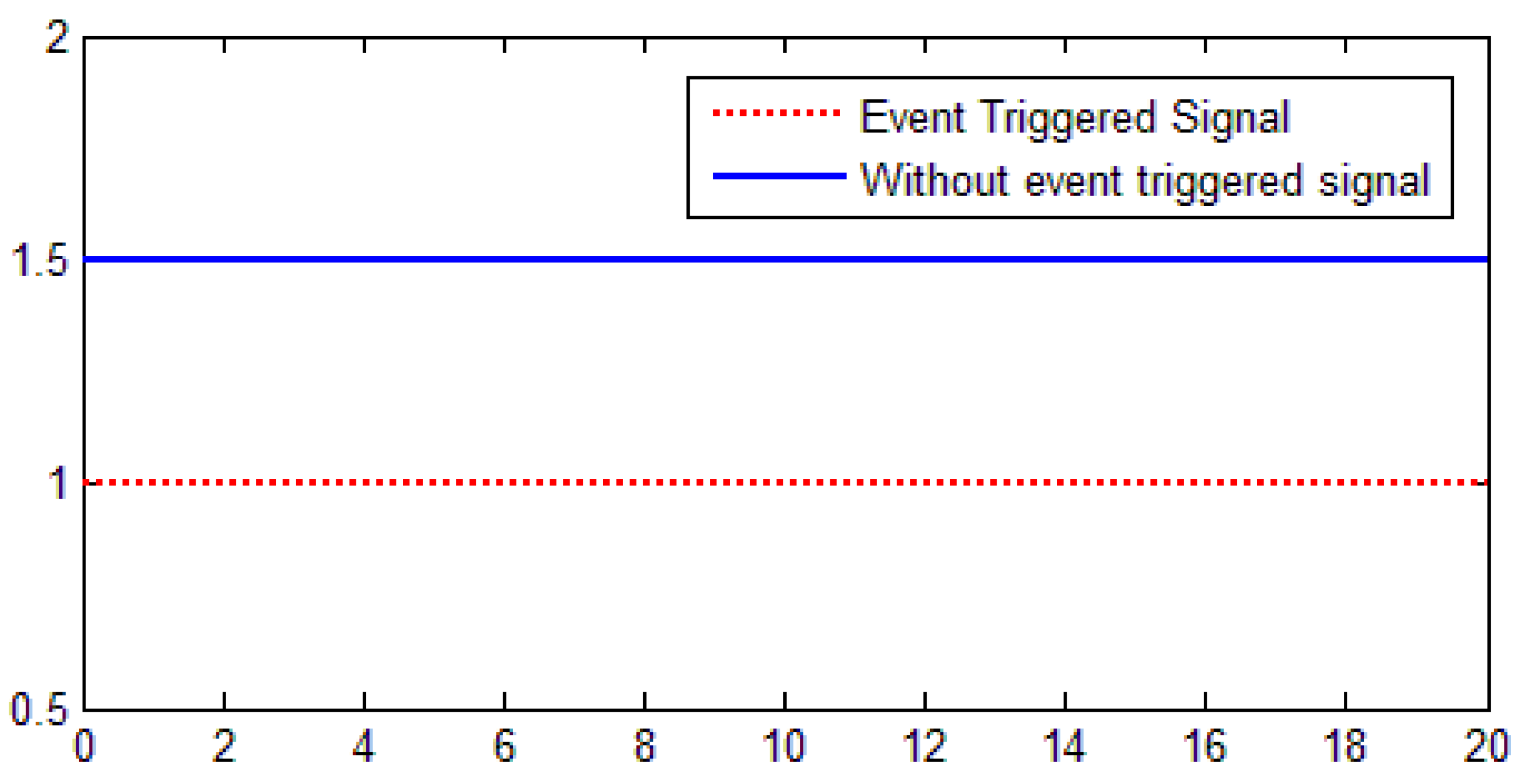
Figure 6 provides the time at which events are triggered between intervals [0, 20 s].
Figure 6 also validates the energy saving strategy as compared to the system without event-triggering schemes.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}